


Introdução aos acelerômetros capacitivos:medição de aceleração com sensoriamento capacitivo
Neste artigo, discutiremos como usar o sensor capacitivo para medir a aceleração.
Os acelerômetros são usados em diferentes áreas de aplicação. Por exemplo, em aplicações automotivas, acelerômetros são usados para ativar o sistema de airbag. As câmeras usam acelerômetros para estabilização ativa de imagens. Os discos rígidos de computador também contam com acelerômetros para detectar choques externos que podem danificar a cabeça de leitura / gravação do dispositivo. Nesse caso, o acelerômetro suspende a operação do inversor quando ocorre um choque externo. Estas são apenas algumas aplicações do acelerômetro.
As possibilidades são infinitas para a finalidade de uso desses dispositivos. Os enormes avanços nas tecnologias de microfabricação possibilitaram os pequenos acelerômetros microusinados de hoje. Na verdade, o pequeno tamanho e o baixo custo são dois dos principais fatores que nos permitem aplicar esses dispositivos a um amplo espectro de aplicações.
Neste artigo, daremos uma olhada na física da medição da aceleração. Veremos como uma estrutura de massa-mola-amortecedor (também conhecido como massa-amortecedor-mola) pode converter a aceleração em uma quantidade de deslocamento e como a abordagem de detecção capacitiva pode ser aplicada para converter esse deslocamento em um sinal elétrico proporcional ao aceleração aplicada.
Medindo a aceleração usando um amortecedor Mass-spring
Uma estrutura massa-mola-amortecedor, conforme mostrado na Figura 1, pode ser usada para medir a aceleração.
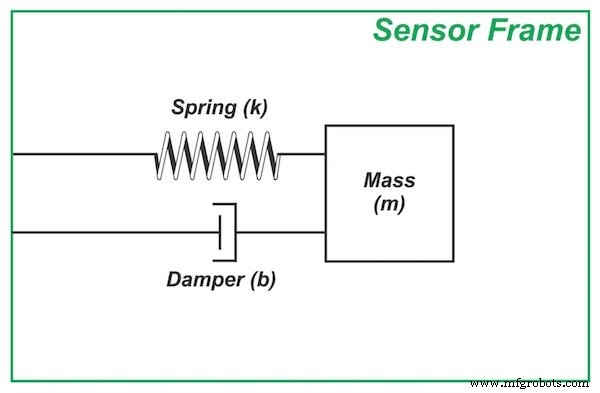
Figura 1. A estrutura massa-mola-amortecedor
Uma quantidade conhecida de massa, comumente referida como massa de prova (ou massa de teste), é conectada à estrutura do sensor por meio de uma mola.
Embora o amortecedor seja um componente vital deste sistema, vamos deixá-lo na prateleira até o próximo artigo desta série, pois pode ser um pouco misterioso para os EEs e alguns parágrafos podem ser necessários para introduzir os conceitos básicos de um amortecedor.
Vamos ver como a estrutura mostrada na Figura 1 pode detectar aceleração.
Quando a estrutura do sensor acelera devido a uma força externa, a massa de prova tende a “ficar para trás” devido à sua inércia. Isso muda a posição relativa da massa de prova em relação à estrutura do sensor, conforme ilustrado abaixo.
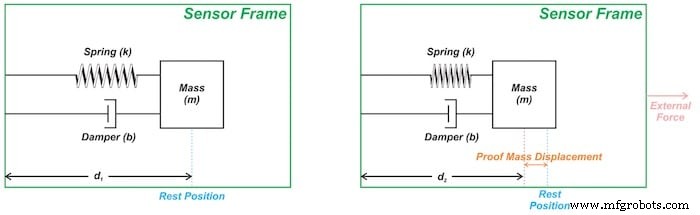
Figura 2. (a) A massa de prova está em sua posição de repouso quando não há força externa. (b) Quando o quadro acelera para a direita, o observador no quadro do sensor observa que a massa de prova é deslocada para o lado esquerdo de sua posição de repouso.
A Figura 2 (a) mostra a massa de prova em sua posição de repouso quando não há força externa. Quando uma força externa é aplicada à estrutura, conforme mostrado na Figura 2 (b), a estrutura acelera para a direita. A massa de prova inicialmente tende a permanecer em repouso, o que muda a posição relativa da massa de prova em relação ao quadro (d 2
Um observador no referencial não inercial (isto é, acelerando) do sensor observa que a massa de prova é deslocada para o lado esquerdo de sua posição de repouso. A mola é comprimida por causa do deslocamento da massa de prova e exerce uma força proporcional ao deslocamento na massa de prova. A força exercida pela mola empurra a massa de prova para a direita e a faz acelerar na direção da força externa.
Se os valores apropriados forem escolhidos para os diferentes parâmetros do sistema, o deslocamento da massa de prova será proporcional ao valor da aceleração da estrutura (após a resposta transitória do sistema morrer).
Para resumir, uma estrutura de massa-mola-amortecedor converte a aceleração da estrutura do sensor para o deslocamento de massa à prova. A questão que fica é:como podemos medir esse deslocamento?
Medindo o deslocamento de massa de prova:abordagem de detecção capacitiva
O deslocamento de massa de prova pode ser medido por vários meios. Um método comum é a abordagem de detecção capacitiva ilustrada na Figura 3.
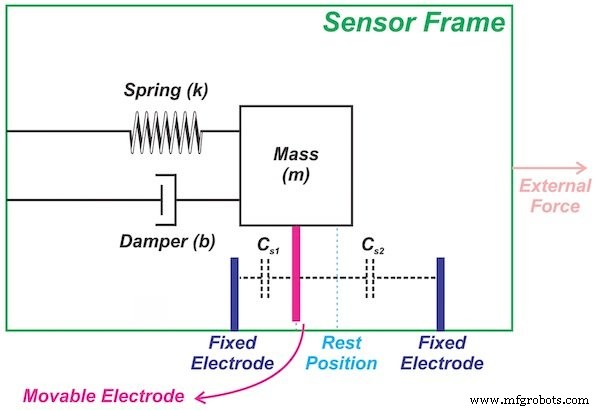
Figura 3
Existem dois eletrodos fixados na estrutura do sensor junto com um eletrodo móvel conectado à massa de prova. Isso cria dois capacitores, C s1 e C s2 , conforme mostrado na Figura 3.
Conforme a massa de prova se move em uma direção, a capacitância entre o eletrodo móvel e um dos eletrodos fixos aumenta enquanto a capacitância do outro capacitor diminui. É por isso que só precisamos medir as mudanças nos capacitores de detecção para detectar o deslocamento da massa de prova, que é proporcional à aceleração de entrada.
Condicionamento de sinal do acelerômetro usando demodulação síncrona
Para medir com precisão as mudanças nos capacitores de detecção, podemos aplicar a técnica de demodulação síncrona. A Figura 4 mostra uma versão simplificada do condicionamento de sinal empregado na família ADXL de acelerômetros da Analog Devices.
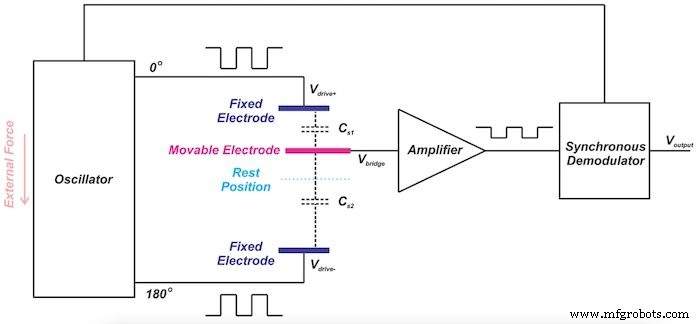
Figura 4. Imagem (adaptada) cortesia da Analog Devices
Neste caso, uma onda quadrada de 1 MHz é usada como a excitação AC dos capacitores de detecção C s1 e C s2 . As ondas quadradas aplicadas aos eletrodos fixos têm a mesma amplitude, mas estão 180 ° defasadas entre si. Quando o eletrodo móvel está em sua posição de repouso, a voltagem na entrada do amplificador é zero volts.
Quando o eletrodo móvel se aproxima de um dos eletrodos fixos, uma porção maior da tensão de excitação desse eletrodo aparece na entrada do amplificador V ponte , o que significa que a onda quadrada que aparece na entrada do amplificador está em fase com a tensão de excitação do eletrodo mais próximo.
Por exemplo, na Figura 4, a saída amplificada é uma onda quadrada em fase com V drive + porque C s1 é maior que C s2 .
A amplitude de V ponte é uma função do deslocamento da massa de prova; no entanto, também precisamos saber a relação de fase da V ponte com relação a V drive + e V drive- para determinar em qual direção a massa de prova é deslocada.
O demodulador síncrono basicamente multiplica a saída do amplificador pela tensão de excitação (ou V drive + ou V drive- ) para converter a onda quadrada na saída do amplificador em uma tensão DC que revela a quantidade de deslocamento, bem como sua direção.
Para saber como a demodulação síncrona consegue isso, consulte meu artigo sobre as técnicas de demodulação LVDT:Demodulação LVDT:Tipo retificador vs. Demodulação Síncrona.
Por que não usamos um único capacitor de detecção?
A detecção capacitiva, representada na Figura 3, tem uma natureza diferencial:quando C s1 aumenta, C s2 diminui e vice-versa.
Também é possível empregar sensoriamento capacitivo de extremidade única, onde um dos eletrodos fixos é omitido, portanto, há apenas um capacitor variável. Nesse caso, podemos modelar o sistema conforme mostrado na Figura 5.
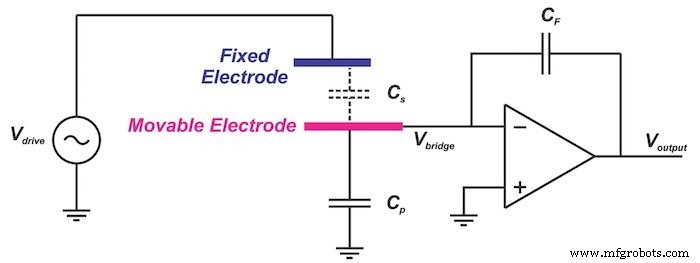
Figura 5
Esta versão de terminação única parece ser uma solução mais simples. Então, por que não usamos um único capacitor de detecção?
Estrutura do capacitor de detecção única:Saída não linear
Vamos examinar este circuito mais de perto.
Na figura acima, C p modela a capacitância parasita total do eletrodo móvel ao solo. Idealmente, V bridge está no terreno virtual e podemos ignorar C p porque tem terreno de um lado e terreno virtual do outro.
Portanto, a saída pode ser obtida simplesmente como:
\ [V_ {output} =- \ frac {C_s} {C_F} V_ {drive} \]
Equação 1
Observe que o caminho da corrente de polarização não é mostrado na Figura 5. Usando a equação básica do capacitor, podemos expressar a saída em termos do deslocamento da massa de prova.
Para um capacitor C, temos:
\ [C =\ epsilon \ frac {A} {d} \]
Equação 2
onde ε é a permissividade dielétrica, A é a área da placa paralela e d é a distância entre as duas placas condutoras. Para simplificar, suponha que os dois capacitores C s e C F têm o mesmo ε e A.
A Equação 1 pode então simplificar para:
\ [V_ {output} =- \ frac {d_F} {d_s} V_ {drive} \]
onde d F e d s denotam a distância entre os eletrodos de C F e C s , respectivamente. d s pode ser expresso como a soma de uma distância inicial d 0 e o valor de deslocamento Δd.
A partir daí podemos obter:
\ [V_ {output} =- \ frac {d_F} {d_0 + \ Delta d} V_ {drive} \]
Como você pode ver, o termo de deslocamento (Δd) está no denominador da equação de saída. Portanto, a saída é uma função não linear do deslocamento da massa de prova Δd.
Estrutura diferencial:saída linear
Vamos examinar a função de transferência do sensoriamento capacitivo diferencial representado na Figura 4.
Você pode verificar que, com detecção capacitiva diferencial, V ponte É dado por:
\ [V_ {bridge} =\ frac {C_ {s1} V_ {drive +} + C_ {s2} V_ {drive -}} {C_ {s1} + C_ {s2 }} \]
Aplicando a Equação 2 e assumindo que os dois capacitores C s1 e C s2 têm os mesmos valores ε e A, obtemos:
\ [V_ {bridge} =\ frac {d_ {s2} V_ {drive +} + s_ {s1} V_ {drive -}} {d_ {s1} + d_ {s2 }} \]
Equação 3
onde d s1 e d s2 denotam a distância entre os eletrodos de C s1 e C s2 , respectivamente. Quando d s1 aumenta, d s2 diminui na mesma quantidade e vice-versa.
Assumindo que:
\ [d_ {s1} =d_0 - \ Delta d \]
\ [d_ {s2} =d_0 + \ Delta d \]
\ [V_ {drive +} =- V_ {drive-} \]
A Equação 3 simplifica para:
\ [V_ {bridge} =\ frac {\ Delta d} {d_0} V_ {drive +} \]
Como você pode ver, com uma estrutura diferencial, a tensão de saída é uma função linear do deslocamento da massa de prova Δd. Observe que, embora pudéssemos usar um software para remover os erros de linearidade do sensor, ter uma resposta linear é desejável, pois aumenta a precisão da medição e facilita a calibração do sistema.
Conclusão
Vimos como uma estrutura de massa-mola-amortecedor pode converter a aceleração em uma quantidade de deslocamento e como a abordagem de detecção capacitiva pode ser aplicada para converter esse deslocamento em um sinal elétrico proporcional à aceleração aplicada.
Também mencionamos brevemente que, para que o deslocamento da massa de prova seja proporcional à aceleração aplicada, diferentes parâmetros do sistema massa-mola-amortecedor devem ser escolhidos apropriadamente.
No próximo artigo, iremos derivar a função de transferência do sistema massa-mola-amortecedor para obter uma visão mais profunda da operação do sistema.
Para ver uma lista completa dos meus artigos, visite esta página.
Sensor
- Uma introdução à impressão 3D com plásticos
- Truphone permite implantações em massa de IoT com colaboração iSim
- Würth:sensor de aceleração de 3 eixos com funcionalidades predefinidas
- Medindo a temperatura com RASPBERRY PI
- Não consegue lidar com uma massa de reclamações de clientes? AI para o resgate
- Sensor Tátil Universal com Condutores Acoplados Eletromecanicamente
- Acelerômetro baseado em luz a laser
- Velocidade ou aceleração? o que é mais importante com o corte a jato de água
- Uma Introdução ao Soldador a Ponto de Descarga Capacitiva
- Predefinição de ferramenta CNC e medição de ferramenta CNC uma introdução