


Compreendendo a escolha do comprimento de onda em sistemas LiDAR
É amplamente reconhecido que os sistemas avançados de assistência ao motorista (ADAS) e a direção autônoma (AD) podem ser bem-sucedidos com a detecção eficaz do ambiente ao redor do veículo, alimentando os algoritmos que permitem a navegação autônoma. Dada a confiança absoluta na detecção em situações críticas à vida, várias modalidades de sensor são usadas com os dados sendo combinados para aumentar um ao outro e fornecer redundância. Isso permite que cada tecnologia use seus pontos fortes e forneça uma solução combinada de maneira melhor.
As três modalidades que serão proeminentes para o sensor usado em veículos para ADAS e AD daqui para frente são sensores de imagem, radar e LiDAR (Light Detection and Ranging). Cada um desses sensores tem seus próprios pontos fortes e juntos podem compreender um conjunto completo de sensores que fornece dados para permitir que os algoritmos de percepção autônoma tomem decisões com a fusão de sensores - a capacidade de fornecer cor, intensidade, velocidade e profundidade para cada ponto ou kernel em a cena.
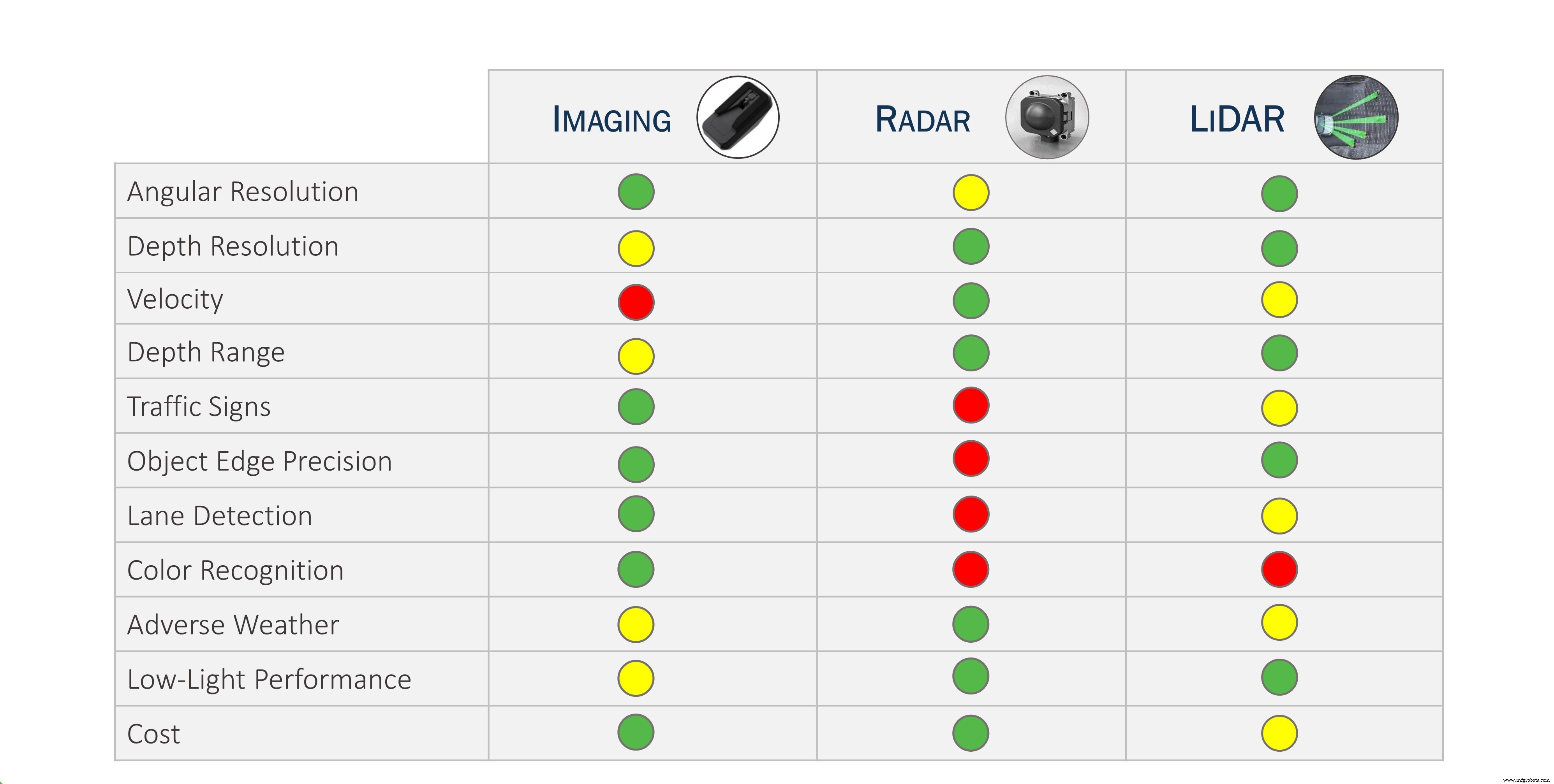
Figura 1:A fusão do sensor aproveita os pontos fortes de cada modalidade para fornecer informações completas sobre os arredores do veículo.
Destas três modalidades principais, o LiDAR é a tecnologia mais nascente a ser comercializada para uso no mercado de massa, embora o conceito de usar luz para medir distâncias remonte a décadas. O mercado de LiDAR automotivo deve apresentar um crescimento espetacular, passando de US $ 39 milhões em 2020 para um projetado de US $ 1,75 bilhão em 2025, de acordo com Yole Développement, impulsionado pela proliferação de sistemas autônomos que exigem o conjunto completo de sensores. A oportunidade é tão grande que existem mais de 100 empresas trabalhando na tecnologia LiDAR, com investimentos cumulativos nessas empresas excedendo US $ 1,5 bilhão em 2020 - e isso foi antes do dilúvio de ofertas públicas iniciais impulsionadas pelo SPAC por mais de um punhado de Empresas LiDAR que começaram no final de 2020. Mas quando há tantas empresas trabalhando em uma única tecnologia - algumas das quais são fundamentalmente diferentes, como o comprimento de onda da luz sendo usado (exemplos proeminentes sendo 905 nm e 1550 nm) - é inevitável que haja ser uma tecnologia vencedora e de consolidação, como se viu repetidamente, seja Ethernet para rede ou VHS para vídeo.
Quando olhamos para os usuários da tecnologia LiDAR - os fabricantes de veículos automotivos, junto com as empresas que projetam e constroem veículos robóticos autônomos para o transporte de pessoas e mercadorias - a coisa mais importante em suas mentes são seus requisitos. Em última análise, essas empresas desejam que os fornecedores lhes forneçam sensores LiDAR de baixo custo e alto grau de confiabilidade, ao mesmo tempo que atendem às especificações de desempenho de alcance e detecção de objetos de baixa refletividade. Embora todos os engenheiros tenham pontos de vista fortes, essas empresas provavelmente serão agnósticas quanto à implementação da tecnologia se o fornecedor puder atender aos requisitos de desempenho e confiabilidade com o custo certo. E isso leva ao debate fundamental que este artigo pretende ajudar a resolver:Qual comprimento de onda prevalecerá para aplicações LiDAR automotivas?
Visão geral do LiDAR
Para começar a responder a esta questão, é necessário compreender a anatomia de um sistema LiDAR, do qual existem diferentes arquiteturas. Coerente LiDAR, um tipo conhecido como onda contínua modulada em frequência (FMCW), mistura um sinal de laser transmitido com luz refletida para calcular o alcance e a velocidade dos objetos. FMCW oferece algumas vantagens, mas permanece relativamente incomum quando comparado com a abordagem LiDAR mais comum, o tempo de vôo direto (dToF) LiDAR. Esta implementação mede a distância a um objeto cronometrando quanto tempo leva para um pulso muito curto de luz enviado de uma fonte de iluminação ser refletido em um objeto e retornado para ser detectado pelo sensor. Ele usa a velocidade da luz para diretamente calcule a distância até o objeto usando a fórmula matemática simples que relaciona o tempo, a velocidade e a distância. Um sistema dToF LiDAR típico tem seis funções de hardware principais, embora a escolha do comprimento de onda tenha impacto sobre as funções de transmissão e recepção.
clique para imagem em tamanho real
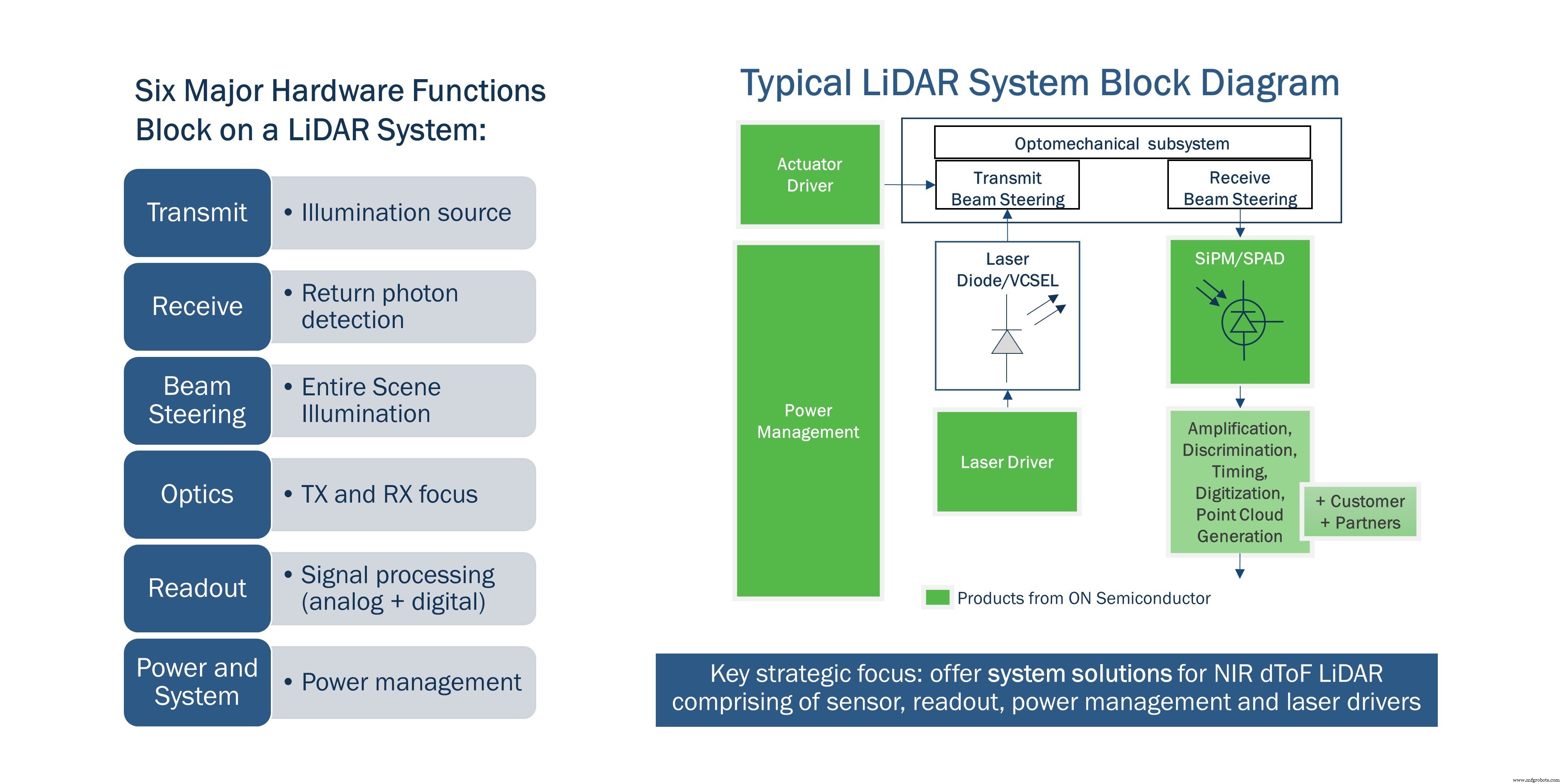
Figura 2:Um diagrama de blocos de um sistema dToF típico com partes verdes representando algumas áreas de foco de produtos ON Semiconductor.
A Tabela 1 mostra uma lista dos vários fabricantes de LiDAR que variam de Tier-1 automotivo conhecido a startups em todas as regiões do globo. Com base em relatórios de mercado e informações públicas, a grande maioria dessas empresas opera seus LiDARs em comprimentos de onda do infravermelho próximo (NIR), em oposição aos comprimentos de onda do infravermelho de onda curta (SWIR). Além disso, enquanto os fornecedores focados em SWIR que trabalham em FMCW são restritos a esses comprimentos de onda, a maioria daqueles com uma implementação de tempo de voo direto tem um caminho para fazer um sistema com comprimentos de onda NIR, se eles escolherem, enquanto são capazes de alavancar um grande parte de seu IP existente em torno de funções como direcionamento do feixe e processamento de sinal.
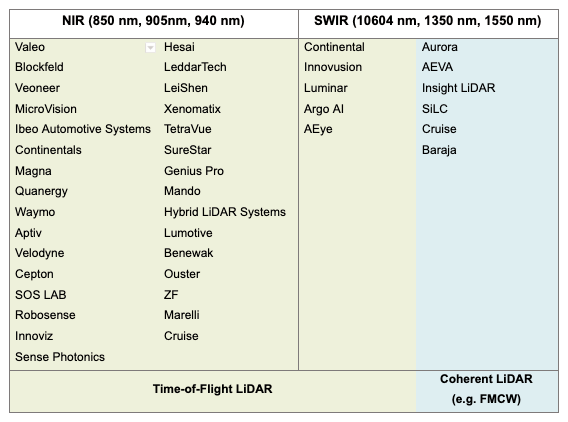
Tabela 1:Lista de fabricantes de LiDAR que operam em comprimentos de onda NIR e SWIR. Não é uma lista abrangente. (Fonte da imagem:Yole, IHS Markit e divulgações públicas)
Dado que a maioria, mas não todos, desses fabricantes escolheram os comprimentos de onda NIR, como eles chegaram a essa decisão e quais são as implicações devem ser considerados. No centro da discussão está um pouco da física básica relacionada às propriedades da luz e dos materiais semicondutores que constituem os componentes usados no LiDAR.
Os fótons disparados pelo laser em um sistema LiDAR, que devem ser refletidos em objetos e recebidos pelo detector, precisam competir com os fótons ambientais vindos do sol. Olhando o espectro da radiação solar e levando em consideração a absorção atmosférica, ocorrem “quedas” na irradiância em determinados comprimentos de onda que reduziriam a quantidade de fótons existentes como ruído para o sistema. Em 905 nm, há cerca de 3x maior a quantidade de irradiância solar do que em 1550 nm, o que significa que um sistema NIR precisa lidar com mais ruído que pode interferir no sensor. Mas este é apenas um dos fatores a levar em consideração ao escolher um comprimento de onda para um sistema LiDAR.
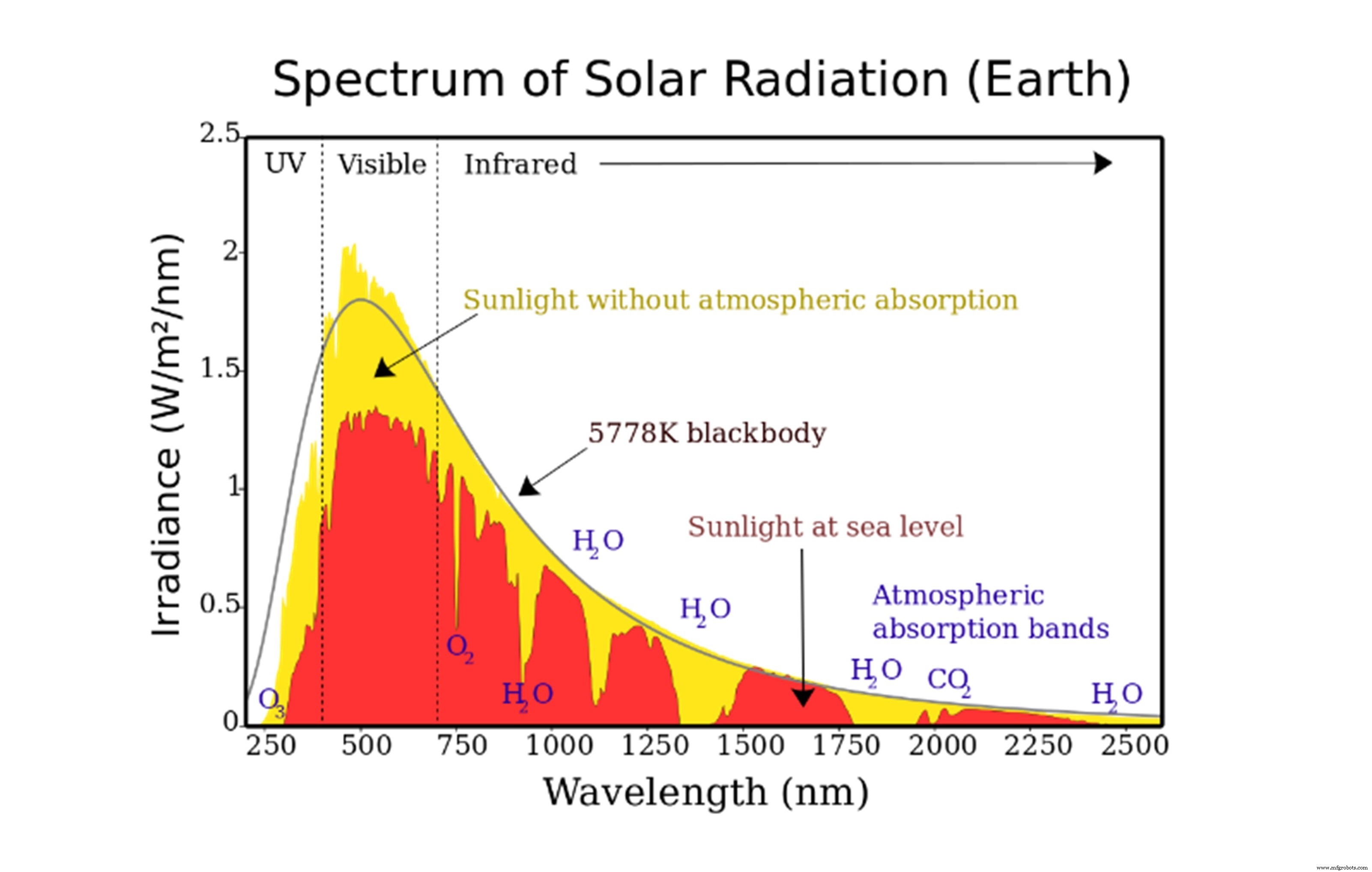
Figura 3:A absorção atmosférica de luz resulta em picos claros.
Sensores
Os componentes responsáveis por detectar os fótons no sistema LiDAR são diferentes tipos de fotodetectores, por isso é importante explicar porque eles podem ser constituídos por diferentes materiais semicondutores dependendo do comprimento de onda a ser detectado. Em um semicondutor, um gap separa as bandas de valência e de condução. Os fótons fornecem a energia para ajudar os elétrons a superar essa lacuna de banda e tornar o semicondutor condutor, criando assim uma fotocorrente. A energia de cada fóton está relacionada ao seu comprimento de onda e a lacuna de banda de um semicondutor está relacionada à sua sensibilidade - é por isso que diferentes materiais semicondutores são necessários, dependendo do comprimento de onda da luz que deve ser detectada. O silício, que é o semicondutor mais comum e mais barato de se fabricar, responde a comprimentos de onda visíveis e NIR de até cerca de 1000 nm. Para detectar comprimentos de onda além do intervalo SWIR, a liga de semicondutores do grupo III / V mais exóticos pode ser feita para fazer materiais como InGaAs capazes de detectar esses comprimentos de onda de luz, de 1000nm a 2500nm.
Os primeiros LiDARs usavam fotodiodos PIN como sensores. Os fotodiodos PIN não têm ganho inerente e, como resultado, não são capazes de detectar sinais fracos facilmente. Fotodiodos de avalanche (APDs) são o tipo mais proeminente de sensor usado no LiDAR hoje e fornecem uma quantidade moderada de ganho. No entanto, os APDs também precisam operar em modo linear como fotodiodos PIN para integrar o sinal das chegadas de fótons e também sofrem com a uniformidade de parte para parte fraca, embora exijam tensões de polarização muito altas. Os mais novos tipos de sensores que estão cada vez mais sendo usados em LiDARs são construídos em diodos de avalanche de fóton único (SPADs), que têm um ganho muito grande e são capazes de produzir uma saída de corrente mensurável de cada fóton detectado. Fotomultiplicadores de silício (SiPMs) são matrizes de SPADs baseados em silício que vêm com a vantagem adicional de serem capazes de distinguir fótons únicos de fótons múltiplos observando a amplitude do sinal gerado.
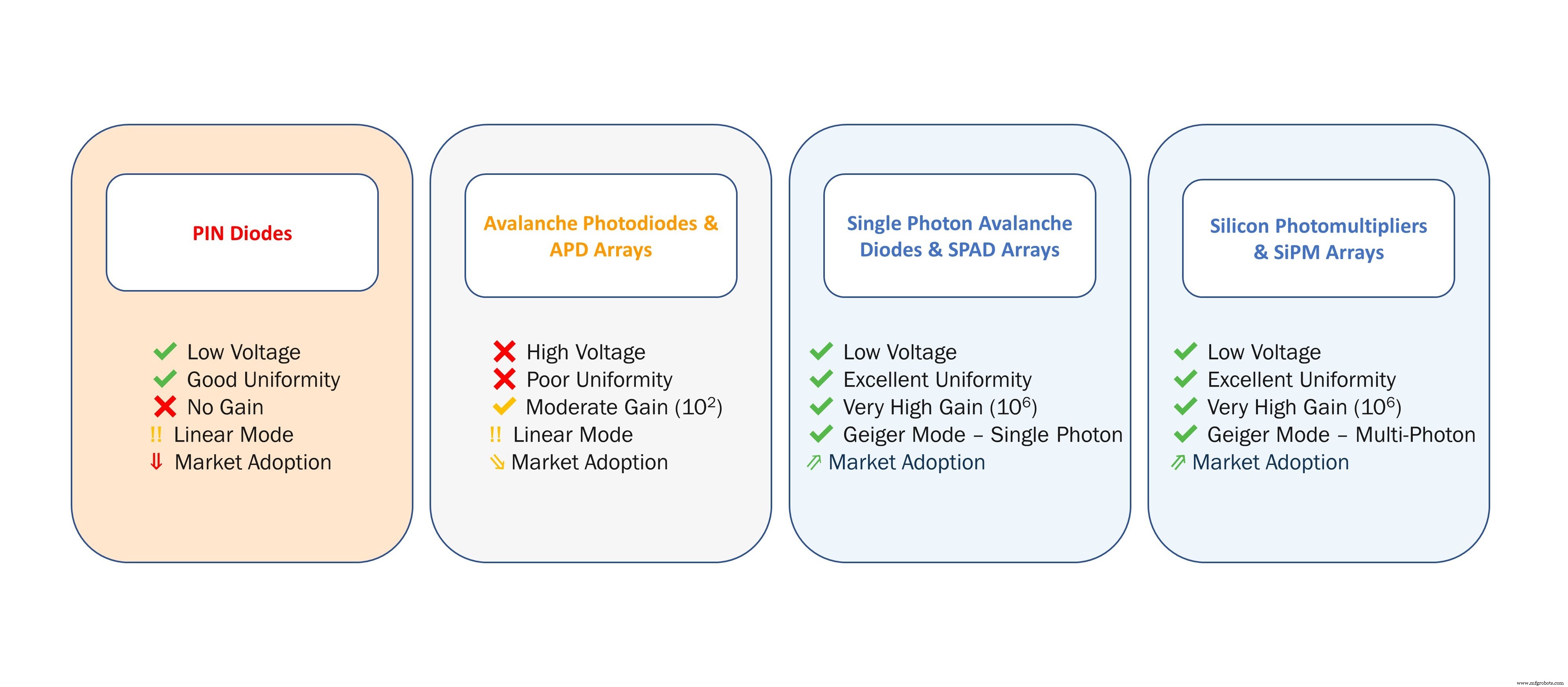
Figura 4:Diferentes tipos de fotodetectores usados para detectar sinais em um LiDAR
Voltando à relevância do tópico de comprimentos de onda, todos esses tipos de fotodetectores podem ser construídos em silício (para detecção NIR) ou semicondutores III / V (para detecção SWIR). Por outro lado, a capacidade de fabricação e o custo são fundamentais para a viabilidade da tecnologia, e as fundições de silício CMOS permitem a fabricação de alto volume e baixo custo de tais sensores. Esta é a principal razão pela qual os SiPMs estão sendo cada vez mais adotados para LiDAR, além de permitir um desempenho superior. Embora existam APDs e SPADs para SWIR, é difícil integrá-los com a lógica de leitura devido ao fato de que os processos não são baseados em silício. Por último, matrizes e fotomultiplicadores SPAD baseados em III / V (análogos aos SiPMs) para SWIR ainda não foram comercializados, portanto a disponibilidade do ecossistema favorece os comprimentos de onda NIR.
Lasers
A geração de fótons envolve um processo totalmente diferente. Uma junção p-n semicondutora como meio de ganho pode ser usada para fazer um laser; isso é feito por meio do bombeamento de uma corrente através da junção, causando a emissão ressonante de fótons conforme os átomos vão para bandas de energia mais baixas, resultando em uma saída de feixe de laser coerente. Os lasers semicondutores são baseados em materiais de gap direto como GaAs e InP, que são eficientes para a geração de fótons que acontece quando os átomos vão para uma banda de energia mais baixa, ao contrário de materiais de gap indireto, como o silício.
Existem dois tipos principais de lasers usados no LiDAR:laser de emissão de borda (EEL) e laser de emissão de superfície de cavidade vertical (VCSEL). Os EELs são mais amplamente usados hoje, devido ao seu custo mais baixo e maior eficiência de produção do que os VCSELs. Eles são mais difíceis de empacotar e incorporar em matrizes e também sofrem com uma mudança de comprimento de onda através da temperatura que faz com que os detectores tenham que procurar uma banda mais ampla de comprimentos de onda de fótons, permitindo que mais fótons ambientais como ruído também sejam detectados. Apesar do custo mais alto e da eficiência energética mais baixa, a tecnologia VCSEL mais recente tem a vantagem de ser um empacotamento fácil e eficiente, uma vez que o feixe é gerado de cima. A adoção do VCSEL pelo mercado está aumentando, pois seus custos continuarão a diminuir significativamente e a eficiência de energia irá melhorar. EELs e VCSELs existem para geração de comprimento de onda NIR e SWIR, com uma diferença fundamental - comprimentos de onda NIR podem ser gerados com GaAs, enquanto comprimentos de onda SWIR requerem o uso de InGaAsP. Os lasers GaAs são capazes de usar fundições de wafer maiores, levando a um custo mais baixo, novamente apontando para uma vantagem para o ecossistema dos fabricantes de NIR LiDAR tanto do ponto de vista de custo quanto de segurança da cadeia de suprimentos.
clique para imagem em tamanho real
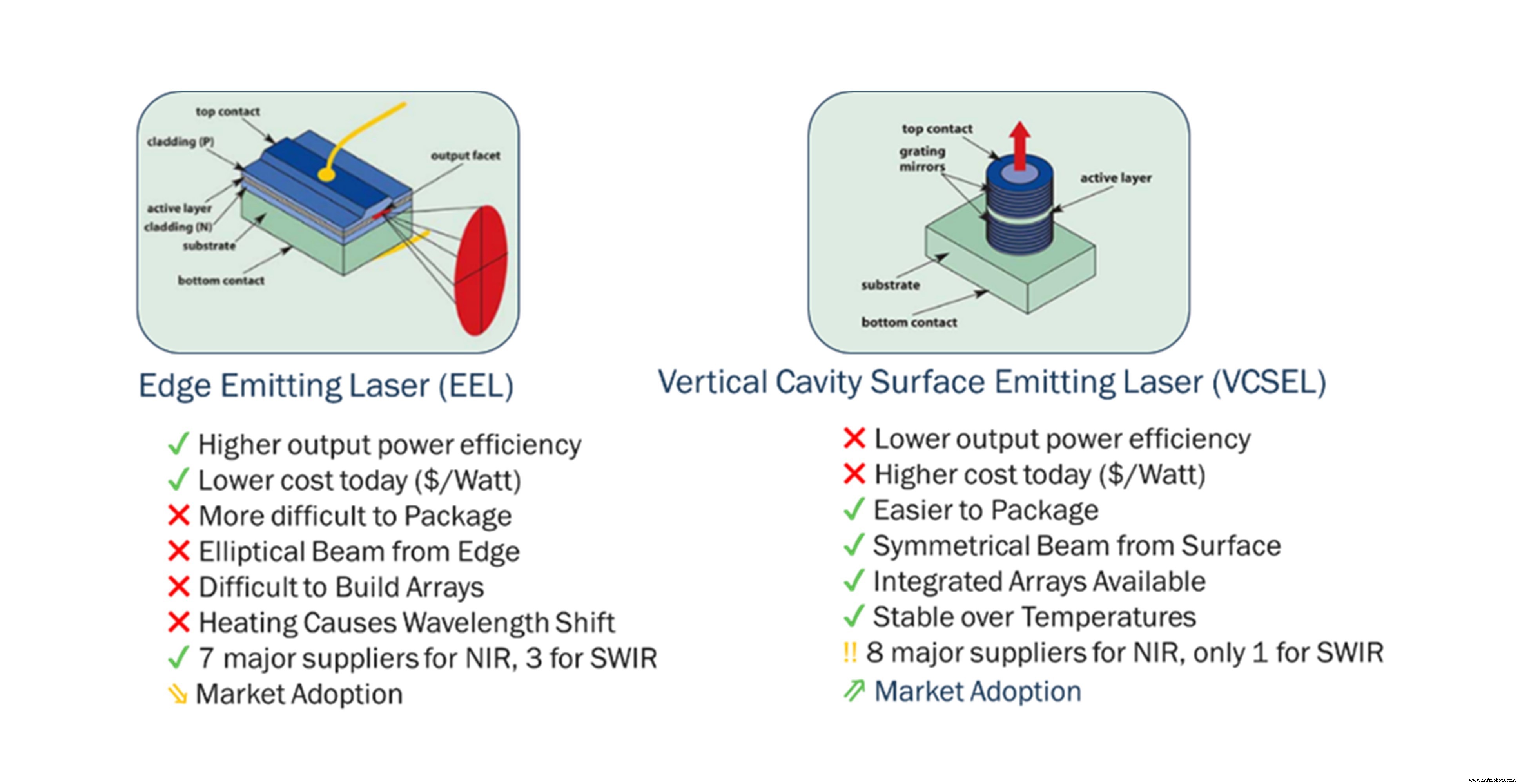
Figura 5:Diferentes tipos de lasers usados em um LiDAR.
Poder do laser e segurança ocular
Ao falar sobre o debate do comprimento de onda, é imperativo considerar as implicações de um sistema LiDAR para a segurança dos olhos. O conceito de dToF LiDAR envolve o uso de pulsos de laser curtos com alta potência de pico em um determinado ângulo de visão para serem emitidos para a cena. Um pedestre parado no caminho de emissão de um LiDAR precisa ter certeza de que seus olhos não serão danificados por um laser disparado em sua direção, e a IEC-60825 é uma especificação que determina a quantidade de exposição máxima permitida entre os diferentes comprimentos de onda de luz. Enquanto a luz NIR, semelhante à luz visível, é capaz de passar pela córnea e atingir a retina no olho humano, a luz SWIR é absorvida principalmente pela córnea e, como resultado, pode ser exposta em níveis mais elevados.
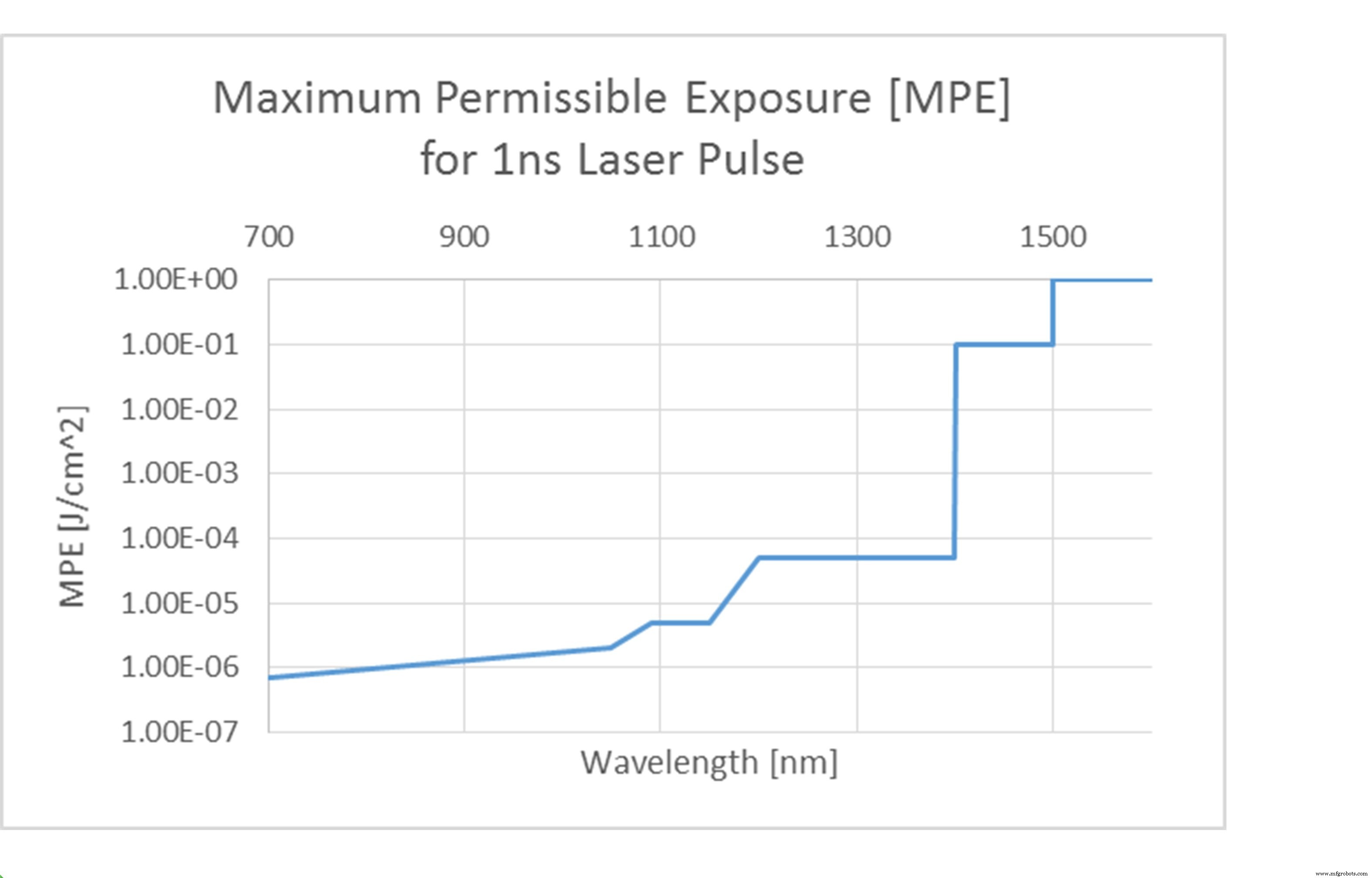
Figura 6:Especificação IEC-60825 para exposição a laser segura para os olhos.
Ser capaz de produzir uma potência de laser de várias ordens de magnitude maior é uma vantagem para um sistema baseado em 1550 nm de uma perspectiva de desempenho, pois permite que mais fótons sejam enviados e, assim, retornem para serem detectados. No entanto, os maiores poderes do laser também vêm com uma compensação térmica. Deve-se notar que o projeto adequado para proteger os olhos deve ser feito independentemente do comprimento de onda, levando-se em consideração a energia por pulso e o tamanho da abertura do laser. Com um LiDAR baseado em 905 nm, a potência de pico pode ser aumentada por qualquer um desses fatores, conforme mostrado na Figura 7.
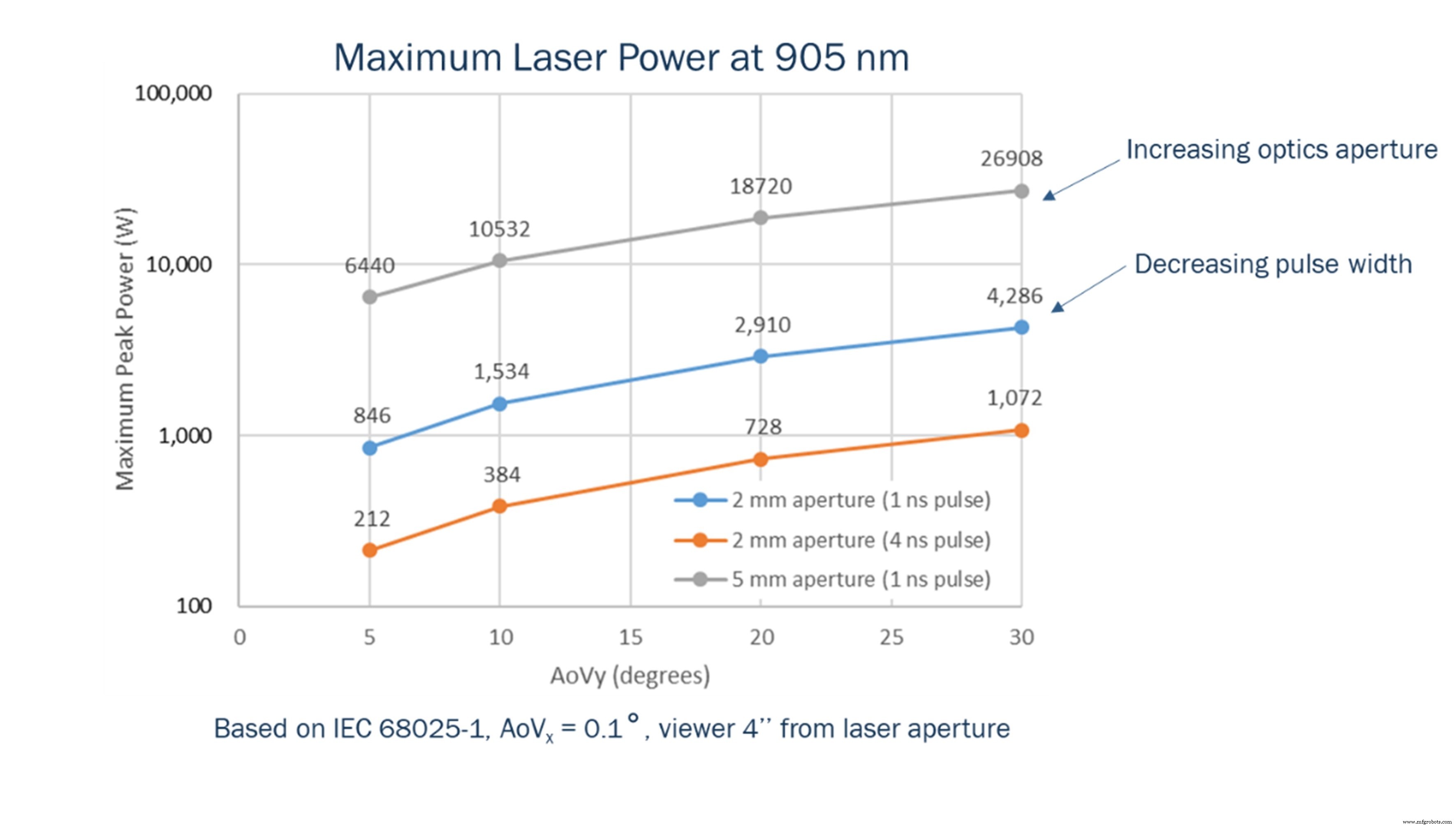
Figura 7:Projeto de laser seguro para os olhos para um NIR LiDAR, considerando diferentes óticas e parâmetros de laser.
Comparação de sistemas NIR e SWIR LiDAR
O foco acima na quantidade de potência do laser capaz de ser produzida nos traz de volta aos sensores que estão sendo usados. Um sensor de alto desempenho que é capaz de detectar sinais mais fracos irá claramente beneficiar o sistema de várias maneiras - sendo capaz de atingir um alcance maior ou ser capaz de usar menos potência do laser para atingir o mesmo alcance. ON Semiconductor desenvolveu uma série de SiPMs para NIR LiDAR conduzindo a eficiência de detecção de fótons (PDE) - um parâmetro chave indicando sensibilidade - para um líder de mercado de 18% com seus mais recentes sensores RDM-Series.
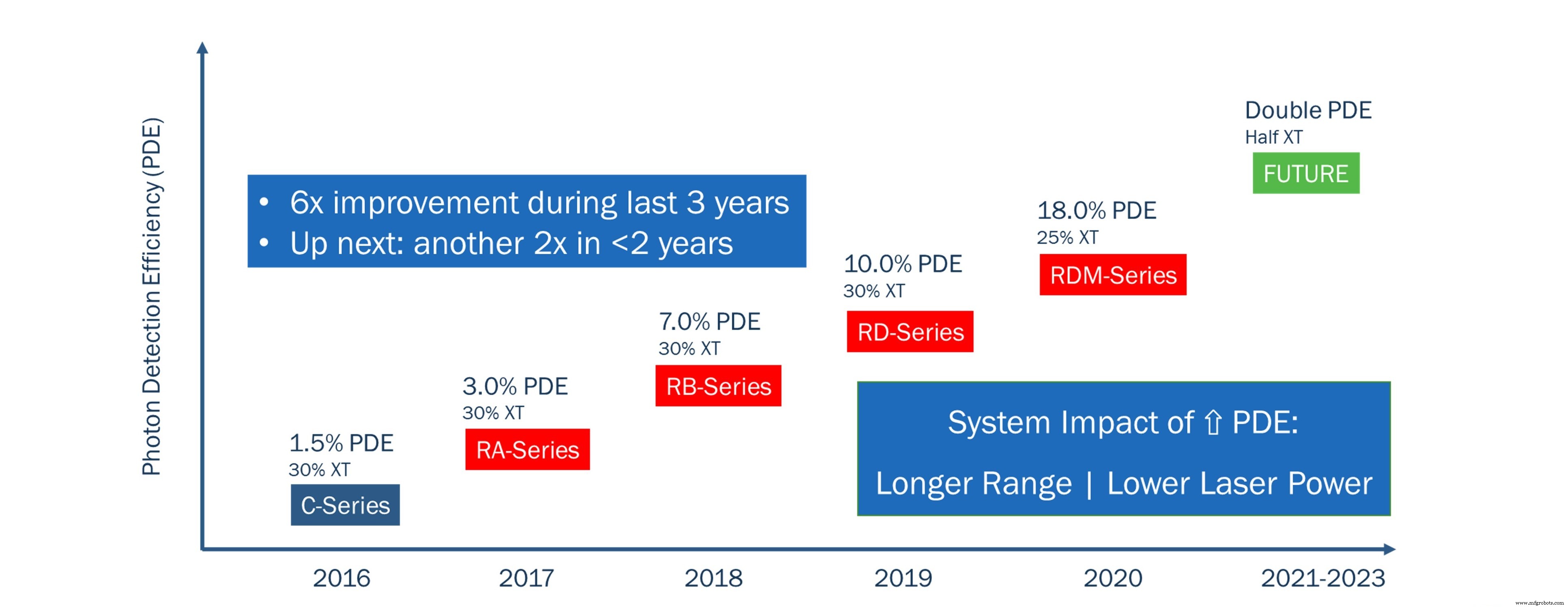
Figura 8:Roteiro do processo de ON Semiconductor SiPMs.
Para comparar o desempenho de um NIR dToF LiDAR com um SWIR dToF LiDAR, realizamos a modelagem do sistema para arquiteturas LiDAR idênticas e condições ambientais com diferentes parâmetros para os lasers e sensores. A arquitetura LiDAR é um sistema coaxial com um conjunto de detectores de 16 canais e um mecanismo de varredura para espalhar pelo campo de visão, conforme mostrado na Figura 10. Este modelo de sistema foi validado com hardware e nos permite estimar com precisão o desempenho do LiDAR sistemas.
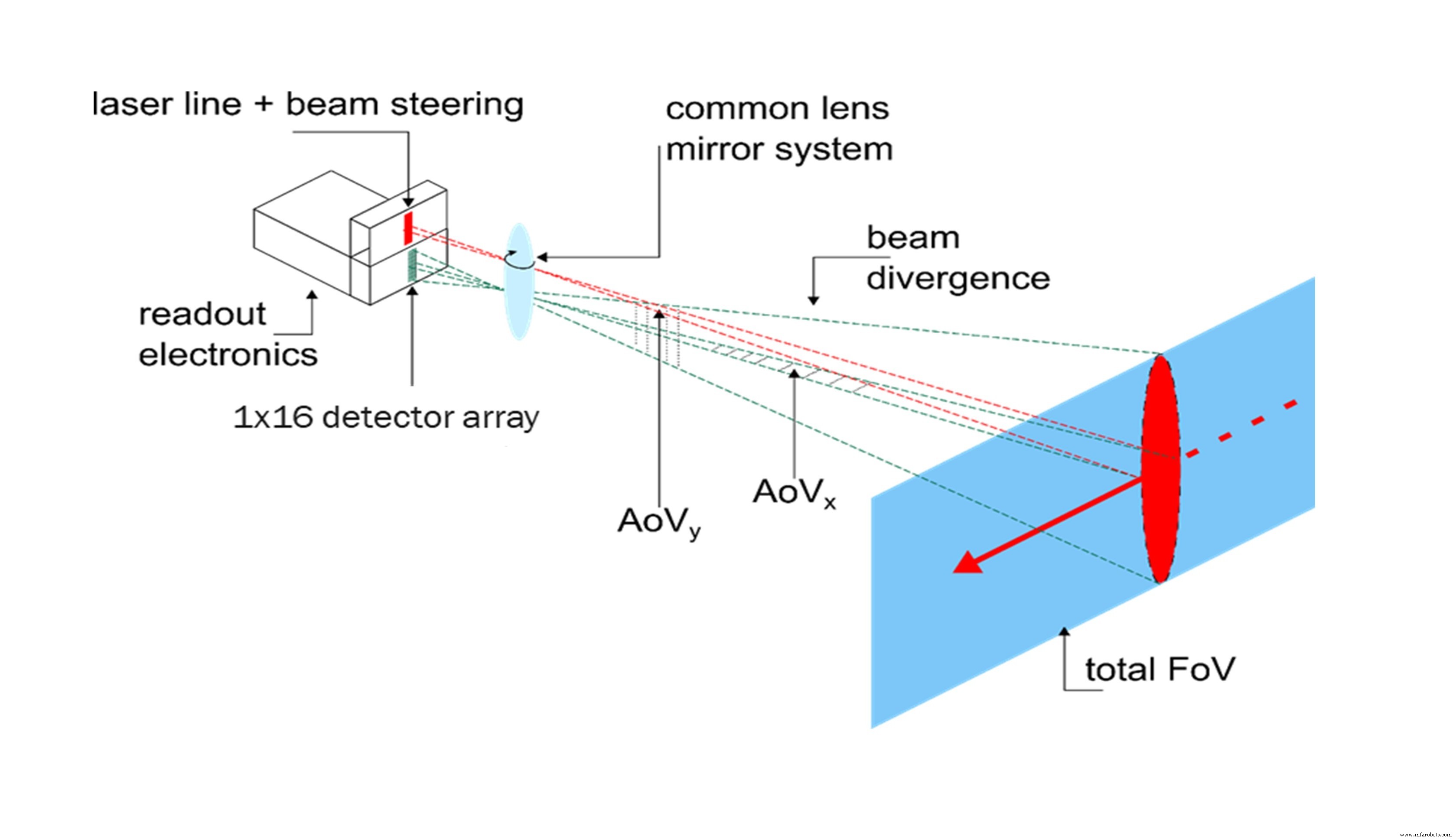
Figura 9:Modelo de sistema para um sensor dToF LiDAR.
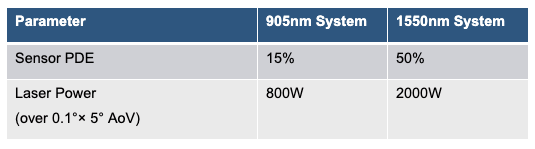
Tabela 2:Sensor LiDAR e parâmetros de laser para simulação de modelo de sistema NIR e SWIR.
O sistema de 1550nm usa uma quantidade maior de potência do laser, bem como um sensor PDE mais alto devido ao seu uso de ligas InGaAs de alto PDE, o que deve render um desempenho de melhor alcance em nossa simulação de sistema. Usando parâmetros de nível de sistema de luz ambiente de 100klux filtrada por um passa-banda de 50nm na lente do sensor (centralizado em torno de 905nm e 1550nm respectivamente), um ângulo de visão de 0,1 ° x 5 ° varrido mais de 80 ° horizontalmente a 30fps, uma taxa de repetição de laser de 500kHz com Largura de pulso de 1ns e um diâmetro de lente de 22 mm, os resultados são mostrados na Figura 10.
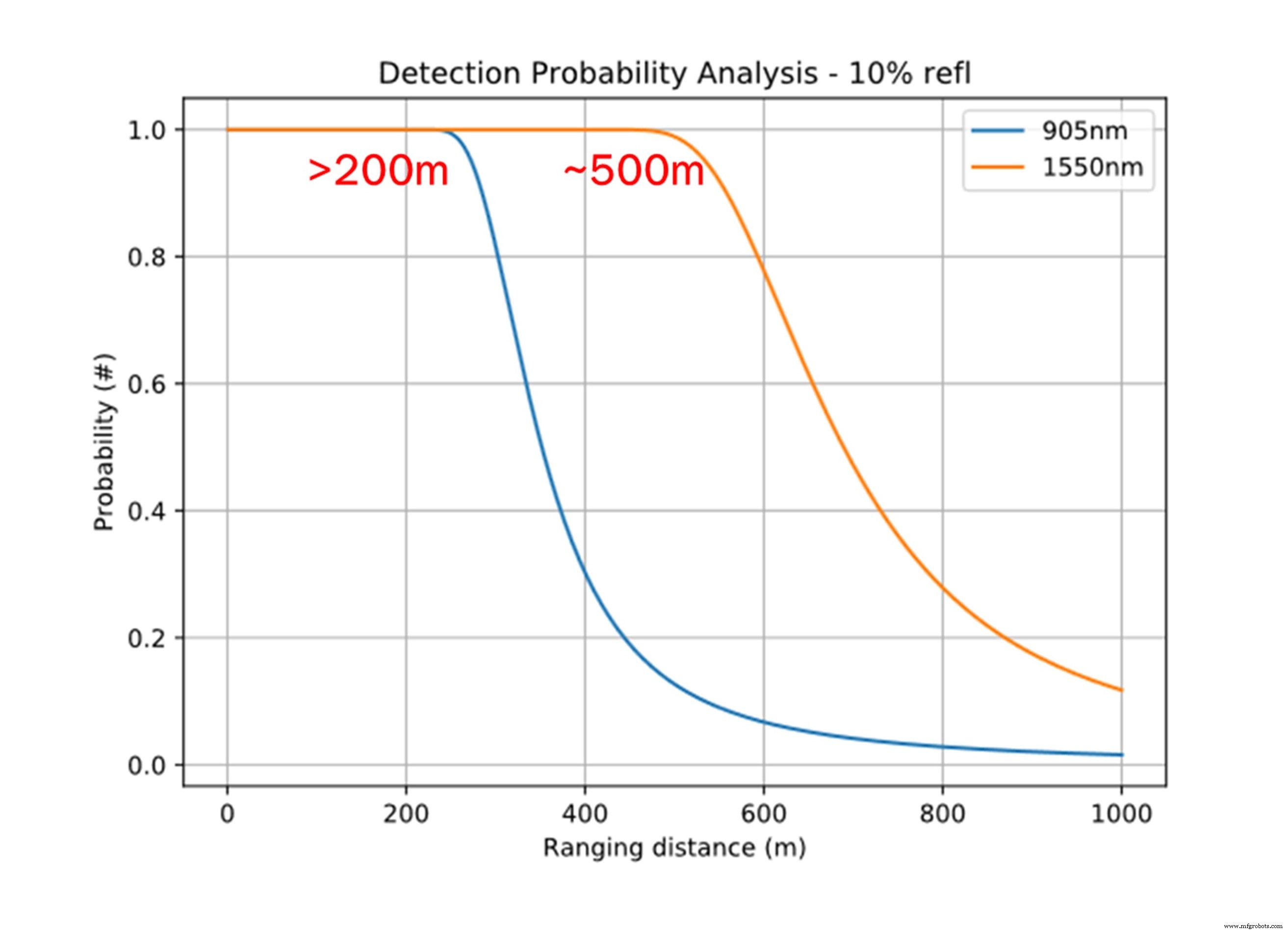
Figura 10:Resultados da simulação para sistemas LiDAR semelhantes baseados em 905 nm e 1550 nm.
Como esperado, o sistema de 1550nm é capaz de variar ainda mais para um objeto de baixa refletividade, indo até 500m com 99% de probabilidade de variação. No entanto, o sistema baseado em 905 nm ainda atinge bem mais de 200 m de alcance, mostrando que ambos os tipos de sistemas podem atender aos requisitos automotivos LiDAR de longo alcance em condições ambientais típicas. Quando condições ambientais ruins, como chuva ou neblina, são introduzidas, as propriedades de absorção de água da luz SWIR fazem com que seu desempenho se degrade mais rapidamente do que um sistema baseado em NIR, que é outro fator a ser levado em consideração.
Considerações de custo
Tendo examinado extensivamente a tecnologia por trás dos sistemas LiDAR, bem como as implicações do uso de diferentes comprimentos de onda, agora voltamos ao fator de considerações de custo. Explicamos anteriormente que os sensores usados para LiDARs baseados em NIR vêm de processos de fundição de silício CMOS nativos, que permitem o menor custo possível para semicondutores. Além disso, eles também permitem a integração da lógica de leitura CMOS com o sensor em um chip por meio do uso da tecnologia de matriz empilhada, que já está disponível nas fundições hoje, colapsando ainda mais a cadeia de sinal e reduzindo custos. Por outro lado, os sensores SWIR usam fundições de semicondutores III / V como InGaAs que são de custo mais alto e nova tecnologia híbrida Ge-Si - que pode permitir sensores SWIR de custo mais baixo - tornando a integração com a lógica de leitura mais fácil, mas ainda são estimados em mais de 5 vezes mais caros do que o silício CMOS tradicional, mesmo depois de atingir a maturidade. No lado do laser, a diferença no tamanho do wafer entre os wafers GaAs usados para fazer os chips de laser em sistemas NIR versus os wafers InGaAs usados para fazer os chips de laser em sistemas SWIR novamente leva a uma disparidade de custo, e o fato de que os sistemas NIR têm um caminho para usar VCSELs com uma base de fornecedores muito mais prontamente disponível também permite integração de baixo custo.
A soma dos fatores acima levou a uma análise feita pela IHS Markit (Amsrud, 2019), que mostrou que para o mesmo tipo de componente (o sensor ou laser), o custo de um sistema SWIR seria de 10 a 100 vezes maior do que um sistema NIR. O custo médio do componente combinado para o sensor e laser para um sistema NIR foi estimado entre $ 4 a $ 20 por canal em 2019 e diminuindo para $ 2 a $ 10 em 2025. Em contraste, o custo médio equivalente do componente para um sistema SWIR foi estimado em ser $ 275 por canal em 2019 e diminuindo para $ 155 por canal em 2025. Essa é uma tremenda diferença de custo quando se considera o fato de que os sistemas LiDAR contêm vários canais, mesmo usando uma abordagem de varredura 1D, uma vez que uma matriz vertical de canais de ponto único ainda está requeridos.
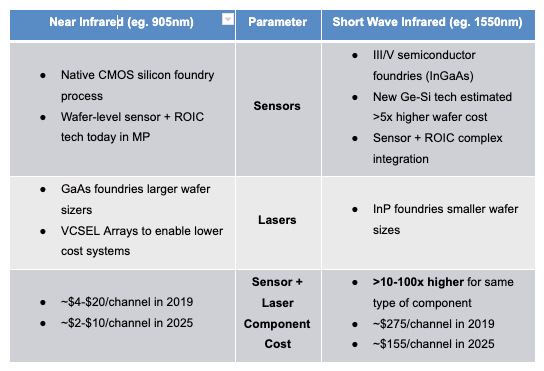
Tabela 3:Resumo das considerações de custo. (Fonte da imagem:IHS Markit)
A dinâmica do mercado LiDAR também não favorece o campo SWIR. O mercado de direção autônomo não cresceu tão rapidamente quanto as expectativas do mercado há cinco anos, e os sistemas de autonomia de nível 4 e nível 5, para os quais o LiDAR é uma obrigação, estão a anos de uma implantação em massa generalizada. Nesse ínterim, os mercados industrial e de robótica que usam LiDAR estão ainda mais preocupados com os custos e não precisam das vantagens de ultra-alto desempenho de um sistema SWIR, portanto, esses fabricantes não têm como trazer componentes os custos diminuem ao aumentar o volume, como costuma ser afirmado. Existe o problema do “ovo e da galinha” de obter o custo mais baixo quando o volume aumenta, mas é necessário o custo mais baixo para obter os volumes.
Resumo
Depois de mergulhar profundamente na tecnologia e nas diferenças entre os sistemas NIR e SWIR, fica claro por que a grande maioria dos sistemas LiDAR existentes hoje usa comprimentos de onda NIR. Embora a perspectiva para o futuro nunca seja 100% certa, é evidente que o custo e a disponibilidade dos fornecedores de ecossistemas são fatores-chave, e os sistemas baseados em NIR certamente sempre serão mais baratos devido à vantagem da tecnologia e economias de escala para silício CMOS. E, embora o SWIR permita um sistema LiDAR de longo alcance, os LiDARs baseados em NIR também podem atingir os requisitos automotivos de longo alcance desejados, ao mesmo tempo em que tem um desempenho extremamente bom para configurações de curto a médio alcance também necessárias no ADAS e AD. A existência de LiDARs baseados em NIR em produção em massa para o mercado automotivo hoje mostra que a tecnologia foi comercializada e comprovada, mas ainda levará algum tempo para que a consolidação aconteça e os vencedores e perdedores se recuperem. Afinal, a indústria automobilística na virada do século 20 contava com 30 fabricantes diferentes, e esse número aumentou para quase 500 nos dez anos seguintes - mas levou apenas alguns anos para que a maioria deles desaparecesse. Espera-se que uma dinâmica semelhante aconteça com os fabricantes de LiDAR até o final desta década.
Referências
Yole Développement (2020). LiDAR para aplicações automotivas e industriais - Relatório de mercado e tecnologia de 2020
Amsrud, P. (25 de setembro de 2019). A corrida para um sistema LIDAR de baixo custo [apresentação em conferência] . Automotivo LIDAR 2019, Detroit, MI, Estados Unidos. IHS Markit.
- Bahman Hadji, diretor de desenvolvimento de negócios, divisão de detecção automotiva, ON Semiconductor
>> Este artigo foi publicado originalmente em nosso site irmão, EE Vezes.
Conteúdos Relacionados:
- Os especialistas em ADAS ponderam a integração do sensor em veículos futuros
- Cidades inteligentes:o caso para lidar em sistemas de transporte inteligentes
- O que está impulsionando a mudança nos sistemas eletrônicos automotivos
- A tecnologia de tempo de voo promete maior precisão
- Por que a tecnologia de detecção FIR é essencial para alcançar veículos totalmente autônomos
Para obter mais informações sobre o Embedded, assine o boletim informativo semanal da Embedded por e-mail.
Sensor
- Sensor Hall visa sistemas automotivos essenciais para a segurança
- Projetando sistemas de agricultura inteligente de código aberto
- Compreendendo os sensores
- “Pele eletrônica” bimodal
- Tempo de voo vs. Sistemas FMCW LiDAR
- Filme Sensor para Aeroespacial
- Sensor de pulmão-coração em miniatura em um chip
- Sensor de dióxido de carbono de estado sólido
- Sensor de qualidade do ar à base de carbono
- Tecnologia de sensor autônomo para feedback em tempo real sobre refrigeração e aquecimento