


Barômetro Arduino
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 |
Sobre este projeto
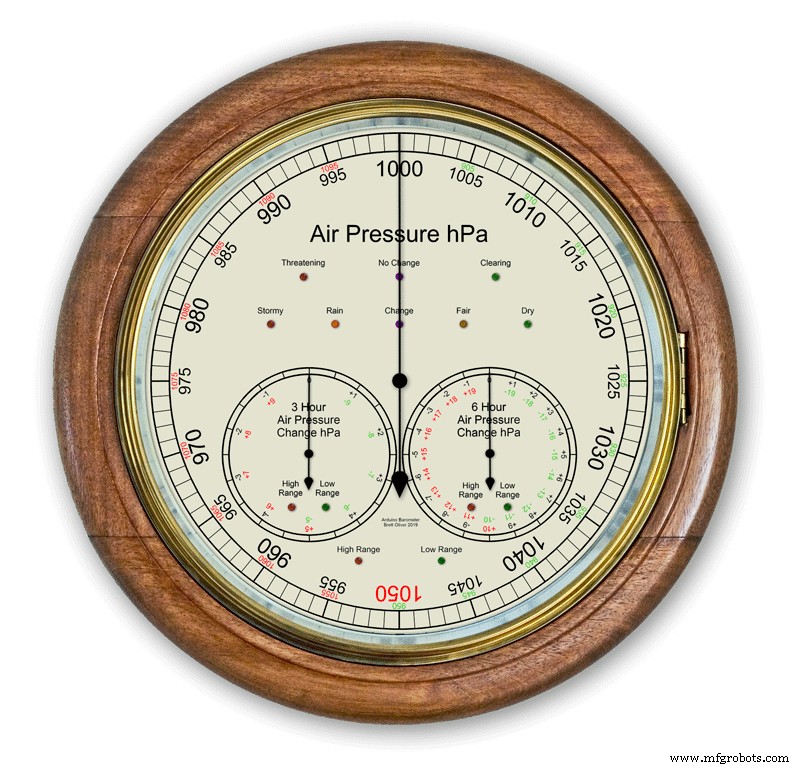
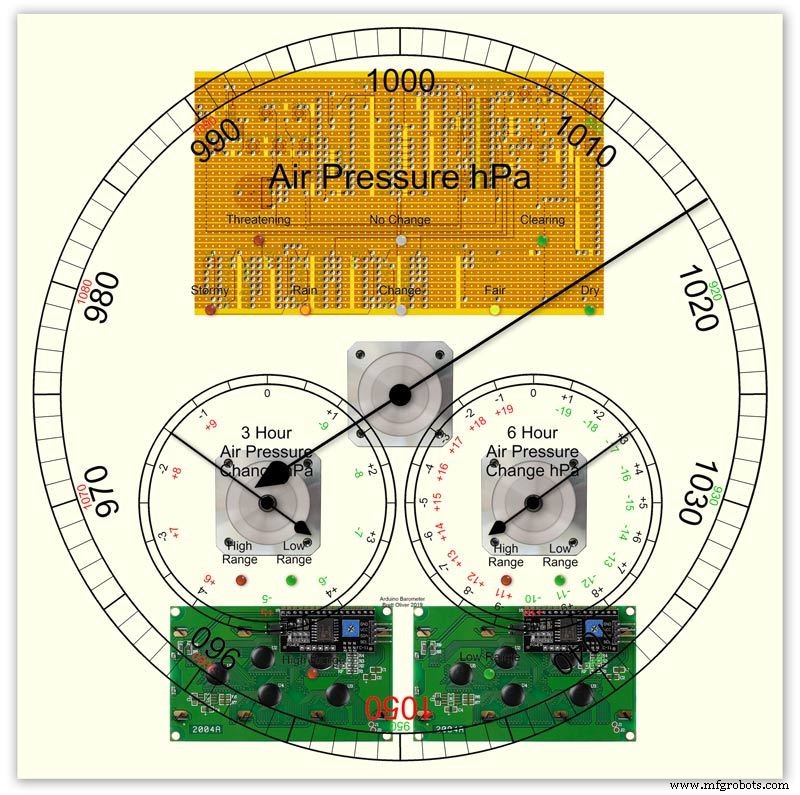
Usando um Arduino UNO e Nano para exibir a pressão do ar em uma tela analógica de 12 "(300 m) usando 3 motores de passo.
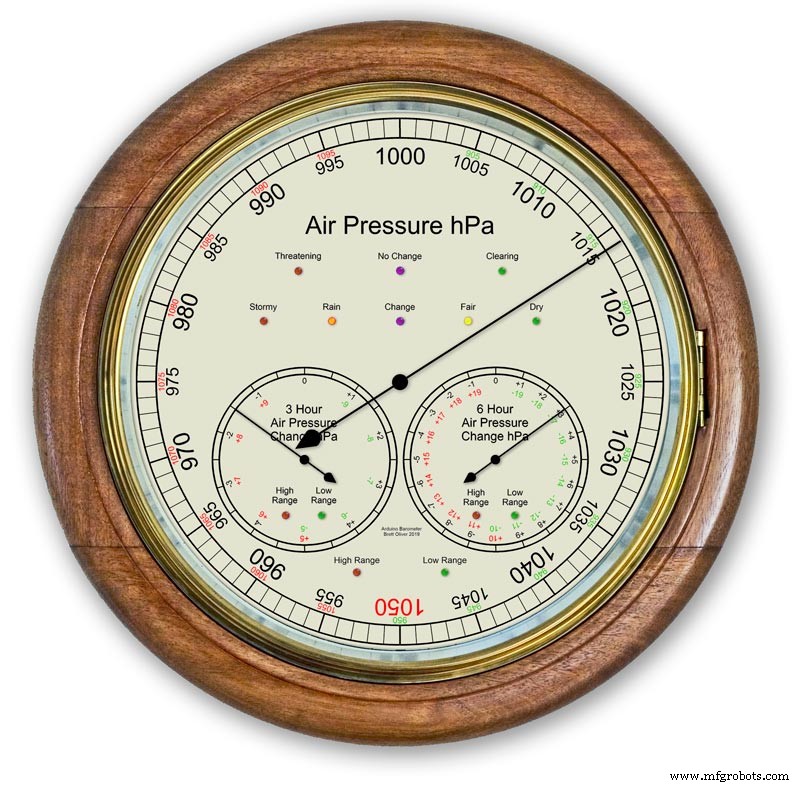
Você pode escolher entre 2 designs de discagem modernos e clássicos.
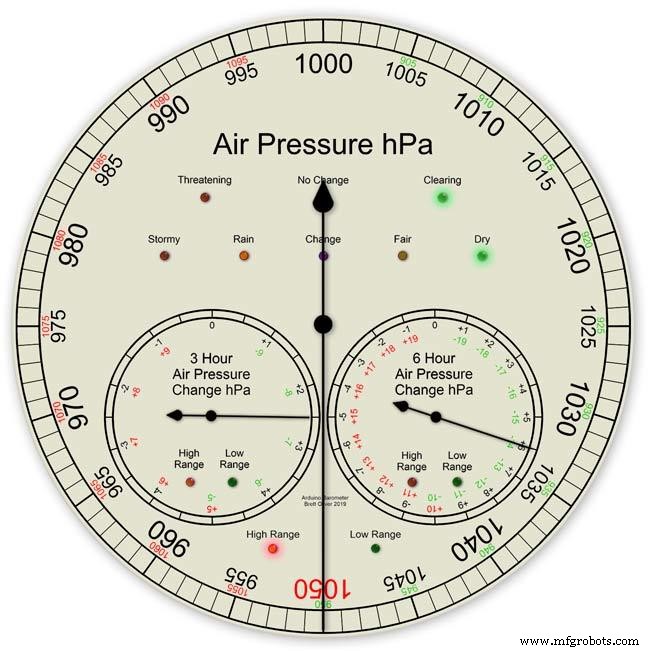
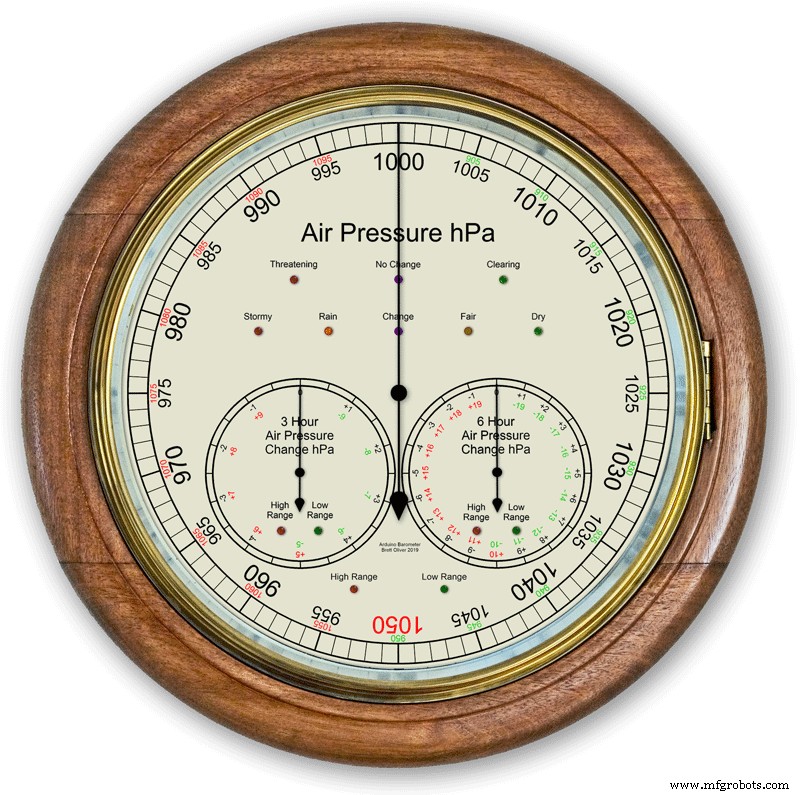
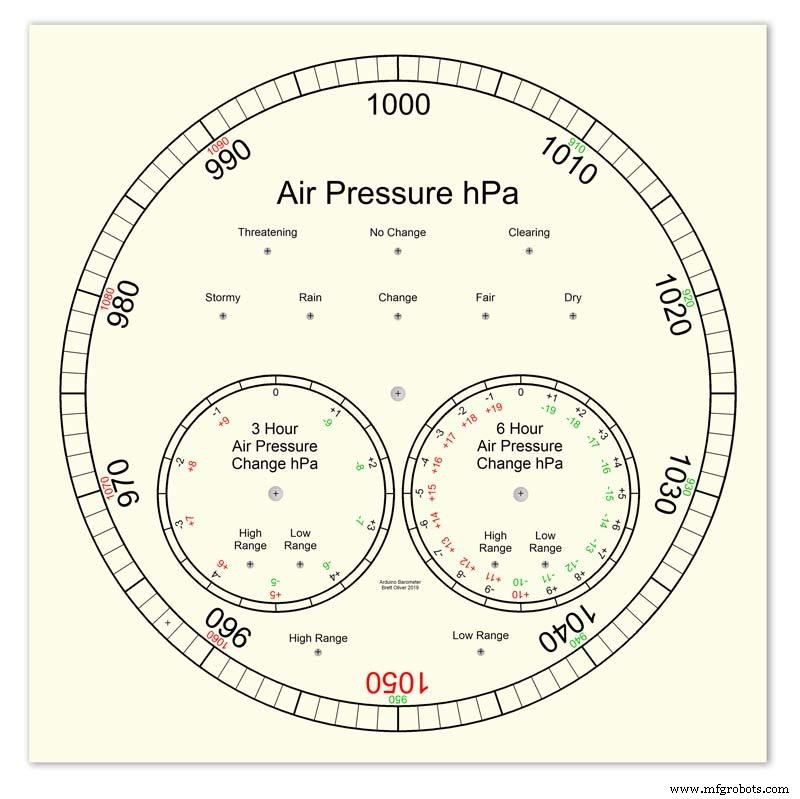
A pressão do ar em hPa (Hectopascal) é exibida no grande mostrador principal e é atualizada a cada 10 minutos.
Existem 2 mostradores secundários, um mostra a mudança de pressão das últimas 6 horas e o outro mostra a mudança de pressão das últimas 3 horas.
O mostrador de 3 horas tem uma resolução aumentada de 0,5 hPa, pois é usado para previsão do tempo. Existem LEDs para mostrar quando o alcance estendido está em uso em todos os três visores e também LEDs para indicar a previsão do tempo fora do visor de 3 horas.
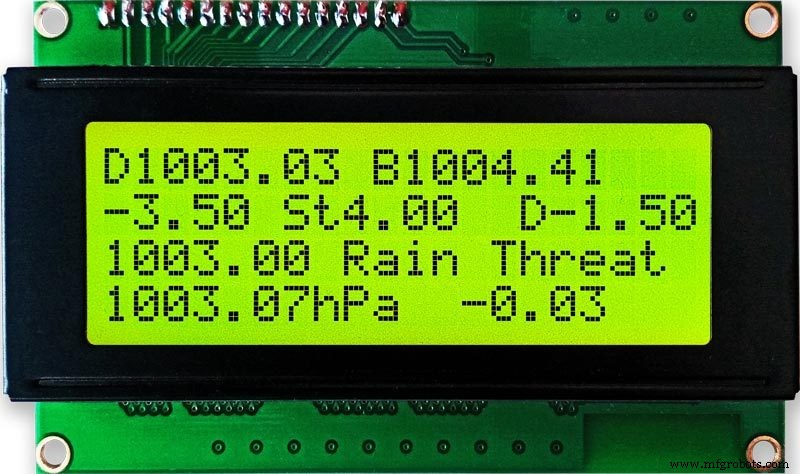
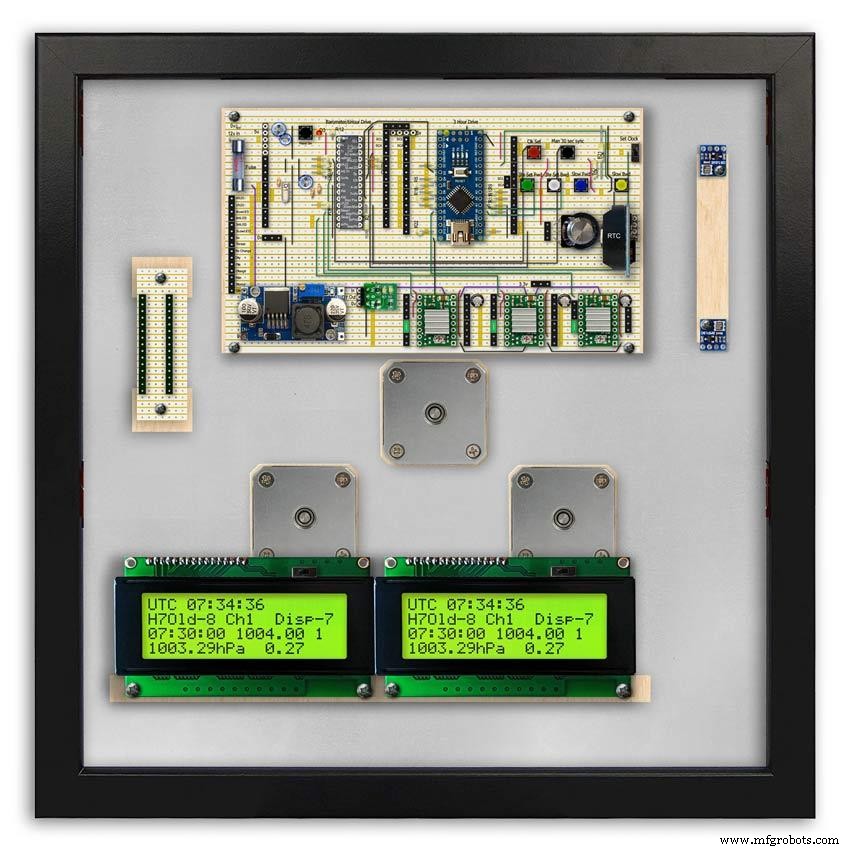
Dentro da caixa, duas telas LCD 20x4 mostram informações de cada um dos microprocessadores.
O display principal da pressão de ar e o display de 6 horas são controlados por um RTC. Este relógio também fornece um pulso de 1 hora para a exibição de 3 horas.
Etapa 1:comparação com um barômetro analógico convencional
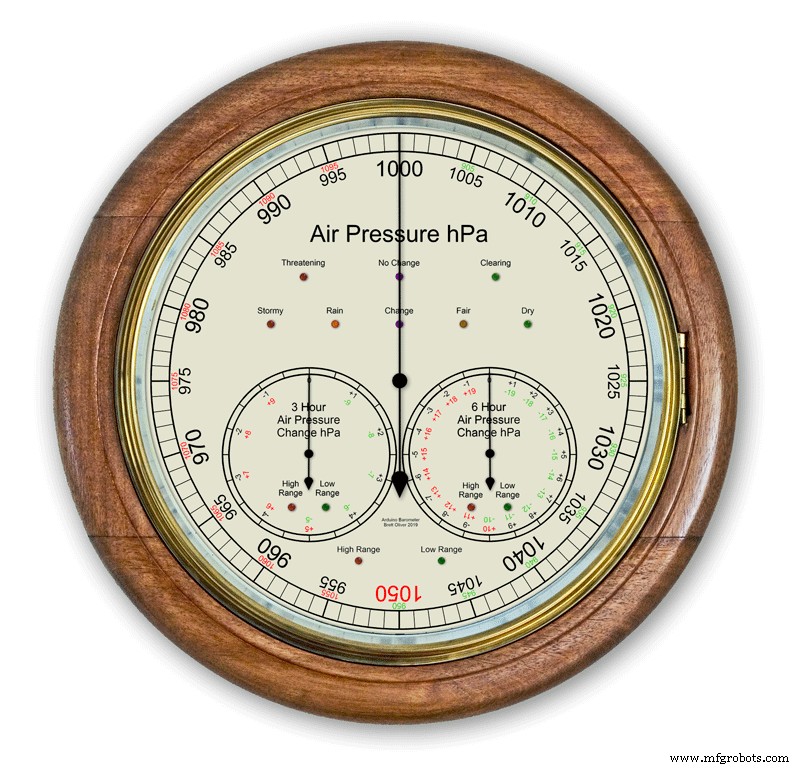
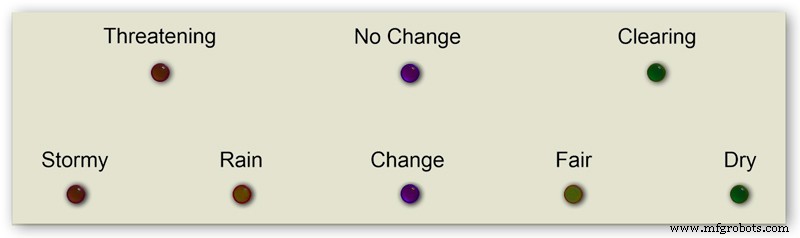
Foto da maioria dos barômetros analógicos. 2 use apenas a pressão do ar como uma indicação para prever o tempo e você deve se lembrar de definir o ponteiro móvel e anotar a hora em que foi definido para ver a mudança da pressão do ar.
A previsão do tempo é simplesmente escrita ao redor do mostrador e lida a partir do ponteiro. A previsão é um pouco mais complicada porque você tem que usar o segundo ponteiro e anotar qualquer mudança em um período de 3 horas. Você terá que memorizar as combinações de pressão atual e pressão crescente / decrescente para obter sua previsão.
Meu barômetro monitora continuamente a mudança de pressão por um período de 3 horas e 6 horas e exibe essas leituras em 2 mostradores separados.
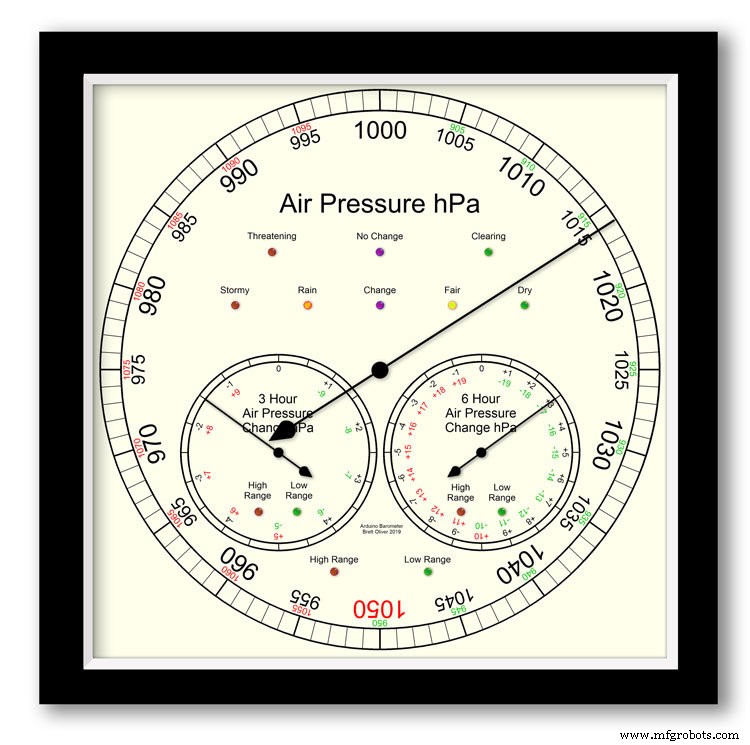
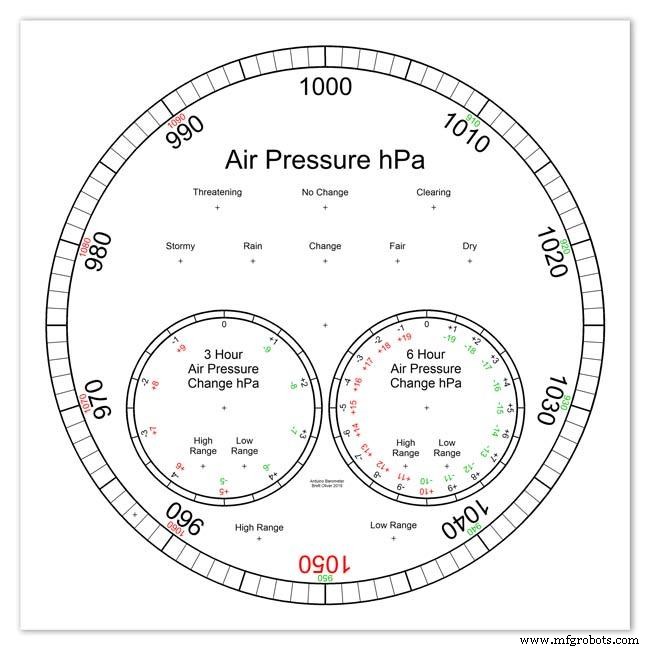
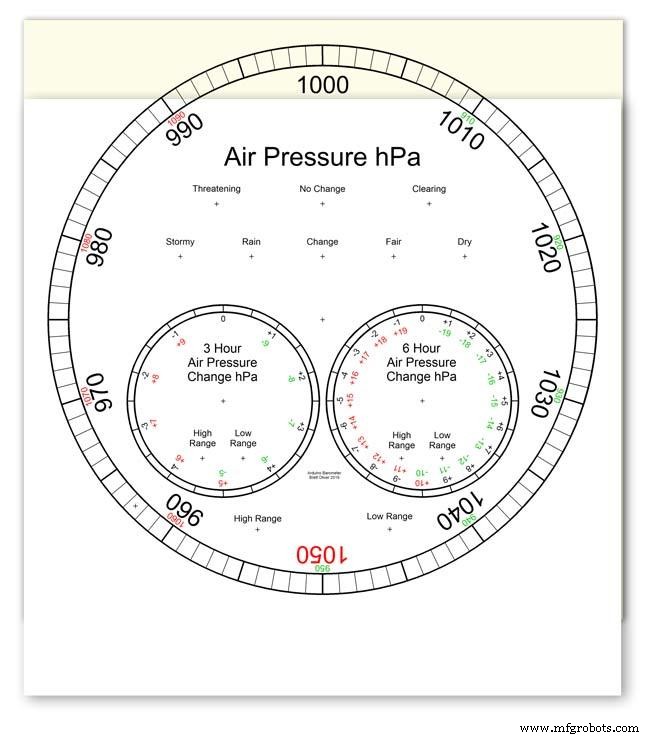
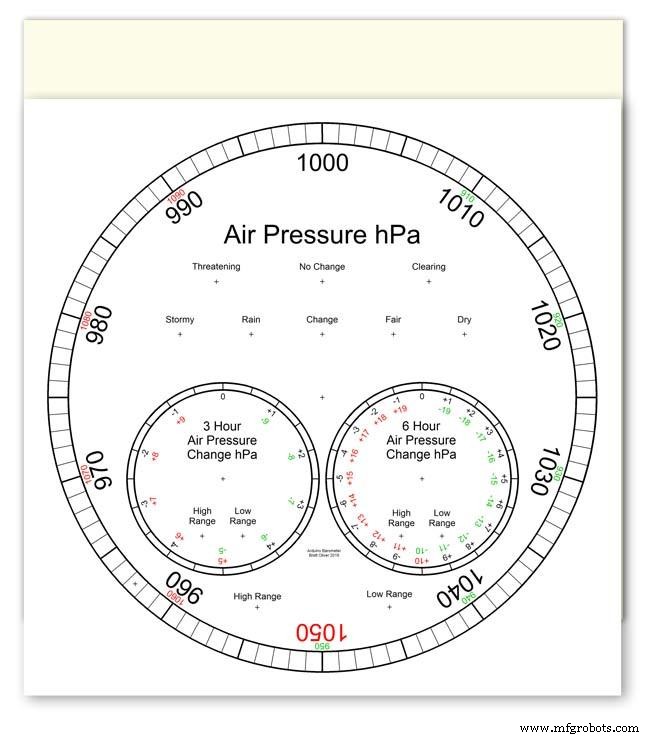
A figura 1 mostra a gama de previsões meteorológicas do meu barômetro.
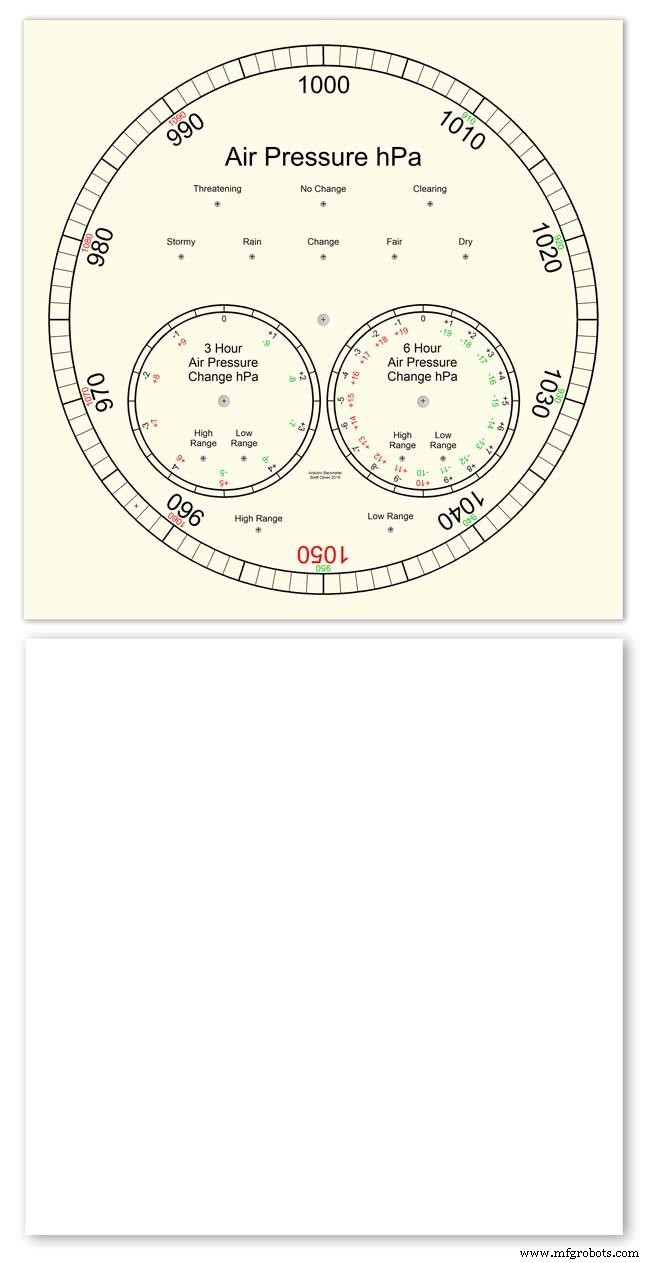
A figura 3 mostra um close up dos LEDs de predição do weathr. A previsão do tempo é baseada na alteração da pressão do ar nas últimas 3 horas.
Etapa 2:demonstração do barômetro, prevendo uma tempestade

Esta animação de lapso de tempo mostra como os ponteiros do Barômetro e os LEDs de previsão reagem a uma tempestade que se aproxima.
Etapa 3:mostradores de alcance estendido
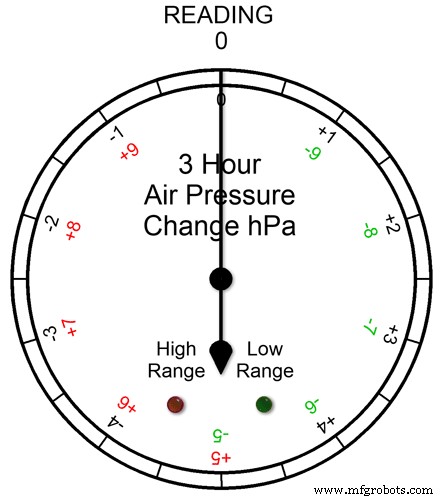
Todos os três dial têm alcance estendido. Isso permite uma resolução maior exibida nos mostradores para clima normal. Em condições climáticas extremas, os mostradores mudam para um alcance estendido.
A animação pic1. mostra como os LEDs acendem quando o alcance estendido está em operação. O LED vermelho mostra quando a leitura é +5 e acima. Você então leria as letras da escala vermelha. O LED verde mostra quando a leitura é -5 e abaixo. Você então leria as letras da escala verde. Se a leitura ultrapassar a faixa estendida, por exemplo, neste dial acima de +9 ou -9, ambos os LEDs se acenderão para mostrar isso - consulte a próxima seção.
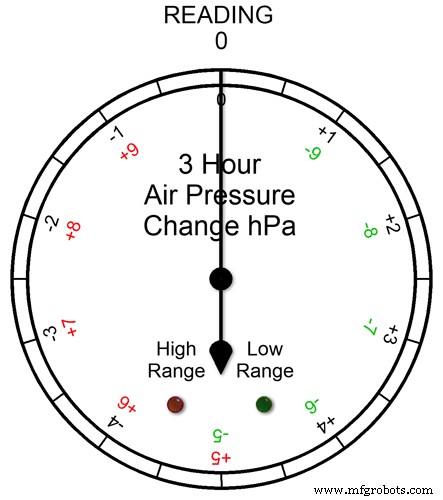
Leituras de pressão acima da faixa estendida Fig.2 Se a leitura da pressão estiver acima da faixa estendida + ou - então ambos os LEDs acenderão para avisá-lo de que ocorreram leituras ou alterações extremas. Os mostradores ainda mostrarão as leituras, por exemplo, no mostrador de 3 horas se a leitura foi -10, então o mostrador apontaria para 0 com ambos os LEDs acesos. Se a leitura de 3 horas fosse -11, o dial apontaria para -1 com os dois LEDs acesos. Você acabou de adicionar 10 à leitura.
Na animação abaixo, a diferença de pressão de 3 horas começa em 0 e a diferença de pressão está diminuindo. Em -5 hPa, o LED verde acende para indicar que a faixa estendida negativa está em uso. A mudança de pressão continua caindo até atingir -10hPa. Isso agora está acima do intervalo estendido, então o LED vermelho também acende. A pressão então cai novamente para -11hPa e ambos os LEDs permanecem acesos. A mudança de pressão começa a diminuir para -10 hPa e, novamente, ainda está acima da faixa estendida, então os dois LEDs permanecem acesos. Assim que a mudança de pressão cair abaixo de -10, o LED vermelho apagará, mostrando que a faixa estendida está novamente em uso.
Eu defini o alcance estendido nos mostradores depois de verificar os extremos do clima no Reino Unido e, embora esperasse que os intervalos estendidos de 3 e 6 horas fossem usados, não pensei que o alcance estendido jamais seria usado no mostrador principal do Barômetro.
Fig.3 Enquanto fazia o protótipo do barômetro em janeiro de 2020, houve uma leitura recorde de 1050hPa no sul da Inglaterra, meu barômetro principal foi para a faixa estendida com o ponteiro do 1050 vermelho e o LED vermelho de alta faixa aceso.
Etapa 4:telas de informações do LCD
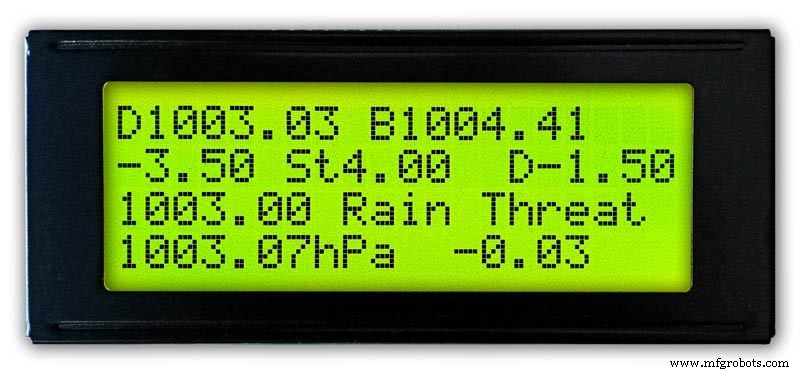
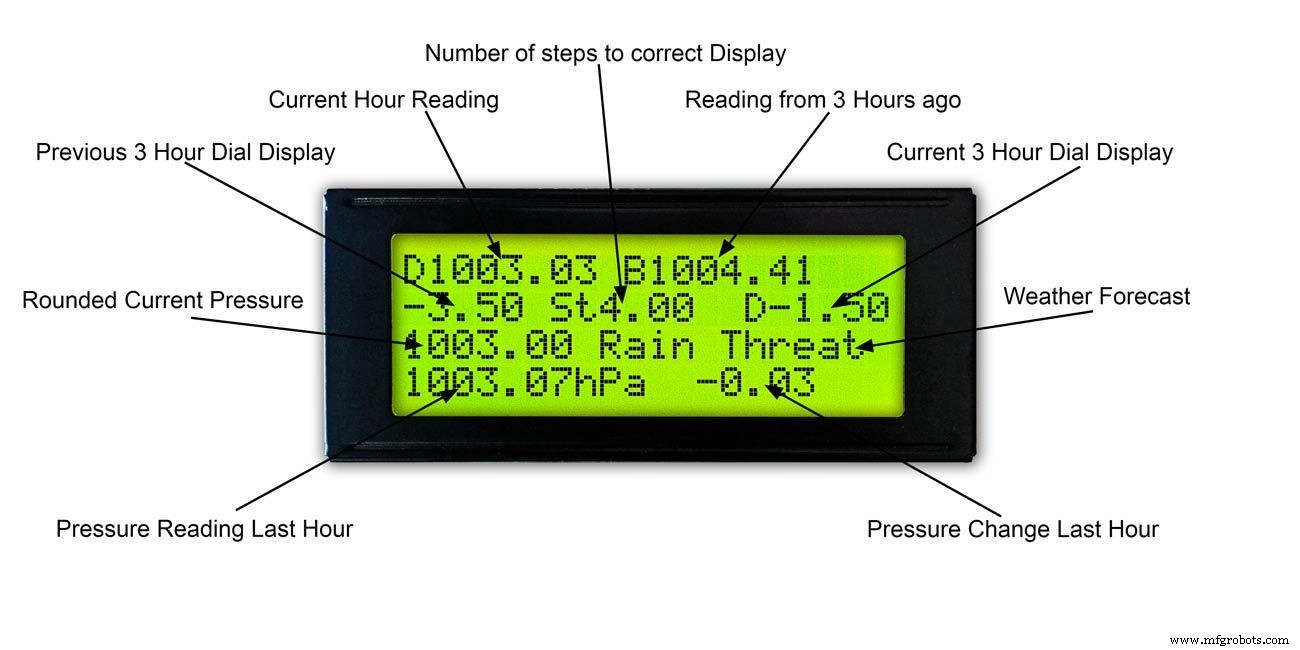
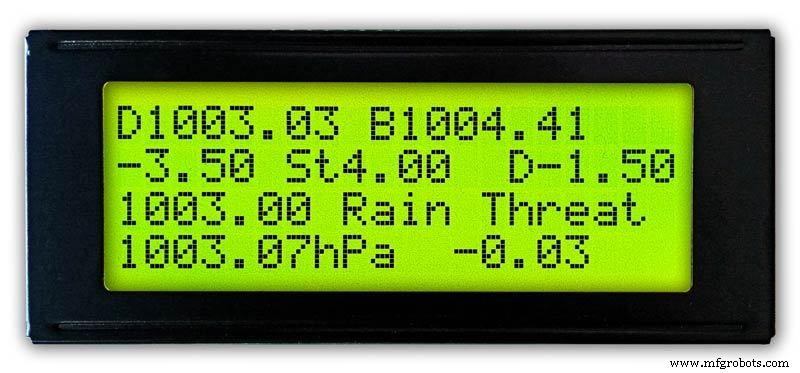
3 horas
Fig.1 e 2 Este display mostra as leituras de 3 horas e informações no mostrador de 3 horas. Ele também mostra a previsão do tempo com base na leitura atual e nas últimas 3 horas.
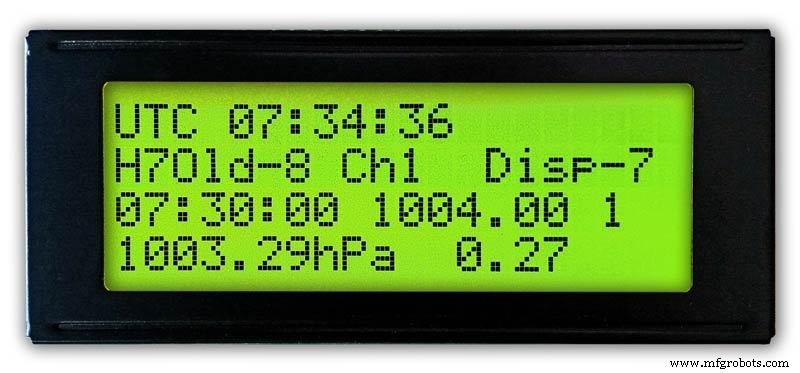
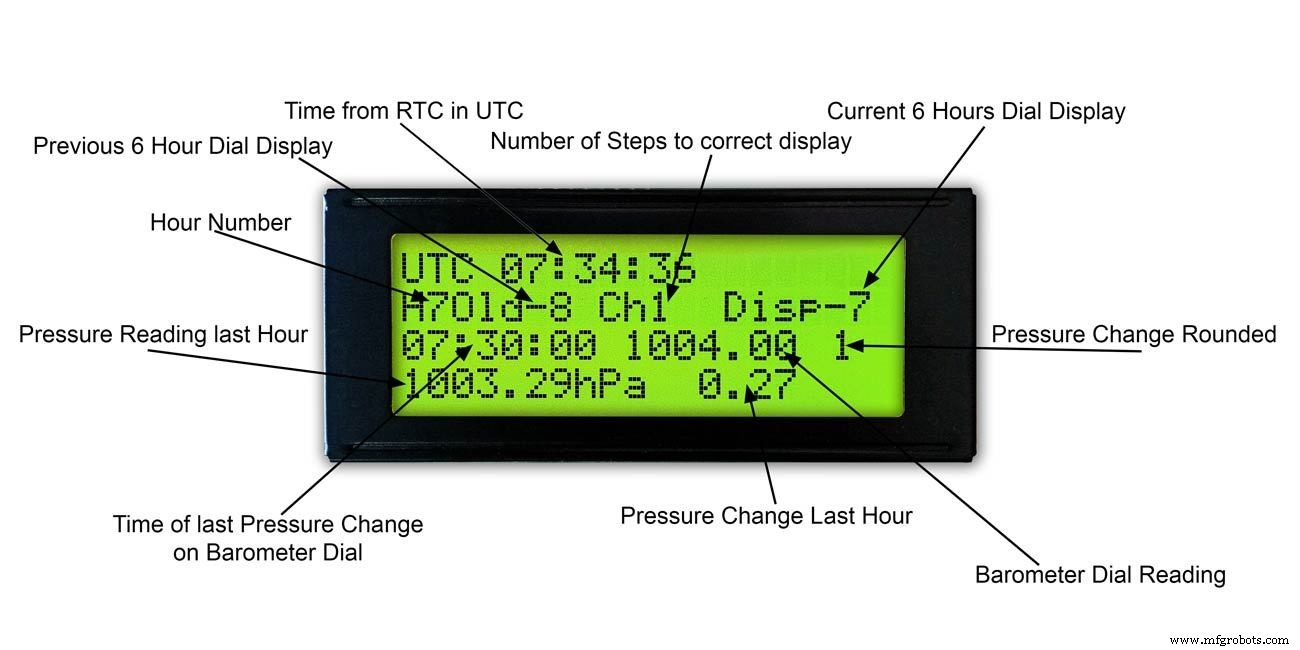
6 horas
Foto. 3 e 4 Este visor mostra as leituras do mostrador do barômetro principal e também as leituras de 6 horas.
Etapa 5:previsão do tempo

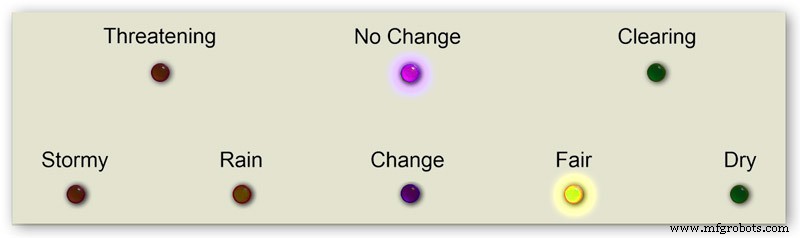

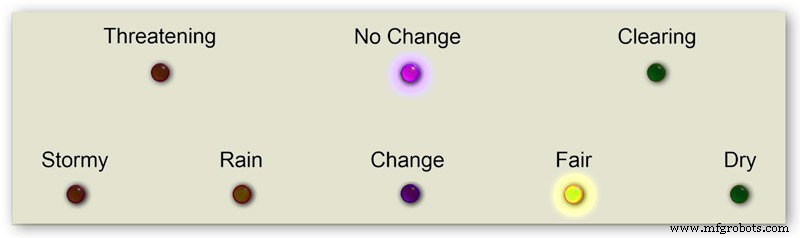
A previsão do tempo no meu barômetro usa 8 LEDs.
Usando a pressão do ar atual e a taxa de mudança nas últimas 3 horas, o clima é previsto nos LEDs.
A animação 1 mostra as várias combinações de combinações de LED de previsão.
Visitei vários sites de previsão do tempo e reuni as seguintes informações sobre a previsão do tempo com um barômetro.
Previsão do tempo com o barômetro
Mais especificamente, um barômetro com leituras em hPa pode ser interpretado desta maneira:
Se a leitura for superior a 1022 hPa
Pressão crescente ou constante significa tempo bom contínuo. Pressão em queda lenta significa tempo bom. Pressão em queda rápida significa condições nubladas e mais quentes.
Se cair entre 1009–1022 hPa
Pressão crescente ou constante significa que as condições atuais continuarão. A pressão em queda lenta significa pouca mudança no clima. A queda rápida da pressão significa que há probabilidade de chuva ou neve se estiver frio o suficiente.
Se a leitura for inferior a 1009 hPa
Pressão crescente ou constante indica clareamento e clima mais frio. Pressão de queda lenta indica chuva Pressão de queda rápida indica que uma tempestade está chegando.
Usar as informações acima do meu barômetro aplica a seguinte lógica para prever o tempo.
A lógica é aplicada na sequência abaixo com os LEDs resultantes acesos.
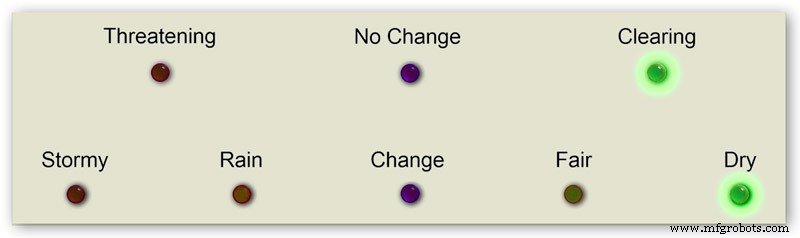
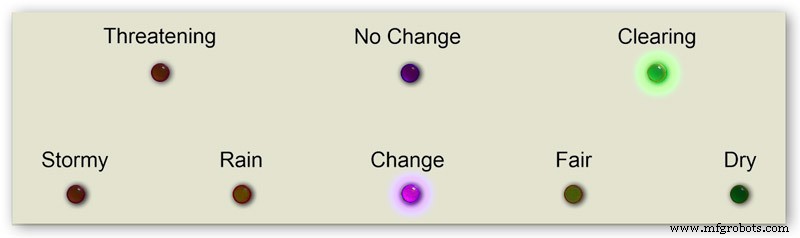
Pic.2 Pressão do ar <1009 hPa
A pressão crescente ou constante indica clareamento e clima mais frio
Pressão do ar <1009,00 e mudança de 3 horas> =0
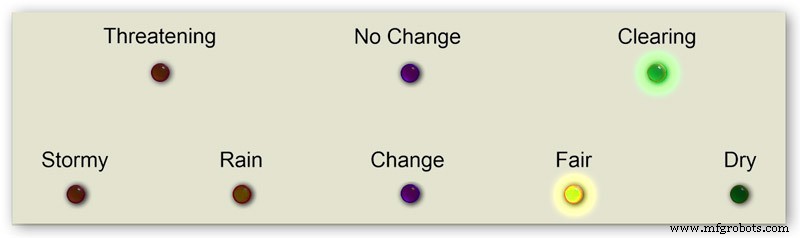
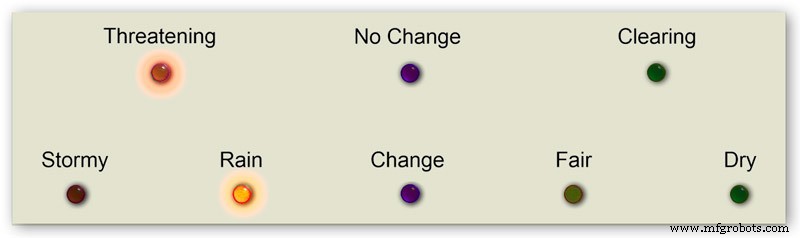
Pic.3 Pressão do Ar <1009 hPa
Pressão caindo lentamente indica chuva
Pressão do ar <1009,00 e mudança de 3 horas <0 e mudança de 3 horas> =-1,5
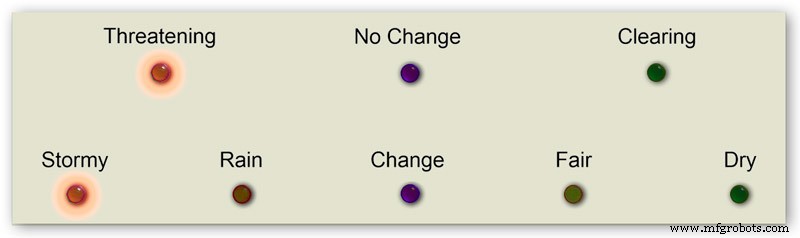
Pic.4 Pressão do Ar <1009 hPa
A pressão em queda rápida indica que uma tempestade está chegando.
Pressão do ar <1009,00 e mudança de 3 horas <-1,5
Pic.5 A pressão do ar está entre 1009 e 1022 hPa
A pressão crescente ou constante significa que as condições atuais continuarão.
A queda lenta da pressão significa pouca mudança no clima.
Pressão do ar> =1009,00 e pressão do ar <=1022,00 e alteração de 3 horas> =-1,5 e alteração de 3 horas <=1,5
Pic.6 A pressão do ar está entre 1009 e 1022 hPa
A pressão do ar subindo rapidamente significa que o tempo está melhorando
Pressão do Ar> =1009,00 e Pressão do Ar <=1022,00 e mudança de 3 horas> 1,5
Pic.7 A pressão do ar está entre 1009 e 1022 hPa
A pressão em queda rápida significa que há probabilidade de chuva ou neve se estiver frio o suficiente.
Pressão do Ar> =1009,00 e Pressão do Ar <=1022,00 e mudança de 3 horas <-1,5
Pic.8 Pressão de Ar acima de 1022 hPa
Pressão crescente ou constante significa tempo seco.
Pressão de ar> 1022,00 e mudança de 3 horas> =0
Pic.9 Pressão de Ar acima de 1022 hPa
A pressão em queda lenta significa tempo bom.
Pressão de ar> 1022,00 e mudança de 3 horas
Pic.10 Pressão de Ar acima de 1022 hPa
Pressão em queda rápida significa mudança
Pressão de ar> 1022,00 e mudança de 3 horas <-1,5
Etapa 6:inicialização do barômetro
Na inicialização, um teste de LED é executado.
Depois de concluídos, os ponteiros retornarão às configurações iniciais, prontos para serem calibrados.
Etapa 7:Configurações de inicialização inicial RTC
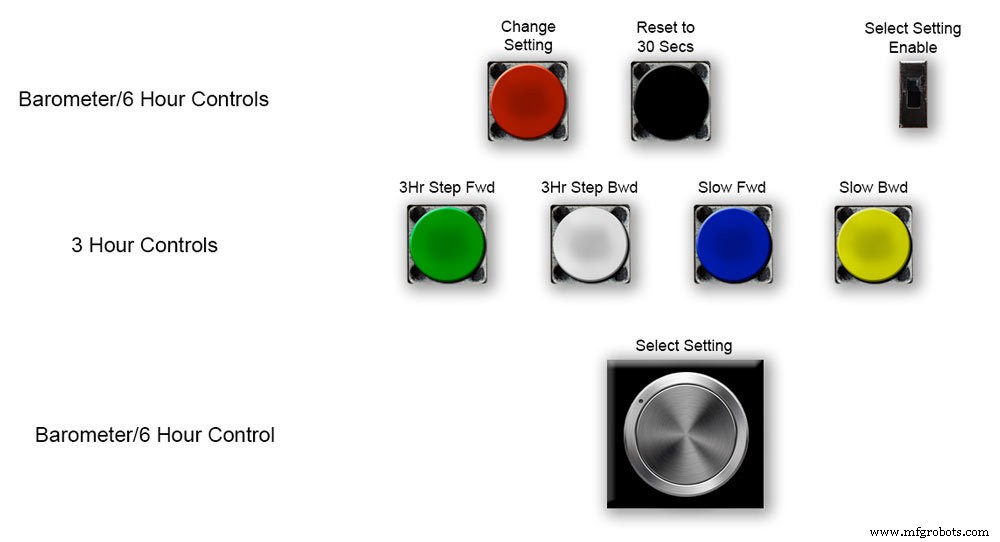






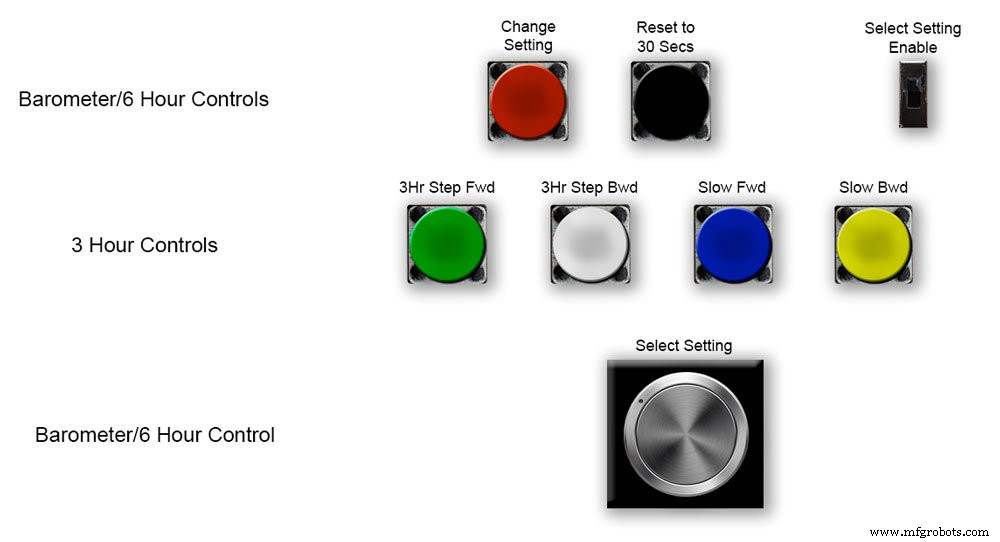
Fig.1 Na inicialização inicial, o barômetro precisará ser configurado usando os controles na placa Vero.
RTC
Fig.2 O RTC precisará ser configurado para o horário correto. Eu configuro para UTC e não me preocupo em mudar para o horário de verão. Antes de ajustar a hora, anote o valor "Disp" neste caso -5. Este é o valor do ponteiro de 6 horas e será necessário posteriormente na configuração. Deslize a chave "Selecionar configuração habilitada" para a posição Ativado. O display não mudará.
Fig.3 Gire lentamente o botão "Selecionar configuração" no sentido horário e a 2ª linha do display LCD principal mudará.
Pare quando o visor mostrar "RTC Hour Retard" Se desejar retardar as horas RTC, pressione o botão vermelho "alterar configuração". Um único clique retrocederá as horas. Vários cliques reduzirão o número de cliques pressionados, mas levará um segundo para atualizar o RTC.
Pic.4 Girar o botão "Selecionar configuração" ainda mudará a exibição para "Avanço da hora RTC"
Se você quiser adiantar as horas RTC, pressione o botão vermelho "alterar configuração". Um único clique avançará as horas. Múltiplos cliques irão adiantar o número de cliques pressionados, mas levará um segundo para atualizar o RTC.
Pic.5 Girando o botão "Selecionar configuração" ainda mais, a tela será alterada para "RTC Min Retard"
Se você quiser retardar os minutos RTC, pressione o botão vermelho "alterar configuração". Um único clique retrocederá os minutos. Vários cliques reduzirão o número de cliques pressionados, mas levará um segundo para atualizar o RTC.
Pic.6 Girando o botão "Selecionar configuração" ainda mais, a tela será alterada para "RTC Min Advance"
Se você quiser avançar os minutos RTC, pressione o botão vermelho "alterar configuração". Um único clique avançará os minutos. Vários cliques irão avançar o número de cliques pressionados, mas levará um segundo para atualizar o RTC.
Pic.7 Depois de concluir a configuração RTC ou qualquer outra configuração, retorne o botão "Selecionar Configuração" totalmente no sentido anti-horário até que o visor mostre "Desligado"
Deslize a chave "Selecionar configuração habilitada" para a posição Desligado.
Observação. Os segundos podem ser sincronizados para 30 segundos a qualquer momento pressionando o botão preto "Redefinir para 30 segundos". A hora agora será lembrada no RTC se a energia for desligada.
Etapa 8:Configurações de inicialização inicial ponteiro de 6 horas






Ajustando o ponteiro de 6 horas
Fig.1 Assim que o RTC for configurado, o barômetro e os ponteiros de pressão do ar de 6 horas precisam ser configurados.
Deslize a chave "Selecionar configuração habilitada" para a posição Ativado. O display não mudará.
Gire lentamente o botão "Selecionar configuração" no sentido horário até que "6Hr Baro Inch Retard" seja exibido.
Na primeira inicialização, o ponteiro de 6 horas precisará ser calibrado para o dígito mais próximo.
Se o dígito mais próximo estiver atrás da mão, pressione o botão vermelho "alterar configuração". Um único clique moverá a mão para trás, passo a passo. Segurar o botão irá mover a mão para trás repetidamente. Assim que a mão estiver exatamente em um dígito, solte o botão.
Fig.2 Se o dígito mais próximo na frente da mão ou se você retardou a mão usando o acima, gire o botão "Selecionar configuração" no sentido horário até que "6Hr Baro Inch Advn" seja exibido.
Pressione o botão vermelho "alterar configuração". Um único clique avançará a mão passo a passo. Segurar o botão avançará a mão repetidamente. Assim que a mão estiver exatamente em um dígito, solte o botão.
Fig.3 Uma vez que o ponteiro de 6 horas foi definido exatamente em um dígito, o ponteiro das horas precisa ser ajustado para o valor correto.
Antes de ajustar o RTC, você anotou este número -5.
Fig.4 Se o ponteiro de exibição de 6 horas estiver muito avançado.
Gire o botão "Selecionar configuração" no sentido horário até que "6Hr Baro Retard" seja exibido. Pressione e solte o botão vermelho "alterar configuração". Esta soleira dá um passo do ponteiro de 6 horas para trás 1 unidade inteira. Pare quando o ponteiro de 6 horas atingir o número anotado.
Fig.5 Se o ponteiro de exibição de 6 horas estiver atrasado.
Gire o botão "Selecionar configuração" no sentido horário até que "6Hr Baro Advance" seja exibido. Pressione e solte o botão vermelho "alterar configuração". Este ainda avança o ponteiro de 6 horas 1 unidade inteira. Pare quando o ponteiro de 6 horas atingir o número anotado.
Fig.6 Observe que a exibição de 6 horas levará 8 horas para exibir corretamente, pois será necessário armazenar as leituras na memória durante esse período de tempo.
Você sempre pode adicionar as leituras de pressão de ar anteriores ao código antes de carregar, se você precisar que o visor de 6 horas funcione desde a inicialização.
O código converte as horas em um número H conforme exibido acima de H =6. Na linha de código 128 H6 significará colocar a leitura da hora atual abaixo da hora6, a leitura anterior na hora7, a leitura antes daquela na hora0 etc.
int hora0 =1015;
int hora1 =1016
; int hora2 =1015;
int hora3 =1016;
int hora 4 =1016
; int hora5 =1016;
int hora6 =1012;
int hora7 =1013;
Você deve conseguir obter suas leituras locais da Internet.
Eu configurei uma página da minha estação meteorológica para que eu pudesse verificar isso enquanto construí o barômetro.
Clique neste link para ver as mudanças de hora em hora em Kenley Surrey no Reino Unido.
Etapa 9:Manual do Barômetro Principal das Configurações de Inicialização Inicial




Configurando o ponteiro do barômetro principal
Fig.1 Agora que a exibição de 6 horas está correta, o ponteiro do barômetro principal precisará ser definido para a pressão ao nível do mar arredondada na 3ª linha do LCD principal.
Na primeira inicialização, o ponteiro do barômetro principal precisará ser calibrado para o dígito mais próximo. Gire o botão "Selecionar configuração" no sentido horário até que "Baro Inch Retard" seja exibido.
Se o dígito mais próximo estiver atrás da mão, pressione o botão vermelho "alterar configuração". Um único clique moverá a mão para trás, passo a passo. Segurar o botão irá mover a mão para trás repetidamente. Assim que a mão estiver exatamente em um dígito, solte o botão.
Fig.2 Se o dígito mais próximo na frente da mão ou se você retardou a mão usando o acima, gire o botão "Selecionar configuração" no sentido horário até que "Baro Inch Advn" seja exibido.
Pressione o botão vermelho "alterar configuração".
Um único clique avançará a mão passo a passo. Segurar o botão avançará a mão repetidamente. Quando a mão estiver exatamente sobre um dígito, solte o botão.
Fig.3 Se o ponteiro do barômetro principal estiver muito avançado.
Gire o botão "Selecionar configuração" no sentido horário até que "Retardo do barômetro" seja exibido.
Pressione e solte o botão vermelho "alterar configuração".
Isso fará com que o ponteiro do barômetro principal recue 1 unidade inteira. Pare quando o ponteiro das horas atingir a pressão ao nível do mar arredondada indicada.
Fig.4 Se o ponteiro do barômetro principal estiver atrasado em comparação com a pressão ao nível do mar arredondada indicada.
Gire o botão "Selecionar configuração" no sentido horário até que "Avanço do barômetro" seja exibido.
Pressione e solte o botão vermelho "alterar configuração".
Isso avançará o ponteiro do barômetro principal 1 unidade inteira. Pare quando o ponteiro atingir a pressão ao nível do mar arredondada indicada.
Etapa 10:Configurações de inicialização inicial Ponteiro de 3 horas
Ajustando o ponteiro de 3 horas.
Oic.1 O ajuste do ponteiro de 3 horas é feito pelos quatro botões Verde, Branco, Azul e Amarelo no tabuleiro Vero.
Na inicialização, o ponteiro de 3 horas precisará ser calibrado para a unidade ou meia unidade mais próxima.
Fig.2 Se o ponteiro de 3 horas mais próximo do valor da unidade estiver à frente do ponteiro de 3 horas, pressione o botão amarelo "Bwd lento" para avançar o ponteiro para trás. Manter o botão pressionado empurrará repetidamente a mão para trás.
Se o ponteiro de 3 horas mais próximo do valor da unidade estiver atrás do ponteiro de 3 horas, pressione o botão azul "Avanço lento" para avançar o ponteiro. Manter o botão pressionado avançará repetidamente a mão para a frente.
Quando o ponteiro de 3 horas estiver exatamente em uma unidade / meia unidade, o ponteiro pode ser definido com o valor "D" no visor LCD de 3 horas.
Se o ponteiro estiver adiantado em relação ao valor "D", pressione o botão branco "3Hr Step Bwd" para avançar o ponteiro de 3 horas pela metade para trás.
Se o ponteiro estiver abaixo do valor "D", pressione o botão verde "3Hr Step Fwd" para avançar o ponteiro de 3 horas pela metade.
Observe que a exibição de 3 horas levará 4 horas para exibir corretamente, pois será necessário armazenar as leituras na memória durante esse período de tempo.
Você sempre pode adicionar as leituras de pressão de ar anteriores ao código antes de carregar se você precisar da previsão e do display de 3 horas para funcionar desde a inicialização.
Código de exibição de 3 horas na linha 124
float hour0 é a hora atual
float hour1 é a hora anterior etc etc
float hour0 =1036,00;
float hour1 =1.036,00;
float hour2 =1.036,00;
float hour3 =1.036,00;
float hour4 =1.036,00;
Você deve conseguir obter suas leituras locais da Internet.
Etapa 11:Módulos / componentes



Módulos
Sempre que possível, este projeto usa módulos pré-construídos para economizar tempo de construção e design.
Microprocessadores
Este projeto usa 2 microprocessadores um Atmega 328 (UNO) pic.1 e um Arduino Nano pic.2. Usei essa combinação porque já tinha um 328 construído em outro projeto e, devido ao espaço limitado na placa Vero, adicionei o Nano também.
Poder
O Barômetro usa cerca de 65mA e isso aumentará um pouco à medida que cada motor acelera por uma fração de segundo a cada 10 minutos a cada hora
AMS117 pic.3
O módulo neste projeto é 3,3 V e é usado para alimentar o módulo BMP180.
A série AMS1117 de reguladores de tensão ajustável e fixa foi projetada para fornecer corrente de saída de até 1A e operar com diferencial de entrada para saída de 1 V. A tensão de queda do dispositivo tem garantia máxima de 1,3 V, diminuindo em correntes de carga mais baixas. O ajuste no chip ajusta a tensão de referência para 1,5%. O limite de corrente é definido para minimizar o estresse sob condições de sobrecarga no regulador e nos circuitos da fonte de alimentação. O módulo neste projeto é 3,3 V e é usado para alimentar o módulo BMP180.
LM2596 Conversor Buck DC para DC 3.0-40V para 1.5-35V pic.4 Este módulo converte a entrada de 12v para 5v
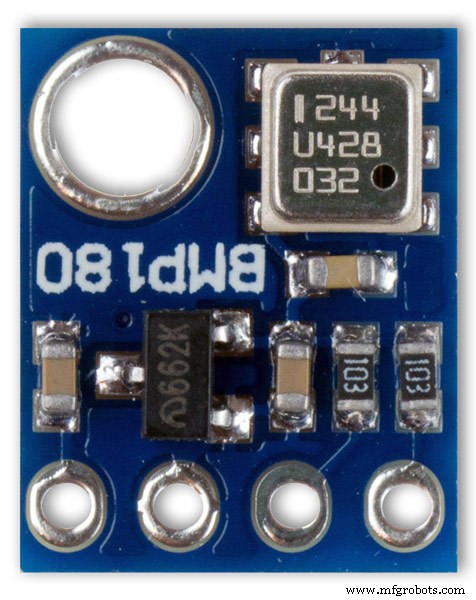
Módulo sensor de pressão BMP180 2 desativado pic.5 O BMP180 Breakout é um sensor de pressão barométrica com interface I2C ("Wire"). Os sensores de pressão barométrica medem a pressão absoluta do ar ao seu redor. Essa pressão varia com o clima e a altitude. Dependendo de como você interpreta os dados, você pode monitorar as mudanças no clima, medir a altitude ou qualquer outra tarefa que requeira uma leitura precisa da pressão.
Conecte os pinos +, -, CL e DA ao seu Arduino.
CL vai para SCL e DA vai para SDA.
IMPORTANTE:Conecte os pinos de alimentação (+ e -) SOMENTE a uma fonte de 3,3V. Tensões maiores danificarão permanentemente a peça. Observe que, como I2C usa drivers de dreno aberto, é seguro conectar os pinos I2C (DA e CL) a uma porta I2C em um microprocessador de 5V.
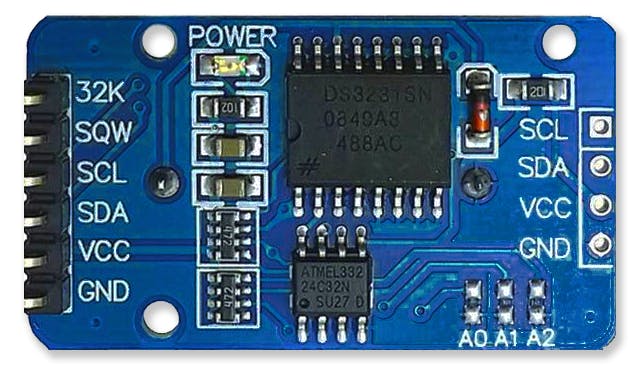
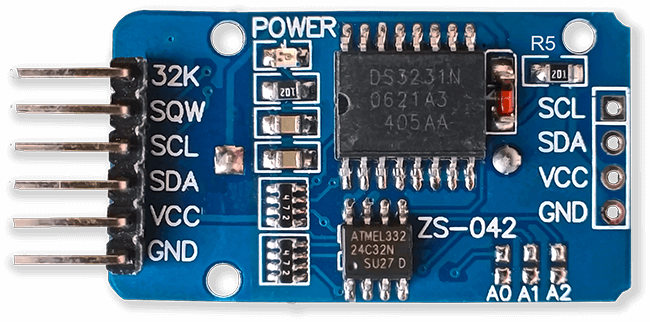
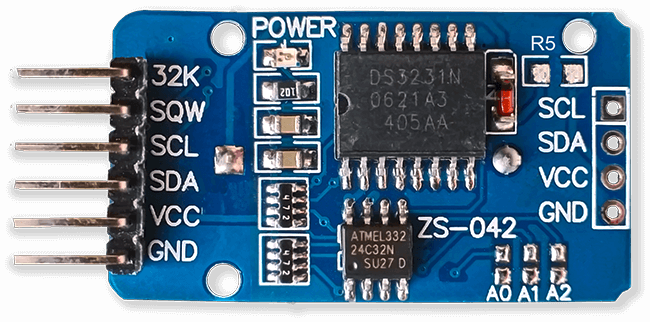
Relógio em tempo real RTC pic.6
Este brômetro usa um módulo de relógio em tempo real de precisão DS3231 AT24C32 I2C.
Este módulo é usado principalmente para cronometragem, mas também fornece carimbos de hora no display LCD. O tempo é definido como UTC e não é alterado para o horário de verão. O módulo é fornecido com uma bateria recarregável de íon-lítio, consulte o diagrama acima. Eu uso uma bateria não recarregável, portanto, removi o resistor R5 do módulo, consulte a seção Modificação de RTC para obter detalhes.
Motores de passo 3 desligados O barômetro usa 3 motores de passo Nema 17 1A, torque de retenção de 13N.cm, 4 derivações, 1,8 °. Usei motores de 1,8 °, pois as etapas se encaixam exatamente em 360 ° 200 vezes. Você pode usar os motores Nema 8 se desejar, mas não use os motores 28BYJ-48-5V, pois eles não têm o ângulo de passo de 1,8 ° exigido.
O ângulo de passo de 1,8 ° é necessário, pois ele se divide exatamente em 360 ° para os mostradores do meu barômetro.
Monitores LCD 2 desligados
Usei 2 visores LCD 20x4, um para o Barômetro, relógio e visor de 6 horas e outro para exibição de 3 horas e previsão.
Etapa 12:Módulos / componentes A4988 Stepper Motor Driver
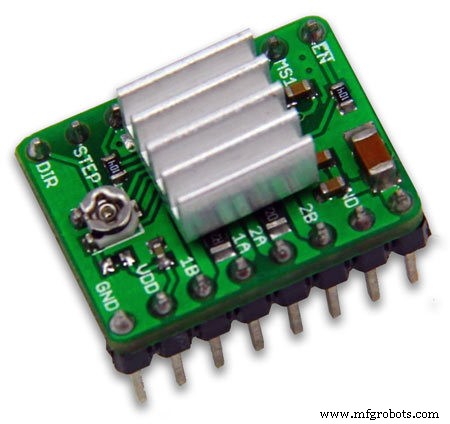
Driver de motor de passo bipolar A4988 microstepping 3 desligado
Importante, leia esta seção com atenção
Meu barômetro está definido para rotação de 1/16 e o código é ajustado de acordo.
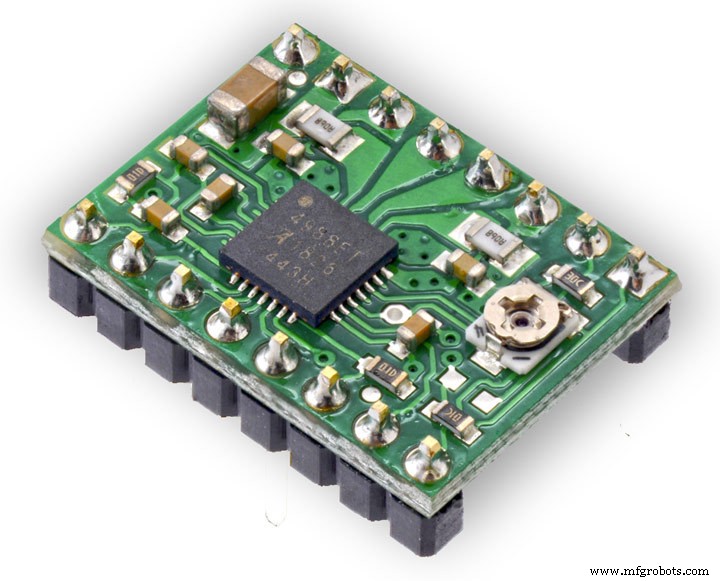
Driver de motor de passo bipolar de microstepping A4988 pic.1 com e pic.2 sem dissipador de calor
Esta placa breakout para o driver de motor de passo bipolar de microstepping A4988 da Allegro apresenta limitação de corrente ajustável, proteção contra sobrecorrente e superaquecimento e cinco resoluções diferentes de microstep (até 1/16 de passo).
Ele opera de 8 V a 35 V e pode fornecer até aproximadamente 1 A por fase sem um dissipador de calor ou fluxo de ar forçado (é classificado para 2 A por bobina com resfriamento adicional suficiente).
Aqui estão alguns dos principais recursos do driver:Interface de controle de direção e etapa simples Cinco resoluções de etapa diferentes:etapa completa, meia etapa, quarto etapa, oitava etapa e décima sexta etapa O controle de corrente ajustável permite definir a saída de corrente máxima com um potenciômetro, que permite usar tensões acima da tensão nominal de seu motor de passo para alcançar taxas de passo mais altas Controle inteligente de corte que seleciona automaticamente o modo de decaimento de corrente correto (decaimento rápido ou lento) Desligamento térmico de superaquecimento, bloqueio de subtensão e proteção contra corrente cruzada Proteção contra curto-aterramento e carga em curto
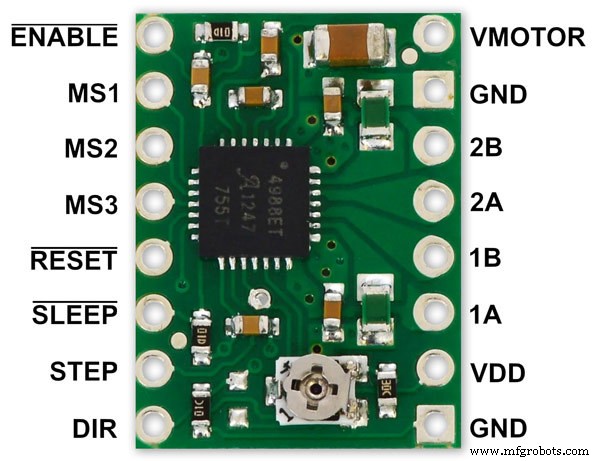
Conexões de energia O driver requer uma tensão de alimentação lógica (3 - 5,5 V) conectada aos pinos VDD e GND e uma tensão de alimentação do motor (8 - 35 V) conectada ao VMOT e GND. Essas fontes devem ter capacitores de desacoplamento adequados próximos à placa e devem ser capazes de fornecer as correntes esperadas (picos de até 4 A para a alimentação do motor).
Aviso:esta placa transportadora usa capacitores de cerâmica de baixo ESR, o que a torna suscetível a picos de tensão LC destrutivos, especialmente ao usar cabos de alimentação com mais de alguns centímetros. Sob as condições certas, esses picos podem exceder a classificação de tensão máxima de 35 V para o A4988 e danificar permanentemente a placa, mesmo quando a tensão de alimentação do motor é tão baixa quanto 12 V. Uma maneira de proteger o driver de tais picos são colocar um grande (pelo menos 47 µF) capacitor eletrolítico na alimentação do motor (VMOT) e aterrar em algum lugar perto da placa.
Conexões do motor
Motores de passo de quatro, seis e oito fios podem ser acionados pelo A4988 se estiverem conectados corretamente. Aviso:conectar ou desconectar um motor de passo enquanto o driver está ligado pode destruir o driver. (De modo mais geral, religar qualquer coisa enquanto estiver energizado está pedindo problemas.)
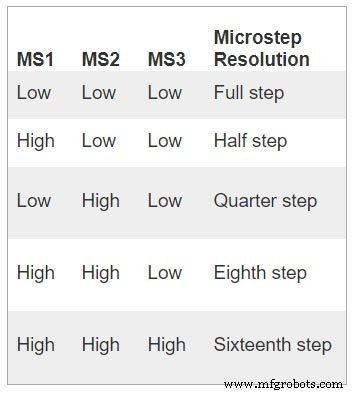
Tamanho da etapa (e microstep)
veja a foto da mesa. Os motores 3Stepper normalmente têm uma especificação de tamanho de etapa (por exemplo, 1,8 ° ou 200 etapas por revolução), que se aplica a etapas completas. Um driver de microstepping, como o A4988, permite resoluções mais altas, permitindo localizações de etapas intermediárias, que são obtidas energizando as bobinas com níveis de corrente intermediários. For instance, driving a motor in quarter-step mode will give the 200-step-per-revolution motor 800 microsteps per revolution by using four different current levels.
The resolution (step size) selector inputs (MS1, MS2, and MS3) enable selection from the five step resolutions according to the table below. MS1 and MS3 have internal 100kΩ pull-down resistors and MS2 has an internal 50kΩ pull-down resistor, so leaving these three microstep selection pins disconnected results in full-step mode. For the microstep modes to function correctly, the current limit must be set low enough (see below) so that current limiting gets engaged. Otherwise, the intermediate current levels will not be correctly maintained, and the motor will skip microsteps.
Control inputs
pics 4 &5Each pulse to the STEP input corresponds to one microstep of the stepper motor in the direction selected by the DIR pin. Note that the STEP and DIR pins are not pulled to any particular voltage internally, so you should not leave either of these pins floating in your application.
If you just want rotation in a single direction, you can tie DIR directly to VCC or GND. The chip has three different inputs for controlling its many power states:RST, SLP, and EN. For details about these power states, see the datasheet.
Please note that the RST pin is floating; if you are not using the pin, you can connect it to the adjacent SLP pin on the PCB to bring it high and enable the board.
Current LImiting Before connecting the motor we should adjust the current limiting of the driver so that we are sure that the current is within the current limits of the motor. We can do that by adjusting the reference voltage using the potentiometer on the module to set the VRef.
See details on the video link pic. 6
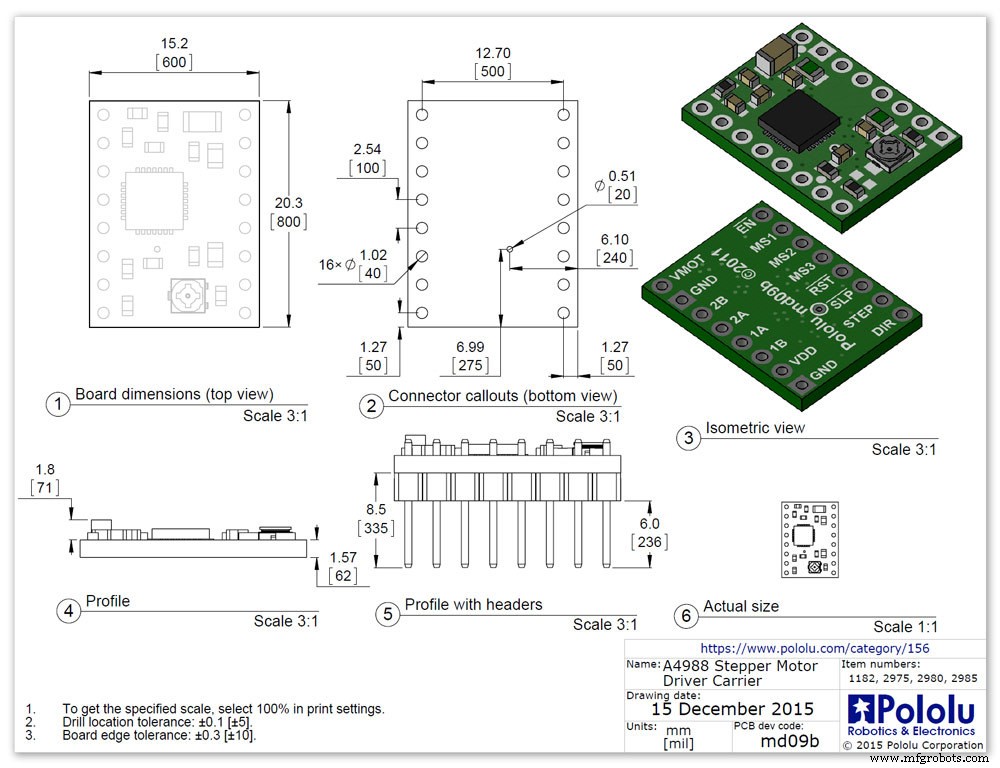
Manufacturers Drawing sheet pic.7
Step 13:Construction Prototyping
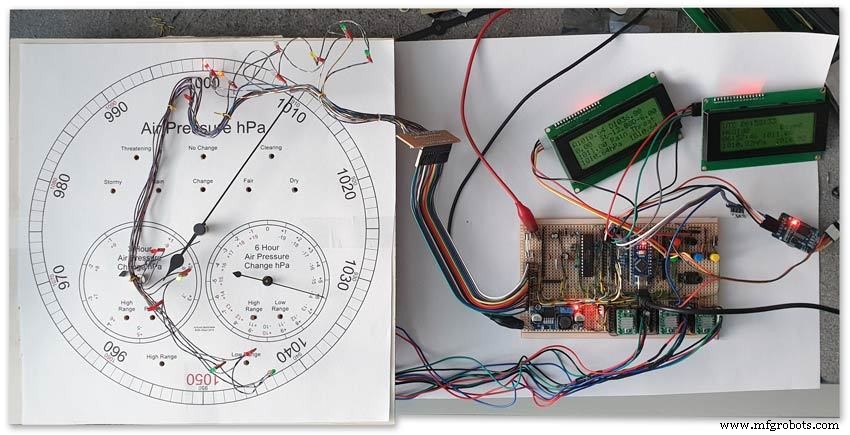
The circuit was prototyped using a hardboard dial with holes drilled for the motor spindles and LEDs.
Various dial designs were then printed on normal paper and Sellotaped over the top. The LED wiring loom was made with the LEDs in position on the temporary dial.
If you are using the round dial design this will allow you to check if the board etc will be mounted on the dial or in the back box.
Step 14:Construction RTC Modification
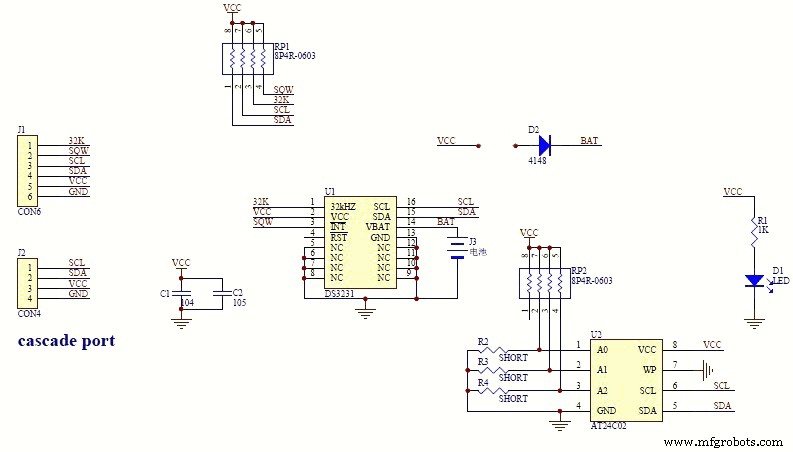
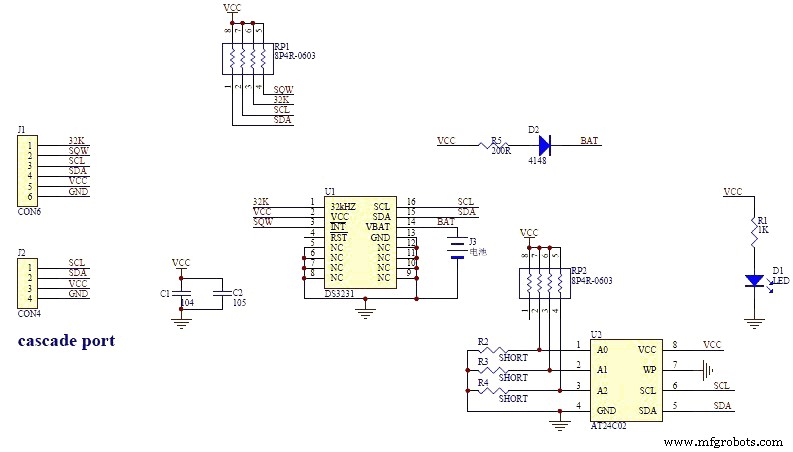
The module comes supplied with a Lithium-Ion rechargeable battery see diagram pic. 2
I use a non rechargeable battery (I am not happy with the circuit design with a lithium-iron battery and associated fire risk) of the so have removed resistor R5 from the module as below. This stops any charge current to the battery.
Pic.3 shows the module without the resistor (just break it off) and pic.4 the modified circuit.
Step 15:Construction Mounting Modules &Boards

On the modern square dial design all the modules and boards are mounted on the dial. The classic round dial desgn will need some parts mounted in the back box as there is less space on the dial.
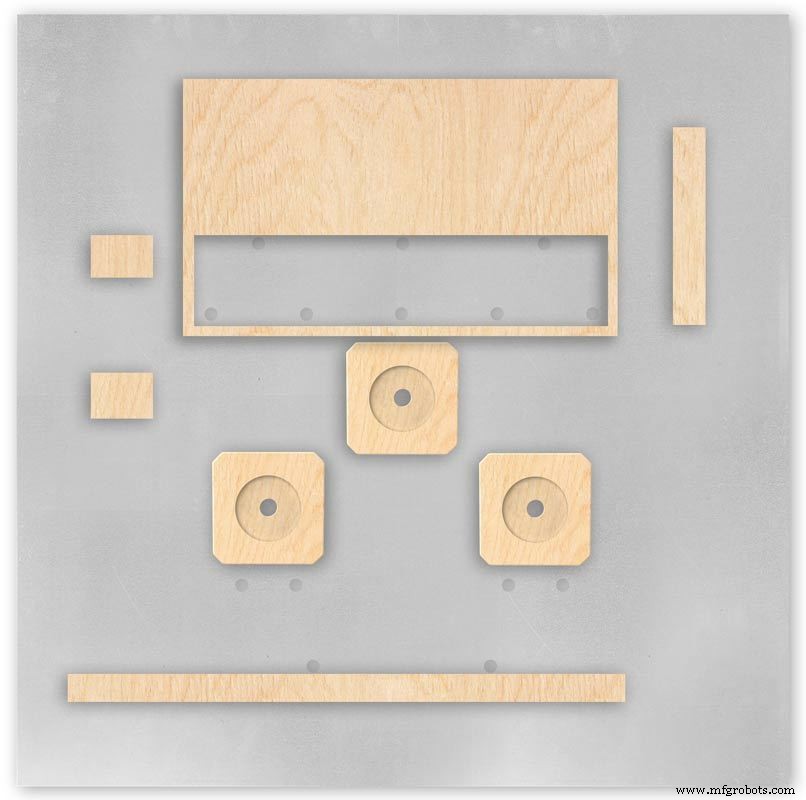
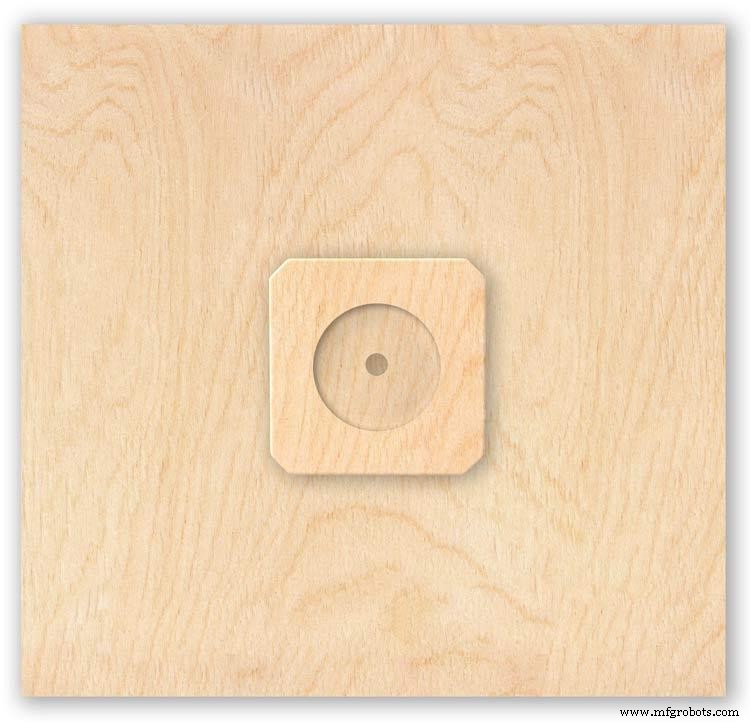
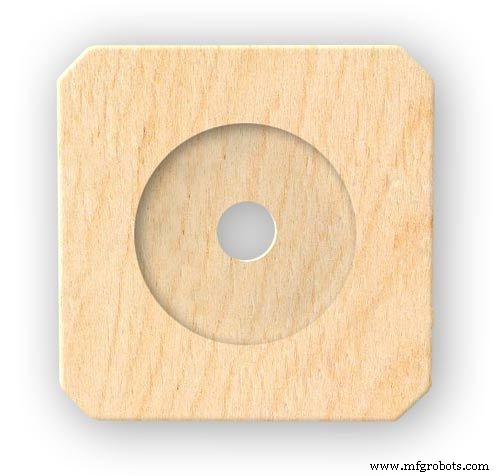
Motors are hot melt glued to wooden mounting blocks pic.1&2. The wooded blocks are cut fron a sheet of plywood pic.3. The mounting blocks depths are set to allow the correct protrusion of the spindles through the dial. I have hot melt glued the blocls to the dial.
The Vero Boards and LCD displays are also screwed to wooden blocks which have been glued to the dial using impact adhesive.
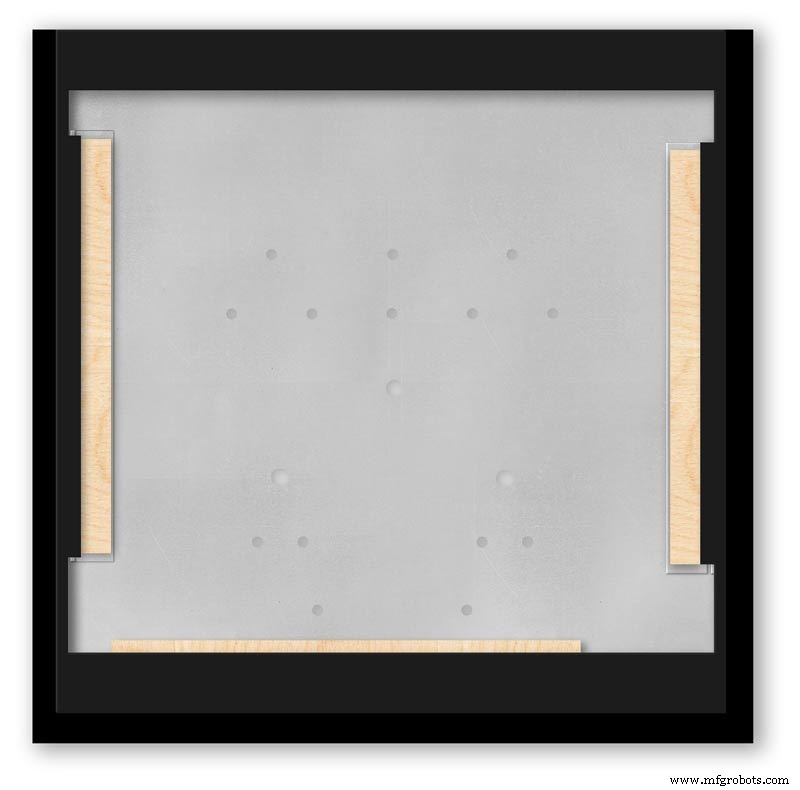
Pic.4 shows the front view with a transparent dial showing mounting locations.
Foto. 5 shows the same but the rear view.
Pic.6 shows the wooden mounting blocks locations and layout.
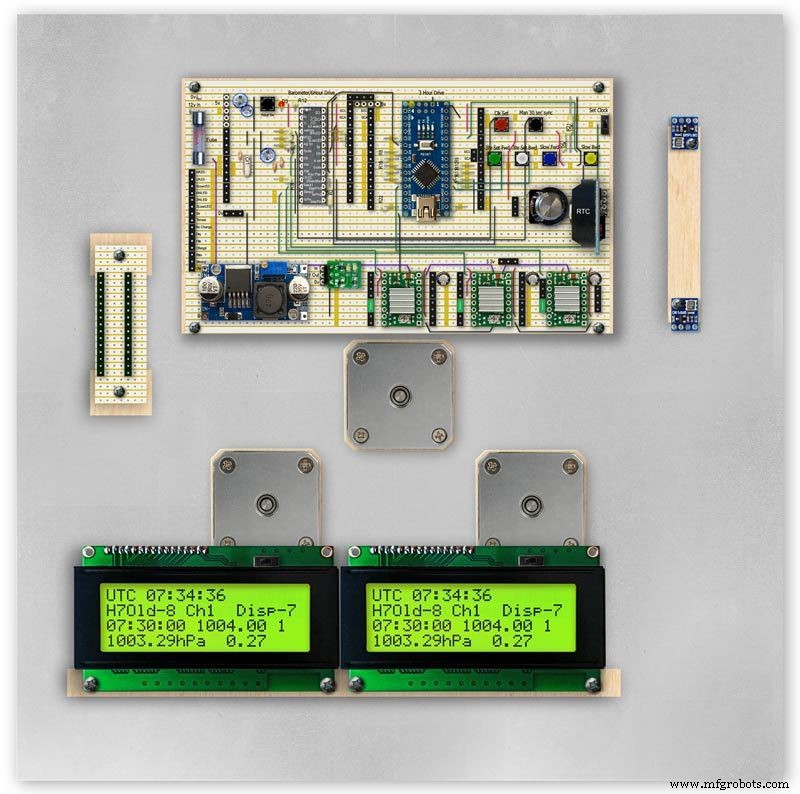
Pic.7 shows the modules and motors mounted on the blocks.
Step 16:Construction LED Fixing


The 3mm LEDs are mounted so they just show above the surface of the dial pic.1.
3mm holes are drilled and hot melt glue holds them in place.
To get a uniform depth I made a jig using a washer and piece of card glued to it pic.2.When fixing the LEDs the jig is pressed against the dial with the depth of the washer setting the protrusion of the LED through the dial.
Step 17:Construction Classic Style English Dial Clock Case




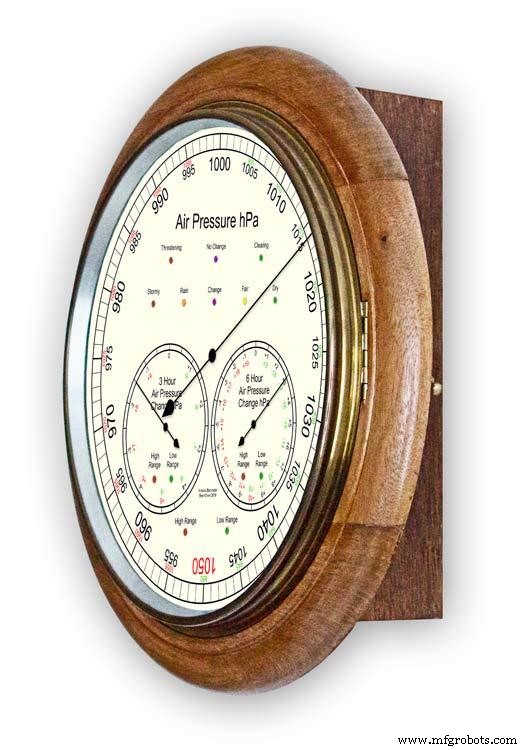

The classic 12" Dial Clock case can be purchased from Ebay as "case only" pic.1.
Various styles are available this one is oak and has a dial surround that hinges away from the back box pic.2.
This makes for a very easy build as all the hard work has been done. The dial is mounted by 3 small wood screws hidden behind the brass dial bezel.
This dial surround has been stripped and bleached to bring out the original light colour of the wood pic.3.The dial was removed as it had a winding hole off center.
A new dial was cut from a sheet of alluminium pic.4.
Pic.5 side view of the Barometer showing the back box.
Pic.6 shows my regulator clock case with original curved back box, hinged dial bezel and pegged dial surround.
Many of these clock cases were held in place by four wooden pegs. If your case is constructed like this add a pair of hinges to one side and use the remaining two pegs to lock the dial surround in place.
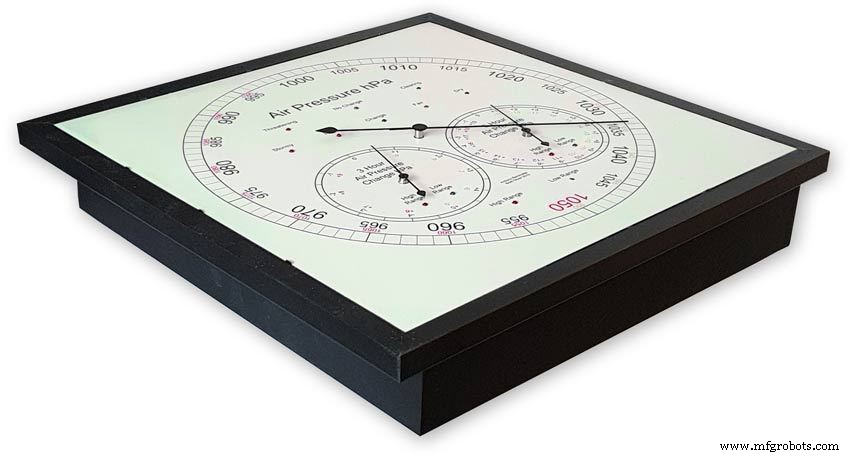
Step 18:Construction Modern Case

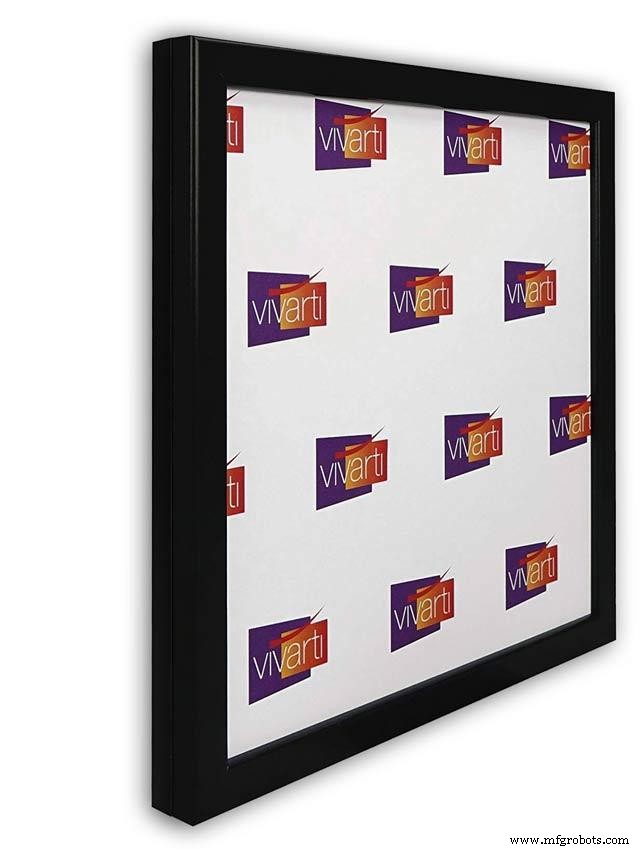
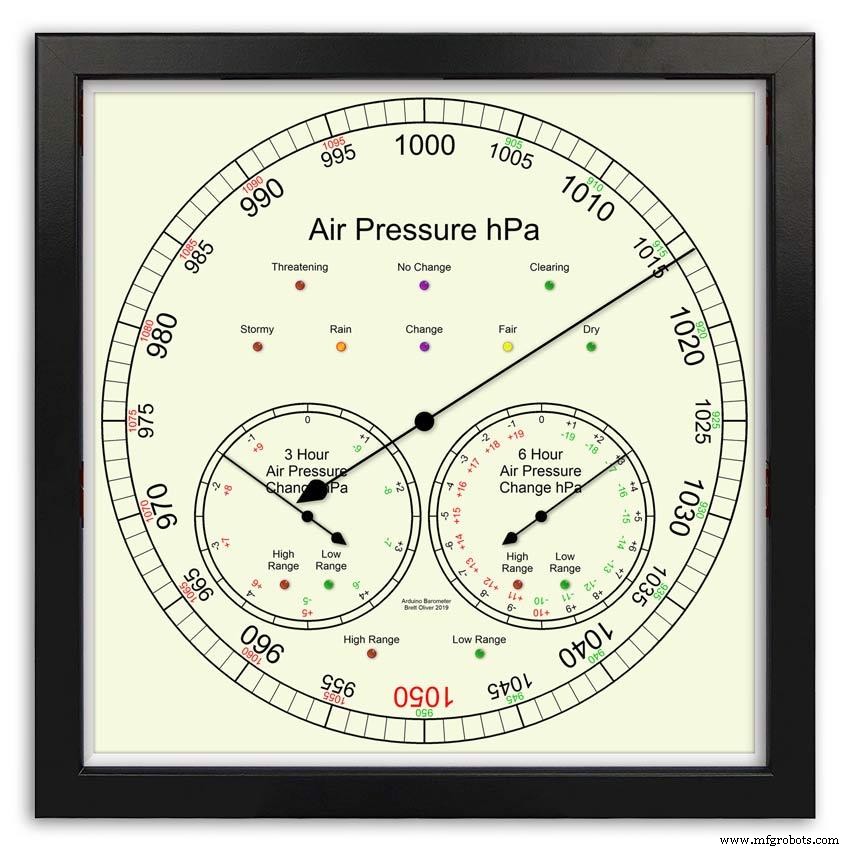


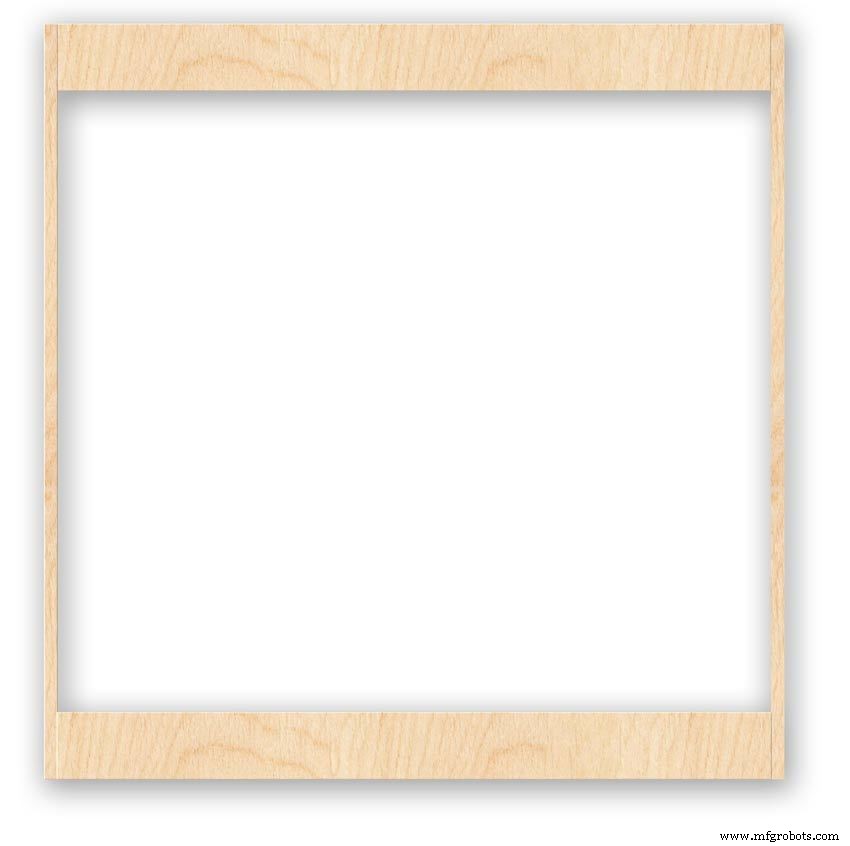
Picture Frame Version
I have used two identical picture frames mounted back to back. These frames are 30cm x 30cm approx. 12"x12" pic.1.
pic.2 Frames are joined back to back.
pic.3 This gives a double depth frame.
pic.4 Rear side view showing wired boards and modules.
pic.5 The dial viewed through the rear frame.
pic.6 Rear half of the frame with all wiring in place.
pic.7 The front of the dial now shows through the front half of the frame. Wooden bevels hide the space behind the front half of the frame.
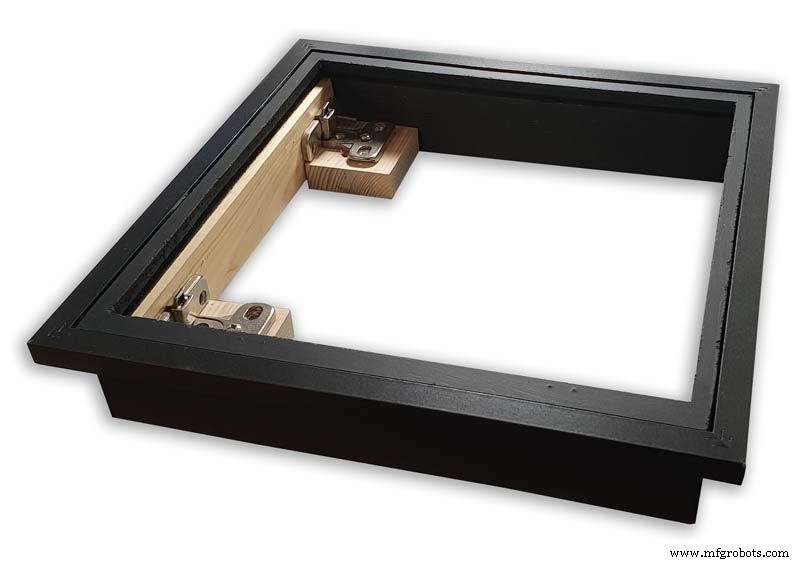
Step 19:Construction Modern Case Backbox

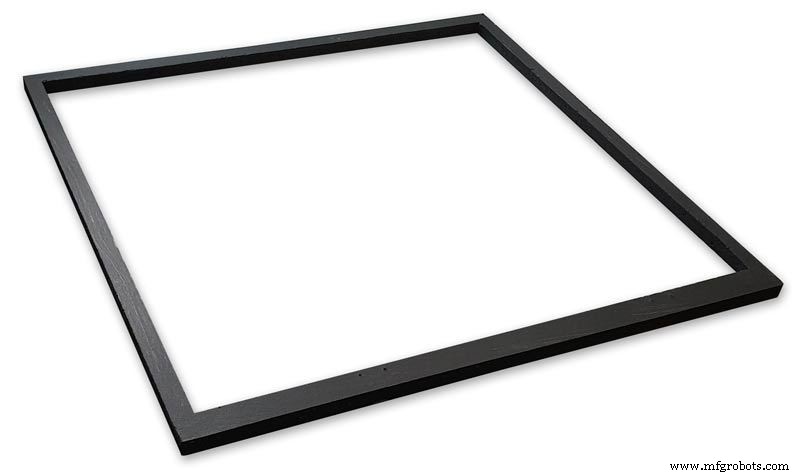

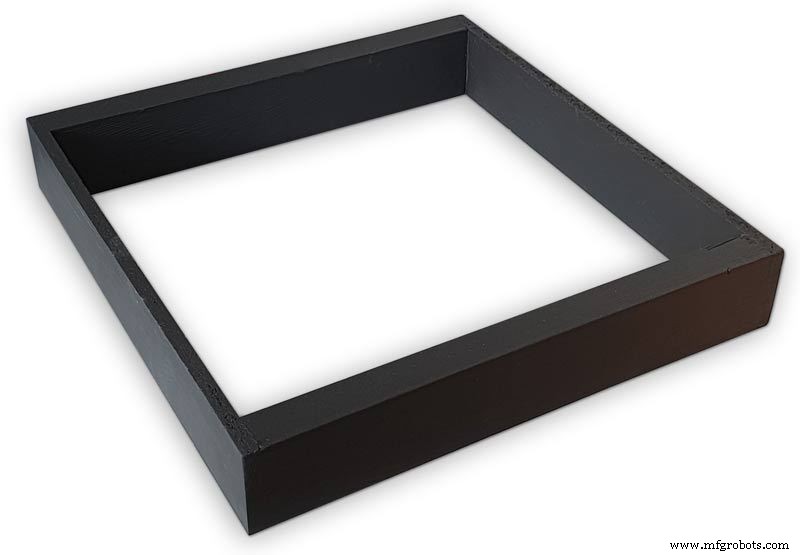

Back Box
Pic.1 The barometer is housed in a back box that is smaller than the dial frame on all side apart from the top. The fram overlap helps hide the back box and adds a shadow effect to the case on the wall.
Pic.2 The back box is 50mm deep and is simply constructed of glued and screwed wood.
Pic.3 Rear view of back box in position behind rear dial frame showing the frame overlap.
Pic.4 The screw holes are filled then a coat of matt black is applied to the back box.
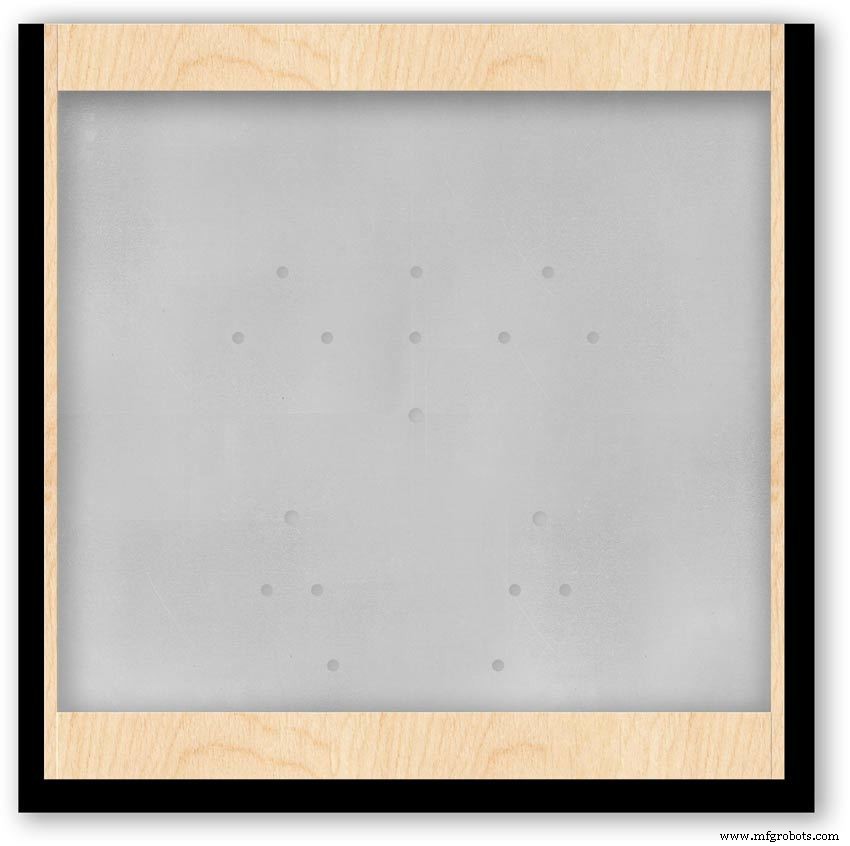
Pic.5 Back box with rear picture frame in place this holds the dial.Note the rear frame is placed upside down.
Pic.6 A spacer is cut the same size and depth as the recess of the picture frame.
Pic.7 The spacer is set under the dial.
Pic.8 This will raise the dial level with the top edge of the rear frame.
Pic.9 Back box with front picture frame in place on top of the rear frame.This frame holds the glass.
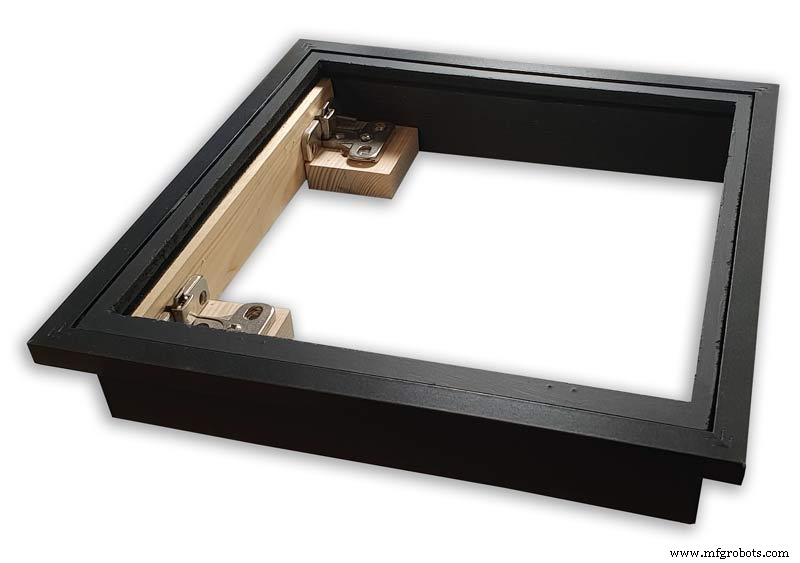
Step 20:Construction Modern Case Wall Mounting








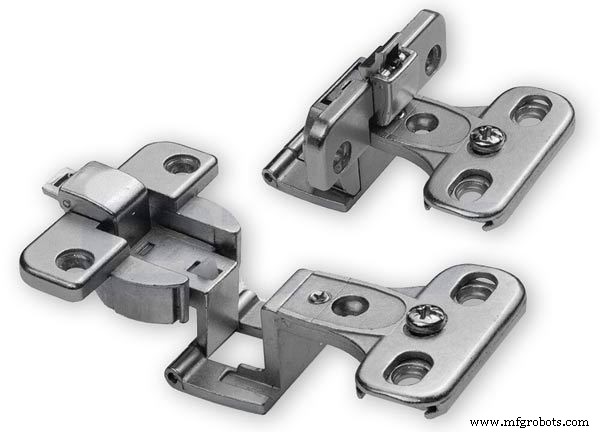
Mounting the Barometer
Pic.1 To allow access to the rear of the Barometer I have mounted it on a pair of GTV 270° inset hinges. The hinges are mounted on a block of wood fixed to the wall and allow the barometer to be swung out for access. The hinges also have a quick release function if the Barometer needs to be taken down for maintenance at any time. The hinge pivot is set back which also allows the top of the case to clear the wall when hinged out.
Pic.2 The hinges are mounted on wooden blocks screwed to the wall.
Pic.3 I have screwed and glued an extra piece of timber to the left hand side where the hinges will mount.This will add strength as all the weight of the clock will be on this side when the clock case is open. Two aluminium plates will cover the hinge holes.
Pic.4 Hinge blocks in place. Note these are bolted through the case rather than screwed.
Pic.5 Back Box mounted on the wall. The fixing screws also hold the hinge to the wooden mounting blocks The wooden baton on the right is also fixed to the wall and supports the top right hand corner of the back box. It also serves as a fixing point for the wall mount locking pins that holds the back box shut against the wall.
Pic.6 The back box is shown open with the wooden mounting blocks and batons fixed to the wall. The hole in the front edge of the baton aligns with a hole in the side of the back box. A steel pin is inserted here to lock the barometer shut against the wall.
Pic.7 Back box open allowing access to the LCD displays and setting switches.
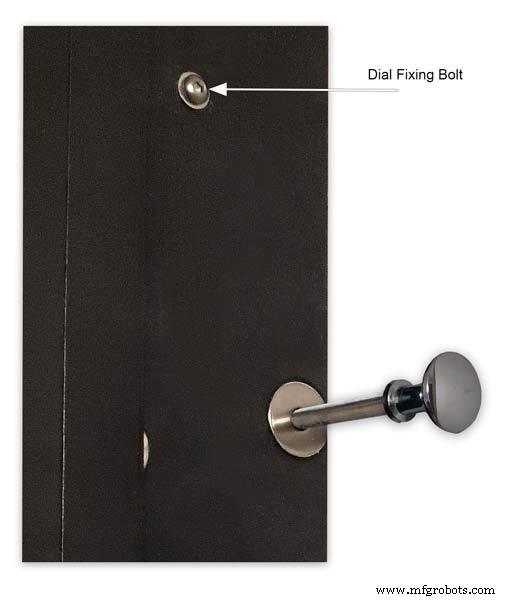
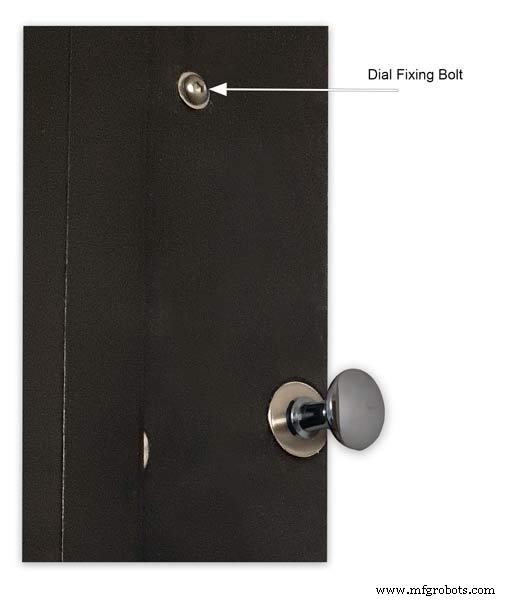
Pic.8 Steel Locking Pin This is a small cabinet knob with a length of treaded bar screwed into the thread.
Pic.9 &10 The locking pin when pushed fully in lock the barometer against the wall. When pulled out the barometer is able to swing out to allow access to the control switched and LCD displays.
Pic.11 Detail of Locking Pin and location of right side dial fixing bolt. I have glued a washer in place over the hole as an escutcheon plate.
Step 21:Construction Modern Case Dial Mounting



The dial and all the boards etc are removable for maintenance and is held to the backbox by 2 bolts.
Mounting the Dial in the Back Box
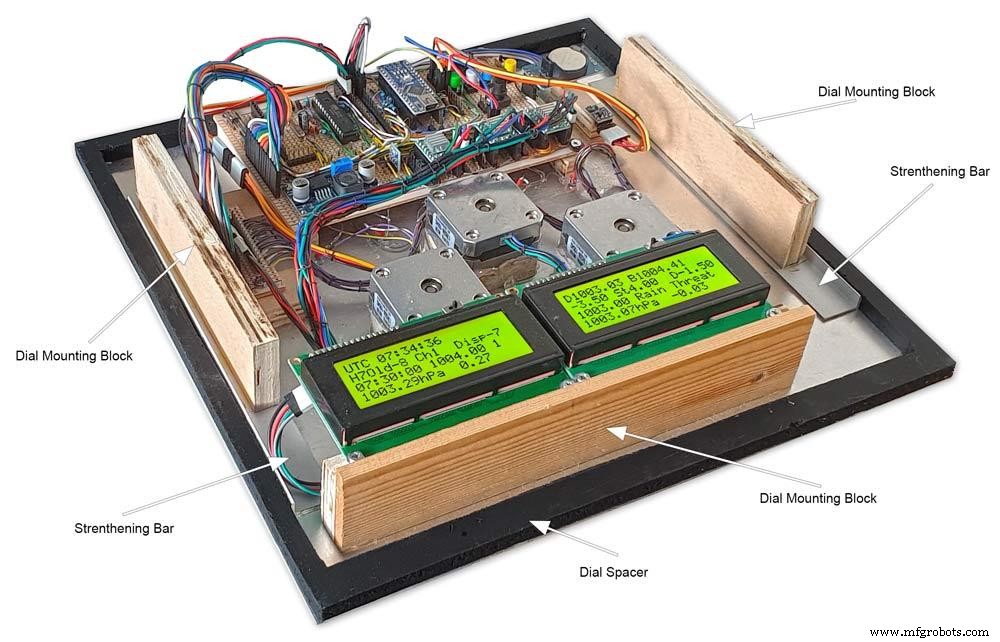
The dial holds the combined weight of all the stepper motors, boards and modules and is stiffened by impact gluing two strips of unequal aluminium angle to it's rear surface.Two blocks of wood are then glued to these bars and small screws then hold these wooden blocks through the side of the back box. A further thin strip of wood is glued to the dial below the LCD mounting block. This is not screwed to the case but sits on the back box to support the dial.
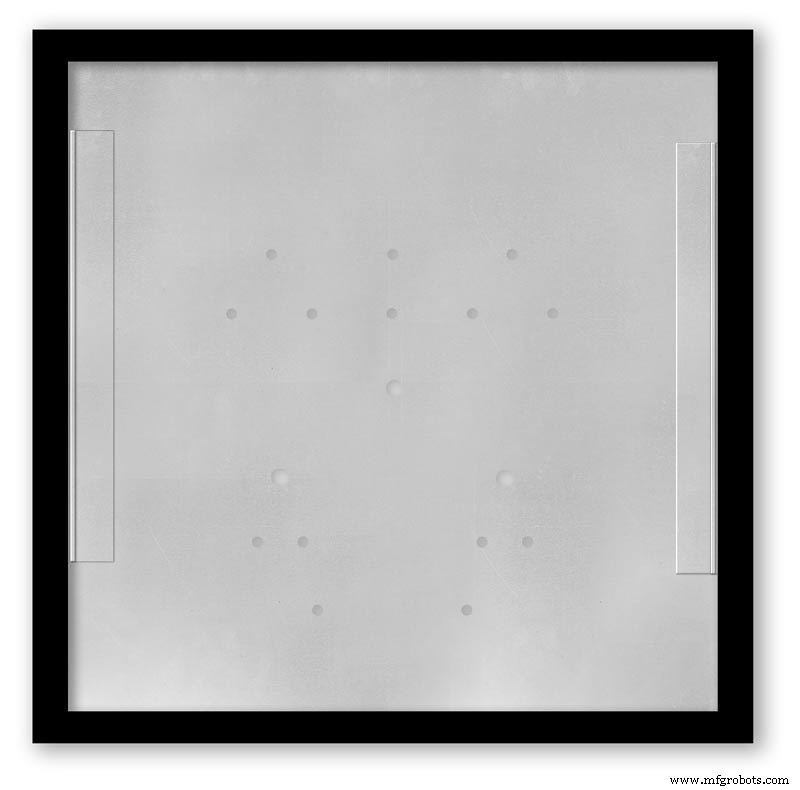
Pic.1 Strengthening bar of alluminium unequal angle.
Pic.2 Strengthening bar locations.
Pic.3 Glued wooden fixing/support blocks for dial fixing bolts left and right and glued dial support lower.
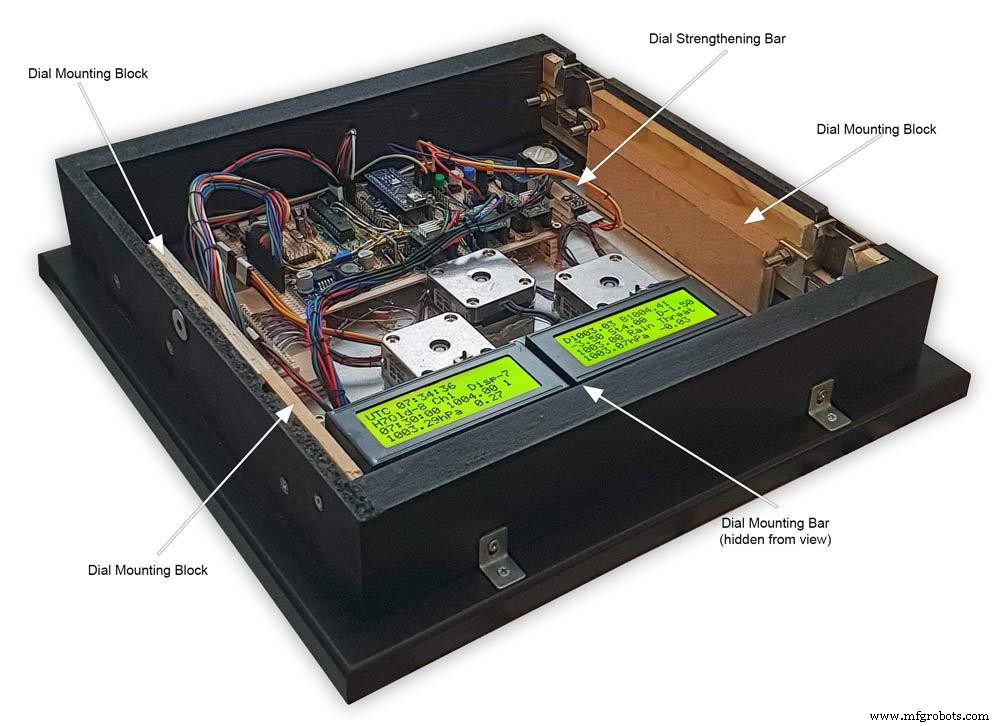
Pic.4 Shows contact/fixing points between the back box and dial. Back box in black with dial fixings/support in wood.
Pic.5 Rear view showing mounting block and bar locations.
Pic.6 Dial with Back Box Removed showing mounting blocks and strengthening bars glued to the rear of the dial.
The dial spacer allows the dial to sit flush with the top of the rear picture frame.
Pic.7 Right side of clock showing dial fixing bolt location.
Pic.8 A mount is constructed from 4 thin strips of wood and is placed in the recess of the front picture frame. This fills the gap between the picture frame and dial, holds the Perspex sheet in place and also adds a photo mount effect to the dial.
Pic.9 Mount in place behind the front picture frame.
Step 22:Contruction Dial

Pic.1 The dial is made from 1.5mm thick alluminium sheet and comes covered with a protective plastic film.
Pic.2 From your cad program print out the dial on A3 paper and include center marks for all the LED and stepper motor shaft holes.This will be your drill template.Lay the paper of the alluminium dial blank and tape the edges to stop it moving.Center punch all the holes through the paper.
Pic.3 Remove the paper template and drill out the holes 3mm for the LEDs and 3 larger holes for your stepper motor spindle.
Start with a small pilot hole and increase the drill size in 3 stages. If you are using a round dial mark it out on the projective film with a market pen and cut it out at this stage.
Pic.4 The protective plastic film can now be removed. Rub down the dial back and front to remove any burrs and to provide a key for the paint.
Pic.5 Spray a coat of acrylic primer and then your choice of top coat - I have used antique white.
I then give a final coat of matt clear acrylic. Leave to dry over night.
I have included a high res pic of the dial pic.6. Contact me if you need it in another format. My CAD format is TurboCad.
Step 23:Construction Dial Decal

Apply the water slide decal transfer.
I use Water Slide Decal paper from BIGBITE Studio They have some good tutorials on their site. https://www.bigbitestudio.co.uk/tutorials/water-decal-tutorials/
Pic.1 Water slide decals are printed out on an inkjet printer soaked in water then slid into place. They give a very detailed print and once given a coat of varnish are tough.
Don't forget to order transparent transfers so the dial colour can be seen through the transfer.Follow the instructions with the pack as they do vary.
Pic.2 On my transfers I print out the dial on transfer paper let it dry and then cut it out to just under the size of the dial. I then give it a coat of acrylic varnish.
I set my printer as follows:Plain Paper, Photo &High Speed Off This stops my printer from over inking the paper When the varnish is dry the transfer is soaked in water until the transparent transfer comes away from the white backing sheet.
Pic.3 Move the soaked transfer over the dial.
Pic.4 Slide the transfer into position.
Pic.5 Gently pull the white backing paper backward while holding the transfer down.
Make sure the crosses line up with the center of all the holes.
Pic.6 Get rid of any air bubbles.
Pic.7 Then leave it to dry before adding a coat of matt varnish.
After the coat of varnish break through the layer of transfer over the holes using the back of a drill bit jus smaller than the holes. Then give a final coat of varnish to seal the edges around the holes.
Step 24:Construction Hands



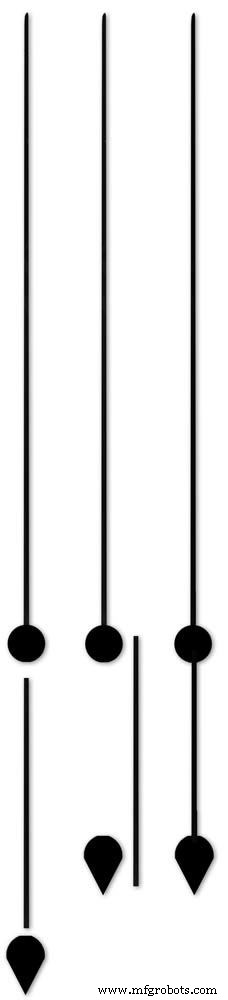






Hands are a very personnal choice and there are many diffent styles to choose from. The hardest part is finding hands that match each other. I found a perfect set of small hands but was unable to find a matching longhand for the main barometer. In the end I made my own from 3 donor hands.
All my hands were quartz second hands so I hand to file the mounting spindle off the back for mounting on the stepper motor spindle.
On some stepper motors the spindle can be drilled out to take the hand spindle but my spindles were too hard to drill.
Pic.1 my completed hands.
Pic.2 The long barometer hand was constructed from 3 different hands
Pic.3 To get the lower spade balance part of the hand I used a spade hand.
Pic.4 First I cut off the top using sharp scissors.
Pic.5 The top was then trimmed by cutting the point off.
Pic.6 The remaining part was then filed away to match the shape of the 2 smaller hands.
Pic.7 The completed balance for the hand.
Pic.8 To make the front pointer and center I cut the end off one off my donor hands.
Pic.9 To make the rear balance shaft I cut a section out of the 3rd donor hand.
Pic.10 Left the 3 parts of the new hand. Middle shows the overlap of the balance shaft to allow for bonding. Right pic shows the balance shaft bonded with impact adhesive to the underside of the balance and center shaft.
To fix the hands to the stepper motor spindle I did not want to use impact adhesive as the hands are fragile and would be damaged if I hand to remove them. In the end I went for a tiny bit of Blu Tack on each hand. Blu Tack is putty like and is non setting but seems to hold very well!
Step 25:Construction Schematic
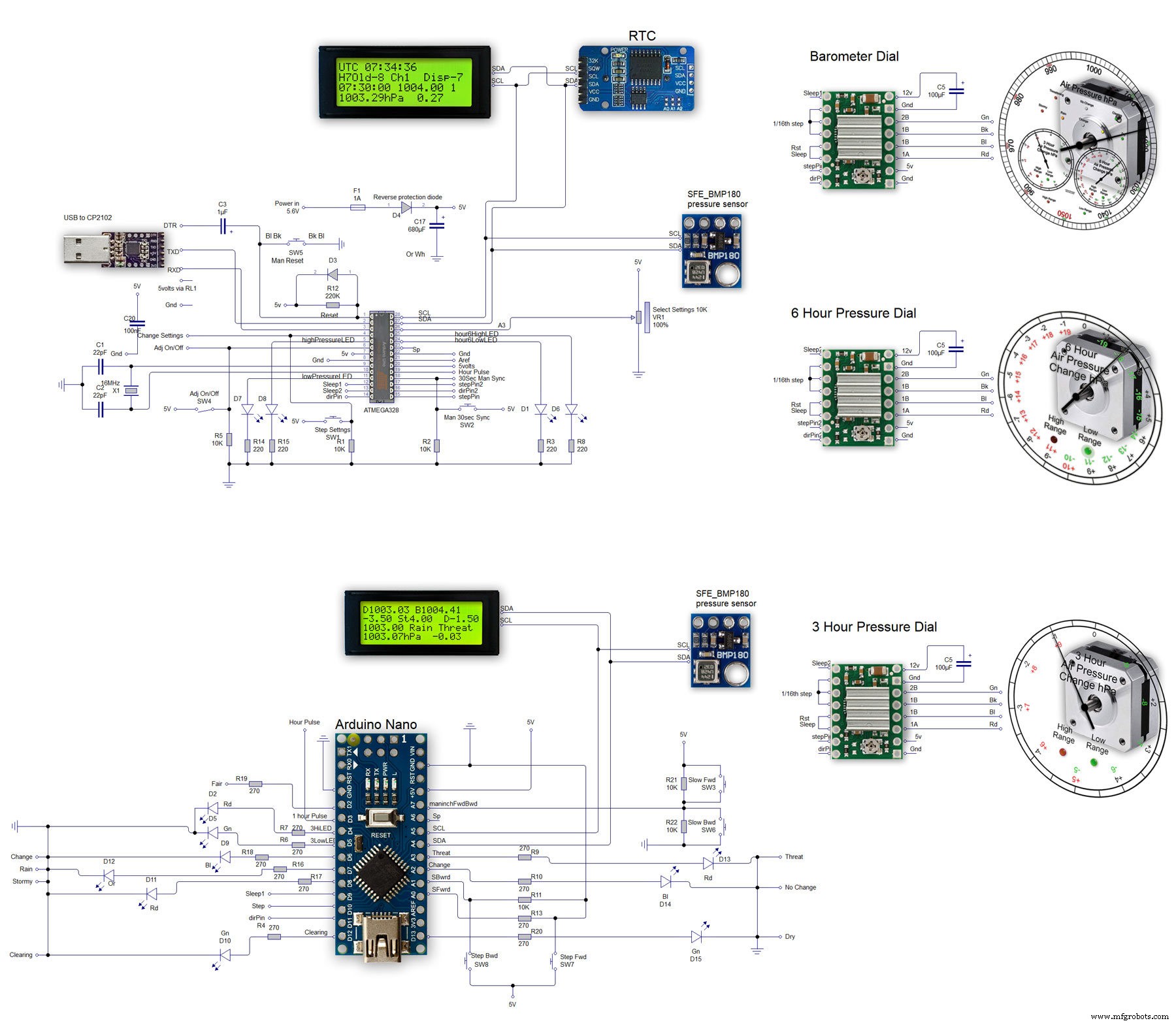
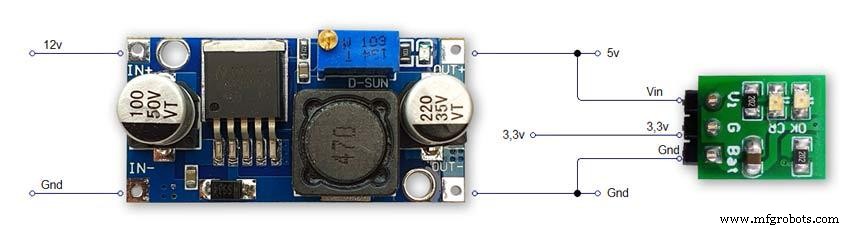
The main shematic is shown in Pic. 1 with the power supply in Pic.2.
You will also need a regulated plug in 12v supply adaptor of around 1amp.
Note I have fitted switches on the LCD displays to turn the backlight LEDs On and Off. This is optional but as the displays are not visible for 99.99% of the time it will save power.
Note larger schematics can be found on my web site here
Step 26:Construction Vero Board
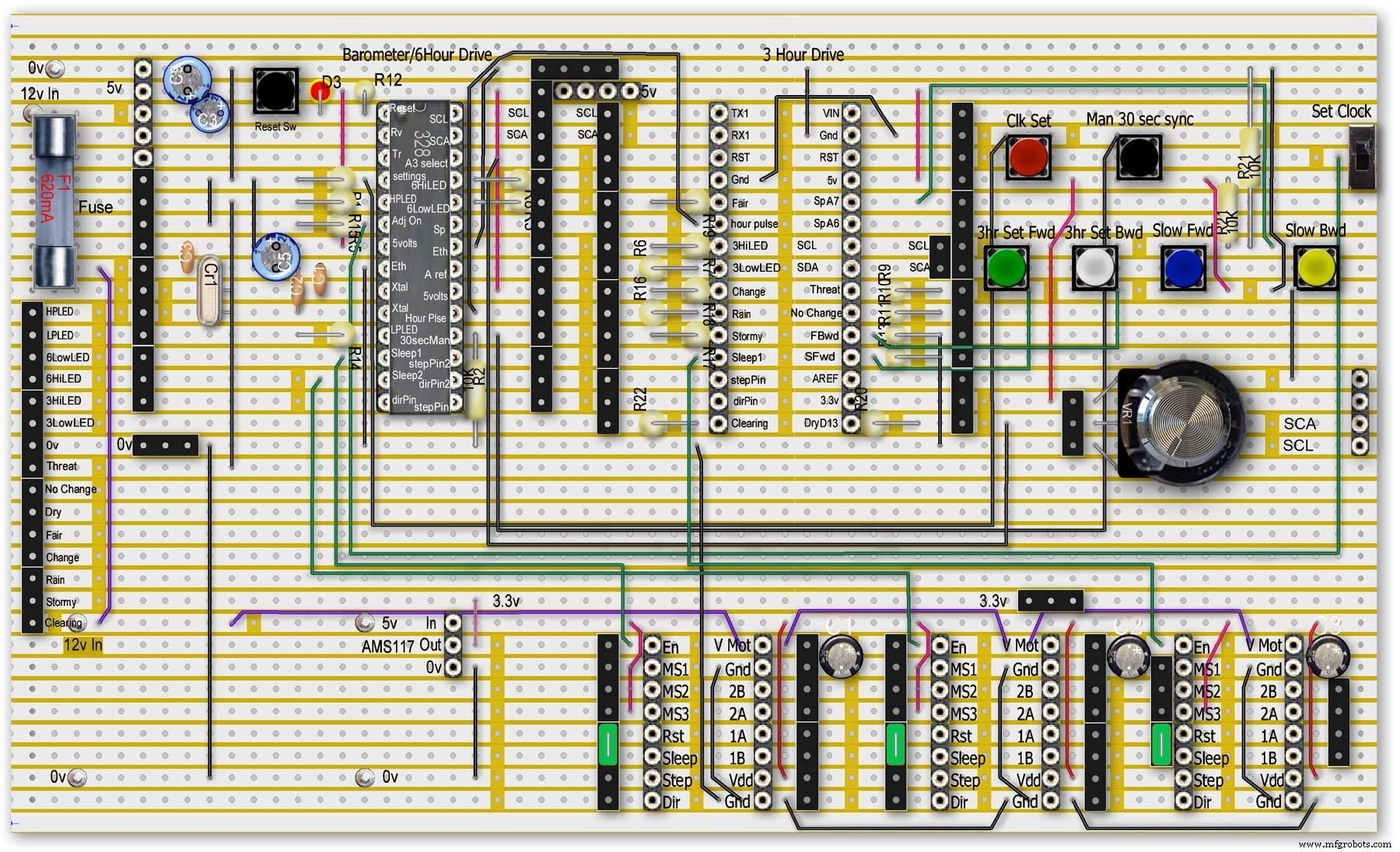
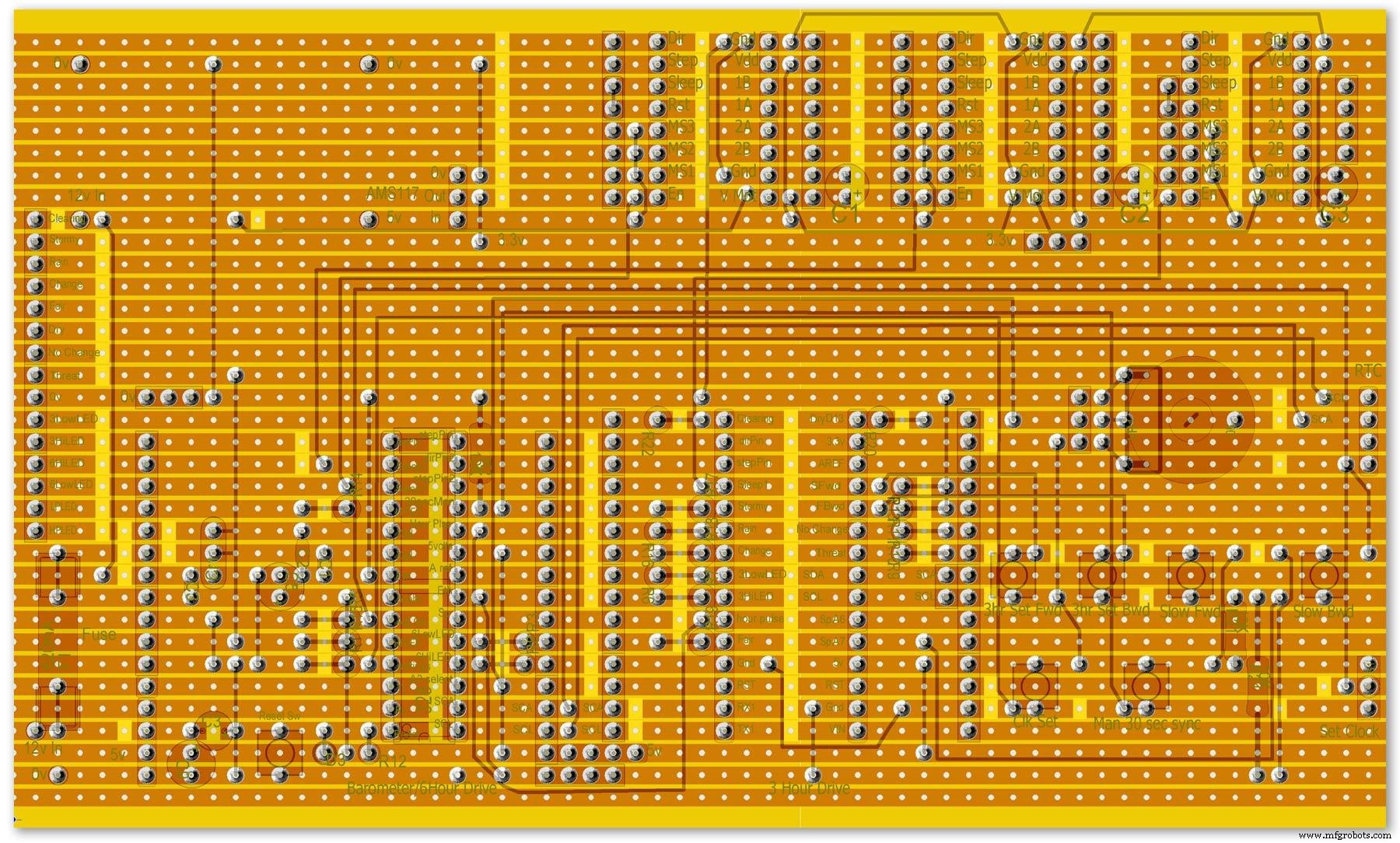

Vero Board Layouts
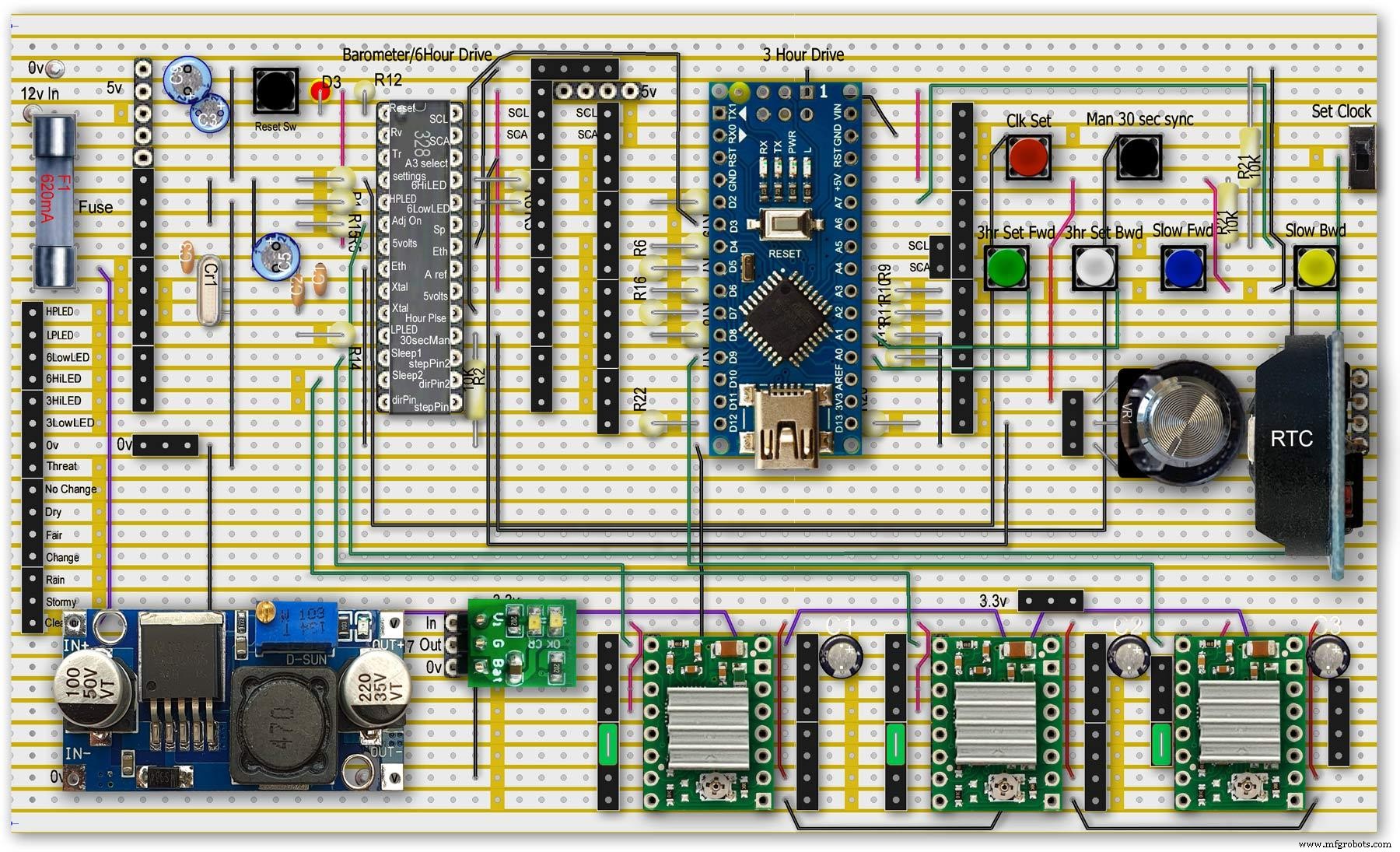
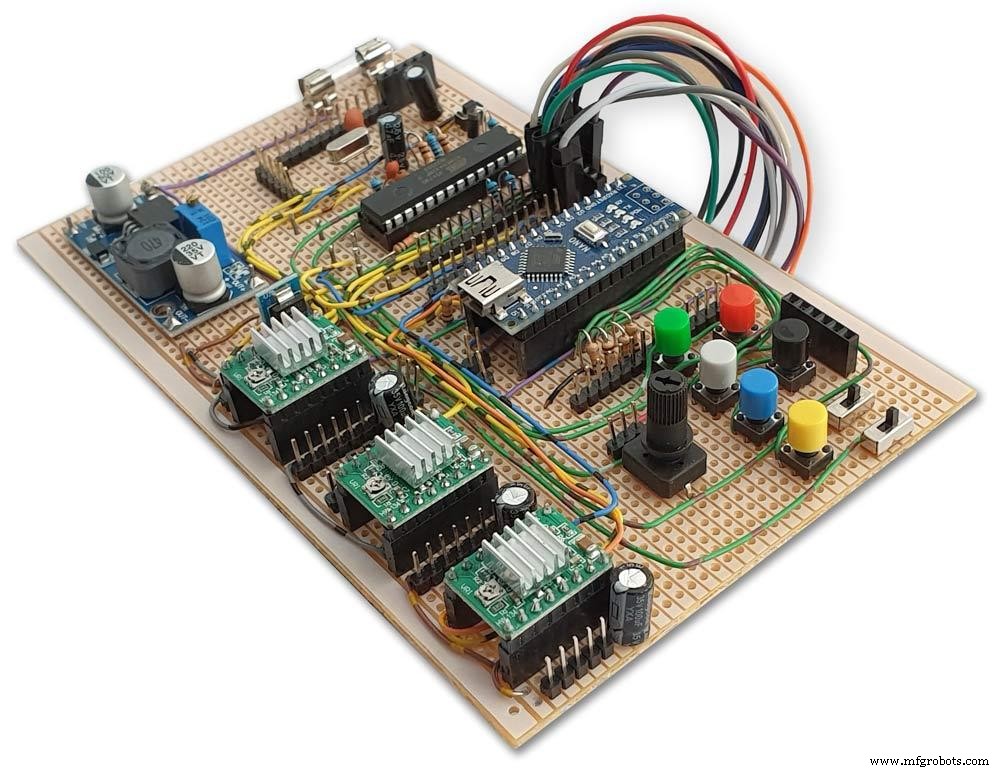
Pic.1 Vero Board with all modules removed.
Pic.2 Vero Board with modules in place.
Pic.3 Vero Board rear view (flipped down from top).
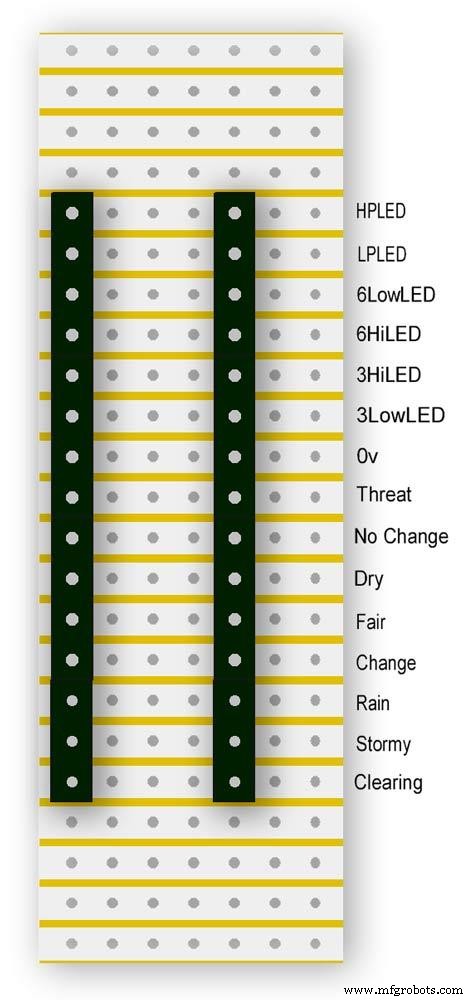
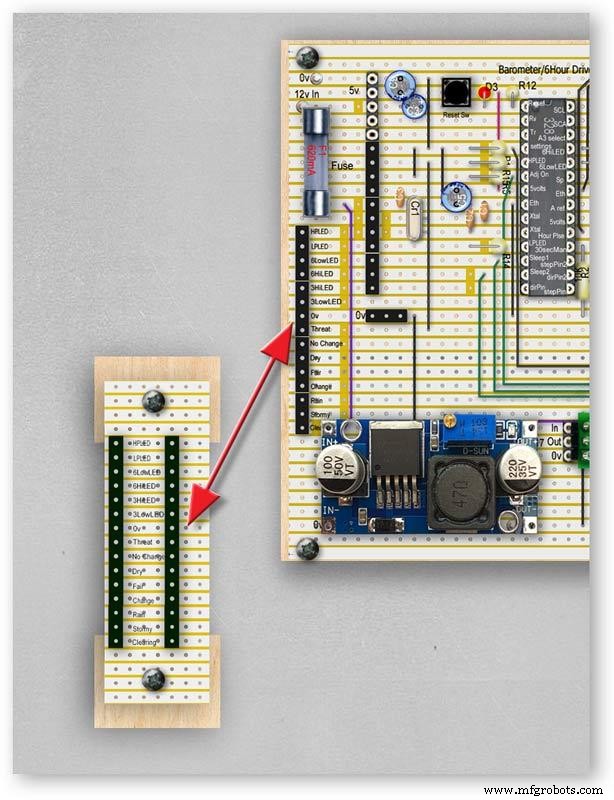
Pic.4 LED Vero Board
This board is used as a connection point for the dial LEDs. This allows the dial to be disconnected from the main board if required for maintenance.
Pic.5 The LED Vero Board connects to the main board with Dupont sockets and male Dupont cable
Pic.6 Vero Board wiring in progress.
Pic.7 Vero Boards and module location on the rear of the dial.
Step 27:Code
Código
There are 2 parts to the code 1 for the Main Barometer Code and 6 hour display and 1 for the 3 hour display and weather forecast.
Step 28:Time-Lapse Video
Time-Lapse Video showing rain radar and the Barometer predicting rain and a storm.
This is a 4K video so you should be able to see full details of the dial and forecast LEDs.
Código
- BarometerA4988_23.ino
- BarometerA4988_3hour__21.ino
BarometerA4988_23.inoArduino
Main file for Barometer and 6 hour display/* Example sketch to control a 28BYJ-48 stepper motor with ULN2003 driver board, AccelStepper and Arduino UNO:number of steps/revolutions. More info:https://www.makerguides.com v4 moved step 6 hour pressure step from void getpressure 1523 to main loop check every hour 365v5 remove unwamted step elementsv6 convert to diff display on 6 hr motorv8 modified hour change formula 1486v9 sleepv10 chnged high/low for EN control v11 chenge calc for hour change 1380v12 added calcCurrentDisp (); to calc current time from line 1384v13 removed 30 sec syncv14 air pressure extremes LEDsv15 add hour diff hour calc etc to row 1 when not on settingsv16 adding 16th stepsv17 errorv18 change min pulse to hour pulse on the hour + 1minv19 check enable and sleepsv20 added DAC to NANO so pins changed on 328 to match (analogue and digital swapped A6 D3 - deleted v20 also changed Low range hi range to both light above 19 or -19v21 same as 20 with serial print removedv23 notes added LCD display info added to startup */#include//SFE_BMP180 pressure sensor#include #include #include // ######## You will need to create an SFE_BMP180 object, here called "pressure":SFE_BMP180 pressure;#define ALTITUDE 118.0 // Altitude of Kenley Surrey in meters// also used to adjust/sync/calibrate to nearby weather station/3 hour display//#########//**********************// set the LCD address to 0x27 for a 20 chars 4 line display// Set the pins on the I2C chip us ed for LCD connections:// addr, en,rw,rs,d4,d5,d6,d7,bl,blpolLiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // Set the LCD I2C address#define DS3231_I2C_ADDRESS 0x68// Convert normal decimal numbers to binary coded decimalbyte decToBcd(byte val){ return( (val/10*16) + (val%10) );}// Convert binary coded decimal to normal decimal numbersbyte bcdToDec(byte val){ return( (val/16*10) + (val%16) );}// Include the AccelStepper library:#include // Define stepper motor connections and motor interface type. Motor interface type must be set to 1 when using a driver:#define dirPin 8#define stepPin 9#define dirPin2 10#define stepPin2 11#define motorInterfaceType 1// Create a new instance of the AccelStepper class:AccelStepper stepper =AccelStepper(motorInterfaceType, stepPin, dirPin);//barometer motorAccelStepper stepper2 =AccelStepper(motorInterfaceType, stepPin2, dirPin2);// 6 hour motorfloat seaPressure =0;float pressureNow =0;float pressurePrevious =0;float pressureDiff =0;int checkStop =0;int pressureRndDiff =0;int pressureRndNow =0;int pressureRndPrevious =0;int adjustOn =4; // allows adjustment of barometer// int test =0; // test mode 0 off 1 is onchar status; double T,P,a;//int h =0;//int m =0;//int j =0;int stepcount =0;int time =0;int resetmins =1;int secondNow =0;int secondPrevious=0;int minuteNow =0;int minutePrevious=0;int hourNow =0;int hourPrevious=0;int hourNow1=0;int hourPrevious1=0;int initial =0;int initial1 =0;int initial3 =0;int highPressureLED =3;int lowPressureLED =5;int hour6LowLED =15;int hour6HighLED =16;int manSync =12; // resets seconds to 30 secondsint changeSetting =2;int syncStop =0;int sync30Stop =0;int stepoffHour =0;int stepoffHourbkw =0;int stepoffMin =0;int stepoffMinbwd =0;int stepoffRTCminfwd =0;int stepoffRTCminbwd =0;int stepoffRTChourfwd =0;int stepoffRTChourbwd =0;int settingreadPin =A3; //Pin for sensing analogue value from potint settingVal =0; // Analogue value 0-1023int LCDstop =0; // stops settings on LCD display refreshing until they changeint hourPulse =13; //min pulse for seconds display was 14int adjustLock =0; // turns off adjust lockint hourcalc =0; // number from 0 to 7 representing the 8 hours of stored pressure readings int hourDiff =0; // used to check if 6hour previous motor should be stepped.int hourChange =0; // the amount of 6 hour to stepint currentDisplay =0; //current 6hour change readingint hour0 =1013; // you can set last 8 hours pressure here or leave at 0 and theint hour1 =1014; // readings will catch up over the next 8 hoursint hour2 =1015;int hour3 =1016;int hour4 =1016;int hour5 =1016;int hour6 =1012;int hour7 =1013;int sleep1 =6;int sleep2 =7;// check air pressure here https://www.meteoplug.com/cgi-bin/meteochart.cgi?draw=a3aeaaa1acbdf9f1fcfed4fedbc2c094c0d6d6d1d2c5edcebbfee9ffeff1fbf9//int Disp3hrIn =A3;//int Disp3hrVal =0;void setup() { pinMode(adjustOn, INPUT); pinMode(hourPulse, OUTPUT); pinMode(highPressureLED, OUTPUT); pinMode(lowPressureLED, OUTPUT); pinMode(hour6LowLED, OUTPUT); pinMode(hour6HighLED, OUTPUT); pinMode(manSync, INPUT); pinMode(sleep1, OUTPUT); pinMode(sleep2, OUTPUT); pinMode(settingreadPin, INPUT); // Set the maximum steps per second:stepper.setMaxSpeed(1000); stepper2.setMaxSpeed(1000); lcd.begin(20,4); // initialize the lcd for 20 chars 4 lines, turn on backlight lcd.backlight(); // backlight on not needed as man controlled lcd.setCursor(0,0); //Start at character 0 on line 0 lcd.print("Barometer A988"); //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ lcd.setCursor(0,1); //Start at character 0 on line 1 lcd.print(" Version 23"); //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ { Wire.begin(); Serial.begin (9600); // set the initial time here:// DS3231 seconds, minutes, hours, day, date, month, year // setDS3231time(10,42,9,5,18,12,19);//delay(2000);lcd.clear();}Serial.println("REBOOT");// serial removed // Initialize the sensor (it is important to get calibration values stored on the device). if (pressure.begin()) Serial.println("BMP180 init success");// serial removed else { // Oops, something went wrong, this is usually a connection problem, // see the comments at the top of this sketch for the proper connections. Serial.println("BMP180 init fail\n\n");// serial removed while(1); // Pause forever. } //LED TestdigitalWrite(hour6HighLED, HIGH);delay (500);digitalWrite(hour6HighLED, LOW);digitalWrite(hour6LowLED, HIGH);delay (500);digitalWrite(hour6LowLED, LOW);digitalWrite(highPressureLED, HIGH);delay (500);digitalWrite(highPressureLED, LOW);digitalWrite(lowPressureLED, HIGH);delay (500);digitalWrite(lowPressureLED, LOW);delay (500);lcd.clear();getPressure ();// gets all pressure readings// Disp readings on startup so hands can be set lcd.setCursor(0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print("H"); lcd.print(hourcalc); lcd.setCursor(2,1); lcd.print (""); lcd.setCursor(2,1); lcd.print("Old"); lcd.print(currentDisplay); lcd.setCursor(13,1); lcd.print (""); lcd.setCursor(13,1); lcd.print("Disp"); lcd.print(hourDiff); //disable motors on startupdigitalWrite(sleep1, HIGH);digitalWrite(sleep2, HIGH);stepper.disableOutputs();stepper2.disableOutputs();// test =1; // test set to 0 off 1 on}void loop() { if( digitalRead(adjustOn) ==HIGH || adjustLock ==1)// only alow settings when change settings switch is ON{ //digitalWrite(sleep1, LOW);//enable on //digitalWrite(sleep2, LOW);//enable on only enable outputs for 2 mins Settings(); //set what function the setiing switches have adjustLock =1; //hold on adjustment if( digitalRead(adjustOn) ==LOW){//digitalWrite(sleep1, HIGH);//disable on//digitalWrite(sleep2, HIGH);//enable on only enable outputs for 2 minsadjustLock =0; //hold on adjustment } }// only allow settings change when setting switch is on // displayTime(); // display the real-time clock data on the Serial Monitor, byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year);//@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ //enable air pressure readings if (minute ==9 || minute ==19 || minute ==29 || minute ==39 || minute ==49 || minute ==59 &&second ==59) { checkStop =0;// resets checkstop to allow air pressure readings every 10 mins }//check air pressure every 10 mins if (checkStop ==0) { if ( minute ==0 || minute ==10 || minute ==20 || minute ==30 || minute ==40 || minute ==50 ) { //digitalWrite(sleep1, LOW);//enable on -only enable outputs for 1 min // only sleep1 needs activation getPressure ();// gets all pressure readings checkStop =1;// stops multiple readings of air pressure }// else //digitalWrite(sleep1, HIGH);//enable off // Serial.print("Sleep 1 HIGH (off) "); // Serial.println(hourChange); } //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@if(digitalRead(manSync)==HIGH)// resets seconds to 30{ setDS3231time(30, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC } // counts seconds secondNow =second; if(secondNow!=secondPrevious || initial) { lcd.setCursor(0,0); lcd.print("UTC "); if(hour<10) { lcd.print(0); } lcd.print(hour); lcd.print (":"); if(minute<10) { lcd.print(0); } lcd.print(minute); lcd.print (":"); if(second<10) { lcd.print(0); } lcd.print(second); lcd.print (""); // Serial.print("-1*0 ");// Serial.println(-1*0); initial =0; secondPrevious =secondNow; } // count minutes minuteNow =minute; if(minuteNow!=minutePrevious || initial) //settingVal <690 stops clock motors operating when setting RTC { initial =0; minutePrevious =minuteNow; // digitalWrite(minPulse,HIGH);//1 min pulse for seconds display sync syncStop =0;// clock will not sync again untill a new minute has started. // digitalWrite(minPulse,LOW);//1 min pulse for seconds display sync } // counts hours + 1min for hourPulse at 15 seconds past the hour this allows barometer and 6 hour dial to step first if ( minute ==0 &&second ==15) // send hour pulse 15 seconds past the hour to 3 hour circuit allows other motors to stop { digitalWrite(hourPulse,HIGH); digitalWrite(highPressureLED,HIGH); // Serial.println("hourPulse Hi "); } else if (minute !=1 || second !=0) { digitalWrite(hourPulse,LOW);digitalWrite(highPressureLED,LOW); }// counts hours hourNow =hour; if ((minute ==59 &&second> 50) || (minute ==0 &&second <10) )// allows change on the hour only {// digitalWrite(sleep2, LOW);// enable 6hr motor if(hourNow!=hourPrevious || initial) //settingVal <690 stops clock motors operating when setting RTC { initial =0; hourPrevious =hourNow;//print hour stores every hour // serial removed /* Serial.print("hour0 "); Serial.println(hour0); Serial.print("hour1 "); Serial.println(hour1); Serial.print("hour2 "); Serial.println(hour2); Serial.print("hour3 "); Serial.println(hour3); Serial.print("hour4 "); Serial.println(hour4); Serial.print("hour5 "); Serial.println(hour5); Serial.print("hour6 "); Serial.println(hour6); Serial.print("hour7 "); Serial.println(hour7); */ //##############################################################################//step 6 hour motorif (hourChange> 0 &&hourChange <40) // 6 hour motor will not step if diff> 10 { stephourFwd(); //Serial.print("Step 6 hour Forward ");// serial removed // Serial.println(hourChange);// serial removed hourChange =0; } else if (hourChange <0 &&hourChange> -40) // else if (hourDiff ==-1 || test ==1) { stephourBwd(); // Serial.print("Step 6 Hour Backward ");// serial removed // Serial.println(hourChange);// serial removed hourChange =0; } // hourChange =0; //############################################################################## } // digitalWrite(sleep2, HIGH);// disable 6hr motor// add LCD stop if(second==0) { // lcd.setCursor(0,1); //lcd.print(" "); lcd.setCursor (0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print("H"); lcd.print(hourcalc); lcd.setCursor(2,1); lcd.print (""); lcd.setCursor(2,1); lcd.print("Old"); lcd.print(currentDisplay); lcd.setCursor(13,1); lcd.print (""); lcd.setCursor(13,1); lcd.print("Disp"); lcd.print(hourDiff); } } } // Set Clock/Motors###################################################################################################//gets advance retard settings from potvoid Settings(){ settingVal =analogRead(settingreadPin); // read the value from the pot if ( settingVal>=0 &&settingVal <85 ) { setMinsfwd(); } if ( settingVal>=85 &&settingVal <170 ) { setMinsbwd(); } if ( settingVal>=170 &&settingVal <255 ) { setMinsslowfwd(); } if ( settingVal>=255 &&settingVal <340 ) { setMinsslowbkd(); } if ( settingVal>=340 &&settingVal <425 ) { setHoursfwd(); } if ( settingVal>=425 &&settingVal <510 ) { setHoursbwd(); } if ( settingVal>=510 &&settingVal <595 ) { setHoursslowfwd(); } if ( settingVal>=595 &&settingVal <690 ) { setHourslowbkd(); } if ( settingVal>=690 &&settingVal <765 ) { setRTCfwdmin(); } if ( settingVal>=765 &&settingVal <850 ) { setRTCbwdmin(); } if ( settingVal>=850 &&settingVal <900 ) { setRTCfwd(); } if ( settingVal>=900 &&settingVal <970 ) { setRTCbwd(); }if ( settingVal>=970 &&settingVal <1025 ) { } if ( settingVal>=0 &&settingVal <85 &&LCDstop==0)// LCDstop prevents the LCD from freshing until another item is selected { lcd.setCursor(0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print("Barometer Advance"); LCDstop=1; } if ( settingVal>=85 &&settingVal <170 &&LCDstop==1) { lcd.setCursor(0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print("Barometer Retard"); LCDstop=0; } if ( settingVal>=170 &&settingVal <255 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print("Baro Inch Advance"); LCDstop=1; } if ( settingVal>=255 &&settingVal <340 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print("Baro Inch Retard"); LCDstop=0; } if ( settingVal>=340 &&settingVal <425 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print("6Hr Baro Advance"); LCDstop=1; } if ( settingVal>=425 &&settingVal <510 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print("6Hr Baro Retard"); LCDstop=0; } if ( settingVal>=510 &&settingVal <595 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print("6Hr Baro Inch Advn"); LCDstop=1; } if ( settingVal>=595 &&settingVal <690 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print("6Hr Baro Inch Retard"); LCDstop=0; } if ( settingVal>=690 &&settingVal <765 &&LCDstop==0) { lcd.setCursor(0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print("RTC Min Advance"); LCDstop=1; } if ( settingVal>=765 &&settingVal <850 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print("RTC Min Retard"); LCDstop=0; } if ( settingVal>=850 &&settingVal <900 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print("RTC Hour Advance"); LCDstop=1; } if ( settingVal>=900 &&settingVal <970 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print("RTC Hour Retard"); LCDstop=0; } if ( settingVal>=970 &&settingVal <1025 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print (""); lcd.setCursor (0,1); lcd.print ("DESLIGADO"); LCDstop=1; } }// END of Loop// set RTC min forward 1 min per press ##################################################################################void setRTCfwdmin(){ if( digitalRead(changeSetting) ==HIGH &&stepoffRTCminfwd ==0 ) { byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year); minute =minute+1; if (minute ==60) { minute =0; } setDS3231time(second, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC stepoffRTCminfwd =1; } if( digitalRead(changeSetting) ==LOW ) { stepoffRTCminfwd =0; }}//##################################################################################// set RTC min backward 1 min per press ##################################################################################void setRTCbwdmin(){ if( digitalRead(changeSetting) ==HIGH &&stepoffRTCminbwd ==0 ) { byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year); minute =minute-1; if (minute <1) { minute =59; } setDS3231time(second, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC stepoffRTCminbwd =1; } if( digitalRead(changeSetting) ==LOW ) { stepoffRTCminbwd =0; }}//##################################################################################//###################################################################################################// set RTC hour forward 1 hour per press ##################################################################################void setRTCfwd(){ if( digitalRead(changeSetting) ==HIGH &&stepoffRTChourfwd ==0 ) { byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year); hour =hour+1; setDS3231time(second, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC stepoffRTChourfwd =1; } if( digitalRead(changeSetting) ==LOW ) { stepoffRTChourfwd =0; }}//##################################################################################// set RTC hour backward 1 hour per press ##################################################################################void setRTCbwd(){ if( digitalRead(changeSetting) ==HIGH &&stepoffRTChourbwd ==0 ) { byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year); hour =hour-1; setDS3231time(second, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC stepoffRTChourbwd =1; } if( digitalRead(changeSetting) ==LOW ) { stepoffRTChourbwd =0; }}//##################################################################################// set Minutes Motor forward 1 min per press ##################################################################################void setMinsfwd(){ //digitalWrite(sleep1, LOW); //stepper.enableOutputs();// step minutes 1 min per press if( digitalRead(changeSetting) ==HIGH &&stepoffMin ==0 ) { //Serial.println("Step Forward Man");// serial removed stepoffMin =1; stepminsFwd(); } if( digitalRead(changeSetting) ==LOW ) { stepoffMin =0; }//digitalWrite(sleep1, HIGH); //stepper.disableOutputs();}//##################################################################################// set Minutes Motor backward 1 min per press ##################################################################################void setMinsbwd(){ //digitalWrite(sleep1, LOW); // stepper.enableOutputs(); if( digitalRead(changeSetting) ==HIGH &&stepoffMinbwd ==0 ) { // Serial.println("Step Backward Man");// serial removed stepoffMinbwd =1; stepminsBwd(); } if( digitalRead(changeSetting) ==LOW ) { stepoffMinbwd =0; }//digitalWrite(sleep1, HIGH); // stepper.disableOutputs();}//##################################################################################// step minutes slow forward const press ##################################################################################void setMinsslowfwd(){ stepper.enableOutputs(); digitalWrite(sleep1, LOW); if( digitalRead(changeSetting) ==HIGH ) { // Serial.println("Step Baro Inch Forward Man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 4096 steps (1 revolution):while (stepper.currentPosition() !=1) { //was 52 52x60 =3120 stepper.setSpeed(50); stepper.runSpeed(); } /* digitalWrite(motorPin1, LOW); digitalWrite(motorPin2, LOW); digitalWrite(motorPin3, LOW); digitalWrite(motorPin4, LOW);*/ } digitalWrite(sleep1, HIGH); stepper.disableOutputs();}//##################################################################################// step minutes slow backward const press ##################################################################################void setMinsslowbkd(){ stepper.enableOutputs(); digitalWrite(sleep1, LOW); if( digitalRead(changeSetting) ==HIGH ) { // Serial.println("Step Baro Inch Backward Man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 4096 steps (1 revolution):while (stepper.currentPosition() !=-1) { //was 52 52x60 =3120 stepper.setSpeed(-50); stepper.runSpeed(); } /* digitalWrite(motorPin1, LOW); digitalWrite(motorPin2, LOW); digitalWrite(motorPin3, LOW); digitalWrite(motorPin4, LOW);*/ } digitalWrite(sleep1, HIGH); stepper.disableOutputs();}//##################################################################################// set Hour Motor forward 1 hour per press ##################################################################################void setHoursfwd(){ // stepper2.enableOutputs(); // digitalWrite(sleep2, LOW); // step hours 1 hour per press if( digitalRead(changeSetting) ==HIGH &&stepoffHour ==0 ) { // Serial.println("Step 6hr Forward Man");// serial removed stepoffHour =1; stephourmanFwd(); } // stepper2.disableOutputs(); // digitalWrite(sleep2, HIGH);if( digitalRead(changeSetting) ==LOW ) { stepoffHour =0; }...This file has been truncated, please download it to see its full contents.
BarometerA4988_3hour__21.inoArduino
File for 3 hour display and forecasting/* Example sketch to control a 28BYJ-48 stepper motor with ULN2003 driver board, AccelStepper and Arduino UNO:number of steps/revolutions. More info:https://www.makerguides.com v4 added presure extreme LEDsv5 add forcast LEDs and calcv6 sorted enable and sleep orderv7 remove adjust on and test replace it with Clearing and threatening LEDs PIN 12 and 13 v8 add dac driver-deletedv9 added LCDv10 added weather forecast usingLEDs v12 LEds test addedv13 add 1 dp point to 3 hour displayv14 void 1026 add slow set buttonsv18 voided v19last reading not included in number of stepsv20 change led test orderv20a serial.print removed indicated by // serial removedv21 as 20a identical to v20 that includes serial print*/#include//SFE_BMP180 pressure sensor#include #include // ######## You will need to create an SFE_BMP180 object, here called "pressure":SFE_BMP180 pressure;#define ALTITUDE 125.0 // Altitude of Kenley Surrey in meters//#########//**********************// set the LCD address to 0x27 for a 20 chars 4 line display// Set the pins on the I2C chip used for LCD connections:// addr, en,r w,rs,d4,d5,d6,d7,bl,blpolLiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // Set the LCD I2C address//#define DS3231_I2C_ADDRESS 0x68// Convert normal decimal numbers to binary coded decimalbyte decToBcd(byte val){ return( (val/10*16) + (val%10) );}// Convert binary coded decimal to normal decimal numbersbyte bcdToDec(byte val){ return( (val/16*10) + (val%16) );}// Include the AccelStepper library:#include // Define stepper motor connections and motor interface type. Motor interface type must be set to 1 when using a driver:#define dirPin 11#define stepPin 10#define motorInterfaceType 1// Create a new instance of the AccelStepper class:AccelStepper stepper =AccelStepper(motorInterfaceType, stepPin, dirPin);float seaPressure =0;float pressureNow =0;float pressurePrevious =0;float pressureDiff =0;int checkStop =0;//int pressureRndDiff =0;int pressureRndNow =0;int pressureRndPrevious =0;int adjustOn =12; // allows adjustment of barometer// int test =0; // test mode 0 off 1 is onchar status; double T,P,a;//int h =0;//int m =0;//int j =0;int stepcount =0;//int time =0;//int resetmins =1;//int secondNow =0;//int secondPrevious=0;//int minuteNow =0;//int minutePrevious=0;//int hourNow =0;//int hourPrevious=0;int initial =0;int initial1 =0;int initial3 =0;//int sync30 =3;//30sec sync on pin18//int syncLED =15;//int manSync =12;//int adjustOn =12;//int syncStop =0;//int sync30Stop =0;int stepoffHour =0;int stepoffHourbkw =0;int stepoffMin =0;int stepoffMinbwd =0;//int stepoffRTCminfwd =0;//int stepoffRTCminbwd =0;//int stepoffRTChourfwd =0;//int stepoffRTChourbwd =0;//int settingreadPin =A3; //Pin for sensing analogue value from pot//int settingVal =0; // Analogue value 0-1023int LCDstop =0; // stops settings on LCD display refreshing until they changeint hourPulse =3; //hour pulse from main Barometer Arduinoint adjustLock =0; // turns off adjust lockint hourcalc =0;float hourDiff =0.50; // used to check if 3hour previous motor should be stepped.float hourChange =0.00; // the amount of 3 hour to step float valueint hourStep =0; //the amount of 3 hour to stepint hourStepdigit1 =0; // gets the 1st digit from hourstepint hourStepdigit2 =0; // gets the 2nd digit from hourstepint stepTotal =0; // tptal amount of steps for 3 hour motorint hourChangeNeg =0;// if hour change is -ve this stores the value to chenge stepTotal laterfloat currentDisplay =0.50; //current 3hour change readingfloat hour0 =1036.00; // you can set last 3 hours pressure here or leave at 0 and thefloat hour1 =1036.00; // readings will catch up over the next 4 hoursfloat hour2 =1036.00;float hour3 =1036.00;float hour4 =1036.00;//check readings https://www.meteoplug.com/cgi-bin/meteochart.cgi?draw=a3aeaaa1acbdf9f1fcfed4fedbc2c094c0d6d6d1d2c5edcebbfee9ffeff1fbf9int sleep =9;int hourPulseOff =0;//int testinput =17;int testpulse =0;int hourPlus1min =0;int stepFwd1 =14;int manstepFwd1 =0;int maninchFwdBwd =A7;int stepBwd1 =15;int manstepBwd1 =0;int hour3LowLED =5;// Green low range LEDint hour3HighLED =4;//Red high range LEDint ledStormy =8;int ledRain =7;int ledChange =6;int ledFair =2;int ledDry =13;int ledClear =12;int ledThreat =17;int ledNoChange =16;//Testint n =0;int n1 =0;int n2 =0;void setup() { pinMode(ledStormy, OUTPUT); pinMode(ledRain, OUTPUT); pinMode(ledChange, OUTPUT); pinMode(ledFair, OUTPUT); pinMode(ledDry, OUTPUT); pinMode(ledClear, OUTPUT); pinMode(ledThreat, OUTPUT); pinMode(ledNoChange, OUTPUT); pinMode(stepFwd1, INPUT); pinMode(stepBwd1, INPUT); // pinMode(adjustOn, INPUT); pinMode(hourPulse, INPUT); pinMode(hour3LowLED, OUTPUT); pinMode(hour3HighLED, OUTPUT); pinMode(sleep, OUTPUT); // pinMode(settingreadPin, INPUT); // Set the maximum steps per second:stepper.setMaxSpeed(1000); lcd.begin(20,4); // initialize the lcd for 20 chars 4 lines, turn on backlight lcd.backlight(); // backlight on not needed as controlled by 7 MAX2719 lcd.setCursor(0,0); //Start at character 0 on line 0 lcd.print("Barometer A988 3 Hr"); //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ lcd.setCursor(0,1); //Start at character 0 on line 0 lcd.print(" Version 20"); //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ { // Wire.begin(); Serial.begin (9600); delay(2000);lcd.setCursor(0,2); //Start at character 0 on line 0 lcd.print("##### LED TEST #####"); //@@@@@@@@}//#############################################################Serial.println("REBOOT v08");//############################################################ // Initialize the sensor (it is important to get calibration values stored on the device). if (pressure.begin()) Serial.println("BMP180 init success"); else { // Oops, something went wrong, this is usually a connection problem, // see the comments at the top of this sketch for the proper connections. Serial.println("BMP180 init fail\n\n"); while(1); // Pause forever. }// test =1; // test set to 0 off 1 on//LED Testdelay (2000);digitalWrite(ledThreat, HIGH);delay (500);digitalWrite(ledThreat, LOW);digitalWrite(ledNoChange, HIGH);delay (500);digitalWrite(ledNoChange, LOW);digitalWrite(ledClear, HIGH);delay (500);digitalWrite(ledClear, LOW);digitalWrite(ledStormy, HIGH);delay (500);digitalWrite(ledStormy, LOW);digitalWrite(ledRain, HIGH);delay (500);digitalWrite(ledRain, LOW);digitalWrite(ledChange, HIGH);delay (500);digitalWrite(ledChange, LOW);digitalWrite(ledFair, HIGH);delay (500);digitalWrite(ledFair, LOW);digitalWrite(ledDry, HIGH);delay (500);digitalWrite(ledDry, LOW);digitalWrite(hour3HighLED, HIGH);delay (500);digitalWrite(hour3HighLED, LOW);digitalWrite(hour3LowLED, HIGH);delay (500);digitalWrite(hour3LowLED, LOW); lcd.clear (); getPressure ();// gets all pressure readings showLCD(); // load display to LCD getForecast(); //get forcast and set LEDs for weather //disable motors on startupdigitalWrite(sleep, HIGH);stepper.disableOutputs(); }void loop() { hourPlus1min =(digitalRead(hourPulse));//checks for pulse at 1min past the hour from the barometer if (hourPlus1min ==HIGH &&hourPulseOff ==0 || initial1 ) { initial1 =0; hourcalc++; if (hourcalc> 4) { hourcalc =0; } //Serial.print("hourcalc ");// serial removed // Serial.println(hourcalc);// serial removed getPressure ();// gets all pressure readings getForecast(); //get forcast and set LEDs for weather showLCD(); // load display to LCD hourPulseOff =1; //turns off } else if (hourPlus1min ==LOW) { hourPulseOff =0; } adjustLock =0; //hold on adjustment// Step forward/back man~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ // step hours 1 hour per press manstepFwd1 =digitalRead(stepFwd1); if( manstepFwd1 ==HIGH &&stepoffHour ==0 ) { stepoffHour =1; stephourmanFwd(); } manstepFwd1 =digitalRead(stepFwd1);if( manstepFwd1 ==LOW ) { stepoffHour =0; } // step hours 1 hour per press manstepBwd1 =digitalRead(stepBwd1); if( manstepBwd1 ==HIGH &&stepoffHour ==0 ) { stepoffHour =1; stephourmanBwd(); } manstepBwd1 =digitalRead(stepBwd1); if( manstepBwd1 ==LOW) { stepoffHour =0; } //~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ //Inch 3hr forward/backwardsmaninchFwdBwd=analogRead(A7);if (maninchFwdBwd>800 ){// Serial.print(" maninchFwdBwd=");// serial removed // Serial.println(maninchFwdBwd);// serial removed maninchFwd(); } else if (maninchFwdBwd <200) { // Serial.print(" maninchFwdBwd=");// serial removed// Serial.println(maninchFwdBwd);// serial removed maninchBwd(); } //##############################################################################//step 3 hour motorif (hourChange> 0 &&hourChange <20) // 3 hour motor will not step if diff> 40 { stephourFwd(); // Serial.print("Step 3 hour Forward ");// serial removed // Serial.println(hourChange);// serial removed hourChange =0; } else if(hourChange <0 &&hourChange> -20) { stephourBwd(); // Serial.print("Step 3 Hour Backward ");// serial removed // Serial.println(hourChange);// serial removed hourChange =0; } //############################################################################## } //##################################################################################// set Hour Motor backward 1 hour per press ##################################################################################void setHoursbwd(){ // digitalWrite(sleep, LOW);// stepper.enableOutputs(); // step hours 1 hour per press if( digitalRead(adjustOn) ==HIGH &&stepoffHourbkw ==0 ) { // Serial.println("Step 3hr Backward Man"); stepoffHourbkw =1; stephourmanBwd(); }// stepper.disableOutputs();// digitalWrite(sleep, HIGH);if( digitalRead(adjustOn) ==LOW ) { stepoffHourbkw =0; }// End step hours 1 hour per press}//##################################################################################// step hours slow forward const press ##################################################################################void maninchFwd(){ stepper.enableOutputs(); digitalWrite(sleep, LOW); if( digitalRead(adjustOn) ==HIGH ) { // Serial.println("Step 3hr Inch Forward Man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 8 steps (1 revolution):while (stepper.currentPosition() !=1) { //was 52 52x60 =3120 stepper.setSpeed(10); stepper.runSpeed(); } } digitalWrite(sleep, HIGH);stepper.disableOutputs();}//##################################################################################// step hours slow backward const press ##################################################################################void maninchBwd(){ stepper.enableOutputs(); digitalWrite(sleep, LOW); if( digitalRead(adjustOn) ==HIGH ) { // Serial.println("Step 3hr Inch backward Man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 8 steps (1 revolution):while (stepper.currentPosition() !=-1) { //was 52 52x60 =3120 stepper.setSpeed(-10); stepper.runSpeed(); } } digitalWrite(sleep, HIGH);stepper.disableOutputs();}//################################################################################## //Hour Motor #####################################################################################################void stephourFwd() // steps hour hand forward 1 hour{ stepper.enableOutputs(); // Serial.println("Step 3 hrs forward auto");// serial removed digitalWrite(sleep, LOW); stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 4096 steps (1 revolution):while (stepper.currentPosition() !=hourChange*160) { //hourDiff gives the nuber of steps to take stepper.setSpeed(400); stepper.runSpeed(); } digitalWrite(sleep, HIGH); stepper.disableOutputs(); }//###############################################################################################################//Hour Motor #####################################################################################################void stephourBwd() // steps hour hand backward 1 hour{ stepper.enableOutputs(); //Serial.println("Step 3hrs backward auto");// serial removed digitalWrite(sleep, LOW); stepper.setCurrentPosition(0);while ( stepper.currentPosition() !=hourChange*160) { stepper.setSpeed(-400); stepper.runSpeed(); }digitalWrite(sleep, HIGH); stepper.disableOutputs(); }//###############################################################################################################//Hour Motor Man Step forward#####################################################################################################void stephourmanFwd() // steps hour hand forward 1 hour{ stepper.enableOutputs(); digitalWrite(sleep, LOW); //Serial.println("Step 3hr forward man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 4096 steps (1 revolution):while ( stepper.currentPosition() !=160) { stepper.setSpeed(400); stepper.runSpeed(); } digitalWrite(sleep, HIGH); stepper.disableOutputs(); }//###############################################################################################################//Hour Motor Man Step back ward #####################################################################################################void stephourmanBwd() // steps hour hand backward 1 hour{ stepper.enableOutputs(); digitalWrite(sleep, LOW); // Serial.println("Step 3hr backward man");// serial removed stepper.setCurrentPosition(0);while ( stepper.currentPosition() !=-160) { stepper.setSpeed(-400); stepper.runSpeed(); }digitalWrite(sleep, HIGH); stepper.disableOutputs(); }//###############################################################################################################void getPressure ()//get all pressure readings checked every 10 mins eg 0 10 20 etc{ if (checkStop ==0){ // If you want sea-level-compensated pressure, as used in weather reports, // you will need to know the altitude at which your measurements are taken. // We're using a constant called ALTITUDE in this sketch:// Serial.println(); // Serial.print("provided altitude:"); // Serial.print(ALTITUDE,0);// Serial.print(" meters, "); // Serial.print(ALTITUDE*3.28084,0);// Serial.println(" feet"); // If you want to measure altitude, and not pressure, you will instead need // to provide a known baseline pressure. This is shown at the end of the sketch. // You must first get a temperature measurement to perform a pressure reading. // Start a temperature measurement:// If request is successful, the number of ms to wait is returned. // If request is unsuccessful, 0 is returned. status =pressure.startTemperature(); if (status !=0) { // Wait for the measurement to complete:delay(status); // Retrieve the completed temperature measurement:// Note that the measurement is stored in the variable T. // Function returns 1 if successful, 0 if failure. status =pressure.getTemperature(T); if (status !=0) { // Print out the measurement:// Serial.print("temperature:"); // Serial.print(T,2); // Serial.print(" deg C, "); // Serial.print((9.0/5.0)*T+32.0,2); // Serial.println(" deg F"); // Start a pressure measurement:// The parameter is the oversampling setting, from 0 to 3 (highest res, longest wait). // If request is successful, the number of ms to wait is returned. // If request is unsuccessful, 0 is returned. status =pressure.startPressure(3); if (status !=0) { // Wait for the measurement to complete:delay(status); // Retrieve the completed pressure measurement:// Note that the measurement is stored in the variable P. // Note also that the function requires the previous temperature measurement (T). // (If temperature is stable, you can do one temperature measurement for a number of pressure measurements.) // Function returns 1 if successful, 0 if failure. status =pressure.getPressure(P,T); if (status !=0) { // Print out the measurement:// Serial.print("absolute pressure:"); // Serial.print(P,2); // Serial.print(" mb, "); // Serial.print(P*0.0295333727,2); // Serial.println(" inHg"); // The pressure sensor returns abolute pressure, which varies with altitude. // To remove the effects of altitude, use the sealevel function and your current altitude. // This number is commonly used in weather reports. // Parameters:P =absolute pressure in mb, ALTITUDE =current altitude in m. // Result:p0 =sea-level compensated pressure in mb seaPressure =pressure.sealevel(P,ALTITUDE); // we're at 160 meters (Kenley, Surrey UK) // serial removed /* Serial.print("relative (sea-level) pressure:"); Serial.print(seaPressure,2); Serial.print(" mb, "); Serial.print(seaPressure*0.0295333727,2); Serial.println(" inHg"); */ // On the other hand, if you want to determine your altitude from the pressure reading, // use the altitude function along with a baseline pressure (sea-level or other). // Parameters:P =absolute pressure in mb, p0 =baseline pressure in mb. // Result:a =altitude in m. a =pressure.altitude(P,seaPressure); // Serial.print("computed altitude:"); // Serial.print(a,0); // Serial.print(" meters, "); // Serial.print(a*3.28084,0); // Serial.println(" feet"); } else Serial.println("error retrieving pressure measurement\n"); } else Serial.println("error starting pressure measurement\n"); } else Serial.println("error retrieving temperature measurement\n"); } else Serial.println("error starting temperature measurement\n");}//Serial.print("hourscalc "); // Serial.println(hourcalc);if (hourcalc ==0){ hour0 =seaPressure;//was rnd sea pressure currentDisplay =hourDiff; // the last display reading becomes the old reading called currentDisplay hourDiff =hour0 - hour3; // this is the air pressure difference from now to the reading 3 hours ago and wil be displayed onthe 3 hour dial calcCurrentDisp (); // calculates 3 hour Air pressure display }else if (hourcalc ==1){ hour1 =seaPressure; currentDisplay =hourDiff; hourDiff =hour1 - hour4; calcCurrentDisp (); }else if (hourcalc ==2 ){ hour2 =seaPressure; currentDisplay =hourDiff;hourDiff =hour2 - hour0; calcCurrentDisp (); }else if (hourcalc ==3 ){ hour3 =seaPressure; currentDisplay =hourDiff; hourDiff =hour3 - hour1; calcCurrentDisp (); }else if (hourcalc ==4 ){ hour4 =seaPressure; currentDisplay =hourDiff; hourDiff =hour4 - hour2; calcCurrentDisp (); }//show 3 hour pressure scale hi/low LEDsif(hourDiff> 9 || hourDiff <-9) // if 3 hour pressure is outside of extended range both hi and low range leds light{digitalWrite( hour3HighLED, HIGH); digitalWrite( hour3LowLED, HIGH);}else if(hourDiff>=4.80) { digitalWrite( hour3HighLED, HIGH); digitalWrite( hour3LowLED, LOW); } else if (hourDiff <=-4.80) { digitalWrite( hour3LowLED, HIGH); digitalWrite( hour3HighLED, LOW); } else if ( hourDiff <4.80 &&hourDiff>-4.80 ) { digitalWrite( hour3LowLED, LOW); digitalWrite( hour3HighLED, LOW); } // Serial.print("currentDisplay (old) ");// serial removed // Serial.println(currentDisplay);// serial removed// Serial.print("3 hour display to show ");// serial removed// Serial.println(hourDiff);// serial removed//Serial.print("RND seaPressure ");//Serial.println(round(seaPressure));//get pressure change and show change over 1 hour on LCD bottom row pressureNow =seaPressure; if ( pressureNow !=pressurePrevious || initial ) { initial =0; pressureDiff =pressureNow - pressurePrevious; //Print pressure and diff on LCD lcd.setCursor(0,3); if (pressurePrevious ==0.00) { pressurePrevious =pressureNow;// shows previous pressure at startup } if(pressurePrevious<1000) { lcd.print(0); } lcd.print(pressurePrevious);// shows previous pressure until 1hPa change lcd.print("hPa "); // pressurePrevious =pressureNow; lcd.setCursor(12,3); lcd.print(" ");//blank section lcd.setCursor(12,3); lcd.print(pressureDiff); // show rounded pressure reading on display updayes every hour lcd.setCursor(0,2); lcd.print (""); // show rounded pressure on lcd lcd.setCursor(0,2); if(pressureNow<1000) { lcd.print(0); } lcd.print(round(pressureNow)); } pressureRndPrevious =pressureRndNow; pressurePrevious =pressureNow;//resets pressure change//################################################################################# } //####################################################################// show forecast on LEDs/* Predicting the Weather With the BarometerMore specifically, a barometer with readings in hPa can be interpreted in this manner:If the reading is over 1022 hPa Rising or steady pressure means continued fair weather.Slowly falling pressure means fair weather.Rapidly falling pressure means cloudy and warmer conditions.If it falls between 1009–1022 hPa Rising or steady pressure means present conditions will continue.Slowly falling pressure means little change in the weather.Rapidly falling pressure means that rain is likely, or snow if it is cold enough.If the reading is under (1009 hPaRising or steady pressure indicates clearing and cooler weather.Slowly falling pressure indicates rainRapidly falling pressure indicates a storm is coming.Rising or Fallin g slowlyPressure change of 0.1 to 1 mb in the preceding three hoursRising or FallingPressure change of 1 to 3 mb in the preceding three hoursRising or Falling quicklyPressure change of 3 to 6 mb in the preceding three hoursRising or Falling very rapidlyPressure change of more than 6.0 mb in the preceding three hours */void getForecast(){ //reading is under (1009 hPa //Rising or steady pressure indicates clearing and cooler weather if(seaPressure <1009.00 &&hourDiff>=0 ) { ClearforecastLED();// clear all forecast LEDs before changing digitalWrite( ledChange, HIGH); digitalWrite( ledClear, HIGH); lcd.setCursor(8,2); lcd.print (""); lcd.setCursor(8,2); lcd.print("Chg Clearing"); } //reading is under (1009 hPa //Slowly falling pressure indicates rain else if(seaPressure <1009.00 &&hourDiff <0 &&hourDiff>=-1.5 ) { ClearforecastLED(); digitalWrite( ledRain, HIGH); digitalWrite( ledThreat, HIGH); lcd.setCursor(8,2); lcd.print(" "); lcd.setCursor(8,2); lcd.print("Rain Threat"); } //reading is under (1009 hPa //Rapidly falling pressure indicates a storm is coming. else if(seaPressure <1009.00 &&hourDiff <-1.5 ) { ClearforecastLED(); digitalWrite( ledStormy, HIGH); digitalWrite( ledThreat, HIGH); lcd.setCursor(8,2); lcd.print(" "); lcd.setCursor(8,2); lcd.print("Storm Threat"); } //1009–1022 hPa //Rising or steady pressure means present conditions will continue. //Slowly falling pressure means little change in the weather. else if(seaPressure>=1009.00 &&seaPressure <=1022.00 &&hourDiff>=-1.5 &&hourDiff <=1.5 ) { ClearforecastLED(); digitalWrite( ledNoChange, HIGH); digitalWrite( ledFair, HIGH); lcd.setCursor(8,2); lcd.print(" "); lcd.setCursor(8 ,2); lcd.print("Fair No Chge"); }//1009–1022 hPa //Rising rapidly //Clearing else if(seaPressure>=1009.00 &&seaPressure <=1022.00 &&hourDiff>1.5 )...This file has been truncated, please download it to see its full contents.
Esquemas
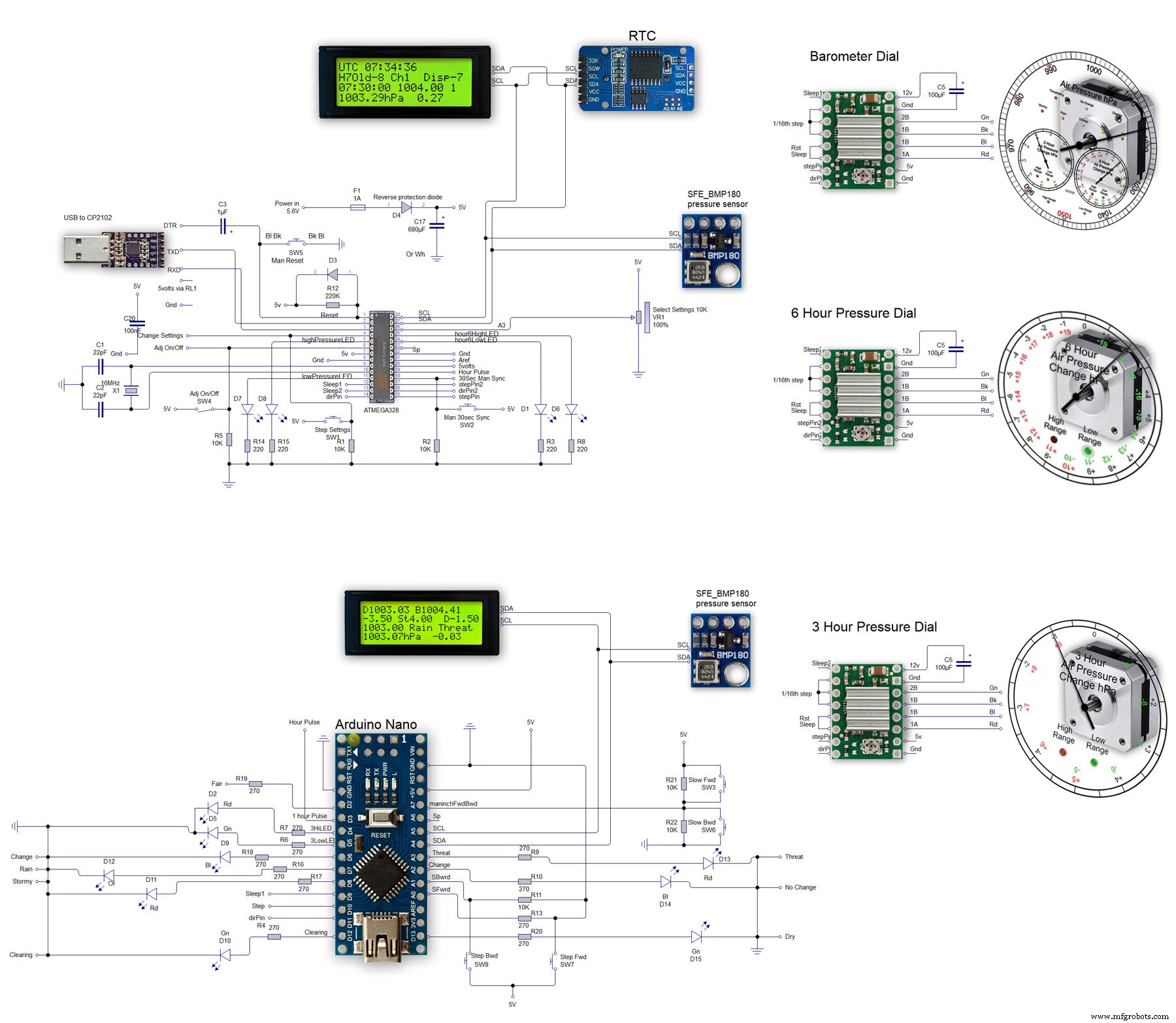
Processo de manufatura