


Faça um veículo robótico sem fio usando sensores infravermelhos
Um robô é um agente mecânico ou virtual artificial, geralmente uma máquina eletromecânica que é guiada por um programa de computador usando circuitos eletrônicos. Os robôs podem ser autônomos ou semi-autônomos e variam de humanóides como Honda's é o Passo avançado em Mobilidade Inovadora e TOSY's. TOSY Ping Pong Jogando Robot para robôs industriais, robôs de assistência de patentes, robôs operacionais médicos, robôs de terapia canina, robôs de enxame programados coletivamente e até nanorrobôs microscópicos. Ao representar uma vida como uma aparência ou automatizar movimentos, um robô pode transferir um senso de inteligência ou por conta própria. Este artigo discute veículos robóticos sem fio baseados em sensores infravermelhos.
O que é um veículo robótico sem fio?
O robô é uma tecnologia que lida com o projeto, construção, operação e aplicação de robôs, bem como sistemas de computador, é usada para controlar, feedback sensorial e processamento de informações são chamados de robôs. Esta tecnologia lida com máquinas automatizadas que podem ser colocadas por humanos em ambientes perigosos, ou se assemelham a humanos na aparência e no comportamento. Hoje em dia, os robôs são inspirados na natureza, contribuindo para o campo da robótica bioinspirada. Esses robôs também criaram um novo ramo da robótica e da robótica leve. As técnicas mecânicas desenvolvidas durante a era industrial, existem aplicações mais práticas, como máquinas automatizadas, controle remoto e controle remoto sem fio.

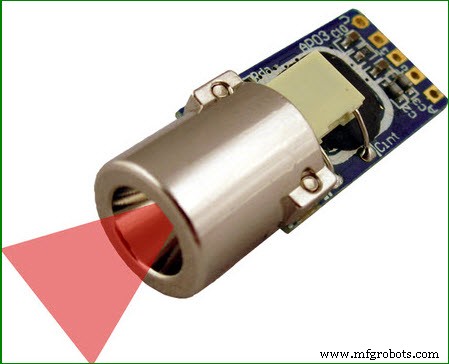
O que é um sensor infravermelho?
Um sensor IR é um dispositivo que emite para sentir alguns aspectos do ambiente que detecta a radiação IR que incide sobre ele. O emissor é simplesmente um IR LED (Light Emitting Diode) e o detector é simplesmente um fotodiodo IR que é sensível à luz IR do mesmo comprimento de onda emitida pelo LED IR. Quando a luz IR incide sobre o fotodiodo, as resistências e tensões de saída mudam em proporção à magnitude da luz IR recebida. Existem muitos tipos de sensores infravermelhos que são construídos e podem ser construídos dependendo da aplicação. Sensores de contraste (usados em robôs de seguimento de linha), sensores de proximidade (usados em telefones com tela de toque) e sensores de obstrução (usados para contagem de mercadorias e em alarmes contra roubo) são alguns exemplos.
Robô sem fio com controle remoto de radiofrequência
O veículo robótico sem fio controlado por RF inclui principalmente um transmissor de RF e um receptor de RF.
Transmissor RF
Módulos de RF geralmente são de tamanho muito pequeno e operam na faixa de tensão de 3 V a 12 V. Os módulos transmissores de RF são projetados para funcionar apenas com frequência de 433 MHz. Se estiver transmitindo o zero lógico, nenhuma energia será consumida pelo transmissor. Para transmitir, a lógica é uma, consome cerca de 4,5 mA com 3V. O transmissor e o receptor fazem interface com os microcontroladores 8051 e obtêm a operação desejada. O transmissor de RF forneceu tensão na faixa de 3 V a 6 V e potência de saída na faixa de 4 V a 12 V.
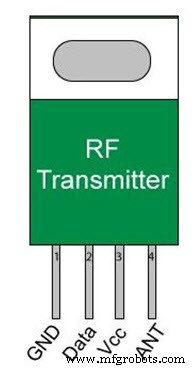
O diagrama do circuito do transmissor RF mostrado abaixo é usado para conectar diferentes botões para mover o veículo robótico em diferentes direções, como para frente, para trás, direita e esquerda. Assim, pressionando o botão apropriado, podemos controlar o movimento do veículo robótico.
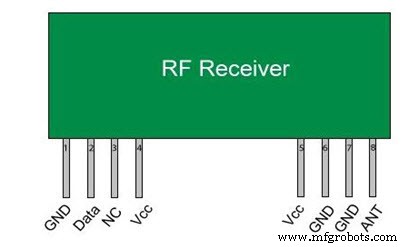
Receptor RF
O receptor de RF também é pequeno e o receptor de RF tem corrente de alimentação de 3,5 mA com uma tensão operacional de 5 V. Os módulos transmissores de RF são projetados para funcionar apenas com 433 MHz (que deve corresponder à frequência do transmissor para fins de comunicação para receber sinais do transmissor).
Comunicação RF usando o veículo robótico
A radiofrequência (RF) consiste em um transmissor e um receptor, que é conectado a um circuito isolado a ser controlado. Um sinal de controle é transferido da extremidade do transmissor na forma de ondas de rádio ou ondas eletromagnéticas, de modo a controlar o dispositivo remotamente, que está conectado à extremidade do receptor. Esse sinal de controle é transmitido por ondas eletromagnéticas ou ondas de rádio de radiofrequência. Assim, o sinal de controle recebido na extremidade do receptor obtém a saída precisa, como um veículo robótico, robô para fins especiais, dispositivo para fins de comunicação e assim por diante.
Veículo robótico controlado por RF
O objetivo principal deste projeto é projetar um veículo robótico controlado por um controle remoto de TV. Aqui, o sistema proposto usa tecnologia RF para operação remota. Um sensor IR é conectado à unidade de controle do robô para detectar os sinais infravermelhos que são transmitidos pelo controle remoto. Uma série 8051 do microcontrolador é usada para a operação preferida.
Na seção de transmissão (TX), os botões são usados para enviar os comandos para a extremidade do receptor para controlar o movimento do robô, seja para se mover em quatro direções como para frente, para a direita ou para trás e à esquerda, etc. Na seção de recepção, dois motores fazem interface com o microcontrolador da família 8051, onde são usados para o movimento do veículo.

O controle remoto da TV gera dados baseados em RC5 que são recebidos por um receptor infravermelho conectado ao microcontrolador. O programa embutido no microcontrolador se refere ao código para produzir saída preferencial com base nos dados de i / p para funcionar os motores por meio de um driver de motor IC.
O transmissor RF funciona como um controle remoto RF que tem a vantagem de amplo alcance (até 200 metros) com uma antena adequada, enquanto o receptor decodifica antes de fornecê-lo a outro microcontrolador para acionar motores DC através do driver de motor IC para o trabalho necessário.
Além disso, este projeto pode ser aprimorado usando a tecnologia DTMF. Usando a tecnologia RF, podemos controlar o robô usando um telefone celular. Essa tecnologia tem uma vantagem sobre o longo alcance de comunicação em comparação com a tecnologia RF.
Portanto, tudo se resume a veículos robóticos sem fio baseados em sensores infravermelhos. Esperamos que você tenha um melhor entendimento deste conceito. Além disso, qualquer dúvida em relação a este conceito ou projetos elétricos e eletrônicos, por favor, dê seu feedback na seção de comentários abaixo. Aqui fica uma pergunta para você, qual é a principal função do sensor de infravermelho?
Sensor
- Dia dois no IoT World:Usando DDS para tornar as cortinas de janela inteligentes ainda mais inteligentes
- Projetor laser interativo usando sensores Zigbee
- Sensores analógicos no Raspberry Pi usando um MCP3008
- Saber quando usar sensores para soldagem robótica
- Estudantes constroem sistema robótico de triagem de lixo usando tecnologia B&R
- Teste de sensores em neblina para tornar o transporte futuro mais seguro
- Imitando mãos humanas para fazer sensores melhores
- Sensores de deformação ultrafinos e altamente sensíveis
- Sensores de deformação ultrafinos e sem bateria para braços robóticos industriais
- Como fazer os eletrônicos de amanhã usando grafeno impresso a jato de tinta