


Usando um ADC delta-sigma em sistemas multisensores de alta precisão
As configurações de multissensores para medições de óleo, gás e petróleo adquirem continuamente dados sensíveis e térmicos. No entanto, capturar as várias combinações de entidades físicas de temperatura e pressão requer um sistema muito conciso e de alta resolução.
Isso é um desafio para os projetistas, pois os circuitos do sensor de alta resolução necessários se espalham por amplas faixas de temperatura e pressão. Na maioria dos casos, a eletrônica multissensor é muito grande para a aplicação de fábrica e o condicionamento de sinal analógico discreto não é preciso ou robusto o suficiente (Figura 1).
 Figura 1:Uma válvula de segurança de pressão protege os sistemas de tubulação contra sobrepressão. (Fonte:Shutterstock)
Figura 1:Uma válvula de segurança de pressão protege os sistemas de tubulação contra sobrepressão. (Fonte:Shutterstock)
A solução para a eletrônica multissensor está no ADC de alta resolução. A combinação de termopar, detector de temperatura de resistência (RTD), sensores de pressão e conversor analógico-digital (ADC) são atingíveis com um ADC delta-sigma (ΔΣ) multicanal preciso, de alta velocidade e multicanal, onde a especificação principal é o ruído RMS. Isso cria um sistema multissensor robusto e de alta precisão para óleo, gás e eletrônicos de petróleo.
Este artigo discute resumidamente os problemas associados à obtenção de uma interface precisa de temperatura e pressão da célula usando um ADC ΔΣ.
Sensor de pressão
Os dispositivos de medição de pressão são aqueles que requerem excitação elétrica e onde a pressão é a única fonte de energia. Os dispositivos de estilo mecânico incluem foles, diafragmas, bourdons, tubos e manômetros. Com esses dispositivos, uma mudança na pressão inicia uma reação mecânica, como uma mudança na posição do braço mecânico ou no nível do líquido do tubo.
Sensores de pressão eletricamente excitados são sinérgicos com ΔΣ ADCs e microcontroladores. Esses sensores podem ser sensores capacitivos, transformadores diferenciais variáveis lineares (LVDT) ou sensores piezoresistivos. Normalmente, o sensor piezoresistivo é o dispositivo de escolha (Figura 2).

Figura 2:Um sensor de pressão piezoresistivo (a) é normalmente o dispositivo de escolha. O lado alto do modelo de ponte piezoresistiva (b) requer uma tensão ou excitação de corrente. (Fonte:Maxim Integrated)
Na Figura 2a, o lado superior do sensor fabricado é um material resistivo e a parte inferior é um diafragma. O lado alto do modelo de ponte piezoresistiva (Figura 2b) requer uma tensão ou excitação de corrente. A magnitude da excitação afeta a faixa dinâmica da saída do sensor, a diferença máxima entre V OUT + e V OUT - em um sistema de 3,3 V, que geralmente varia de dezenas de milivolts a várias centenas de milivolts. Eletrônicos, que seguem o sensor de ponte usando amplificadores e um ADC, mudam o sinal de saída diferencial para representação digital.
Importância do sensor de temperatura
Existem vários tipos de sensores de temperatura que são apropriados para qualquer aplicação em termos de faixa de temperatura, linearidade, precisão, robustez e facilidade de uso. Os sensores de temperatura nesta aplicação monitoram a temperatura do sensor de pressão para garantir que ocorram leituras de pressão confiáveis. Para realizar esta medição de temperatura, esta aplicação usa um termopar tipo K e RTD (Figura 3).
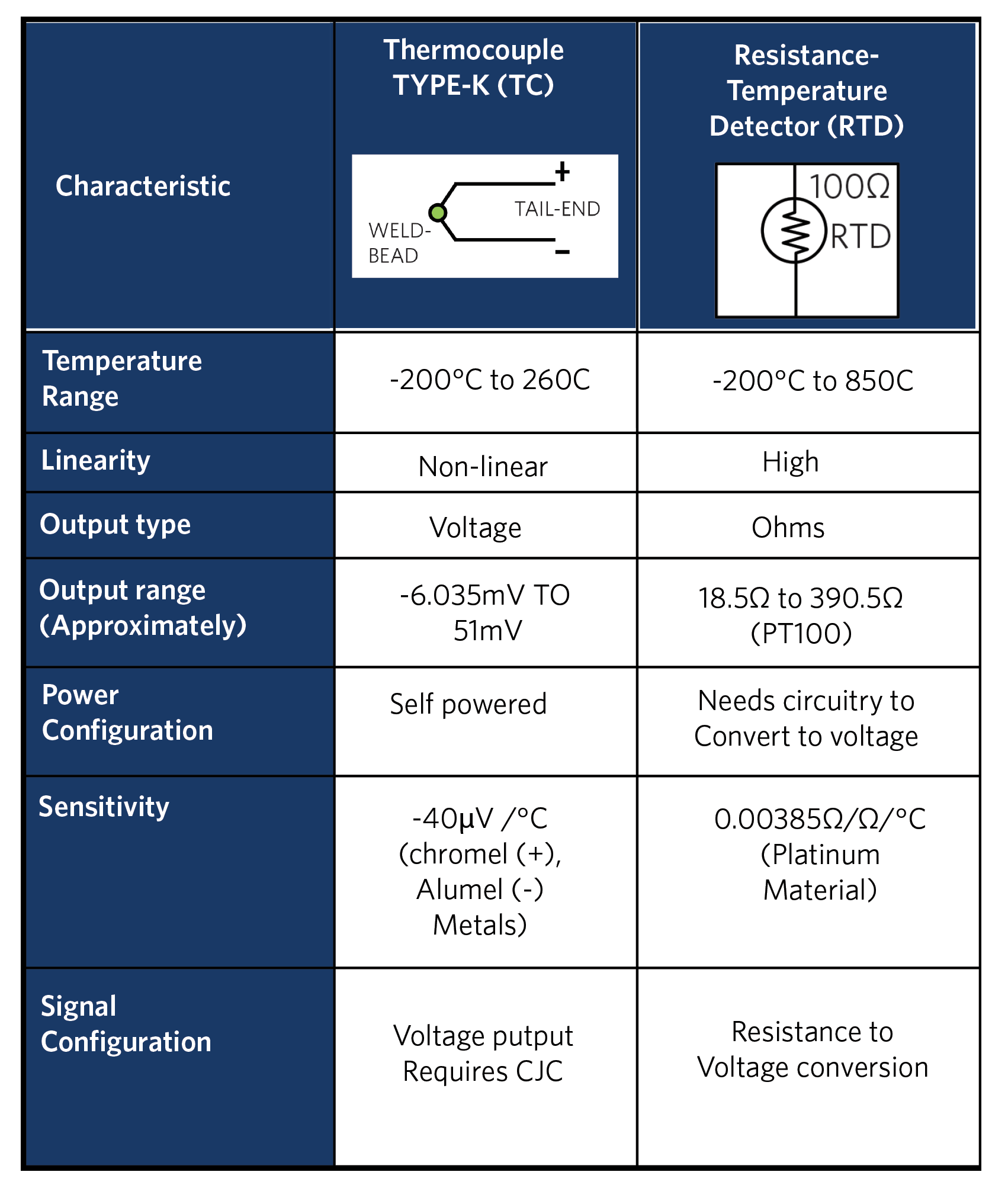 Figura 3:Um termopar TYPE-K de duas derivações requer uma segunda medição de temperatura com o RTD para compensação de junta fria (CJC). (Fonte:Maxim Integrated)
Figura 3:Um termopar TYPE-K de duas derivações requer uma segunda medição de temperatura com o RTD para compensação de junta fria (CJC). (Fonte:Maxim Integrated)
Na Figura 3, o sensor de temperatura termopar robusto pode detectar altas temperaturas de até + 1260 ° C, enquanto o RTD mede a temperatura nas junções termopar / cobre.
ADCs de alta resolução
Com ADCs, há uma troca muito forte entre resolução e velocidade. Dos conversores mais rápidos, o pipeline ADC pode produzir taxas de dados em velocidades de dezenas de giga-amostras por segundo (Gsps), enquanto produz resoluções respeitáveis de até 12 bits.
O ADC intermediário é o conversor de registros de aproximação sucessiva (SAR). Este conversor produz amostras em uma saída mais lenta do que o conversor de pipeline operando em torno de 10 Ksps a 10 Msps e com um aumento na resolução de até 18 bits. O conversor SAR é um bom carro-chefe da indústria, se os tamanhos de bit menos significativo (LSB) da tensão de entrada aceitável estiverem em microvolts (μV). No entanto, se o aplicativo precisa de conversões de tamanhos de LSB na região de nanovolts (nV), a única alternativa viável é um ADC ΔΣ (Figura 4).
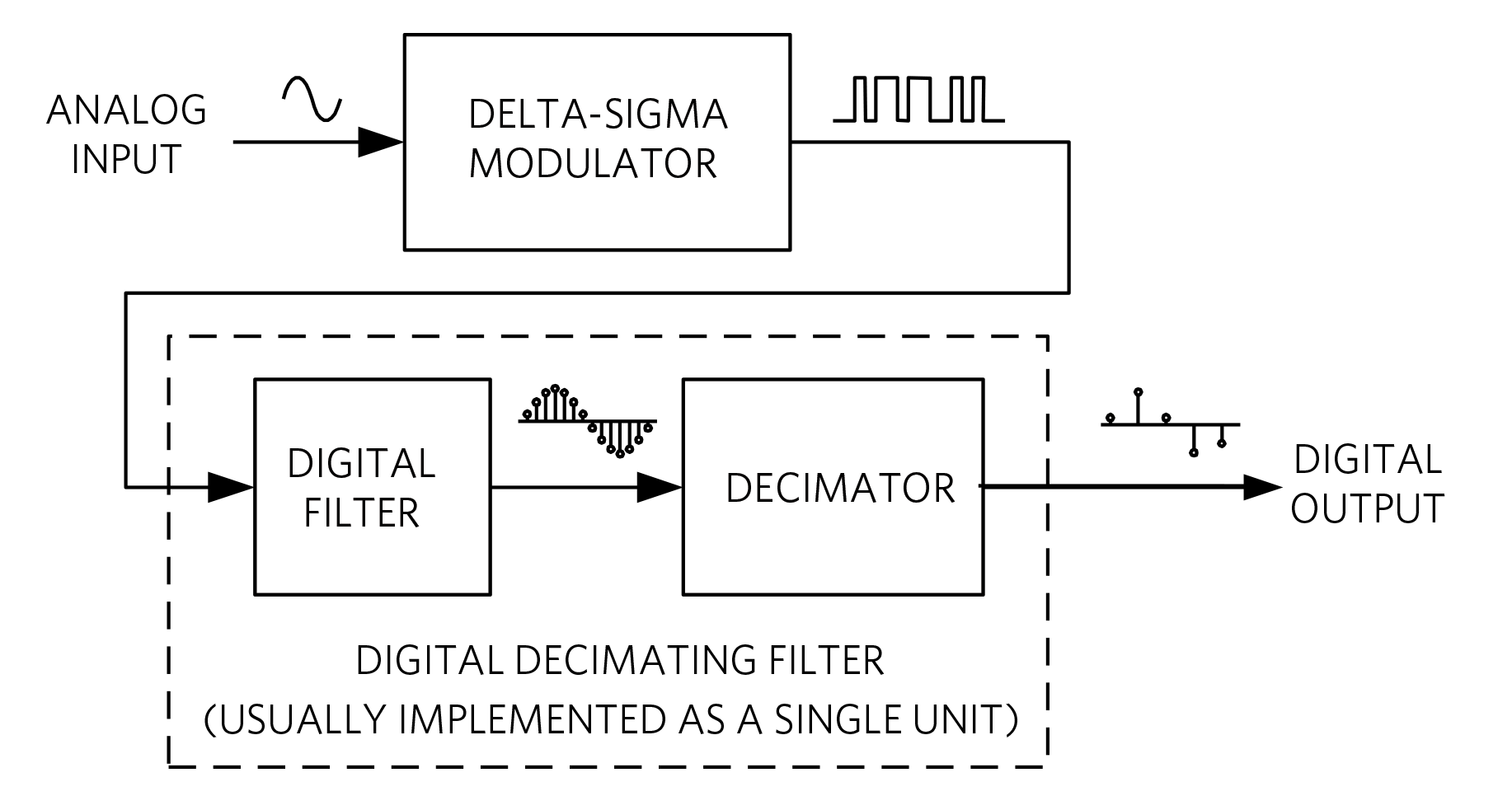 Figura 4:O ADC ΔΣ básico converte a tensão de entrada em um modulador ΔΣ. (Fonte:Maxim Integrated)
Figura 4:O ADC ΔΣ básico converte a tensão de entrada em um modulador ΔΣ. (Fonte:Maxim Integrated)
O ADC ΔΣ na Figura 4 converte a tensão de entrada em um modulador ΔΣ. O modulador cria um trem de pulso em formato de ruído de um bit que representa a tensão de entrada analógica. O conversor então acumula o trem de pulso de um bit e, por meio da sobreamostragem, realiza uma variedade de filtragem digital no sinal. Com o tempo, o filtro rejeita o ruído de alta frequência e produz resultados multibits de até 24 bits. O conversor envia esses resultados para o terminal de saída de um microcontrolador externo.
ΔΣ modulador
O modulador ΔΣ inicia o processo de redução de ruído do ADC. Um exame atento deste modulador revela rapidamente de onde vem o rótulo ΔΣ (Figura 5).
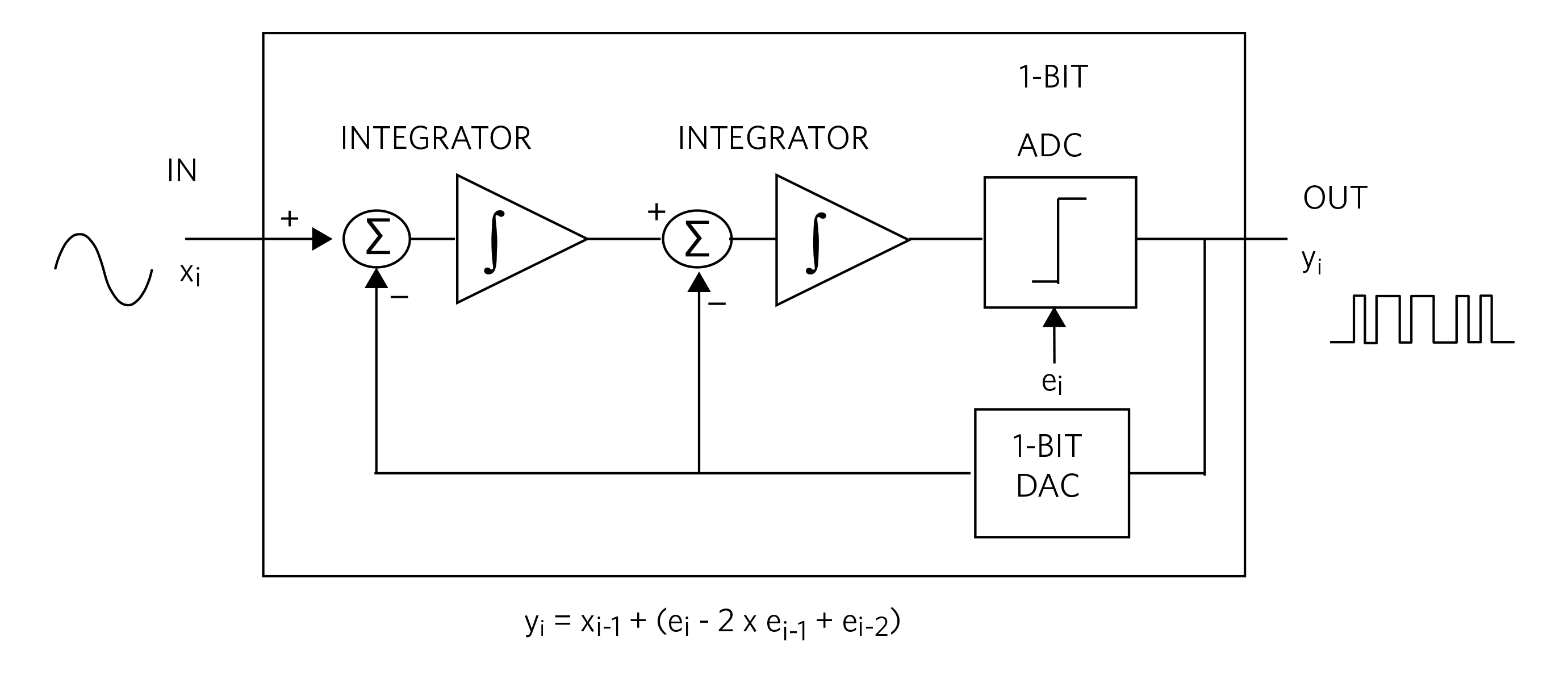 Figura 5:O modulador ΔΣ de segunda ordem compreende um sistema de feedback contendo uma função Δ de front-end seguida por dois integradores (função Σ). (Fonte:Maxim Integrated)
Figura 5:O modulador ΔΣ de segunda ordem compreende um sistema de feedback contendo uma função Δ de front-end seguida por dois integradores (função Σ). (Fonte:Maxim Integrated)
Na Figura 5, após os dois integradores, o sinal é convertido por meio de um ADC de 1 bit com uma taxa de amostragem igual à frequência de amostragem (F S ) e, em seguida, realimenta por meio de um DAC de 1 bit com a mesma taxa de amostragem para as entradas dos dois integradores. Neste sistema, há uma injeção de ruído de quantização (e i ) com o ADC de 1 bit. De acordo com a fórmula na parte inferior da Figura 5, o ruído aparece na saída junto com o ruído das conversões anteriores.
O modulador gera um efeito de modelagem de ruído no acúmulo do sinal na saída do modulador. Este efeito de modelagem de ruído molda o ruído de quantização de conversão de 1 bit em frequências mais altas (Figura 6).
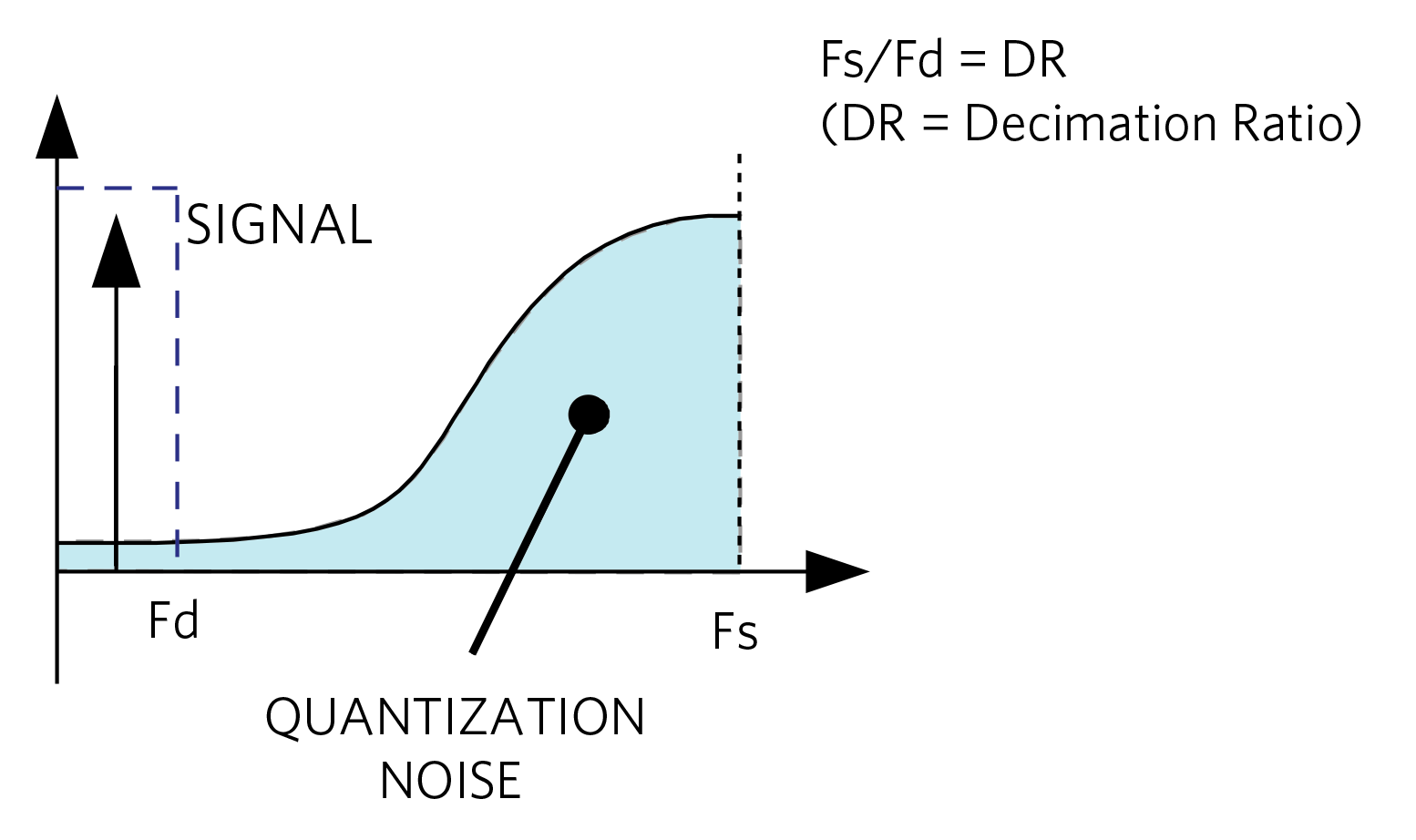 Figura 6:O ruído na saída do modulador cria uma resposta em formato de ruído. (Fonte:Maxim Integrated)
Figura 6:O ruído na saída do modulador cria uma resposta em formato de ruído. (Fonte:Maxim Integrated)
Na Figura 6, a frequência de Nyquist para o sistema é a frequência de amostragem do modulador, F S . A ordem do modulador determina o nível do ruído de quantização sobre a frequência (Figura 7).
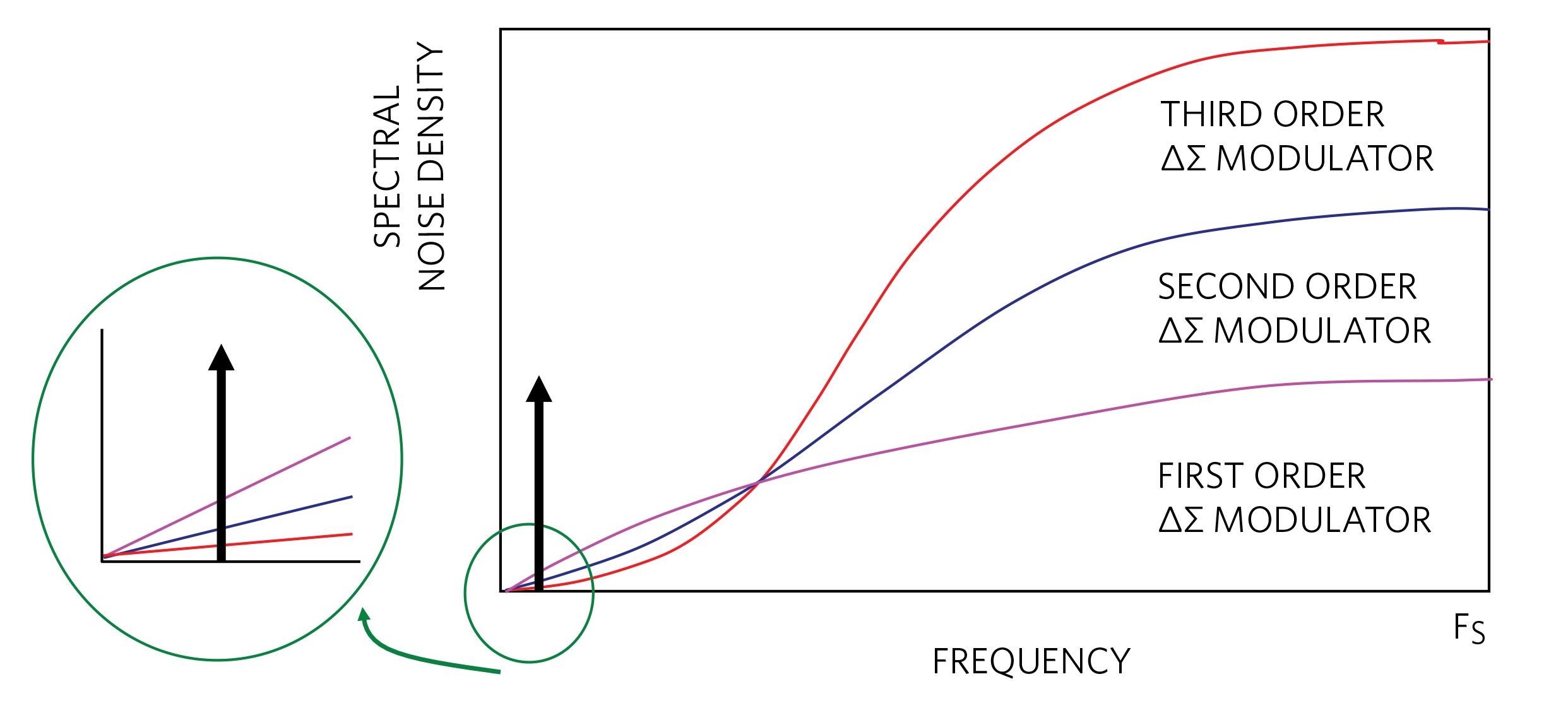
Figura 7:Este gráfico mostra a capacidade de modelagem de ruído dos moduladores de primeira, segunda e terceira ordem. (Fonte:Maxim Integrated)
Na Figura 7, o ruído de quantização dos moduladores de ordem inferior é maior próximo a CC e menor em alta frequência. O ΔΣ ADC coleta ou superaprova o fluxo de saída de 1 bit dos moduladores e exerce a filtragem digital lowpass.
Filtro digital / decimação
Com o núcleo ΔΣ ADC, existem duas ações que ocorrem para reduzir o ruído do sistema. O modulador molda com sucesso seu ruído de quantização para frequências mais altas e o filtro digital / decimação atenua o ruído de alta frequência.
A taxa de dados de saída do ADC, conforme ditado pela seguinte frequência de corte do filtro passa-baixo digital, é F D . A resposta de frequência do filtro digital / decimação (linha tracejada na Figura 4) atenua com sucesso o ruído de frequência mais alta.
Completo ΔΣ foto ADC
Um ADC ΔΣ funcional completo no núcleo requer um modulador ΔΣ e filtros digitais Sinc e de resposta a impulso finito (FIR) (Figura 8).
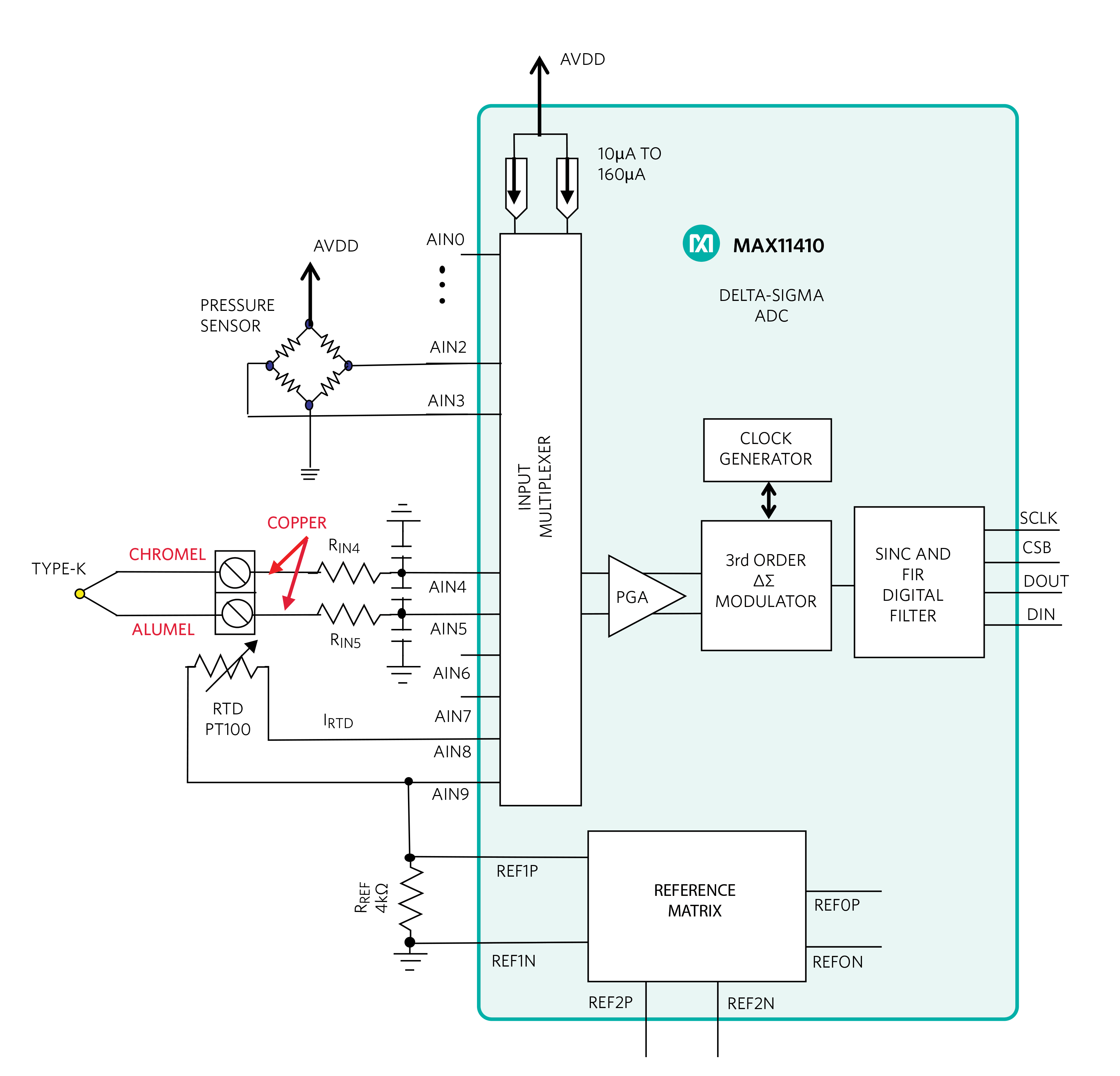
Figura 8:Este diagrama mostra um ΔΣ ADC completo de trabalho com entradas de sensor de pressão e sensor de temperatura. (Fonte:Maxim Integrated)
No diagrama de blocos principal ΔΣ ADC (Figura 4), há um filtro digital / decimação. O ΔΣ ADC real na Figura 8 tem os filtros digitais Sinc e FIR comuns, que completam a imagem de baixo ruído do conversor.
O filtro digital Sinc executa uma função de filtro passa-baixo. Um projeto de filtro de primeira ordem se estabelece em um período de palavra de dados. O filtro Sinc de quarta ordem ou Sinc
4
é estabelecido em quatro períodos de palavras de dados. A forma do filtro no domínio da frequência aparece com quedas sobre a frequência (Figura 9).

Figura 9:Esses gráficos mostram a resposta de frequência de um filtro Sinc de terceira ordem (Sinc
3
) (Fonte:Maxim Integrated)
Na Figura 9, a atenuação mais baixa pode ser programada para corresponder a frequências convenientes, como múltiplos de 50 Hz ou 60 Hz. O dispositivo na Figura 8 implementa um Sinc
4
filtro digital.
As características arredondadas dos filtros digitais Sinc os tornam um dos filtros digitais mais simples de implementar, portanto, são muito úteis em aplicações de sinais mistos. No entanto, existem aplicações em que os cantos mais agudos são preferíveis. O filtro FIR oferece cantos mais nítidos com um benefício adicional de estabilidade. O ΔΣ ADC na Figura 8 tem um filtro de 50 Hz / 60 Hz que fornece mais de 90 dB de rejeição a 50 Hz e 60 Hz a uma taxa de dados de 16 amostras por segundo.
O ΔΣ ADC completo (Figura 8) possui funções auxiliares adicionais, como um multiplexador de entrada, amplificador de ganho programável (PGA), filtro digital complexo, gerador de relógio e matriz de referência. Com um RDT PT100, uma fonte de corrente de 160 μA e um ganho PGA de 128, o MAX11410 ΔΣ ADC apresenta faixa de entrada de 1,234 V a 2,837 V. Com este conversor de 24 bits em um Sinc
4
configuração, o tamanho do LSB da tensão é 0,039 μV RMS . A precisão da temperatura está na faixa de ± 100 ° C e a precisão do RTD é de ~ 4,7 μ ° C / bit.
Este artigo apresentou problemas associados à obtenção de uma interface precisa de temperatura e célula de pressão com um ΔΣ ADC para petróleo, gás e eletrônicos de petróleo. O circuito de aplicação usa pressão, termopar e sensor RTC para obter uma conversão de dispositivo único, onde as especificações principais são ruído, um multiplexador de entrada e custo de lista de materiais (BOM).
>> Este artigo foi publicado originalmente em nosso site irmão, EDN.
Sensor
- Perfil de temperatura Raspberry Pi usando LabVIEW
- Biblioteca Python do sensor de temperatura TMP006 usando Raspberry pi,
- Sensor de temperatura Python e Raspberry Pi
- Leitura de Raspberry Pi BMP085 Temperatura e pressão
- Sistema de controle de dispositivo baseado em temperatura usando LM35
- Monitore a temperatura de sua casa usando o Raspberry Pi
- Sensores analógicos no Raspberry Pi usando um MCP3008
- Blog:Benefícios do uso de um adesivo de temperatura de resfriamento vestível
- Os benefícios do uso de visão robótica para aplicativos de automação
- Usando Cerâmica em Sistemas de Exaustão para Purificar Emissões