


Uma analogia para feedback dividido
Uma analogia útil para compreender circuitos amplificadores de feedback divididos é a de uma alavanca mecânica, com o movimento relativo das extremidades da alavanca representando a mudança nas tensões de entrada e saída, e o fulcro (ponto de pivô) representando a localização do ponto de aterramento, real ou virtual.
Considere, por exemplo, o seguinte circuito de amplificador operacional não inversor. Sabemos da seção anterior que o ganho de tensão de uma configuração de amplificador não inversor nunca pode ser menor que a unidade (1). Se desenharmos um diagrama de alavanca próximo ao esquema do amplificador, com a distância entre o fulcro e as extremidades da alavanca representativa dos valores do resistor, o movimento da alavanca significará mudanças na tensão nos terminais de entrada e saída do amplificador:
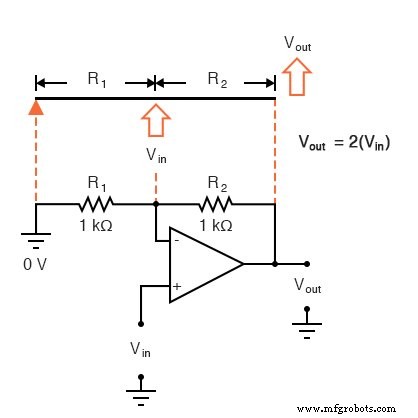
Os físicos chamam esse tipo de alavanca, com a força de entrada (esforço) aplicada entre o fulcro e a saída (carga), uma terceira classe alavanca. É caracterizado por um deslocamento de saída (movimento) pelo menos tão grande que o deslocamento de entrada - um “ganho” de pelo menos 1 - e na mesma direção. Aplicar uma tensão de entrada positiva a este circuito do amplificador operacional é análogo a deslocar o ponto de "entrada" na alavanca para cima:
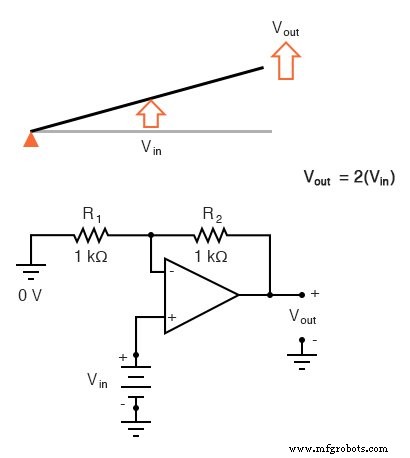
Devido às características de amplificação de deslocamento da alavanca, o ponto de "saída" se moverá duas vezes até o ponto de “entrada”, e na mesma direção. No circuito eletrônico, a tensão de saída será igual ao dobro da entrada, com a mesma polaridade. Aplicar uma tensão de entrada negativa é análogo a mover a alavanca para baixo de seu nível de posição "zero", resultando em um deslocamento de saída amplificado que também é negativo:
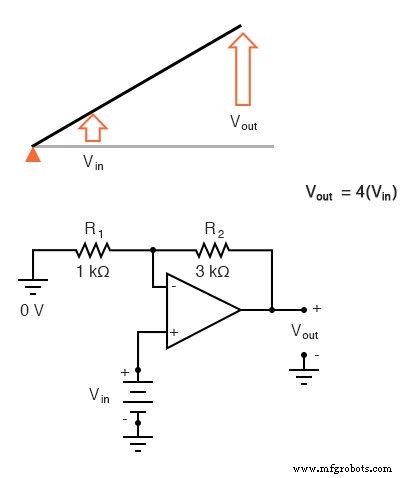
Se alterarmos a relação do resistor R 2 / R 1 , mudamos o ganho do circuito do amplificador operacional. Em termos de alavanca, isso significa mover o ponto de entrada em relação ao fulcro e à extremidade da alavanca, o que da mesma forma altera o “ganho” de deslocamento da máquina:
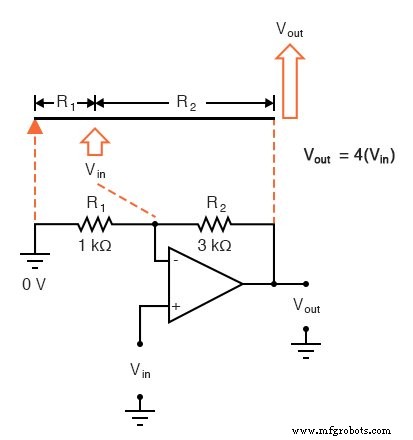
Agora, qualquer sinal de entrada será amplificado por um fator de quatro em vez de por um fator de dois:
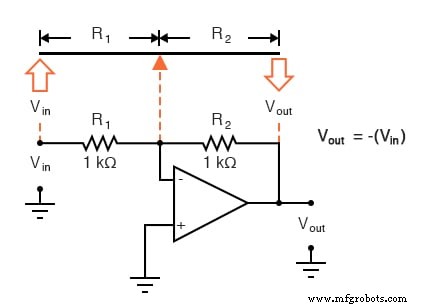
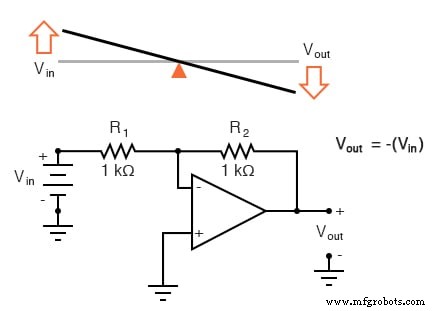
A inversão dos circuitos do amplificador operacional também pode ser modelada usando a analogia da alavanca. Com a configuração de inversão, o ponto de aterramento do divisor de tensão de feedback é a entrada inversora do amplificador operacional com a entrada à esquerda e a saída à direita. Isso é mecanicamente equivalente a uma primeira classe alavanca, onde a força de entrada (esforço) está no lado oposto do fulcro da saída (carga):
Com resistores de valor igual (comprimentos iguais de alavanca em cada lado do fulcro), a tensão de saída (deslocamento) será igual em magnitude à tensão de entrada (deslocamento), mas da polaridade oposta (direção). Uma entrada positiva resulta em uma saída negativa:
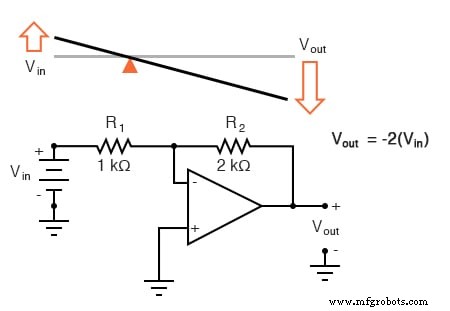
Alterando a relação do resistor R 2 / R 1 muda o ganho do circuito do amplificador, assim como mudar a posição do fulcro na alavanca muda seu "ganho" de deslocamento mecânico. Considere o seguinte exemplo, onde R 2 é feito duas vezes maior que R 1 :
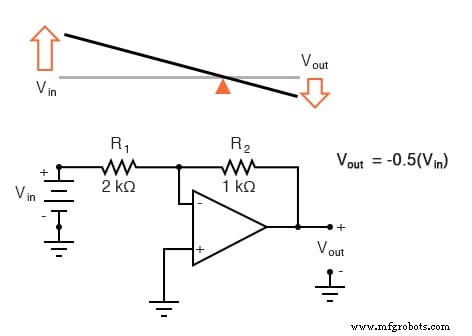
Com a configuração do amplificador inversor, porém, ganhos menores que 1 são possíveis, assim como com alavancas de primeira classe. Invertendo R 2 e R 1 valores é análogo a mover o fulcro para sua posição complementar na alavanca:um terço do caminho a partir da extremidade de saída. Lá, o deslocamento de saída será metade do deslocamento de entrada:
Tecnologia industrial
- Feedback negativo
- Uma entrada analógica isolada para Arduino
- PCBs para ambientes agressivos
- Projeto para fabricação de PCBs
- Fabricação de PCB para 5G
- Entrada externa para valores programados
- Como se preparar para a Indústria 4.0
- 4 metas para gerenciamento de ativos
- Materiais para componentes de Invar 36
- Terminologias para usinagem de precisão