


O que é um controlador PID? Seus tipos, funcionamento e aplicações
Controladores PID – O que são e como funcionam?
Controlador PID é um algoritmo de controle mais comum usado em automação industrial e aplicações e mais de 95% dos controladores industriais são do tipo PID. Os controladores PID são usados para controle mais preciso e preciso de vários parâmetros.
Na maioria das vezes, eles são usados para a regulação de temperatura, pressão, velocidade, vazão e outras variáveis do processo. Devido ao desempenho robusto e simplicidade funcional, eles foram aceitos por enormes aplicações industriais onde um controle mais preciso é o principal requisito. Vamos ver como o controlador PID funciona ?
- Post relacionado:O que é Sistema de Controle Distribuído (DCS)?

O que é um controlador PID?
Uma combinação de ações proporcionais, integrais e derivadas é mais comumente referida como ação PID e daí o nome, PID (Proporcional-Integral-Derivativo) controlador . Esses três coeficientes básicos são variados em cada controlador PID para aplicação específica, a fim de obter uma resposta ideal.
Ele obtém o parâmetro de entrada do sensor que é referido como variável de processo real. Ele também aceita a saída desejada do atuador, que é referida como variável definida e, em seguida, calcula e combina as respostas proporcionais, integrais e derivadas para calcular a saída para o atuador.
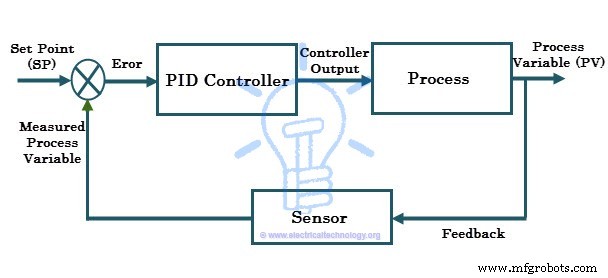
Considere o sistema de controle típico mostrado na figura acima, no qual a variável de processo de um processo deve ser mantida em um nível específico. Suponha que a variável do processo seja a temperatura (em graus centígrados). Para medir a variável de processo (ou seja, temperatura), um sensor é usado (digamos um RTD).
Um ponto de ajuste é a resposta desejada do processo. Suponha que o processo tenha que ser mantido a 80 graus centígrados e, então, o ponto de ajuste seja 80 graus centígrados. Suponha que a temperatura medida do sensor seja de 50 graus centígrados (que nada mais é do que uma variável de processo), mas o ponto de ajuste de temperatura é de 80 graus centígrados.
Este desvio do valor real do valor desejado no algoritmo de controle PID faz com que a saída para o atuador (aqui é um aquecedor) dependendo da combinação de proporcional, integral e respostas derivadas. Assim, o controlador PID varia continuamente a saída para o atuador até que a variável de processo se estabeleça no valor definido. Isso também é chamado de sistema de controle de feedback de circuito fechado .
Postagem relacionada:
- O que é AC Drive? Funcionamento e tipos de acionamentos elétricos e VFD
- O que é DC Drive? Operação e Classificação de Drives DC
Funcionamento do controlador PID
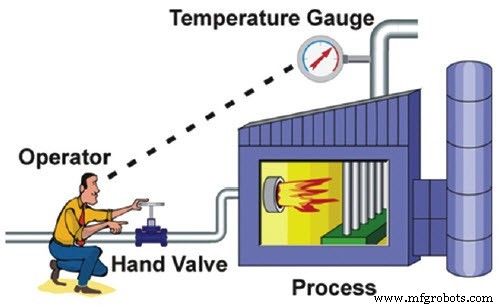
No controle manual, o operador pode ler periodicamente a variável de processo (que deve ser controlada como temperatura, vazão, velocidade, etc.) e ajustar a variável de controle (que é ser manipulado para trazer a variável de controle para os limites prescritos, como um elemento de aquecimento, válvulas de fluxo, entrada do motor, etc.). Por outro lado, no controle automático, a medição e o ajuste são feitos automaticamente de forma contínua.
Todos os controladores industriais modernos são do tipo automático (ou controladores de malha fechada), que geralmente são feitos para produzir uma ou combinação de ações de controle. Essas ações de controle incluem
- Controlador ON-OFF
- Controlador Proporcional
- Controlador Proporcional-Integral
- Controlador de derivação proporcional
- Controlador Proporcional-Integral-Derivativo
No caso do controlador LIGADO-DESLIGADO, dois estados são possíveis para controlar a variável manipulada, ou seja, totalmente LIGADO (quando a variável de processo está abaixo do set point) ou Totalmente DESLIGADO ( quando a variável de processo está acima do set point). Assim, a saída será de natureza oscilante. Para obter o controle preciso, a maioria das indústrias usa o controlador PID (ou PI ou PD depende da aplicação). Vejamos essas ações de controle.
P-Controller
Controle proporcional ou simplesmente P-controlador produz a saída de controle proporcional ao erro de corrente. Aqui o erro é a diferença entre o set point e a variável de processo (ou seja, e =SP – PV). Este valor de erro multiplicado pelo ganho proporcional (Kc) determina a resposta de saída, ou em outras palavras, o ganho proporcional decide a razão entre a resposta de saída proporcional e o valor de erro.
Por exemplo, a magnitude do erro é 20 e Kc é 4, então a resposta proporcional será 80. Se o valor do erro for zero, a saída ou resposta do controlador será zero. A velocidade da resposta (resposta transitória) é aumentada aumentando o valor do ganho proporcional Kc. No entanto, se Kc for aumentado além da faixa normal, a variável de processo começa a oscilar em uma taxa mais alta e causará instabilidade no sistema. 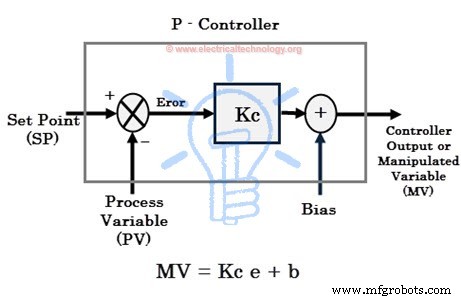
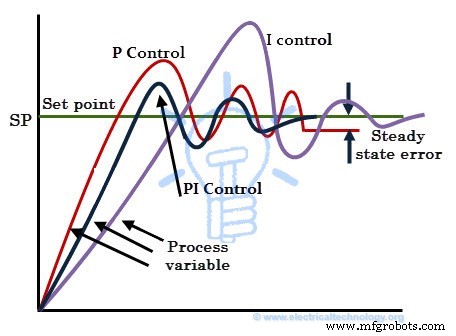
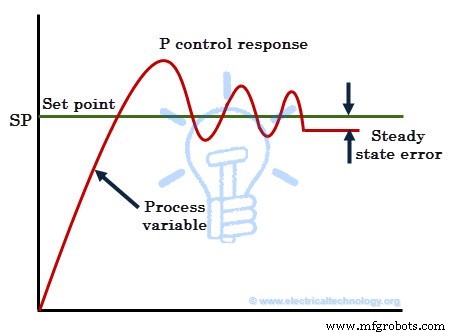 Embora o P-controller forneça estabilidade da variável de processo com boa velocidade de resposta, sempre haverá um erro entre o ponto de ajuste e a variável de processo real. Na maioria dos casos, este controlador é fornecido com reset manual ou polarização para reduzir o erro quando usado sozinho. No entanto, o estado de erro zero não pode ser alcançado por este controlador. Portanto, sempre haverá um erro de estado estacionário na resposta do controlador p, conforme mostrado na figura.
Embora o P-controller forneça estabilidade da variável de processo com boa velocidade de resposta, sempre haverá um erro entre o ponto de ajuste e a variável de processo real. Na maioria dos casos, este controlador é fornecido com reset manual ou polarização para reduzir o erro quando usado sozinho. No entanto, o estado de erro zero não pode ser alcançado por este controlador. Portanto, sempre haverá um erro de estado estacionário na resposta do controlador p, conforme mostrado na figura.
Postagens relacionadas:
- O que é Automação Industrial | Tipos de automação industrial
- Sistema de automação residencial inteligente – Circuito e código-fonte
I-Controller
- Controlador integral ou I-controlador é usado principalmente para reduzir o erro de estado estacionário do sistema. A componente integral integra o termo de erro durante um período de tempo até que o erro se torne zero. Isso resulta que mesmo um pequeno valor de erro fará com que produza uma resposta integral alta. Na condição de erro zero, ele mantém a saída para o dispositivo de controle final em seu último valor para manter o erro de estado estacionário zero, mas no caso do controlador P, a saída é zero quando o erro é zero.
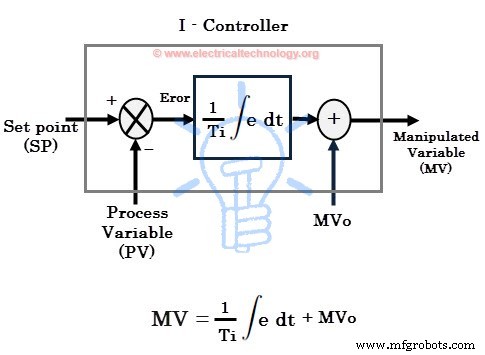
Se o erro for negativo, a resposta ou saída integral será diminuída. A velocidade de resposta é lenta (significa responder lentamente) quando o controlador I é usado sozinho, mas melhora a resposta em estado estacionário. Ao diminuir o ganho integral Ki, a velocidade da resposta é aumentada.
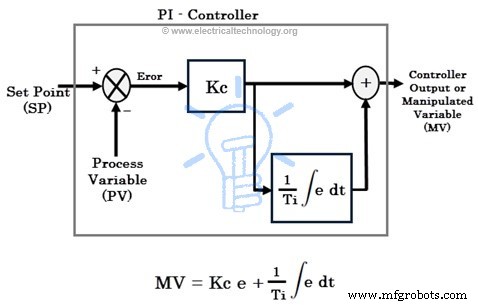
Para muitas aplicações, os controles proporcionais e integrais são combinados para obter uma boa velocidade de resposta (no caso do controlador P) e uma melhor resposta em regime permanente (no caso do controlador I). Na maioria das vezes controladores PI são usados em operação industrial para melhorar as respostas transitórias e de estado estacionário. As respostas de apenas I-control, apenas p-control e PI control são mostradas na figura abaixo .
D-Resposta do Controlador
Um controlador derivado ( ou simplesmente D-Controller) vê a rapidez com que a variável do processo muda por unidade de tempo e produz a saída proporcional à taxa de mudança. A saída derivada é igual à taxa de variação do erro multiplicada por uma constante derivada. O controlador D é usado quando a variável do processador começa a mudar em uma alta taxa de velocidade.
Nesse caso, o D-controller move o dispositivo de controle final (como válvulas de controle ou motor) na direção para neutralizar a mudança rápida de uma variável de processo. Deve-se notar que o controlador D sozinho não pode ser usado para nenhuma aplicação de controle. 
A ação derivativa aumenta a velocidade da resposta porque dá um pontapé inicial para a saída, antecipando assim o comportamento futuro do erro. O controlador D responde mais rapidamente às mudanças na variável do processo, se o termo derivativo for grande (o que é obtido aumentando a constante derivada ou o tempo Td).
Na maioria dos controladores PID, a resposta do controle D depende apenas da variável do processo, e não do erro. Isso evita picos na saída (ou aumento súbito de saída) em caso de mudança repentina do ponto de ajuste pelo operador. E também a maioria dos sistemas de controle usa menos tempo derivativo td, pois a resposta derivativa é muito sensível ao ruído na variável de processo, o que leva a uma saída extremamente alta, mesmo para uma pequena quantidade de ruído. 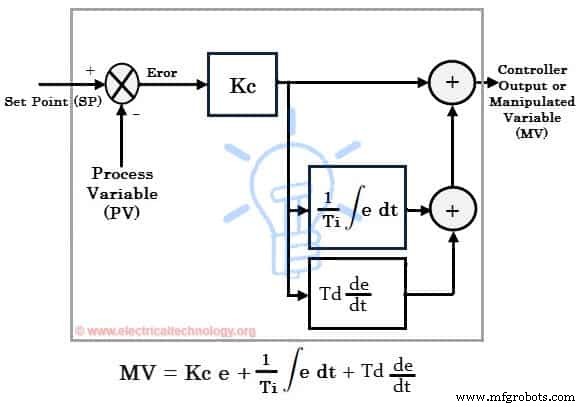
Portanto, combinando respostas de controle proporcional, integral e derivativo, um controlador PID é formado. Um controlador PID encontra aplicação universal; no entanto, deve-se conhecer as configurações do PID e ajustá-lo adequadamente para produzir a saída desejada. Tuning significa o processo de obter uma resposta ideal do controlador PID, definindo ganhos ótimos de parâmetros proporcionais, integrais e derivativos. 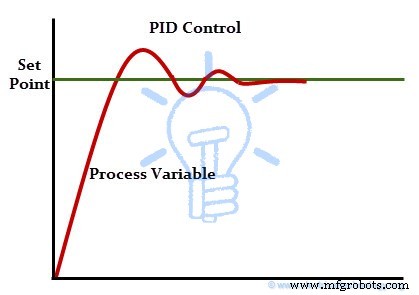
Existem diferentes métodos de ajuste do controlador PID para obter a resposta desejada. Alguns desses métodos incluem tentativa e erro, técnica de curva de reação do processo e método de Zeigler-Nichols. Mais popularmente, Zeigler-Nichols e métodos de tentativa e erro são usados.
Isto é sobre o controlador PID e seu funcionamento. Devido à simplicidade da estrutura do controlador, os controladores PID são aplicáveis a uma variedade de processos. E também pode ser ajustado para qualquer processo, mesmo sem conhecer o modelo matemático detalhado do processo. Algumas das aplicações incluem, controle de velocidade do motor baseado em controlador PID, controle de temperatura, controle de pressão, controle de fluxo, nível do líquido, etc.
Controladores PID em tempo real
Existem diferentes tipos de controladores PID disponíveis no mercado atual, que podem ser usados para todas as necessidades de controle industrial, como nível, vazão, temperatura e pressão. Ao decidir controlar tais parâmetros para um processo usando PID, as opções incluem o uso de PLC ou controlador PID autônomo.
Controladores PID autônomos são usados onde um ou dois loops são necessários para serem monitorados e controlados ou em situações de difícil acesso com sistemas maiores. Esses dispositivos de controle dedicados oferecem uma variedade de opções para controle de loop simples e duplo. Os controladores PID autônomos oferecem configurações de vários pontos de ajuste e também geram vários alarmes independentes. 
Alguns desses controladores independentes incluem controladores de temperatura Yokogava, controladores PID Honeywell, controladores PID de ajuste automático OMEGA, controladores PID ABB e controladores PID Siemens.
Na maioria das aplicações de controle, PLCs são usados como controladores PID. Os blocos PID são embutidos nos PLCs/PACs e oferecem opções avançadas para um controle preciso. Os CLPs são mais inteligentes e poderosos do que os controladores independentes e facilitam o trabalho. Cada PLC consiste no bloco PID em seu software de programação, seja Siemens, ABB, AB, Delta, Emersion ou Yokogava PLC.
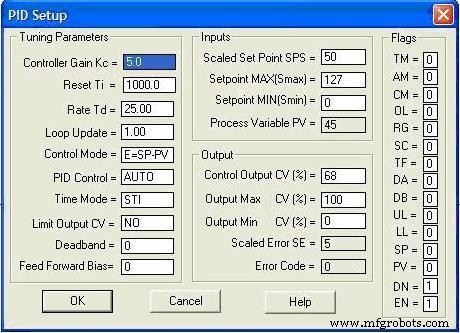
A figura abaixo mostra o bloco PID de Allen Bradley (AB) e sua janela de configuração. 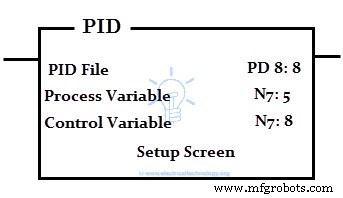
A figura abaixo mostra o bloco PID da Siemens . 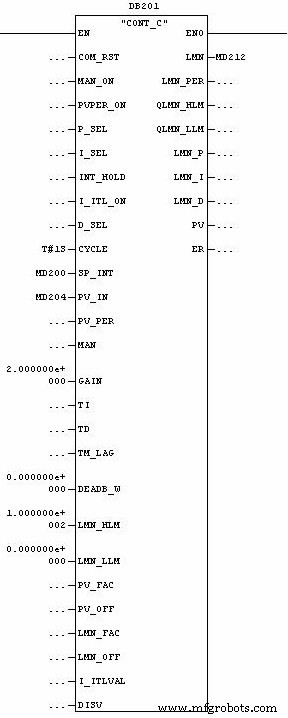
A figura abaixo mostra o controlador PID VIs oferecidos pelo conjunto de ferramentas LabVIEW PID. 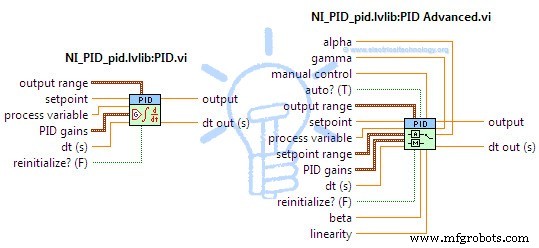
Tecnologia industrial
- O que é um sensor de distância funcionando e suas aplicações
- O que é impressão 3D? Princípio de funcionamento | Tipos | Aplicativos
- O que é usinagem a laser? - Tipos e funcionamento
- O que é Prototipagem Rápida? - Tipos e Funcionamento
- O que é manufatura aditiva? - Tipos e funcionamento
- O que é Brochar? - Processo, Trabalho e Tipos
- O que é soldagem a laser? - Trabalho, tipos e aplicação
- O que é soldagem por resistência? - Tipos e funcionamento
- O que é Jig Boring Machine? - Tipos e funcionamento
- O que é extrusão? - Trabalho, tipos e aplicação