


Controlador de nível de água totalmente automático usando SRF04
Controlador de nível de água totalmente automático usando SRF04, L293D e PIC16F84A
Introdução ao controlador automático de nível de água
Monitoramento e controle do nível de água em tanques de água é um dos trabalhos mais importantes em quase muitas áreas residenciais e comerciais. Na maioria dos casos, principalmente em edifícios residenciais, devido à indisponibilidade de qualquer meio automático, torna-se cansativo e inconveniente monitorar frequentemente o nível de água nos tanques. De fato, para lugares com escassez de água, o transbordamento de água seria uma coisa bastante cara a pagar.
A única solução para o problema acima é ter uma maneira automática de monitorar e controlar o nível da água. Embora existam muitas técnicas, como usar sensores de distância, usar sondas de corrente, usar ranger ultrassônico etc., aqui vamos nos concentrar no uso do ranger ultrassônico.

- Projeto relacionado: Circuito de alarme de chuva - Projeto de detector de neve, água e chuva
Visão geral do sistema do controlador de nível de água
O sistema consiste em um sensor de alcance ultrassônico colocado no topo do tanque de modo que, uma vez acionado, ele envia um sinal ultrassônico. A água presente no tanque refletiria o sinal. O sensor receberia esse sinal e o tempo decorrido entre esses dois sinais forneceria uma estimativa sobre a distância percorrida pelos sinais, portanto, o nível da água a partir do topo.
Aqui um microcontrolador é usado para enviar o sinal de disparo para o ranger ultrassônico. Uma vez que um eco é recebido, o intervalo de tempo entre os dois pulsos é calculado e isso é diretamente proporcional ao nível da água. A defasagem de tempo é calculada com a ajuda do Timer, cujo número de pulsos de contagem denota a distância percorrida pelo sinal, ou o nível da água.
Uma vez que aqui o ranger é colocado em cima do tanque, o controle do fluxo de água é feito considerando o nível de água do topo do tanque. Por exemplo, se o alcance medido estiver entre 0 a 1 cm, o tanque está transbordando e o microcontrolador envia um sinal de controle para girar o motor no sentido inverso, para remover o excesso de água. '
Se o alcance estiver entre 2 e 5 cm, o tanque está cheio e o microcontrolador envia um sinal de controle para desligar o motor. Se o alcance estiver acima de 5 cm, o tanque está quase vazio e o microcontrolador envia um sinal de controle para girar o motor no sentido direto.
Diagrama de circuito do controlador automático de nível de água
Clique na imagem para ampliar
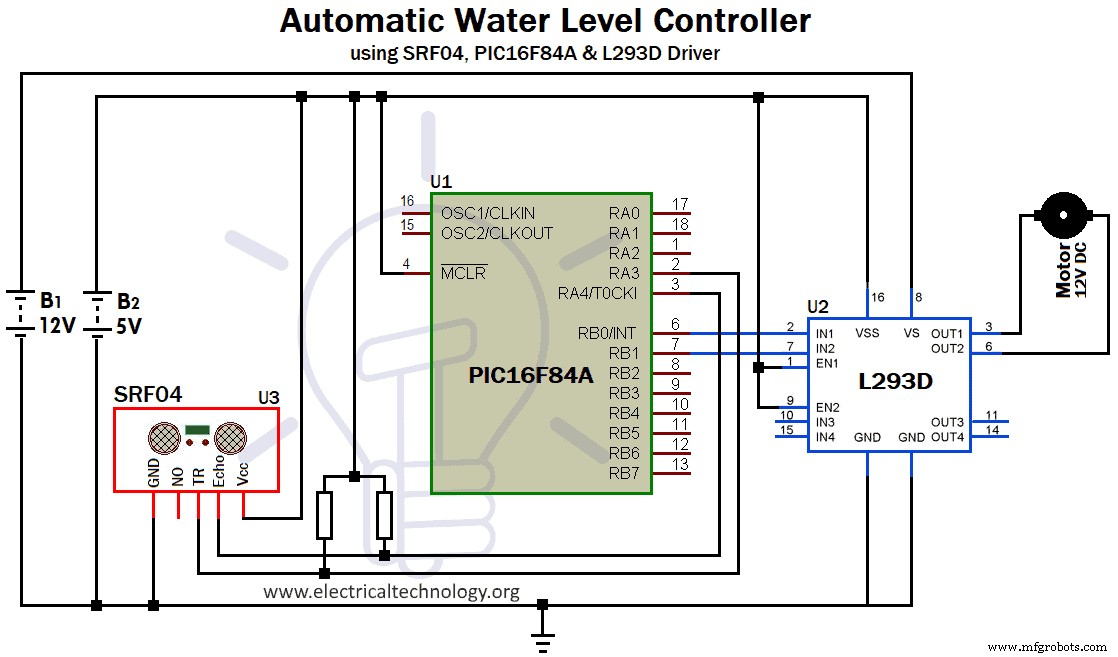
Figura 1:Controlador de nível de água
Descrição das peças
Os seguintes componentes seriam usados para projetar o circuito.
- Telémetro ultrassônico SRF04
- Microcontrolador PIC PIC16F84A
- Motorista L293D
- Motor CC
- Dois resistores de 1K
Vamos ter uma breve ideia sobre cada componente
Telêmetro ultrassônico SRF04 :
O SRF04 é um ranger ultrassônico de alta qualidade que é usado em muitas aplicações robóticas para facilitar a detecção de obstáculos. Requer um sinal de 10 microssegundos para ser acionado.

Figura 2:Telêmetro ultrassônico SRF04
Uma vez acionado, ele envia 8 pulsos de ultrassom, a uma frequência de 40 KHz e simultaneamente envia a linha de eco para ALTO. Uma vez que recebe o sinal refletido ou eco, abaixa a linha de eco para LOW.
Assim, a largura do pulso de eco denota a distância percorrida pelo sinal ou, em outras palavras, a distância do ranger ao objeto. A linha de eco é, portanto, um pulso cuja largura é proporcional à distância do objeto. Para 1cm, a largura do pulso de eco seria de 58 microssegundos. 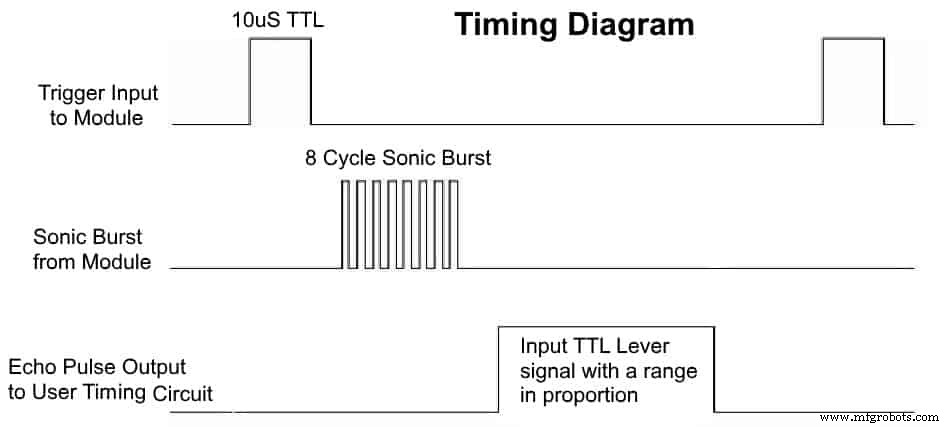
Figura 3:diagrama de tempo SRF04
Microcontrolador PIC PIC16F84A:
Figura 4:Microcontrolador PIC PIC16F84A
É um Microcontrolador Flash de 8 bits e 18 pinos compatível com CMOS com um único Timer de 8 bits (com pré-escalador programável de 8 bits). A operação do Timer é controlada através dos seguintes registradores – OPTION_REG, TMR0 e INTCON. O OPTION_REG é um registrador de 8 bits cujo 5
th
bit (T0CS) seleciona a operação de temporizador ou contador necessária.
Acertar o bit seleciona a operação do contador, enquanto apagá-lo seleciona a operação do temporizador. TMR0 é o registrador do temporizador, enquanto INTCON é o registrador de interrupção cujo 5
th
bit (T0IE) denota o sinalizador do temporizador, ou seja, é definido quando o temporizador transborda. 
Motorista L293D:
Figura 5:Motor Driver IC L293D
É um IC de driver de motor DC baseado em ponte H de 16 pinos. Tem a capacidade de acionar dois motores e nos dois sentidos. Consiste em dois pinos de habilitação (Pin1 e 9) que quando ajustados em HIGH, habilitam a operação do IC. Ele basicamente atua como uma interface entre o microcontrolador e o motor DC. Consiste em quatro pinos de entrada – dois para cada circuito de ponte H. Dada a seguir é uma tabela que denota o controle do motor. 
| IN1(Pino 2) | IN2 (Pino 7) | EN1 (Pino 1) | Operação do motor |
| ALTO | ALTO | ALTO | DESATIVADO |
| BAIXO | BAIXO | ALTO | DESATIVADO |
| ALTO | BAIXO | ALTO | LIGADO (sentido horário) |
| BAIXO | ALTO | ALTO | LIGADO (sentido anti-horário) |
| X | X | BAIXO | DESATIVADO |
Nota:Como o SRF04 é um dispositivo compatível com TTL e o PIC16F84A é compatível com CMOS, estamos usando um resistor de pull up de valor 1K, para compensar a mudança no nível de tensão.
Trabalho e operação do controlador automático de nível de água
O programa é escrito de forma que um pulso de 10 microssegundos seja enviado do microcontrolador para acionar o ranger ultrassônico. Isso é escrito usando uma função de atraso. O registrador do temporizador, TMR0 é carregado com o valor decimal 200, de modo que faz 55 contagens.
A saída do SRF04, o sinal de eco é recebido no pino RA4 (o pino do relógio do temporizador, fornecendo assim pulso de relógio externo ao temporizador). Uma vez que o sinal de eco faz uma transição de ALTO para BAIXO, o temporizador é ativado. À medida que o temporizador conta, o bit de sinalização de interrupção, T0IE, é monitorado. Uma vez definido, o temporizador é desativado.
O procedimento é repetido para outro pulso de eco e assim por diante. O número de vezes que o temporizador opera é calculado e isso denota o número de pulsos de eco. Como cada pulso de eco é de 58 microssegundos, denota 1 cm. Assim, 5 pulsos de eco denotariam 5cm. O valor desta contagem, armazenado em um número inteiro, é utilizado para controlar o motor CC.
Se o valor estiver entre 2 e 5, o microcontrolador envia sinais HIGH para os pinos RB0 e RB1 (conectados a IN1 e IN2 de L293D respectivamente), para desligar o motor. Se o valor estiver entre 5 e 20, o microcontrolador envia um sinal HIGH para IN1 e um sinal LOW para IN2, para ligar o motor e girá-lo no sentido horário. Se o valor estiver entre 0 e 1, o microcontrolador envia sinal LOW para IN1 e sinal HIGH para IN2, para ligar o motor e girá-lo no sentido anti-horário.
Vantagens do Controlador Automático de Nível de Água usando SRF04
- Seria um sistema simples e conveniente.
- Seria um sistema de baixo custo devido ao uso de componentes de baixo custo.
- O uso da técnica automática eliminaria os obstáculos enfrentados no controle do nível da água usando meios manuais.
- Como não são usadas peças mecânicas, isso eliminaria o risco de desgaste mecânico ou corrosão.
Desvantagens do Controlador Automático de Nível de Água
- O telêmetro ultrassônico, SRF04, estaria sujeito a amortecimento devido ao uso de muitos componentes eletrônicos e, portanto, deve ser isolado adequadamente.
- Este sistema foi projetado de forma que o sensor e o atuador precisem ser colocados próximos um do outro. Nas palavras do leigo, esse sistema de controle é para locais onde a caixa d'água fica próxima à bomba d'água. Assim, para muitos edifícios onde são usadas bombas submersíveis e tanques de água nos telhados, este sistema de controle automático de nível de água não pode ser usado. No entanto, isso pode ser modificado usando o circuito de comunicação.
Tecnologia industrial
- Usando tecnologias sem água no processo de tingimento
- 4 vantagens de usar a solução inteligente de detecção de vazamentos em edifícios
- 5 vantagens de usar o sistema de detecção de vazamento de água alimentado por IoT Biz4intellias nas indústrias
- Monitoramento e controle inteligente do nível de água para gerenciamento eficaz da água
- 7 benefícios de usar a solução de monitoramento de nível inteligente da Biz4Intellia
- Usando um sistema de monitoramento de nível de rio alimentado por IoT para gerenciamento eficiente de água
- O poliuretano é impermeável?
- Lista de materiais manual x automática
- 7 benefícios de uma cozinha totalmente/semi automática para cozinhas na nuvem
- O que é uma bomba de água automática?