


Detecção de posição de efeito Hall:Linearidade e inclinação de resposta para configurações deslizantes
Saiba como várias decisões relacionadas a soluções de detecção de efeito Hall - especificamente para configurações deslizantes - podem afetar seus projetos.
Sensores de efeito Hall permitem soluções eficientes para detecção de posição. Com os sensores Hall, não há conexão mecânica entre o sensor e a parte móvel e, portanto, uma maior confiabilidade e durabilidade podem ser alcançadas.
Existem várias configurações diferentes de sensor magnético que podem ser usadas em aplicações de detecção de posição baseadas no efeito Hall. Neste artigo, veremos uma configuração magnética deslizante que pode produzir uma curva linear de Gauss versus distância. Veremos também que é possível usar uma combinação de ímãs para ajustar a inclinação da curva de Gauss versus distância.
Linearidade pode ser um fator de decisão
Em um artigo anterior, examinamos as configurações frontais e deslizantes simples. Esses dois arranjos são mostrados na Figura 1.
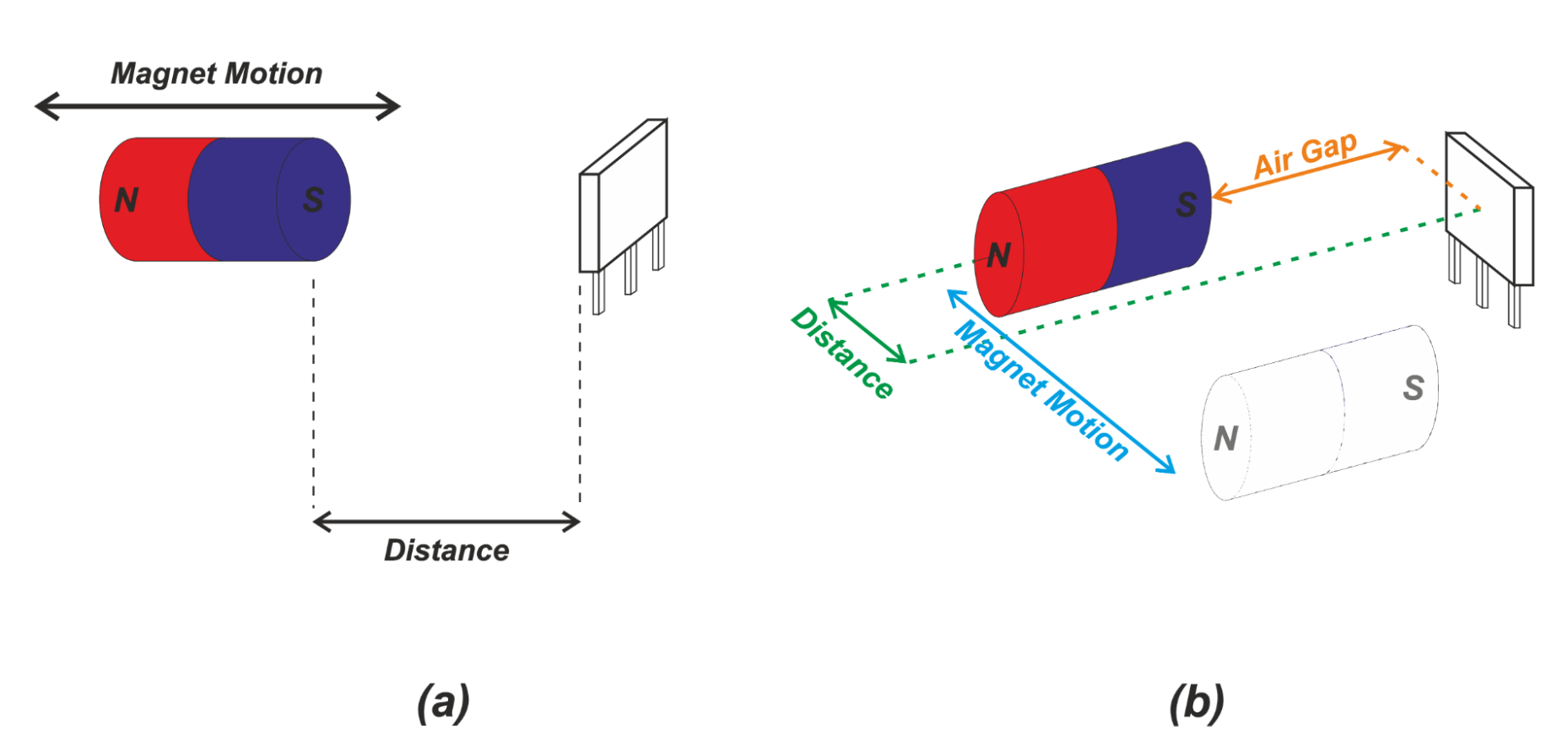
Figura 1 (a). De frente e (b) detecção deslizante.
Vimos que a relação entre o campo detectado e a distância não é linear com os arranjos acima. Essas configurações de sensor magnético são geralmente usadas como detectores de proximidade em aplicações onde os requisitos de precisão não são muito exigentes.
No entanto, quando é necessário um controle preciso da posição ao longo do curso de detecção, preferimos ter uma relação linear entre a saída do sensor e o deslocamento. Na verdade, embora possamos usar um software para remover os erros de linearidade do sensor, ter uma resposta linear é desejável, pois aumenta a precisão da medição e facilita a calibração do sistema.
Detecção de deslizamento linear
A Figura 2 (a) mostra um arranjo deslizante que exibe uma relação linear entre o componente z do campo magnético detectado e o deslocamento do ímã. A Figura 2 (b) mostra a densidade do fluxo magnético (na direção do eixo z) versus o curso do ímã.
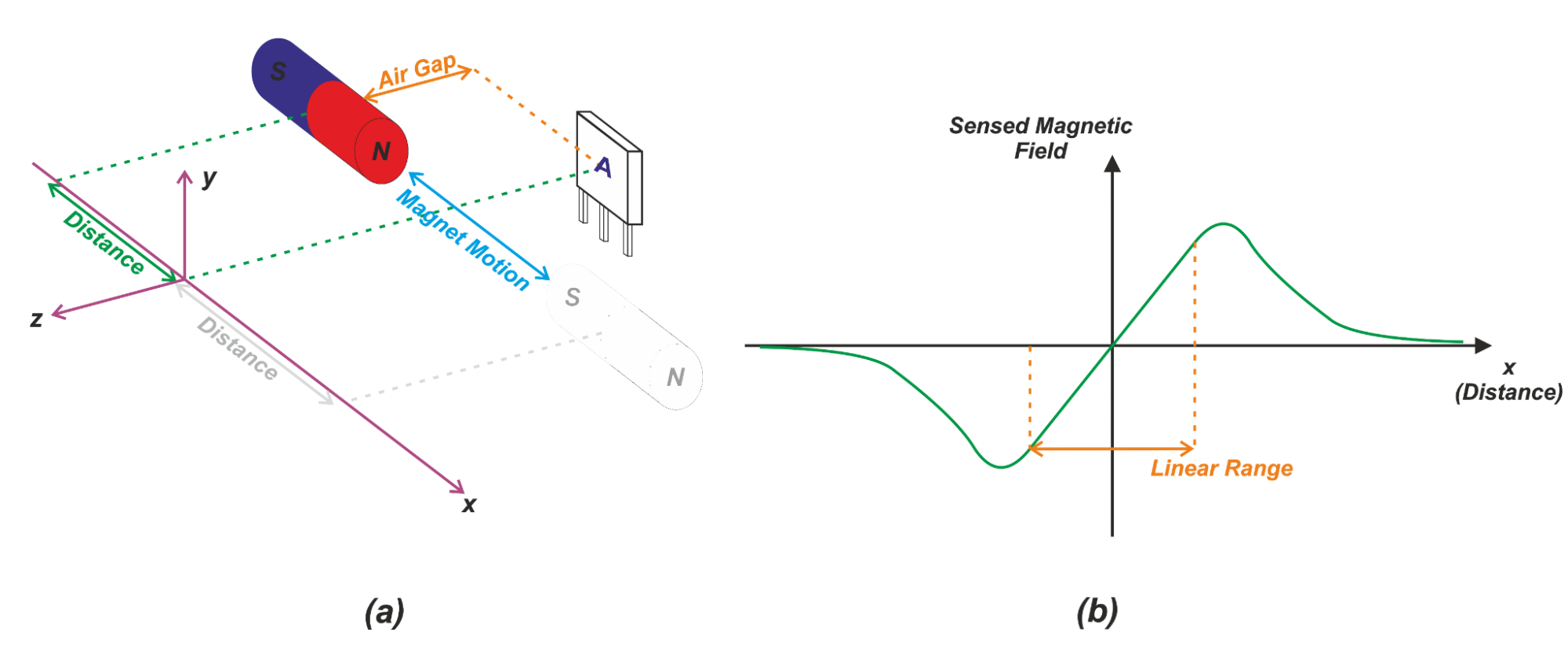
Figura 2 (a). Uma configuração deslizante com resposta linear (b) densidade de fluxo magnético versus posição do ímã
Quando o ímã está no lado esquerdo do sensor (x <0), as linhas do campo magnético do ímã produzem um componente na direção oposta do eixo z. Observe que as linhas de campo vão do pólo norte ao pólo sul do ímã.
A Figura 3 mostra uma das linhas de campo passando pelo sensor.
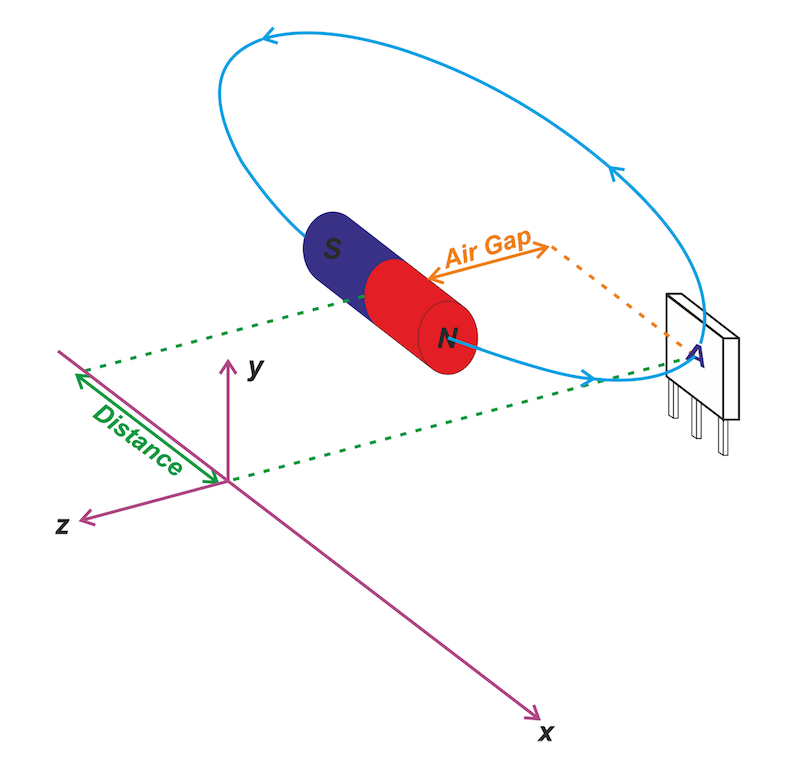
Figura 3. Direção das linhas do campo magnético através de um sensor de efeito Hall
Portanto, para x <0, o componente z do campo magnético detectado é negativo. Quando o ímã atinge a posição central, o campo na direção z será zero. Para um deslocamento positivo (x> 0), o campo magnético produzirá um componente na direção do eixo z (campo magnético positivo). Para grandes deslocamentos em qualquer direção, um número menor de linhas de campo pode passar pelo sensor. Portanto, o campo magnético detectado pelo sensor diminui.
Uma das principais características desse arranjo é que o componente z do campo magnético exibe uma relação linear com o deslocamento em torno da origem. Essa faixa linear é mostrada na Figura 2 (b). O comprimento da região linear é ligeiramente menor que o comprimento do ímã. Por exemplo, com um ímã de 22 mm, a região linear pode se estender de cerca de -10 mm a +10 mm. Esse comportamento linear nos permite detectar com mais facilidade e precisão a posição de um objeto em movimento.
E se precisarmos de um intervalo linear maior?
Podemos usar um ímã mais longo para aumentar a faixa linear da configuração acima; no entanto, certas aplicações não podem acomodar um grande ímã no sistema. Além disso, com ímãs longos, o custo pode ser um fator limitante. Se um curso maior do que o comprimento do ímã precisa ser detectado, podemos usar uma série de sensores para estender a faixa de medição. Isso é mostrado na Figura 4.
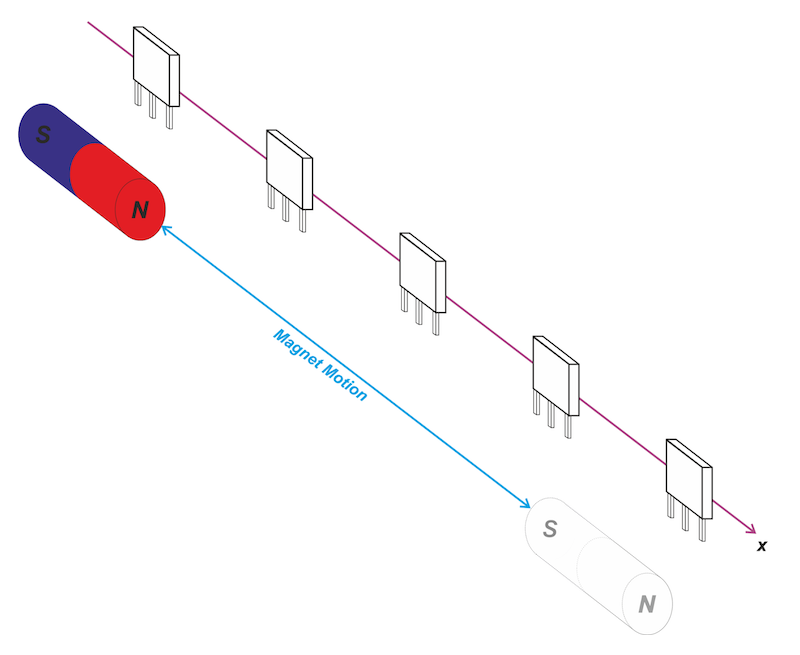
Figura 4. Usando vários sensores de efeito Hall para aumentar o alcance linear
Nesse caso, precisamos processar os dados de mais de um sensor para encontrar a posição do objeto. Para obter mais detalhes, consulte esta nota de aplicação de TI.
Detectando a presença de um objeto
A configuração deslizante na Figura 2 também pode ser usada para detectar a presença de um objeto (em vez de determinar a posição do objeto ao longo de seu curso). Suponha que no exemplo representado na Figura 2 (a), o ímã se move paralelamente ao eixo x da esquerda para a direita. Suponha que a operação magnética e os pontos de liberação de nosso sensor de efeito Hall digital (LIGADO / DESLIGADO) sejam como mostrado na Figura 5.
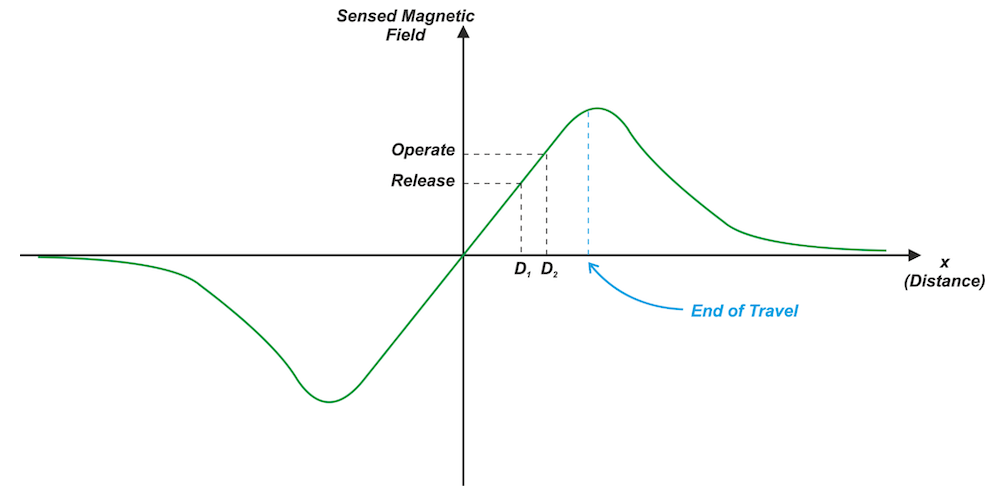
Figura 5. Usando uma configuração deslizante para detecção ON / OFF
Conforme o ímã se aproxima do sensor da esquerda para a direita, a intensidade do campo magnético se torna cada vez maior. Em D2, o campo magnético detectado é igual ao ponto de operação magnético que liga o sensor. Aproximar o ímã do sensor leva a um campo magnético ainda maior e mantém o sensor LIGADO.
Agora, se movermos o sensor na direção oposta (da direita para a esquerda), o campo magnético diminui. Em D1, o campo magnético se torna menor do que o ponto de liberação que desliga o sensor. Isso nos permite detectar a presença do objeto. Também podemos usar essa estrutura para definir um ponto de referência (o ponto de comutação do sensor) no curso do objeto.
De acordo com a curva de densidade de fluxo magnético versus distância na Figura 5, uma dada densidade de fluxo magnético pode ser produzida por dois deslocamentos diferentes. É por isso que o arranjo acima é geralmente usado em aplicações onde a estrutura mecânica limita o final do curso do objeto de uma forma que a troca do sensor pode acontecer apenas em um determinado deslocamento. Isso evita qualquer ambigüidade na interpretação dos resultados.
Aumento do gradiente da curva de Gauss versus curva de distância
Discutimos acima que um sensor de efeito Hall digital (LIGADO / DESLIGADO) pode ser usado com a configuração deslizante para definir um ponto de referência no curso do objeto. Se pudéssemos aumentar a inclinação da curva de Gauss versus distância, poderíamos detectar o ponto de referência com mais precisão.
Com uma inclinação maior, um determinado deslocamento leva a uma mudança maior na intensidade do campo magnético que pode ser detectada mais facilmente pelo sensor. A Figura 6 (a) mostra um sistema magnético que apresenta uma inclinação maior do que a configuração da Figura 2 (a).
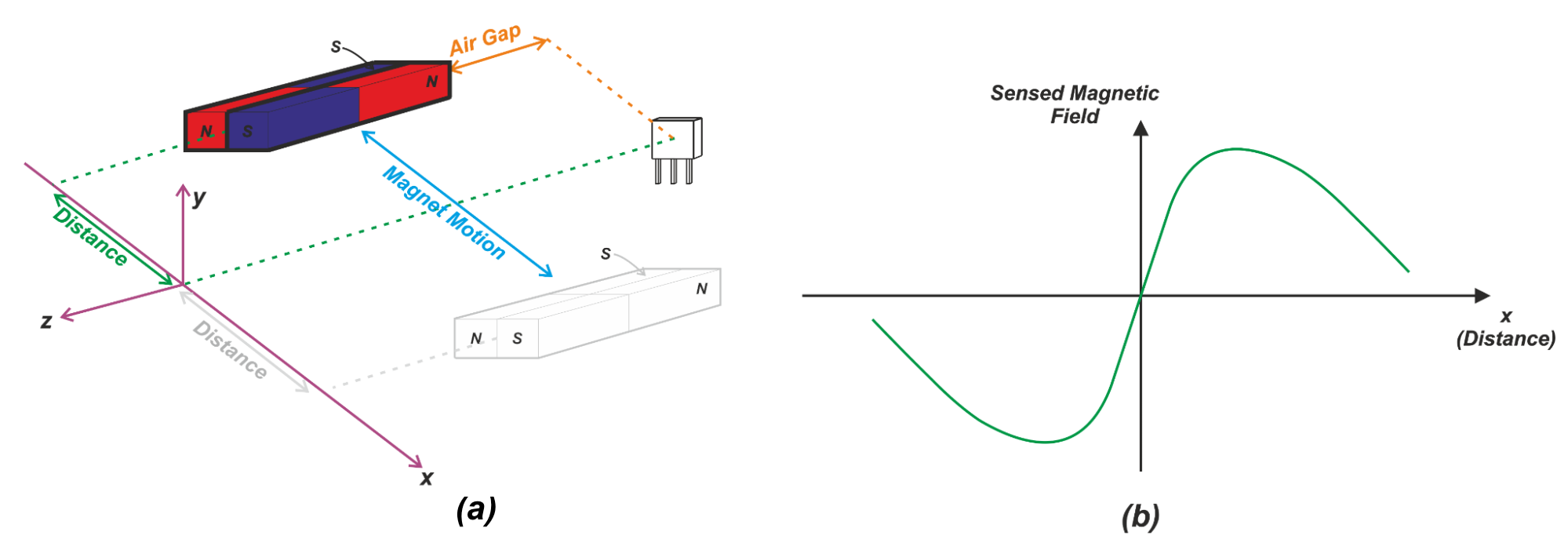
Figura 6. Usando vários ímãs para aumentar a resolução de intensidade de campo
Nesse caso, os pólos norte e sul de um par de ímãs são movidos em relação ao sensor. O campo geral é determinado pelas linhas de campo de ambos os ímãs. Neste arranjo, a distância é medida em relação ao centro do par de ímãs. A Figura 6 (b) mostra o componente z do campo magnético detectado em função da distância. Na posição central (x =0), o número de linhas de campo do pólo norte de um ímã que passa pelo sensor é igual ao número de linhas de campo do pólo sul do outro ímã. Conseqüentemente, a densidade do fluxo magnético líquido é zero.
Suponha que movamos o ímã para a direita da posição central (x> 0). Isso aumenta abruptamente o número de linhas de campo do pólo sul e cria um campo magnético com um componente z positivo. Da mesma forma, conforme movemos o ímã para a esquerda da posição central (x <0), obtemos um campo magnético relativamente forte com um componente z negativo. Em torno da origem, o gradiente da curva é maior do que a configuração slide-by na Figura 2 (a) porque a transição dos pólos norte para o sul ocorre de forma abrupta. Esta inclinação relativamente maior da curva de Gauss versus distância pode nos ajudar a definir a posição de referência de um objeto em movimento com mais precisão.
Existem duas outras variantes interessantes dessa configuração deslizante. Uma versão separa os dois ímãs por uma pequena distância fixa. Isso nos permite ter uma transição menos abrupta dos pólos norte para sul e, portanto, ajustar a inclinação da resposta em torno da origem. Outra versão usa uma combinação de três ímãs. Isso pode criar uma resposta simétrica com grandes inclinações em qualquer direção. Uma resposta simétrica pode ser útil ao detectar o desvio de uma linha central. Para saber mais sobre essas duas configurações, consulte o manual “Sensor de efeito Hall e aplicações” da Honeywell.
Para ver uma lista completa dos meus artigos, visite esta página.
Dispositivos de efeito Hall digital (ON / OFF):interruptores e travas
Projeto magnético de efeito Hall:Configurações frontais e deslizantes
Sensor
- Sensor de posição do acelerador - Princípio de funcionamento e aplicações
- Eletrônica do futuro:plataforma de desenvolvimento rápido para imagens térmicas e detecção de infravermelho
- ADI:impedância e potenciostato AFE para detecção biológica e química
- Infineon lança sensor Hall linear monoliticamente integrado para sistemas ASIL D
- Ambarella, Lumentum e ON Semiconductor colaboram na detecção 3D baseada em processamento de IA para dispositivos AIoT de última geração
- Materiais de detecção suave e autocura para mãos e braços robóticos
- Mesa redonda executiva:detecção e IIoT
- Dispositivos fotônicos baseados em grafeno para sensoriamento remoto
- Conexões para Controle:Interfaces de Comunicação para Sensores de Posição e Movimento
- Detecção de campos magnéticos