


Carro controlado por Bluetooth
Componentes e suprimentos
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Aplicativos e serviços online
 |
|
Sobre este projeto
Olá!
Tudo o que pode ser controlado é ótimo. Não é? Nós, humanos, amamos controlar as coisas e é por isso que a automação e a robótica são tão fascinantes.
Este tutorial irá ensiná-lo a criar seu próprio carro controlado por Bluetooth. Então vamos começar.
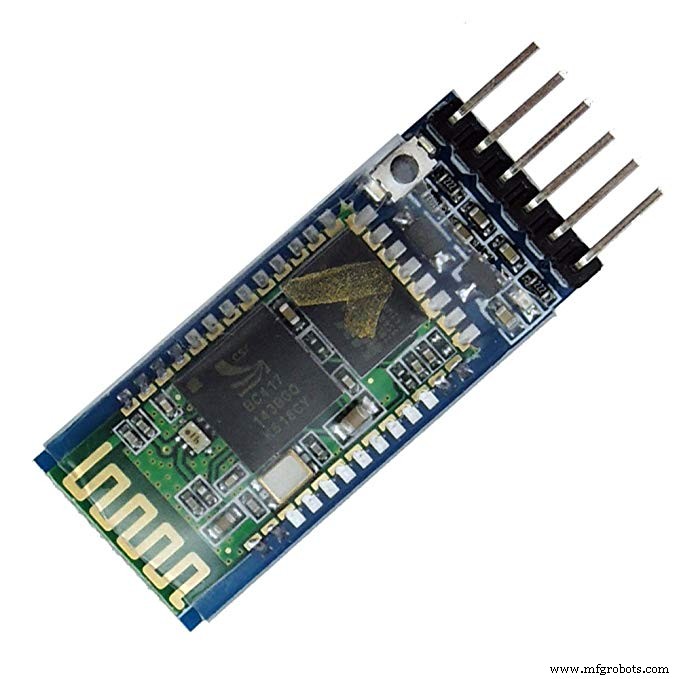
Este será um carro controlado por Bluetooth, portanto, para este projeto, usaremos o módulo HC-05 Bluetooth para receber os pacotes de dados de controle.
Também precisaremos de um aplicativo Android que enviará os pacotes de dados de controle para o módulo Bluetooth. Usaremos um aplicativo de terceiros (clique aqui para fazer o download) para esse fim.
- -> Ok pessoal! Vamos construir o hardware.
- -> Carroceria do carro.
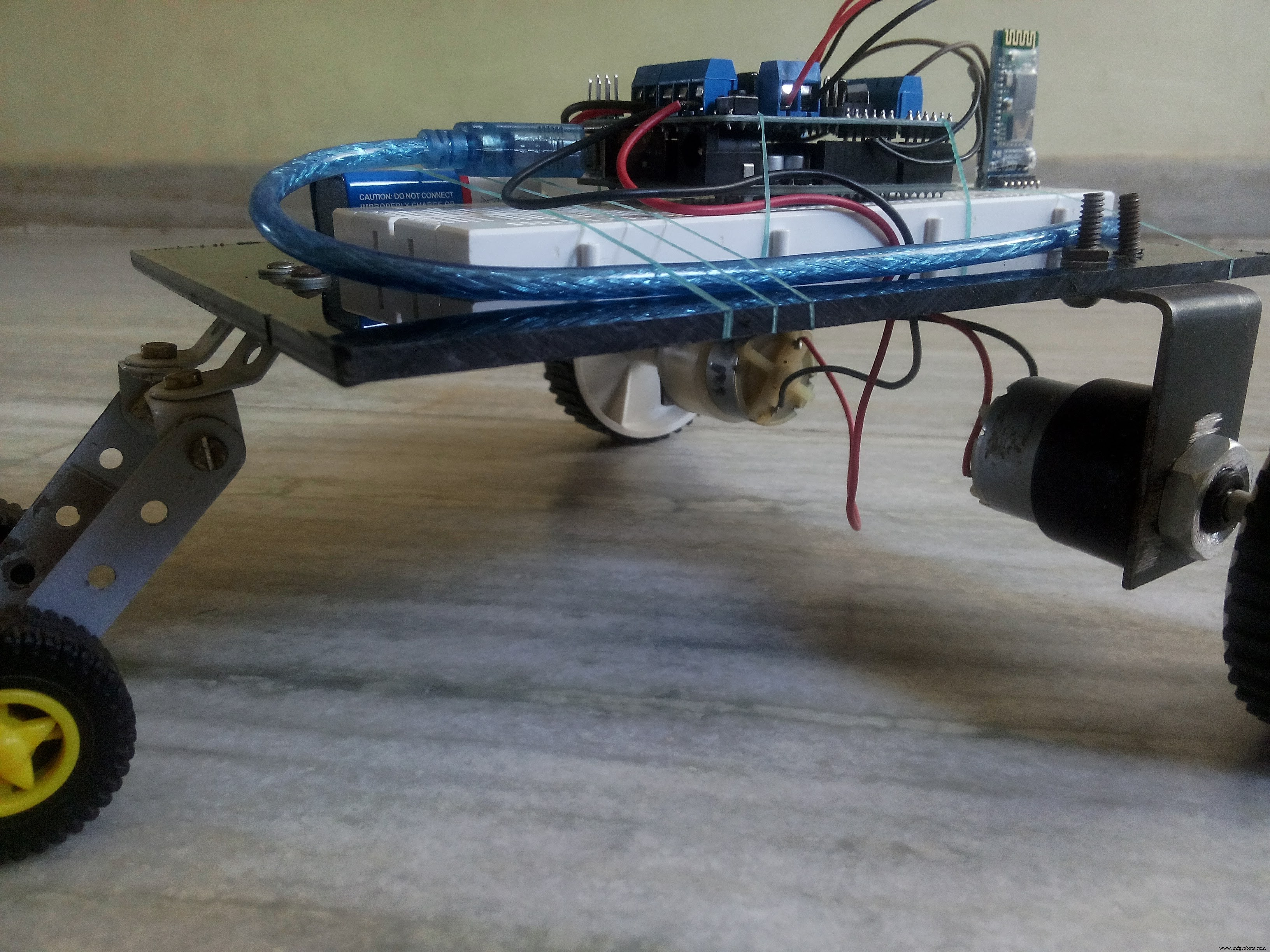
O carro que estamos construindo para este projeto será um carro duplo. Usei dois motores CC de 12 V 200 rpm. Você pode usar um chassi pronto. Usei uma folha de PVC como chassi.
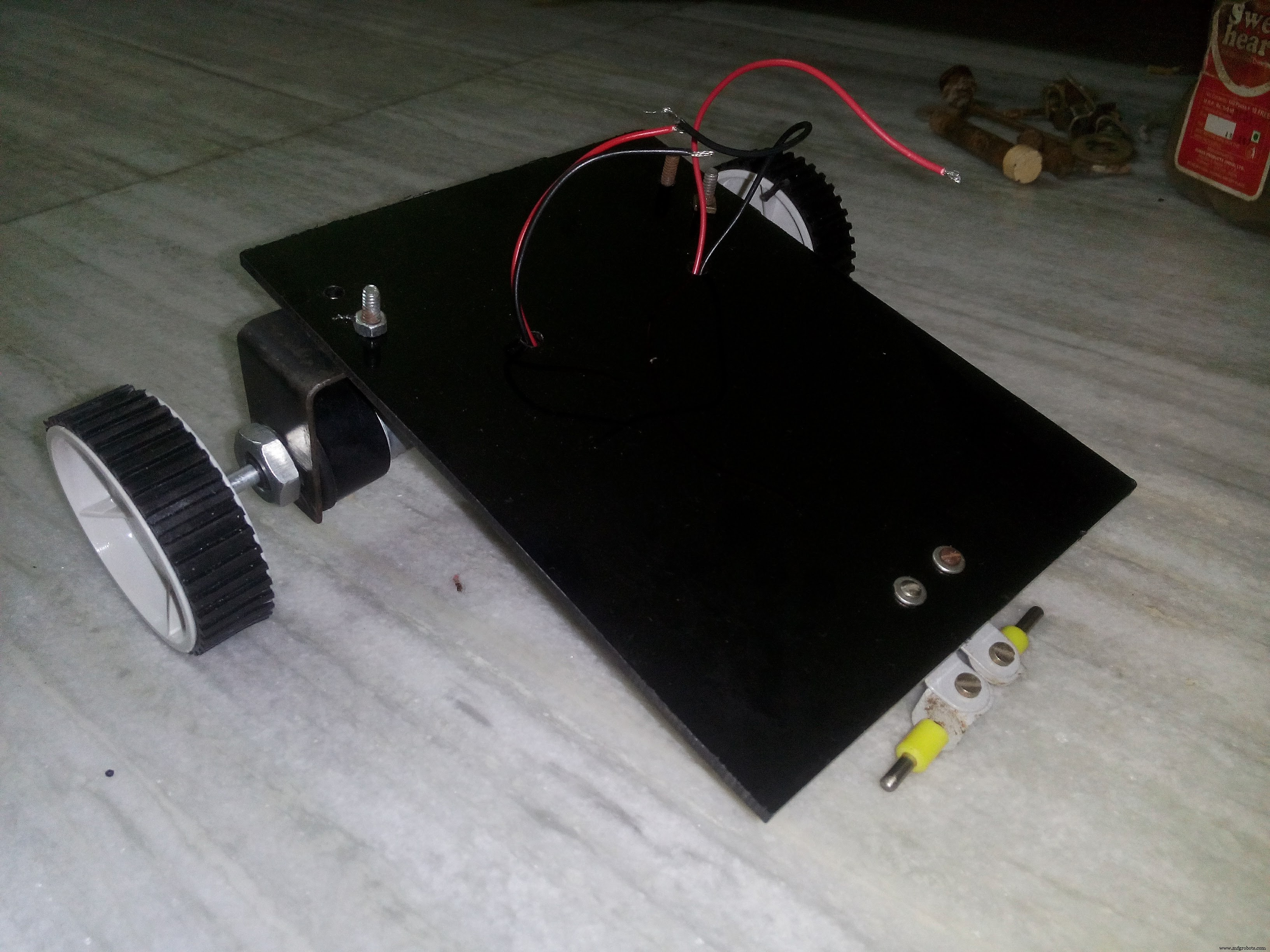
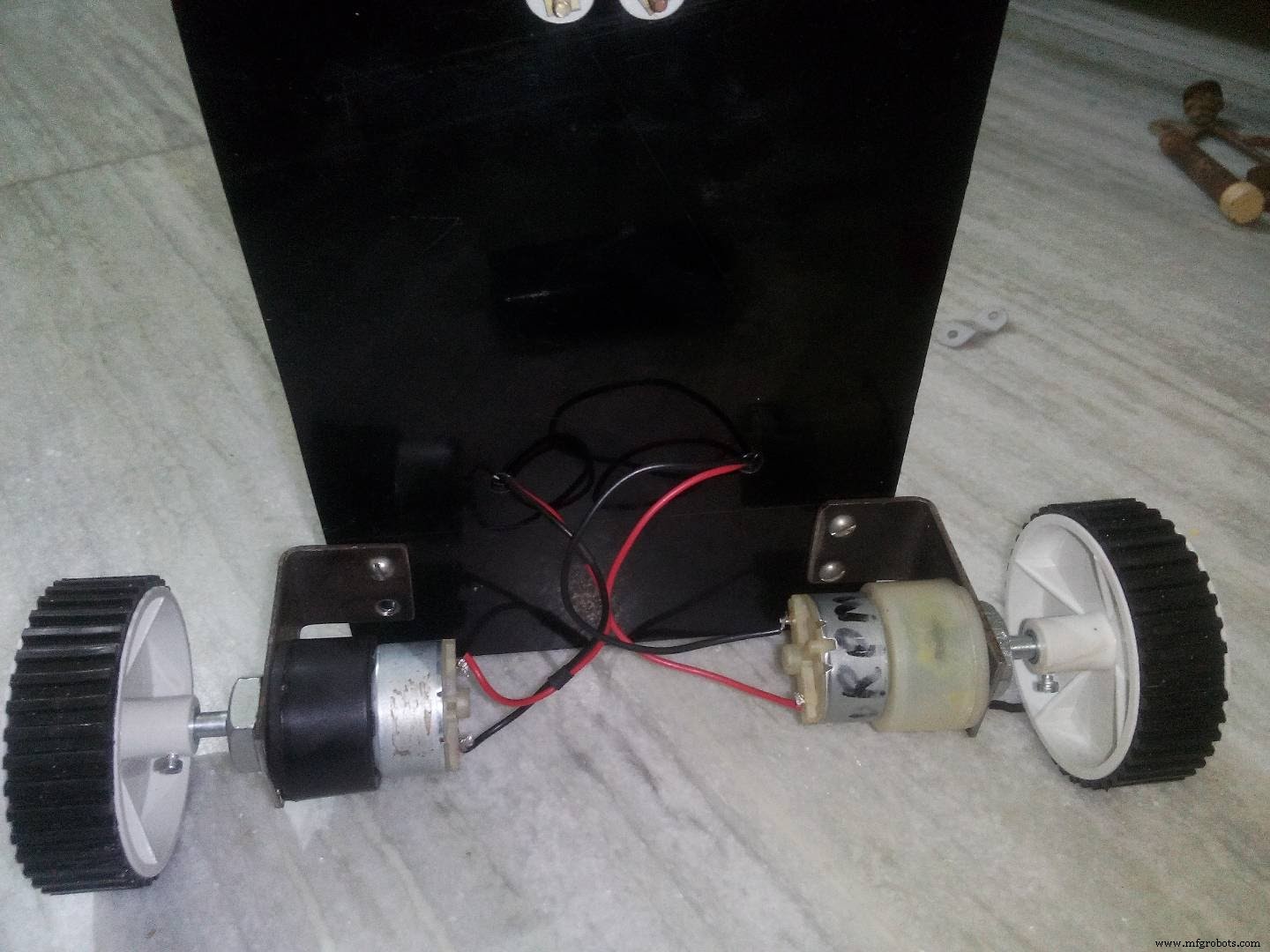
Assim, a estrutura básica do nosso carro está pronta. Você pode usar este projeto ou desenvolver seu próprio projeto, mas lembre-se de manter o peso o mais baixo possível, pois este é um projeto de dois motores.
-> Circuito
Agora vamos construir o circuito
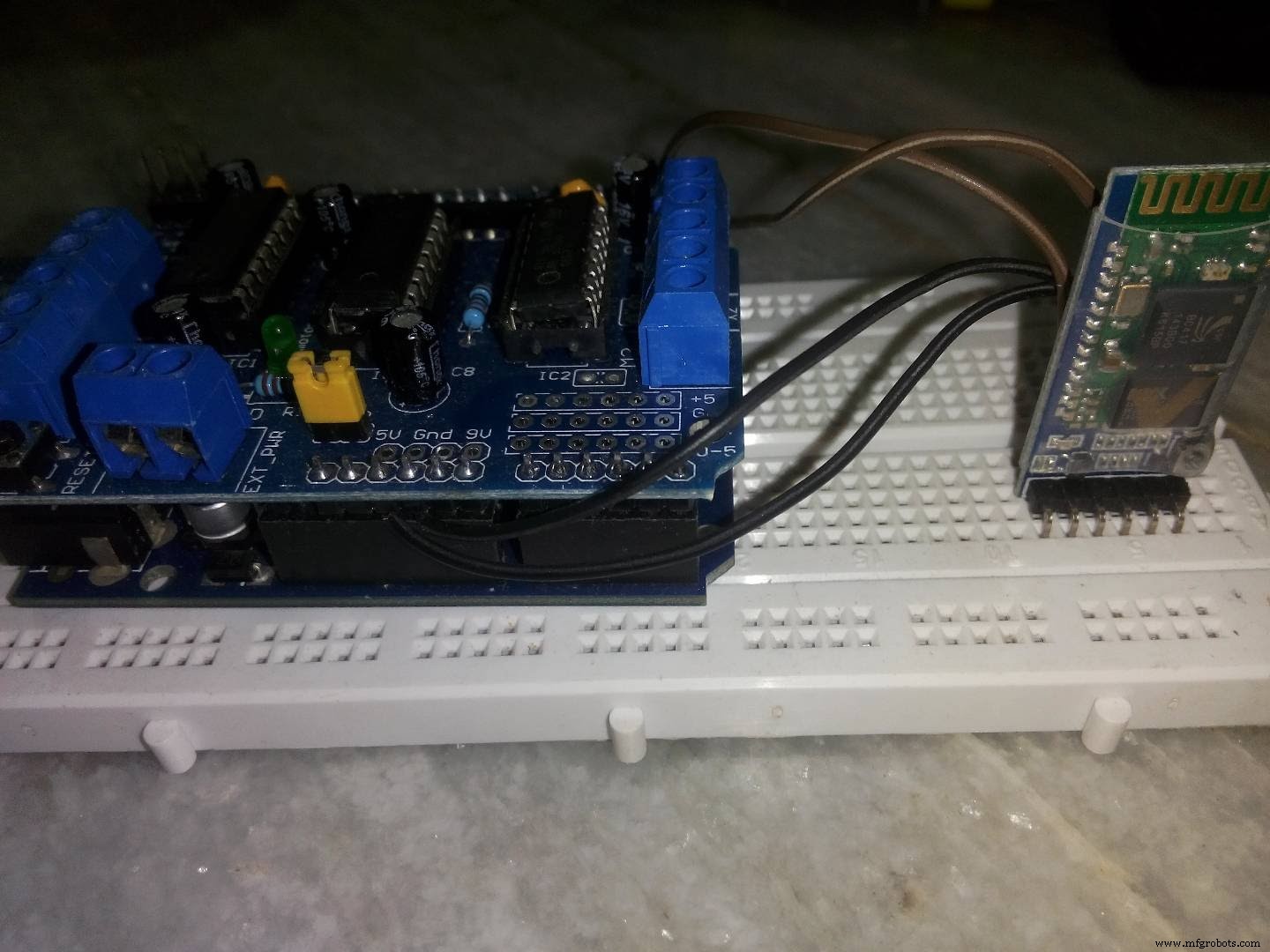
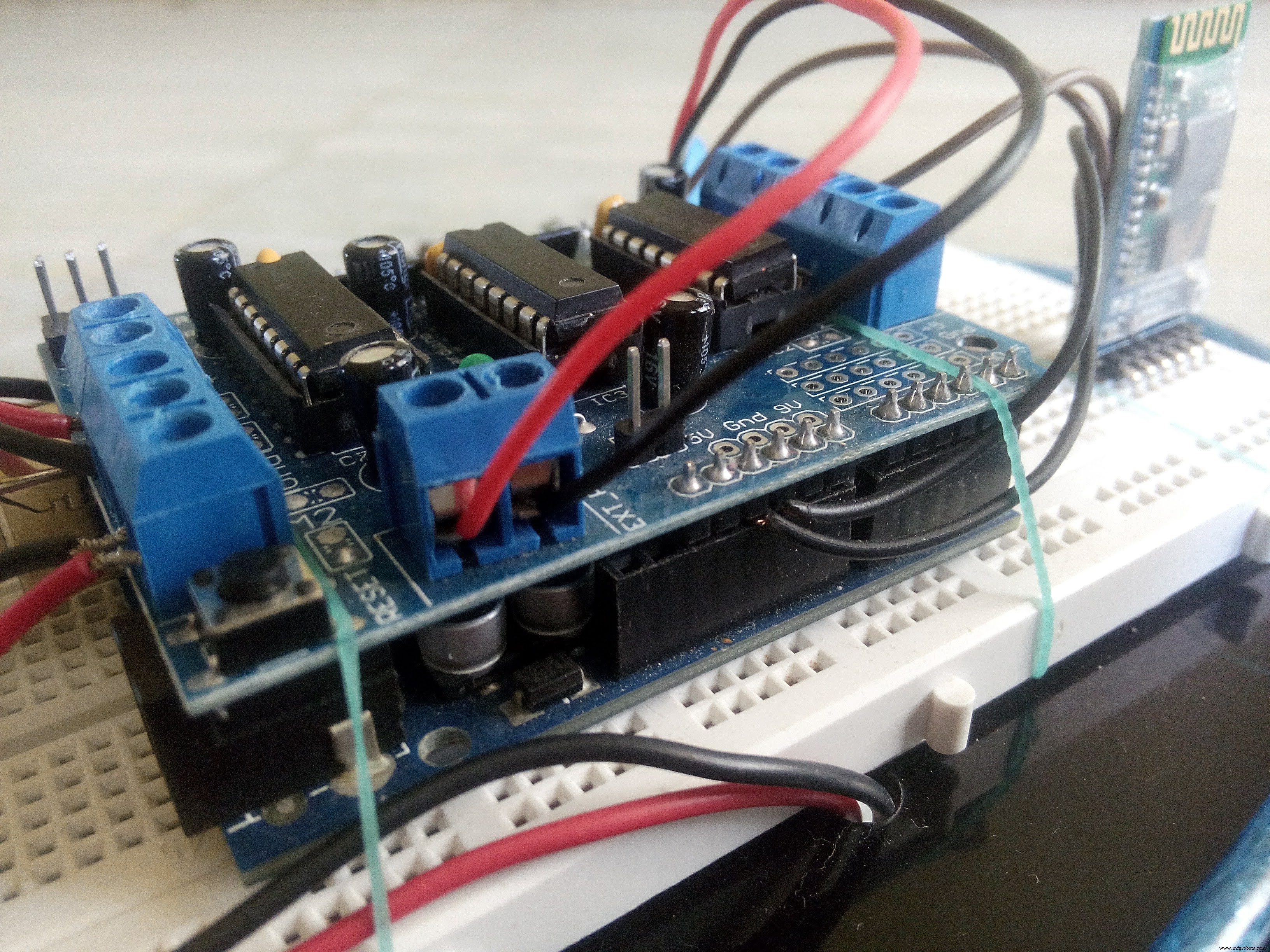
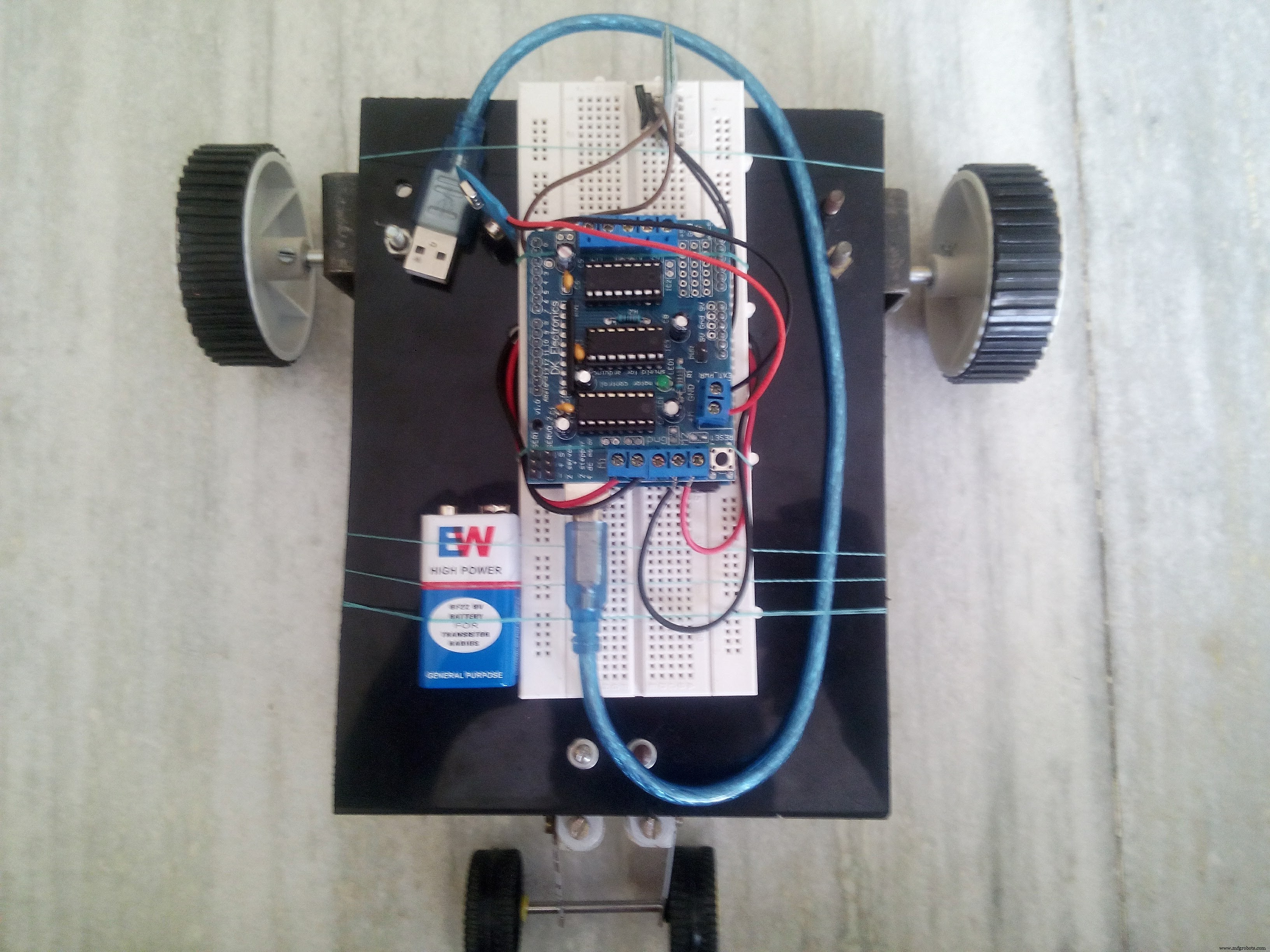
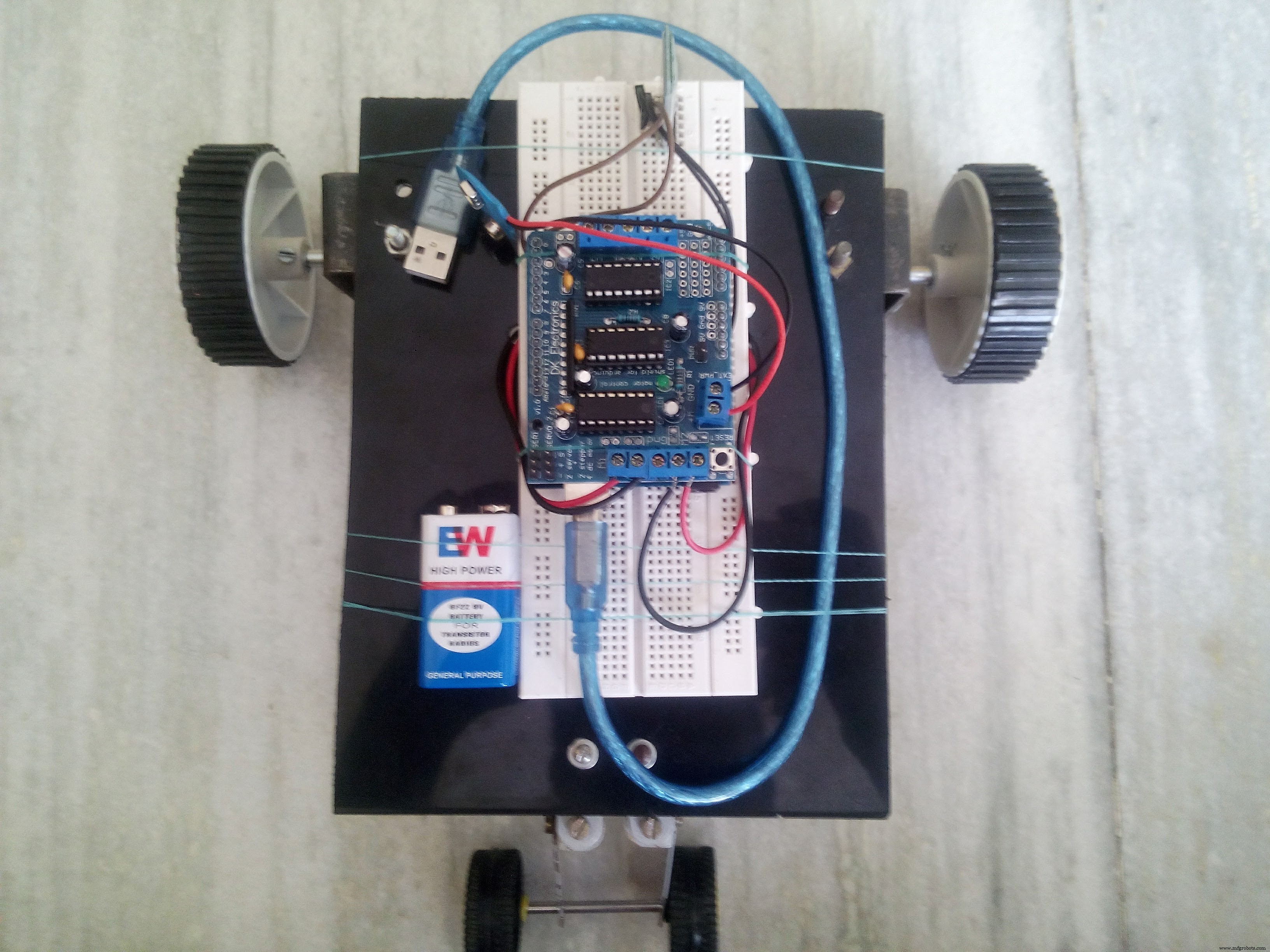
Siga o esquema para fazer as conexões. É assim que ficará depois que todas as conexões forem feitas.
-> Fonte de alimentação
Agora, isso é um pouco crucial.
Para alimentar o Arduino Uno é usado um banco de potência com tensão de saída de 5v. Isso não é suficiente para acionar os motores de 12 Vcc. Portanto, precisamos de uma fonte de alimentação adicional.
Usei duas baterias de 9v em série para obter alimentação de 18v. O maior problema aqui era que também era necessária uma boa quantidade de corrente.
Minhas baterias não foram capazes de fornecer corrente suficiente e, portanto, o desempenho deste carro não foi 100% satisfatório. Estava funcionando, mas os motores funcionavam em velocidade muito baixa.
Por isso recomendo usar bateria de 12v senão teria que comprometer a velocidade.
-> Código
Aqui, usaremos o sentido de rotação dos motores para controlar a direção do carro.
Avançar - Ambos os motores se movem na direção para frente
Para trás - Ambos os motores se movem na direção para trás
Esquerda - o motor esquerdo se move para trás e o motor direito se move para frente
Direita - o motor esquerdo se move para frente e o motor direito se move para trás
Parar - Ambos os motores param
void forward () {motor1.run (FORWARD); motor2.run (FORWARD);} void backward () {motor1.run (BACKWARD); motor2.run (BACKWARD);} void left () {motor1.run (BACKWARD); motor2.run (FORWARD);} void right () {motor1.run (FORWARD); motor2.run (PARA TRÁS);} void Stop () {motor1.run (RELEASE); motor2.run (RELEASE);} ----------------------------------------------- ---------------------------------------
Então era isso!
1. Basta fazer o upload do código para o Arduino.
2. Faça as conexões.
3. Inicie o aplicativo.
4. Conecte seu telefone ao carro.
Aqui está nossa BELEZA acabada!

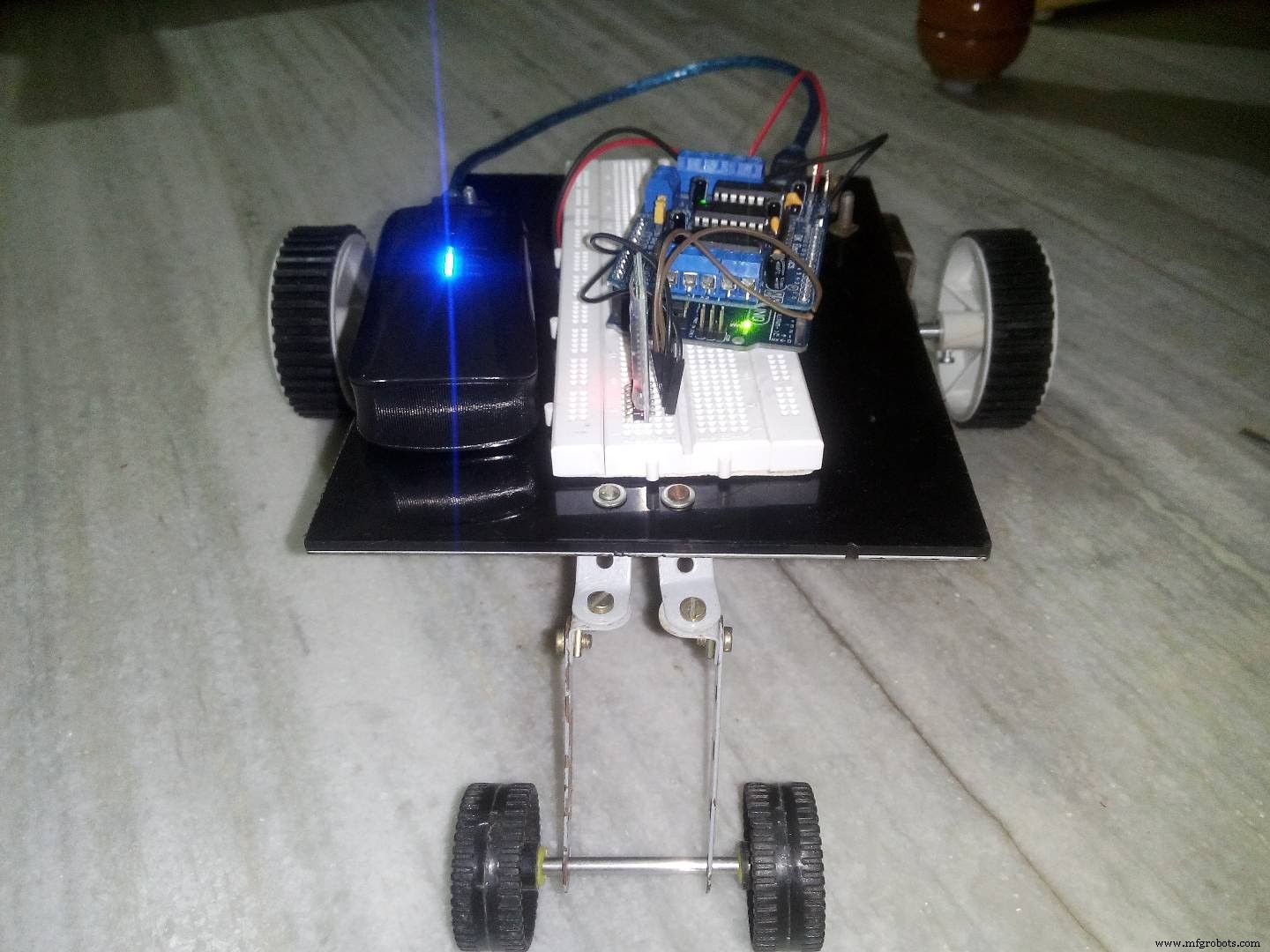
Espero que este tutorial tenha sido bom o suficiente para você começar. Se você tiver alguma sugestão para algumas mudanças ou outras adições a este projeto, por favor, deixe-me saber na seção de comentários.
Código
- O código
O código C / C ++
Este código deve ser carregado no Arduino Uno#includeAF_DCMotor motor1 (1); // motor1 é a esquerda motorAF_DCMotor motor2 (2); // motor2 é o motorint certo val; void setup () {Serial.begin (9600); motor1.setSpeed (255); // a velocidade do motor é definida motor2.setSpeed (255); Stop ();} void loop () {bt =Serial.read (); if (val =='1') // quando o módulo bluetooth recebe 1, o carro avança {forward (); } if (val =='2') // quando o módulo bluetooth recebe 2 o carro se move para trás {backward (); } if (val =='3') // quando o módulo bluetooth recebe 3 o carro se move para a esquerda {left (); } if (val =='4') // quando o módulo bluetooth recebe 4 o carro se move para a direita {right (); } if (val =='5') // quando o módulo bluetooth recebe 5 o carro para {Stop (); }} void forward () {motor1.run (FORWARD); motor2.run (FORWARD);} void backward () {motor1.run (BACKWARD); motor2.run (BACKWARD);} void left () {motor1.run (BACKWARD); motor2.run (FORWARD);} void right () {motor1.run (FORWARD); motor2.run (PARA TRÁS);} void Stop () {motor1.run (RELEASE); motor2.run (RELEASE);}
Esquemas
Essas são as conexões. Conecte a fonte de alimentação de 12 V à blindagem do driver do motor. Observe que o esquema não inclui a fonte de alimentação externa.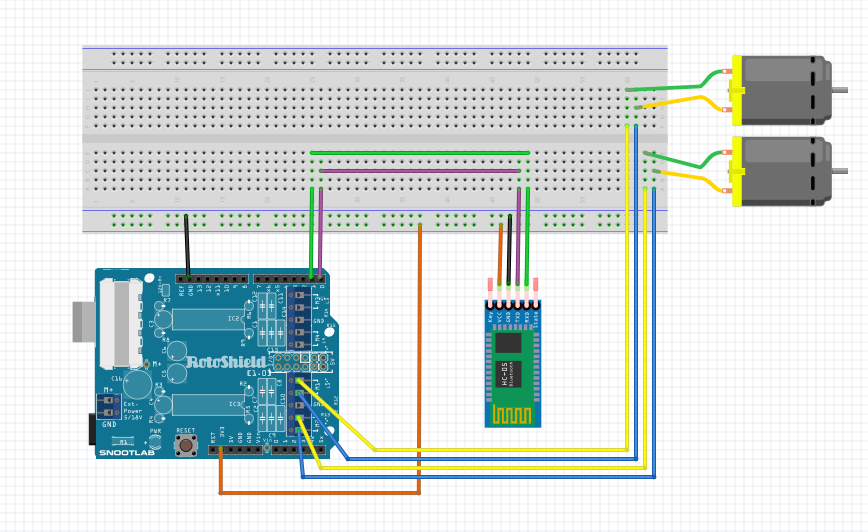
Processo de manufatura
- Robô Raspberry Pi controlado por Bluetooth
- Transforme seu carro RC em carro RC Bluetooth
- Carro RC controlado por joystick
- Arduino com Bluetooth para controlar um LED!
- Calculadora UNO simples
- Robô controlado por fala
- Persistência da visão
- Dispositivos Bluetooth controlados por voz com OK Google
- Wi-Servo:Servomotores controlados por navegador Wi-Fi
- RC Porsche Car (Projeto Arduino)