


Construa um Battle Bot controlado com um controlador PS2
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Ferramentas e máquinas necessárias
| ||||
|
Aplicativos e serviços online
 |
|
Sobre este projeto
Criamos robôs de batalha usando o Arduino UNO e outras peças acessíveis. Esses robôs de batalha foram feitos em um clube de robótica para alunos do 5º ao 8º ano na Trivium Personalized Learning Public Charter School. Foi uma maneira divertida de as crianças aprenderem sobre o Arduino e a robótica.
Visualize "ESQUEMAS" para ver os diagramas visuais de como tudo está conectado. Existem diagramas para a placa do motor, blindagem do sensor, controlador PS2 e também um motor adicional conectado a uma placa de pão para um inversor / girador. O flipper / spinner é programado para ativar quando o botão X é pressionado no controlador PS2.
Tentamos usar suprimentos acessíveis e demos às crianças liberdade criativa sobre como projetar seus robôs de batalha. Usamos peças que não precisavam de solda, tornando a montagem mais fácil para os iniciantes.
Coroplasto
O Coroplast foi usado para construir os corpos. É acessível, mais resistente do que papelão e bastante fácil de cortar e dobrar.
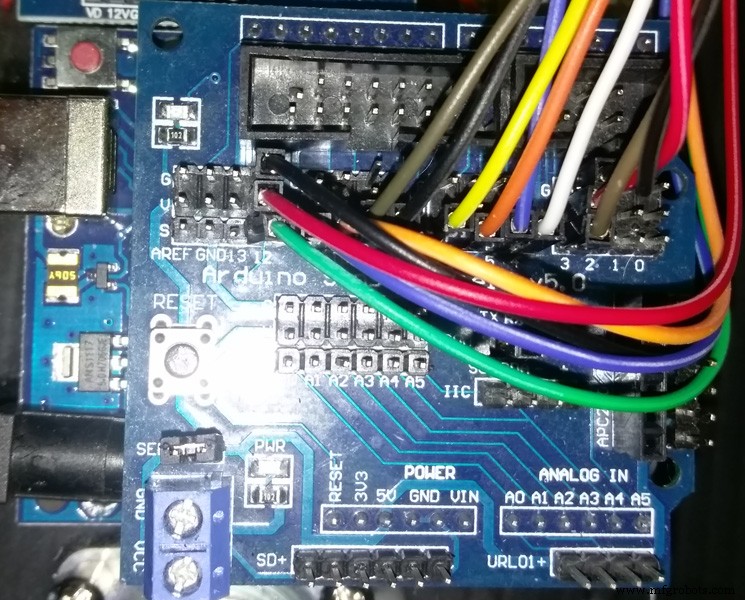
Arduino UNO e proteção do sensor
Usamos a proteção do sensor UNO R3 para que as crianças pudessem conectar as peças com mais facilidade. Você coloca esse escudo em cima do Arduino e ele está pronto para ser usado.
Placa de controle do motor
Usamos esta proteção do driver do motor para tornar mais fácil para as crianças conectarem seus motores.
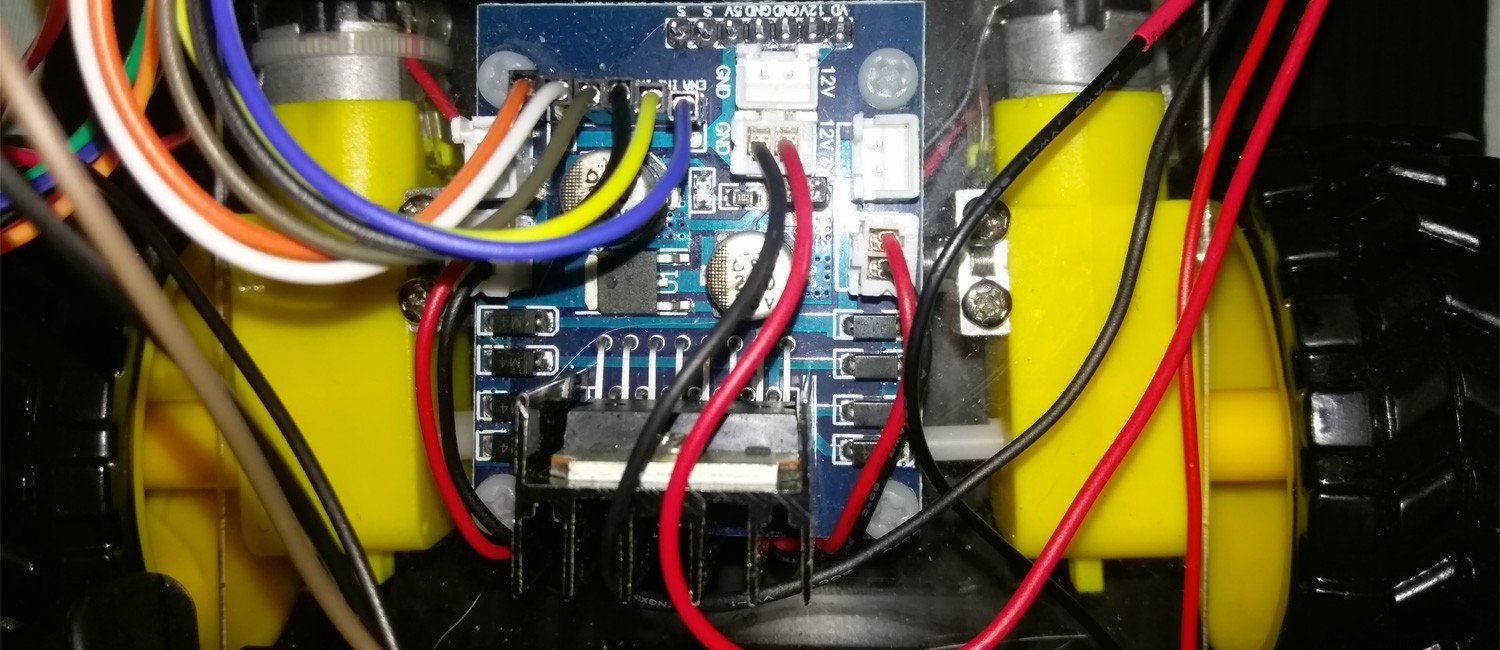
Para economizar custos, fizemos nossos bots 2WD com 2 motores traseiros e uma roda frontal giratória. A blindagem do driver do motor suporta 4WD, portanto, você pode facilmente montar mais 2 motores para a frente.
Estojo de bateria 18650
Escolhemos esses gabinetes de bateria porque eles tinham cabos de 6 ", facilitando a conexão ao Arduino.
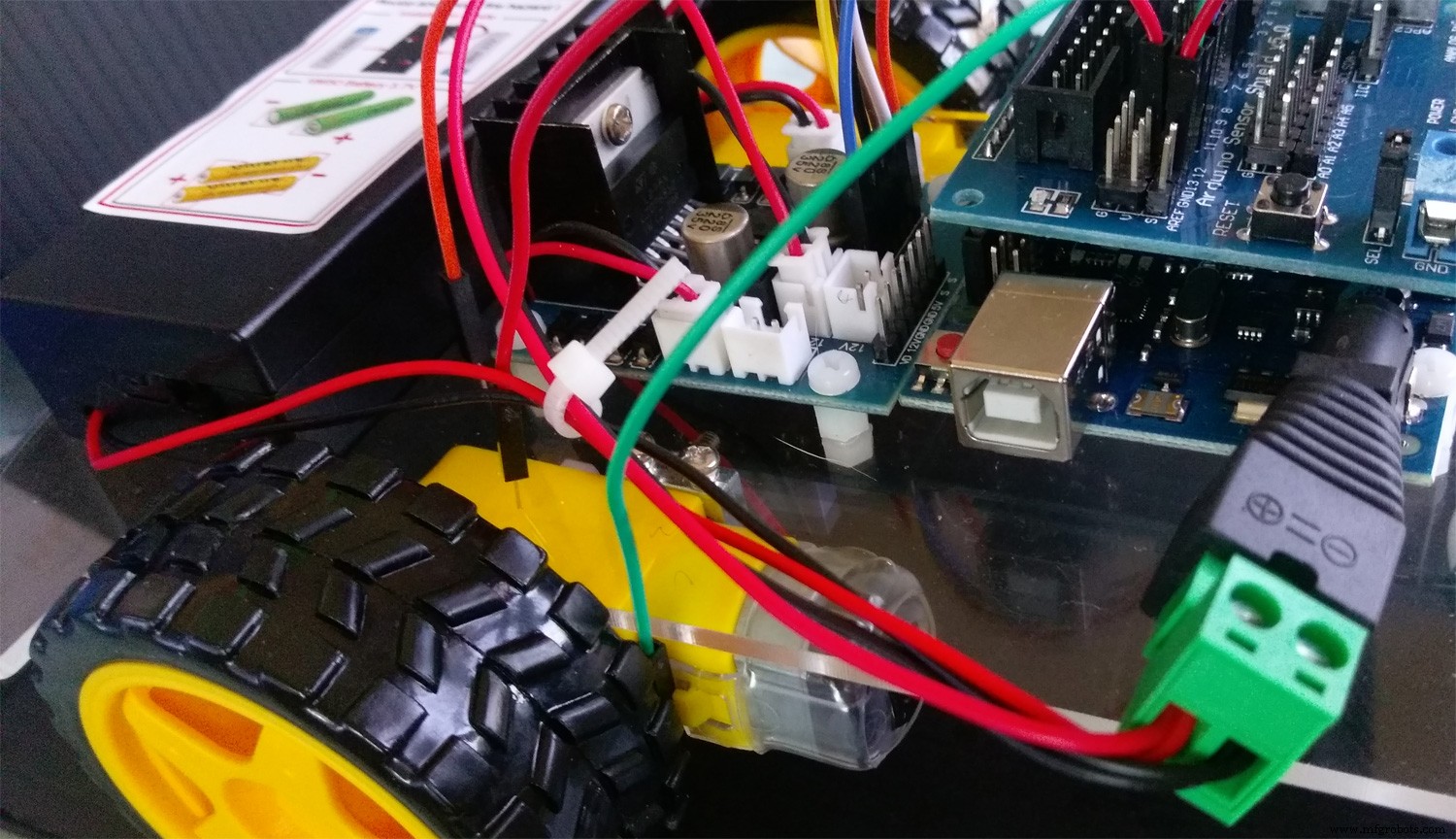
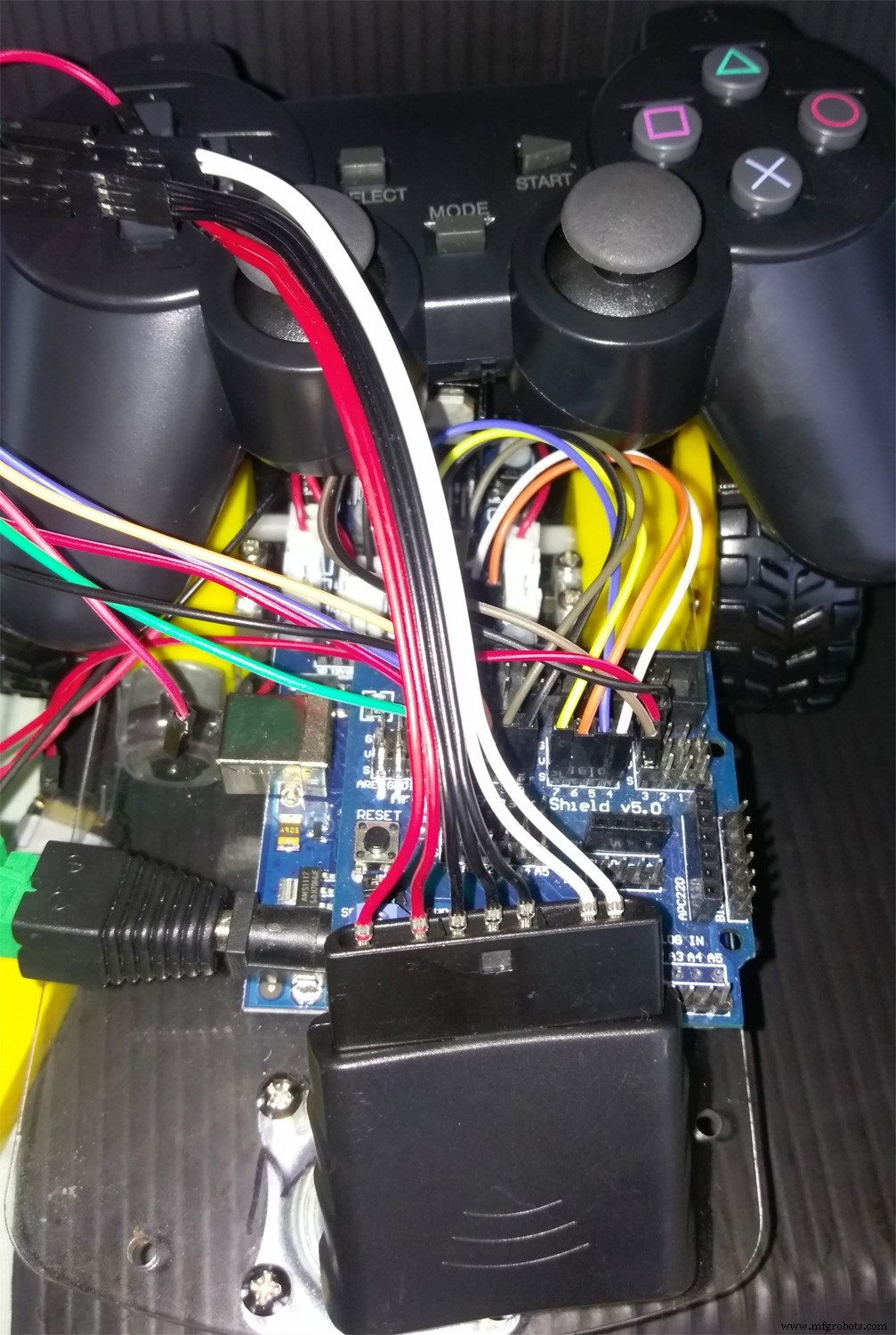
Controlador PS2
Também conectamos os bots a um controlador PS2 conectado por Bluetooth.
Existem tutoriais que irão ensiná-lo a modificar um controlador PS2 existente para usar com seu bot, mas usamos um que adquirimos no eBay que já foi modificado. Há um link para este controlador em componentes e suprimentos.
Outros suprimentos
Também utilizamos fios jumper (macho / macho e fêmea / macho), fita adesiva, parafusos, porcas, parafusos, buchas de madeira, fita dupla-face e fita velcro para a montagem das peças.
Além disso, imprimimos em 3D algumas peças personalizadas que foram usadas para aletas, spinners e conectores de motor. Existem links para os arquivos STL de um dos spinners e dos conectores do motor em "PEÇAS E COMPARTIMENTOS PERSONALIZADOS".
Foi muito divertido construir esses robôs de batalha! Adoramos ver alguns dos conceitos que as crianças criaram usando os suprimentos limitados que receberam. Foi ótimo ver o progresso que eles fizeram enquanto testavam seus bots em batalha e faziam alterações com base em onde viam as fraquezas.

Vídeos de batalha
- Veja fiação e diagramas aqui
- Baixe o código aqui
- Baixe as peças impressas em 3D aqui
- Obtenha uma lista de peças usadas aqui
Código
Battlebot com controlador PS2
Código que permite controlar o robô de batalha com um controlador PS2Peças personalizadas e gabinetes
Este é um spinner impresso em 3D que um dos alunos criou e que foi acoplado a um dos motores. É ativado quando o botão do controlador X do PS2 é pressionado. Esta é uma peça de conector impressa em 3D que usamos para prender às extremidades dos motores para que pudéssemos conectar facilmente os pinos.12 embalagem da peça de conector impressa em 3D que usamos para anexar às extremidades dos motores. Use-o se quiser imprimir muitos deles para uma classe, caso contrário, use o Conector do motor - Peça única .stl para imprimir apenas 1.Esquemas
Esta é a fiação para a placa do motor. Mostra como os motores são conectados à placa do motor e também como os fios são conectados da placa do motor à blindagem do sensor.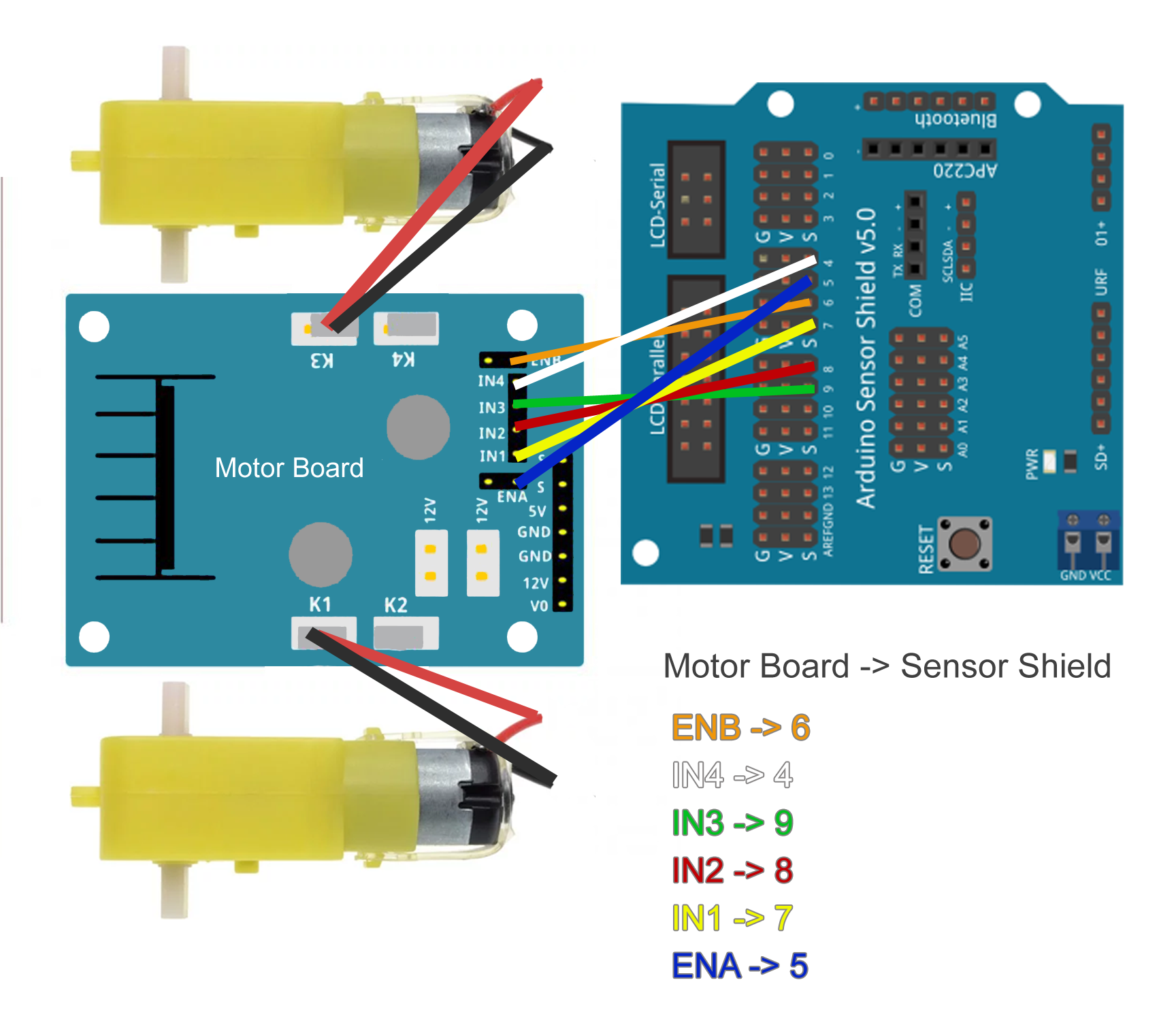 Diagrama que mostra como conectar a fiação do bluetooth à blindagem do sensor.
Diagrama que mostra como conectar a fiação do bluetooth à blindagem do sensor. 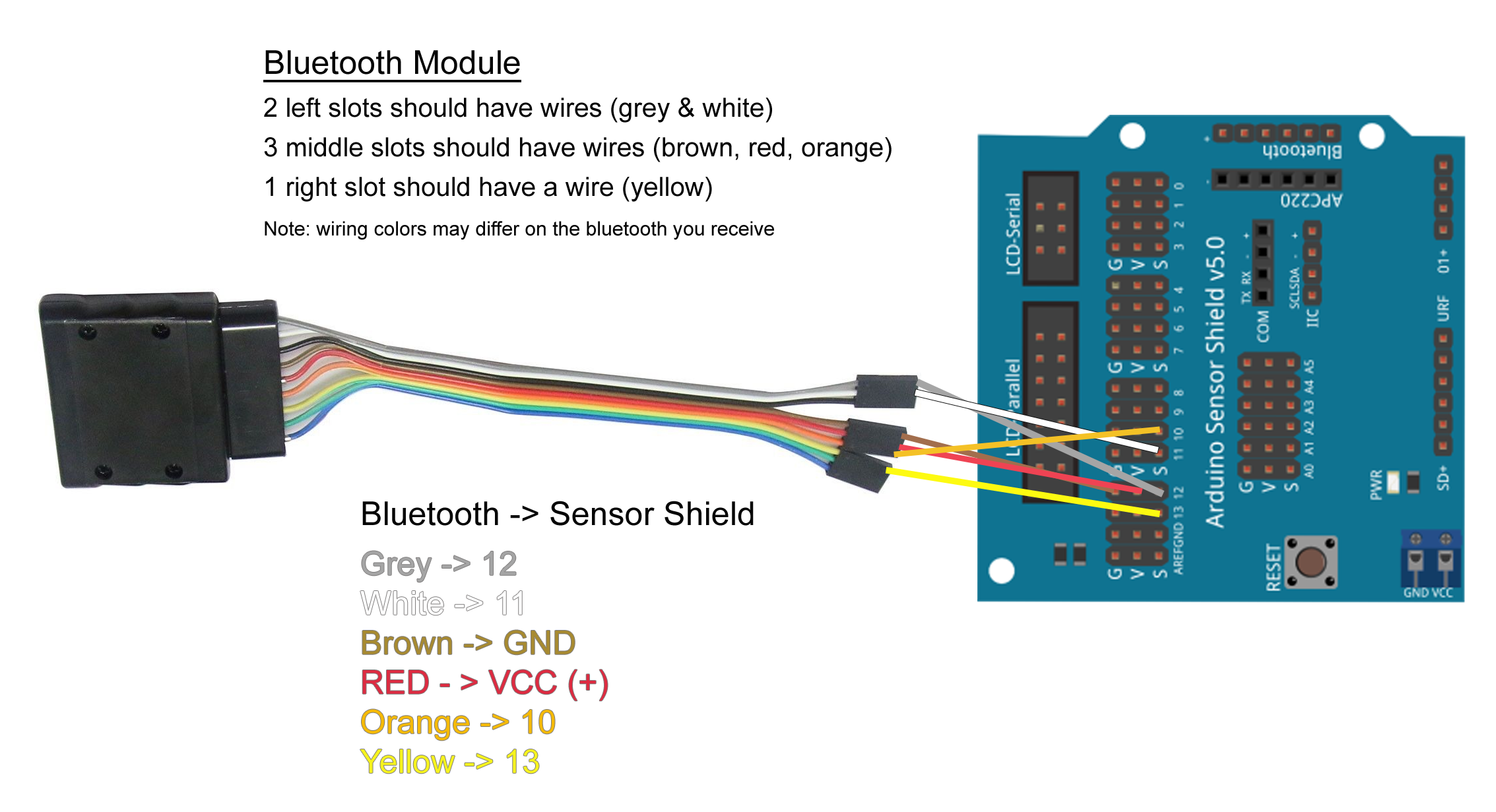 Este é um motor extra que foi adicionado para ativar uma palheta quando o botão PS2 X é pressionado.
Este é um motor extra que foi adicionado para ativar uma palheta quando o botão PS2 X é pressionado. 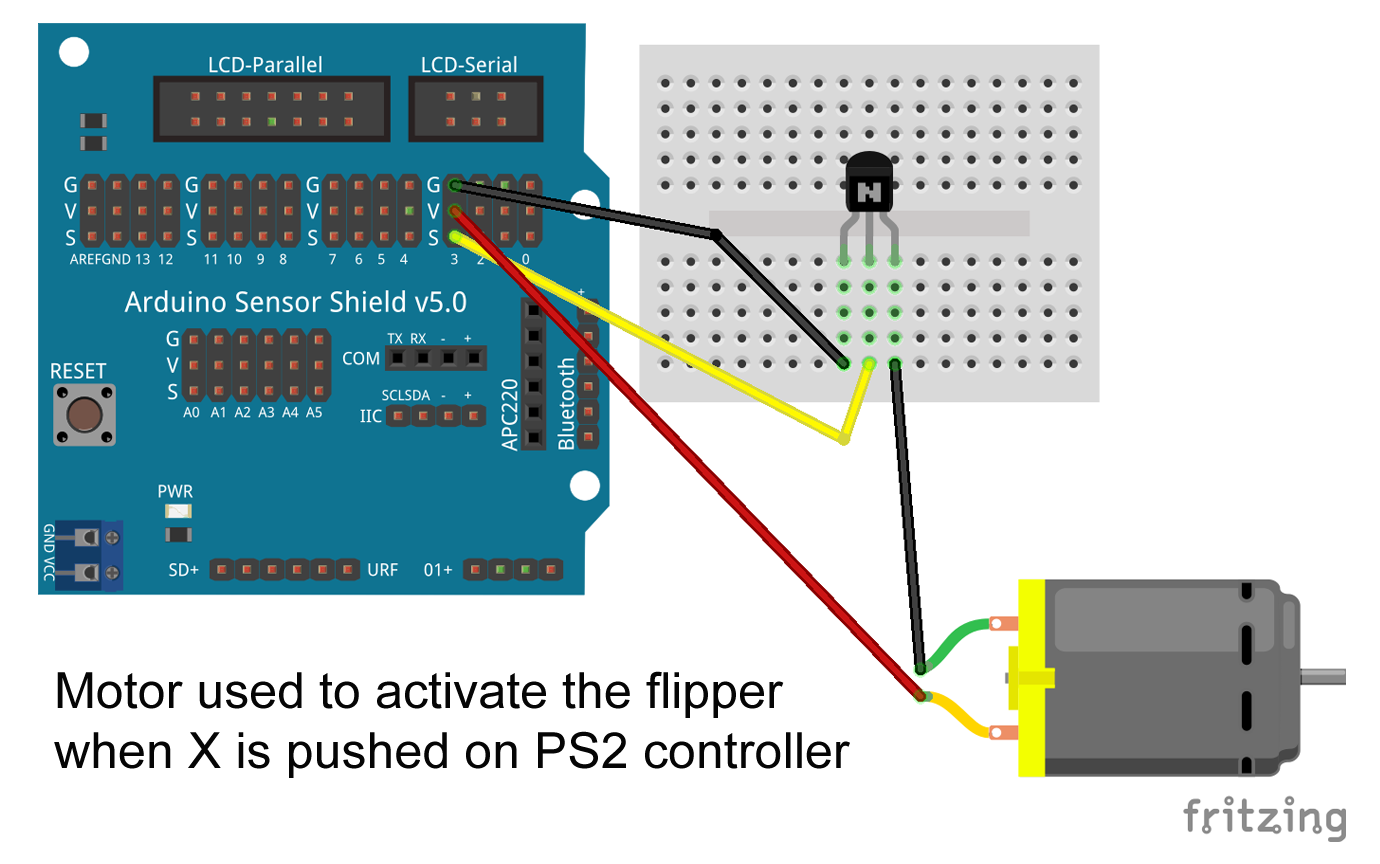
Matriz de teclado de prototipagem de 64 teclas para Arduino
Monitor de qualidade do ar Arduino com sensor DSM501A
Processo de manufatura
- Controlador Smart Home de 433 MHz com Sensorflare e RaspberryPi
- Controlador de irrigação Win10 IOT com sensores de umidade
- Usando o PSoC 6 Pioneer Board com o Pioneer IoT Add-on Shield
- Construa seu robô de streaming de vídeo controlado pela Internet com Arduino e Raspberry Pi
- Compilação de boneca Squid Games usando Arduino UNO
- Controlador DMX operado pela web
- Relógio Arduino com horas de oração islâmica
- Unopad - Controlador Arduino MIDI com Ableton
- Controle de ventilador PWM de 4 pinos de 25 kHz com Arduino Uno
- Builds de vários estágios com contêiner