


IMUs MEMS de última geração — alto desempenho, escaláveis
Para descobrir o que está por vir para os sistemas de navegação automotiva MEMS, entrevistei Yang Zhao, CEO, e Teoman Ustun, VP de Marketing e Desenvolvimento de Negócios, ACEINNA, Inc. (Boston, MA).
Resumos técnicos: Por que você chama ACEINNA IMUs de próxima geração?
Yang Zhao: Em condições ideais, você pode navegar em um carro com uma câmera. Mas, para alcançar segurança e disponibilidade o tempo todo, os veículos autônomos dependem cada vez mais de tecnologias de sensores adicionais. No entanto, esses sensores como Vision, Radar, Lidar, GNSS, RTK podem ser cegados em determinadas situações. A IMU é o único sensor que continua a operar mesmo quando todos os outros sensores falham. Nosso desafio é aumentar o tempo em que o acerto de contas com a IMU será confiável. O produto atual que temos é mais de nível industrial de ponta, mas projetado para ser incorporado aos cartões de passageiros.
Teoman Ustun: A revolucionária tecnologia MEMS que estamos desenvolvendo alcançará o desempenho de um giroscópio de fibra óptica ao preço de uma solução MEMS de silício. Isso é basicamente uma tecnologia de mudança de jogo.
A cada geração, melhoramos o desempenho de nossa IMU em termos de Angular Random Walk (ARW), instabilidade de polarização e imunidade a vibração/choque. Com esta última geração também adicionamos uma arquitetura tripla redundante, que é extremamente importante por dois motivos. Melhora a confiabilidade do nível automotivo e também aumenta o desempenho da IMU. Por exemplo, que eu saiba, temos o único INS (sistema de navegação inercial) qualificado ASIL-B ISO 26262 (Nível de Integridade de Segurança Automotiva) integrado com IMU tripla redundante no mercado. Essa qualificação basicamente dá aos clientes automotivos a confiança de que nosso sensor gerará dados de forma robusta ao longo da vida útil do veículo.
Nossos mais novos IMUs também possuem recursos de arquitetura aberta que permitem que nossos clientes aproveitem seu know-how ou implementem seu molho secreto em nosso hardware.
Zhao: As IMUs de grau aeroespacial têm excelente estabilidade, mas são grandes, pesadas e caras — veja a Figura 1 para uma comparação dos diferentes graus de IMU. Pretendemos trazer ao mercado um sistema IMU que se aproxime do grau de navegação. Hoje, você pode obter IMUs de nível de navegação, mas todos eles usam giroscópios de fibra óptica e estão na faixa de preço de dezenas de milhares de dólares. Eles são grandes, pesados e caros, mas em aviônicos e militares, isso não é um fator decisivo.
Mas quando você fala em usar um IMU em um carro, ninguém pagaria esse tipo de dinheiro. Então, o que estamos tentando fazer é desenvolver uma tecnologia MEMS IMU de nova geração que possa atingir o desempenho de nível de navegação, que pode se aproximar dos níveis de desempenho do giroscópio de fibra óptica. Ao contrário de outros que inicialmente visavam IMUs de nível de consumidor e agora estão tentando transferi-los para aplicativos de alto desempenho, começamos com aplicativos de nível industrial de alto desempenho em mente, para definir os requisitos para nosso sensor automotivo.
Os produtos automotivos mais recentes que introduzimos são econômicos. Eles são muito projetados e desenvolvidos de baixo para cima para ter uma otimização de preço/desempenho para aplicações de alto volume. Nosso objetivo é um preço inferior a US $ 500 e, eventualmente, ainda menos.
Resumos técnicos: Você poderia explicar alguns dos recursos que melhoram a precisão, estabilidade e confiabilidade de sua nova IMU?
Ustun: Em primeiro lugar, nossos sensores IMU têm redundância tripla – são três acelerômetros e três giroscópios. Monitoramos todos os parâmetros críticos, incluindo tensões, correntes e temperaturas, bem como o desempenho de IMUs individuais. Ter essa redundância tripla nos permite implementar autoteste contínuo. Obtemos boa confiança sobre o desempenho do giroscópio e do acelerômetro comparando e contrastando esse fluxo de dados triplo.

Também temos seis graus de liberdade:os três acelerômetros e três giroscópios medem os eixos XYZ. Os giroscópios medem a velocidade de rotação, que quando integrada, dá mudança na posição angular. O acelerômetro mede a aceleração, que quando integrado dá velocidade e quando integrado novamente, dá posição. Ao processar dados de giroscópio e dados de acelerômetro e usar filtros e algoritmos otimizados para uma determinada aplicação, obtemos dados angulares realmente precisos para rotação, inclinação e guinada (consulte a Figura 2). Os dados mais críticos para uma aplicação automotiva são a guinada, que indica o grau de derrapagem do carro. Pitch indica se você está subindo ou descendo uma colina. Felizmente, você nunca verá um rolo em seu carro.
Resumos técnicos: Que tipo de precisão você poderia sustentar em que período de tempo?
Ustun: Isso é muito difícil de dizer porque depende de muitos cenários diferentes. Atualmente, temos que alcançar a precisão do nível da pista. Uma pista tem cerca de três metros de largura e um carro de passeio tem cerca de dois metros de largura. Como você quer ter certeza de que não está indo além da pista, você tem cerca de meio metro a mais ou a menos antes de se afastar demais. Em velocidades típicas de automóveis, uma correção de meio metro pode ser alcançada em menos de um segundo. Uma vez que, sob o cálculo morto, você pode manter a precisão necessária por 60 a 90 segundos, nossa IMU pode facilmente manter um carro dentro de sua faixa.
Resumos técnicos: Assim, uma IMU lhe dá uma precisão relativa. E a precisão absoluta?
Ustun: Os dados de localização absoluta são geralmente derivados de um sinal GNSS. Historicamente, a precisão posicional dos receptores GNSS tem sido de um metro ou mais. Portanto, o GNSS por si só não é bom o suficiente para a precisão necessária no nível da pista de automóveis de até 2 cm.
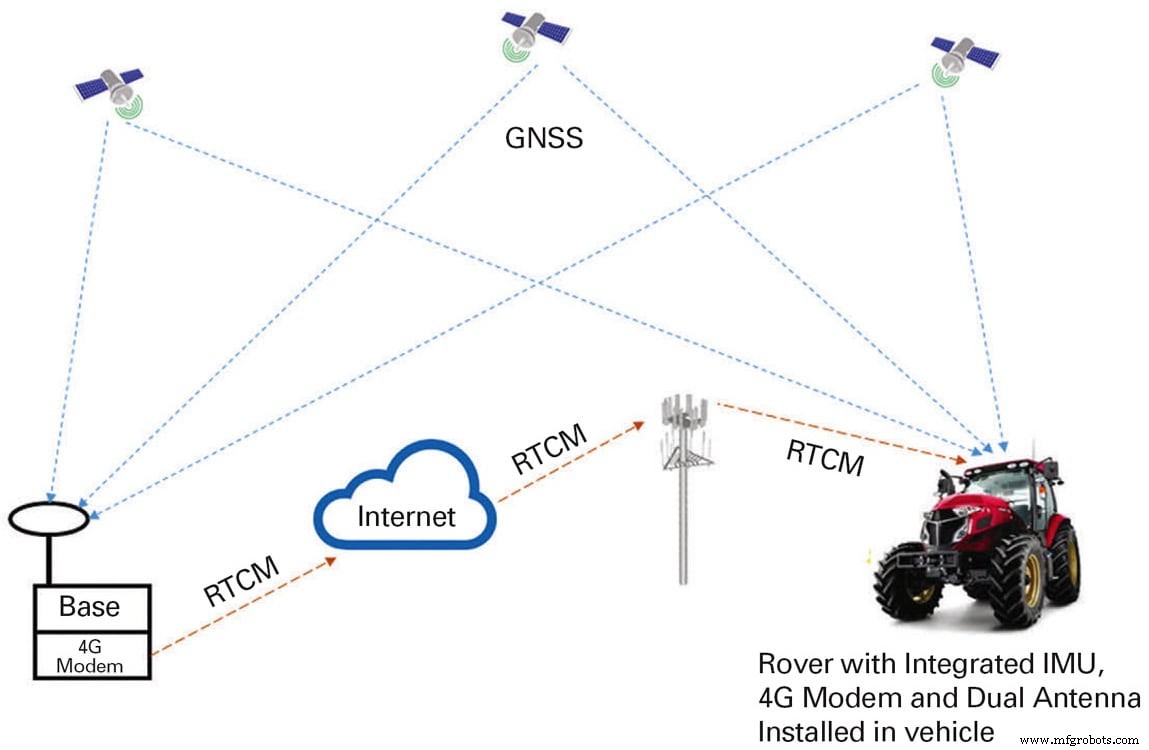
Real-Time Kinematics (RTK) é uma técnica para melhorar a precisão posicional de um receptor GNSS. Ele usa uma rede de estações base que podem enviar correções para nosso mecanismo de posicionamento RTK montado no veículo, que as usa para recalcular sua posição com mais precisão.
RTK é um serviço que você pode comprar ou assinar de várias fontes. O que estamos vendo cada vez mais é a infraestrutura de comunicação – até mesmo provedores de serviços de telecomunicações como Verizon, Softbank ou China Mobile – começaram a oferecer serviços RTK. De nossa perspectiva de produto, somos agnósticos em relação ao provedor de serviços - pretendemos oferecer suporte a todos e quaisquer desses provedores de serviços RTK para ajudar nossos clientes a atingir os limites de precisão que procuram. Estamos fornecendo uma solução que é tanto hardware quanto software.
Embora não prestemos o serviço, permitimos que os nossos clientes escolham o que mais lhe convém. No entanto, qualificamos esses serviços primeiro. Certificamo-nos de que são compatíveis com o nosso hardware e software. E, em seguida, colocamos em nosso site para oferecer aos clientes a flexibilidade de escolher a partir de uma lista de provedores de serviços. Mais comumente, o RTK vem como um serviço em uma rede 4G LTE. Se não houver recepção 4G LTE, existem maneiras alternativas de receber os sinais de correção, como comunicação baseada em satélite.
Para RTK, você coloca estações base em uma rede:há uma regra prática que normalmente você coloca estações base em um raio de 50 milhas. Essas estações base são posicionadas de modo que suas localizações sejam conhecidas com muita precisão. As correções são geradas medindo o erro entre o sinal GNSS e a localização conhecida com precisão de uma estação base.
Assim, temos uma solução abrangente:Um sistema de navegação inercial que inclui nossa IMU tripla redundante de alto desempenho de seis graus de liberdade acoplado a um receptor GNSS de dupla frequência, em dois formatos diferentes. Um é um fator de forma de módulo. Se o cliente quiser refluir isso em sua própria Unidade de Controle do Motor (ECU), ele pode fazer isso ou, caso contrário, pode usar nossa solução plug and play embalada. Basicamente, basta conectar a antena GPS/GNSS e o sistema funcionará no barramento CAN ou Ethernet.
Este artigo foi escrito por Ed Brown, editor da Sensor Technology. Para mais informações, visite aqui .
Inspeção Automatizada de Raios-X
A alimentação sem fio de RF libera a onipresença das redes de sensores
Sensor
- VersaLogic lança computador integrado de alto desempenho baseado em Xeon
- Unidade de negócios de materiais de alto desempenho da Lanxess será legalmente independente
- Tecnologia HDPE de alta barreira de umidade para embalagens flexíveis multicamadas
- Rotulagem no molde:Alto desempenho com custo mais baixo
- Liga de alumínio moldado por spray de alto desempenho DISPAL S220 F
- Liga de alumínio moldado por spray de alto desempenho DISPAL S220 O
- Liga de alumínio moldado por spray de alto desempenho DISPAL S225 F
- Liga de alumínio moldado por spray de alto desempenho DISPAL S232 T6
- Liga de alumínio moldada por spray de alto desempenho DISPAL S232 T6x
- Liga de alumínio moldado por spray de alto desempenho DISPAL S250 F