


Projeto magnético de efeito Hall:Configurações frontais e deslizantes
Saiba como o efeito Hall é usado em aplicações de detecção de posição.
A detecção de posição é uma das aplicações mais importantes dos sensores de efeito Hall. Um dispositivo de efeito Hall detecta a força do campo magnético aplicado. Para detectar a posição de um objeto, podemos afixar um pequeno ímã permanente ao objeto. Conforme o objeto move o ímã em relação ao dispositivo Hall, a intensidade do campo magnético muda. Essas alterações podem ser processadas pelo sistema para detectar a posição do objeto.
Existem várias configurações diferentes de sensor-ímã que podem ser usadas em aplicações de detecção de posição baseadas no efeito Hall. Com cada configuração de sensor-ímã, o ímã é movido em relação ao sensor de uma maneira diferente. Isso afeta o campo magnético detectado pelo dispositivo Hall e altera as características do sistema.
Neste artigo, daremos uma olhada em algumas das configurações magnéticas básicas que são usadas na detecção de posição baseada no efeito Hall e discutiremos suas vantagens e desvantagens.
Configuração direta
A configuração magnética mais simples é a detecção frontal mostrada na Figura 1.
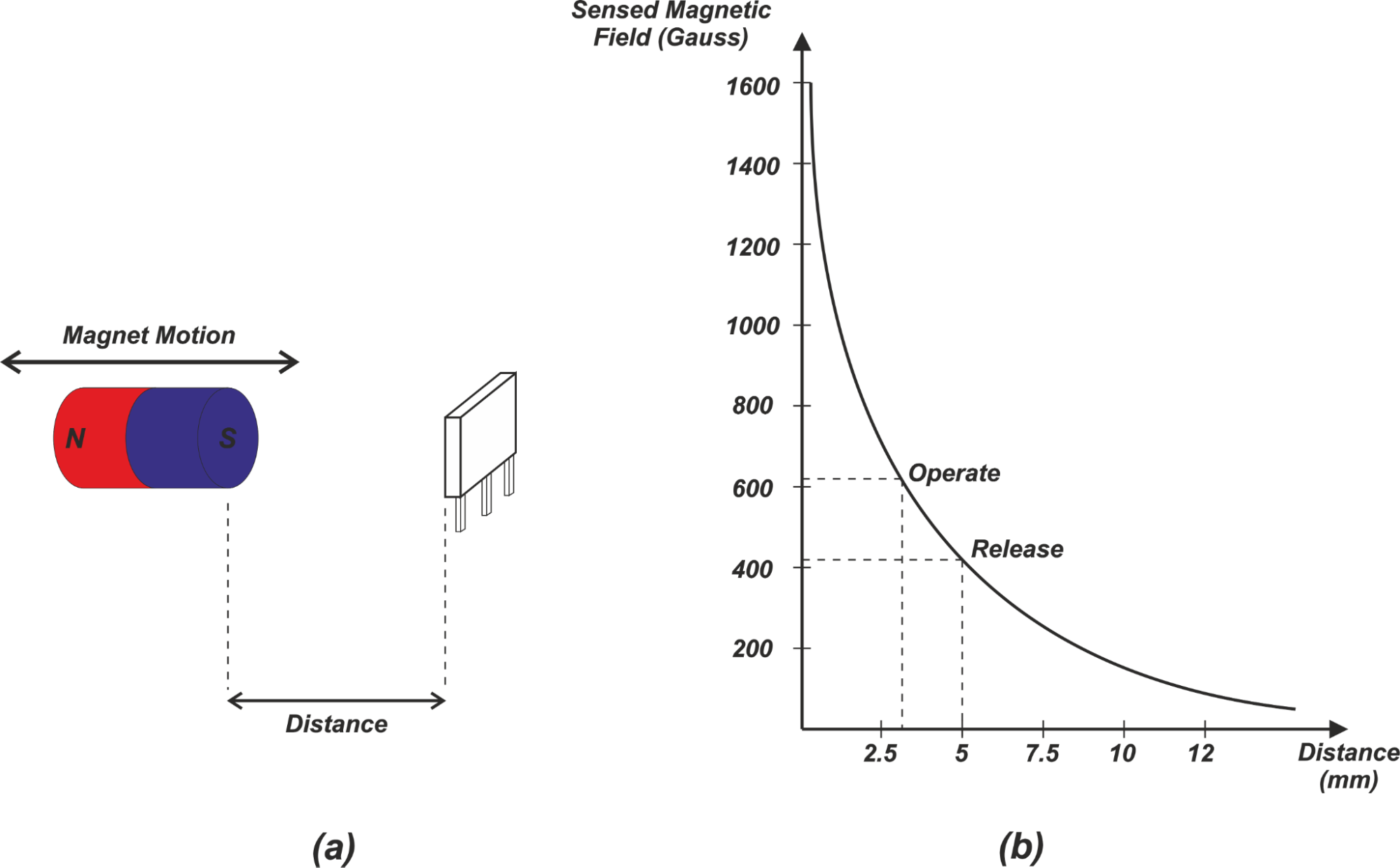
Figura 1.
Nesse caso, o pólo sul do ímã é movido diretamente para perto ou para longe do sensor. Quando o ímã está muito próximo do sensor, um grande número de linhas magnéticas de fluxo passa pela face sensora do sensor. No entanto, conforme o pólo sul do ímã se afasta do sensor, a intensidade do campo magnético diminui rapidamente, conforme mostrado na Figura 1 (b).
Observe que a curva de Gauss versus distância às vezes é chamada de mapa de fluxo da estrutura. A densidade do fluxo magnético da configuração frontal é inversamente proporcional ao quadrado da distância entre o ímã e o sensor. Os valores de fluxo dados na Figura 1 (b) podem ser produzidos por um ímã que tem aproximadamente 30 mm de comprimento e tem um diâmetro de cerca de 6 mm.
Aplicativo:Detectando a presença de um objeto
A configuração frontal pode ser usada com um sensor de efeito Hall digital (ON / OFF) para detectar a presença de um objeto. Suponha que a operação magnética e os pontos de liberação do sensor são mostrados na Figura 1 (b). O ponto de operação magnético especifica o nível de um campo magnético de reforço no qual um dispositivo Hall é ativado. O ponto de liberação magnética corresponde ao enfraquecimento do campo magnético no qual o dispositivo Hall desliga.
Conforme o ímã se aproxima do sensor, a intensidade do campo magnético se torna cada vez maior. A uma distância de cerca de 3,1 mm, o campo magnético detectado é igual ao ponto de operação magnético (cerca de 620 Gauss em nosso exemplo) que liga o sensor. Aproximar o ímã do sensor leva a um campo magnético ainda maior e mantém o sensor LIGADO. Quando o sensor se afasta do ímã, o campo magnético diminui.
No entanto, desde que o campo magnético não seja menor que o ponto de liberação (cerca de 420 Gauss em nosso exemplo), o sensor permanece LIGADO. Somente quando o campo magnético cai abaixo do ponto de liberação o dispositivo desliga. Desta forma, podemos detectar a presença de um objeto.
Limitações da detecção frontal
Esta configuração é menos precisa principalmente em termos da distância que faz o sensor desligar. Isso se deve ao fato de que a inclinação do mapa de fluxo (a curva de Gauss versus distância) é menor em torno do ponto de liberação. Uma dada variação no valor do ponto de liberação magnética pode levar a uma variação relativamente grande no valor da distância na qual o sensor desliga. A mesma variação no ponto de operação magnético leva a uma menor variação de distância. Isso é ilustrado na Figura 2.
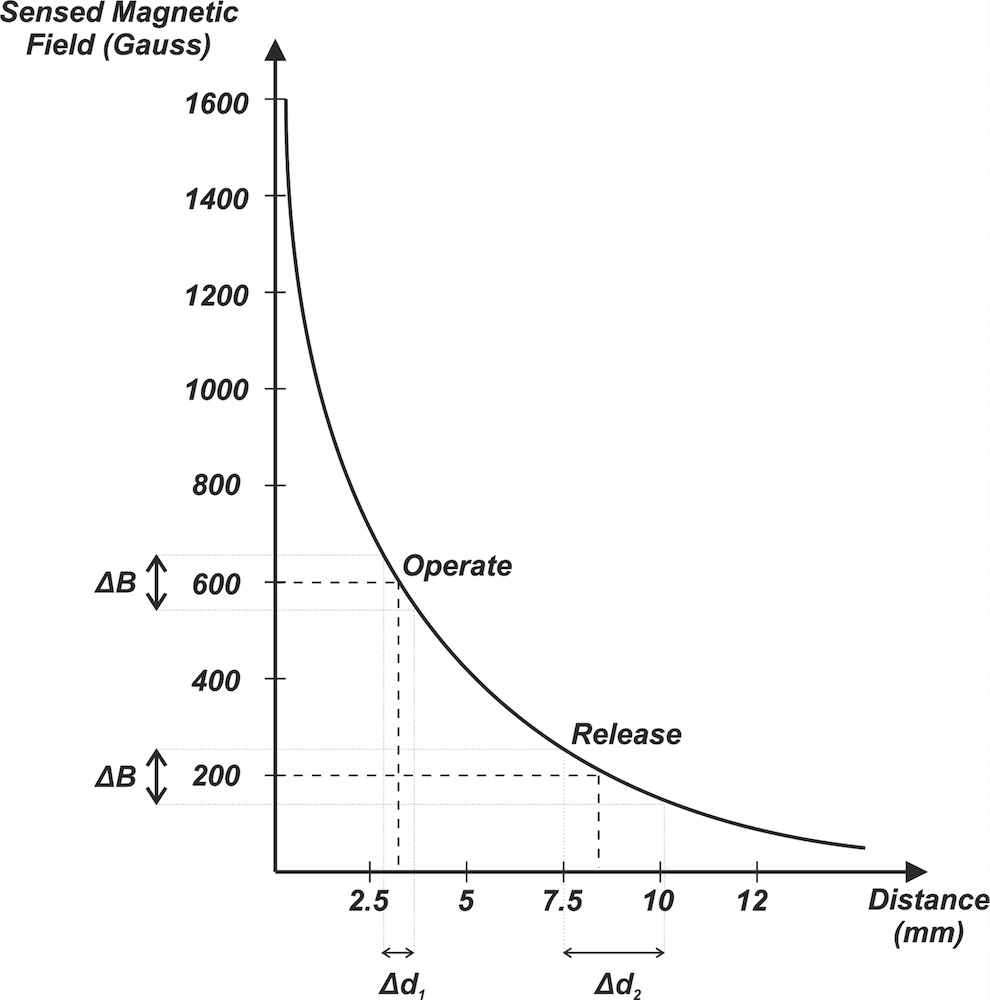
Figura 2
Suponha que a variação de unidade para unidade dos pontos de operação e liberação são ΔB para um sensor hipotético, conforme mostrado na Figura 2. Uma vez que a curva tem uma inclinação maior no ponto de operação magnético, Δd 1 é muito menor que Δd 2 . Conseqüentemente, a distância correspondente ao ponto de operação magnético será mais consistente entre as diferentes placas.
Outra desvantagem é que a detecção frontal não pode ser usada para detectar grandes faixas de deslocamento porque as linhas do campo magnético decaem muito rapidamente. Além disso, na configuração frontal, a relação entre o campo detectado e a distância não é linear. Isso torna a detecção de movimentos de curso longo um desafio quando a medição da posição linear é necessária. Devido a essas limitações, a detecção frontal é geralmente usada como um detector de proximidade em aplicações onde os requisitos de precisão não são muito exigentes.
Detecção de deslizamento unipolar
Nesse arranjo, um único pólo do ímã se move lateralmente, passando a face de detecção do sensor. Isso é mostrado na Figura 3 (a).
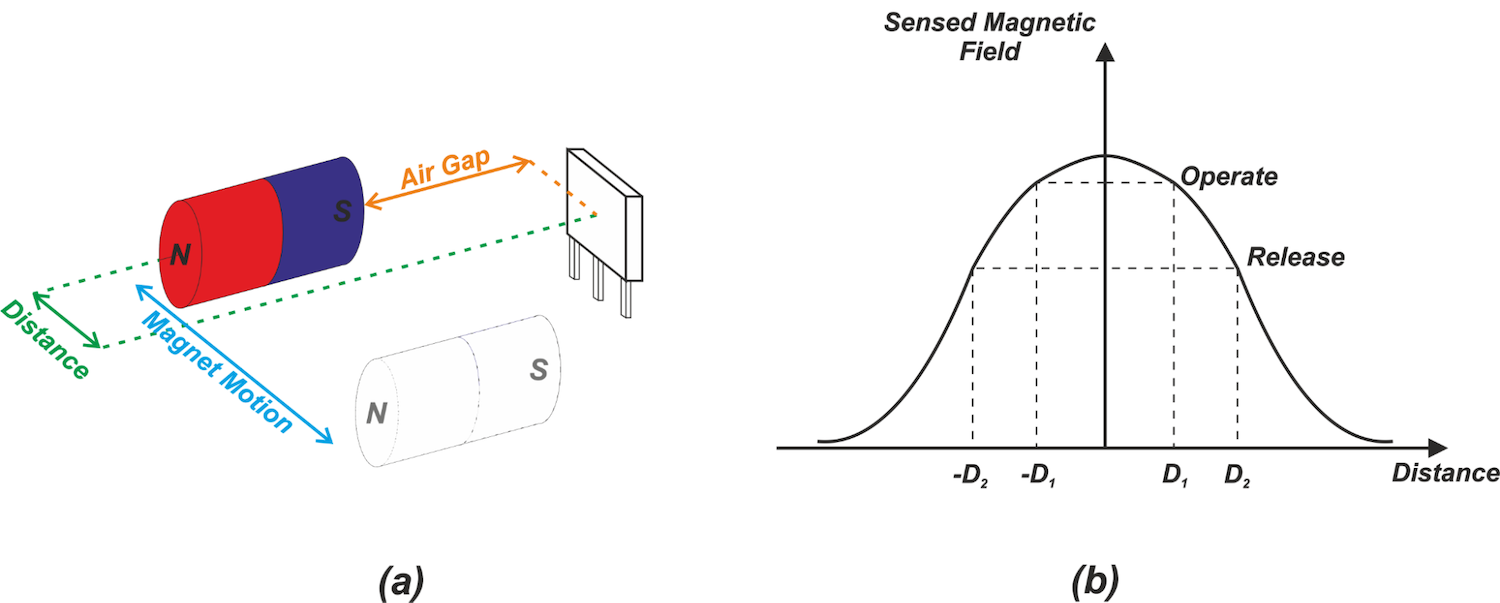
Figura 3
O pólo do ímã está a uma distância perpendicular constante (mostrado pelo “entreferro” na figura) conforme ele passa pelo sensor. Na posição central (distância =0), o campo magnético detectado está no seu máximo. Conforme o ímã se afasta do sensor, o campo magnético diminui. Como o campo magnético produzido pelo ímã é simétrico, o mapa de fluxo é simétrico em torno da origem, conforme mostrado na Figura 3 (b).
O valor de pico do mapa de fluxo muda com o valor de "entreferro", conforme mostrado na Figura 4.
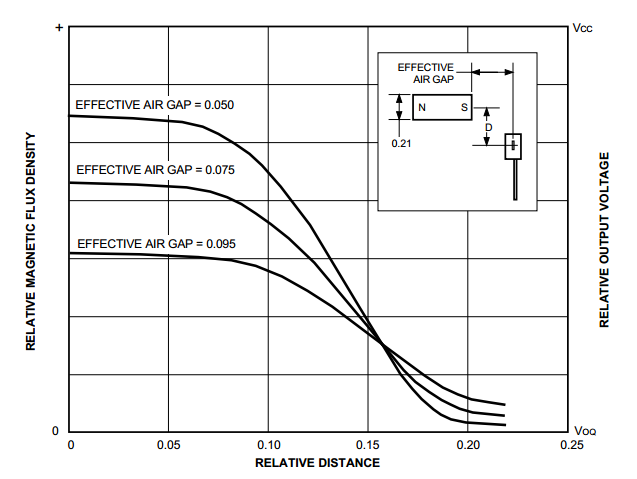
Figura 4. Imagem cortesia de Allegro.
Configuração frontal ou deslizante?
É importante notar que a escolha da configuração magnética depende do tipo de movimento que está sendo detectado. Cada sistema pode ter um conjunto diferente de limitações e recursos mecânicos. Por exemplo, com a configuração frontal, o objeto não pode se mover além do sensor. Esse arranjo é adequado para aplicações em que o objeto que está sendo detectado tem uma posição final definida e estamos interessados em detectar a presença / ausência do objeto neste ponto final.
Por exemplo, a detecção frontal pode ser uma boa escolha para detectar se a tampa de um smartphone está aberta ou fechada. O sensor de deslizamento não tem essa limitação; pode ser usado independentemente de o objeto passar pelo sensor ou não.
Um recurso interessante sobre a configuração deslizante é sua simetria. Uma vez que a curva de Gauss versus distância dessa estrutura é simétrica em torno da origem, os pontos de operação e liberação não dependem de estarmos nos movendo em direção ou longe do sensor. Isso pode ser útil ao detectar o desvio de uma linha central.
Observe que existem outras configurações deslizantes, algumas das quais não fornecem uma resposta simétrica. No próximo artigo, daremos uma olhada em configurações magnéticas mais sofisticadas que são comumente usadas em aplicações de detecção de posição por efeito Hall.
Para ver uma lista completa dos meus artigos, visite esta página.
Detecção de posição de efeito Hall:Linearidade e inclinação de resposta para configurações deslizantes
Sensores de proximidade:Revendo as diferentes tecnologias
Sensor
- Sensor de pressão arterial - Funcionando e suas aplicações
- Sensor de tensão funcionando e suas aplicações
- Sensor RVG - Princípio de funcionamento e suas aplicações
- Sensor Lambda - Funcionando e suas aplicações
- Sensor de imagem funcionando e suas aplicações
- Sensor de cor - Trabalho e aplicações
- Sensor Arduino - Tipos e Aplicações
- Sensor da bússola - Trabalho e aplicações
- Funcionamento e aplicações do sensor de corrente ACS712
- Entendendo o Sensor de Efeito Hall