


Catapulta automática para arremessar comida para animais de estimação, bolas e muito mais!
Componentes e suprimentos
 |
| × | 1 | |||
| × | 3 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 10 | |||
 |
| × | 2 | |||
 |
| × | 1 |
Aplicativos e serviços online
 |
|
Sobre este projeto
Olá e seja bem vindo ao meu primeiro projeto!
Nosso cachorro ADORA sua comida, ela vai literalmente comer tudo em segundos. Tenho pensado em maneiras de diminuir isso, desde bolas com a comida dentro até jogá-la no quintal. Surpreendentemente, ela agora é como um vácuo e pode encontrar e comer a comida com uma rapidez impressionante. Então, de volta à prancheta e eu vim com este dispositivo para ajudá-la a desacelerar e desfrutar de sua comida :)
CONCEITO

Por favor, dedique alguns segundos para curtir os 2 vídeos, eles explicam muito.
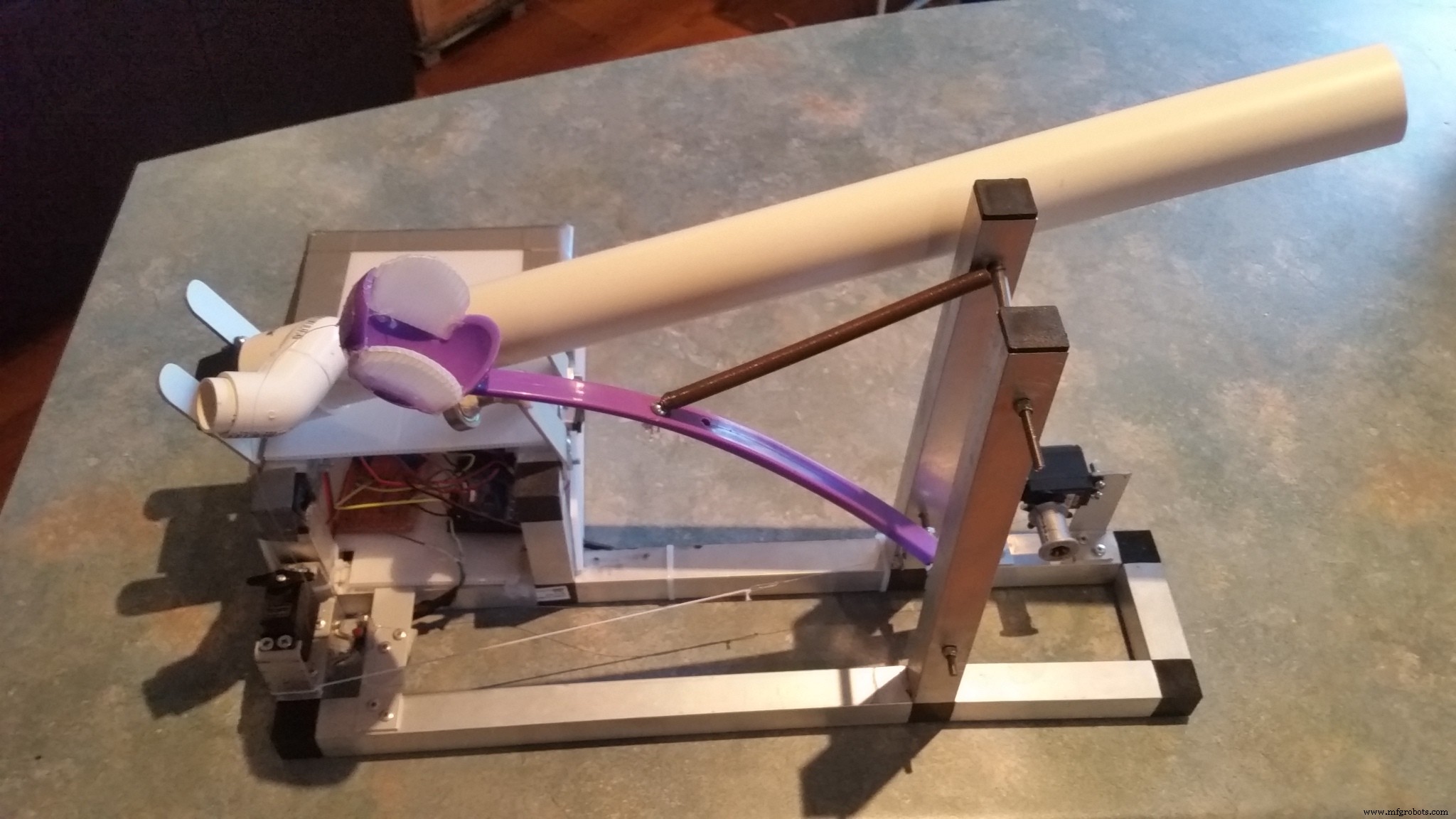
Mas, em palavras, o conceito básico é que o servo Rotator gira e puxa para baixo o braço da catapulta. Ele faz isso até tocar o interruptor de limite. Em seguida, o servo Trigger vai para a posição de espera, que segura o braço da catapulta. O servo Rotator então retrocede à posição original, pronto para o próximo lançamento.
O servo de entrega de alimentos gira o tubo e fornece um pouco de comida (ou outras coisas) para o recipiente / cabeça do braço da catapulta. O servo Trigger então gira e deixa a mola puxar para trás o braço da catapulta e arremessar a comida.
Em testes, essa configuração e catapultou biscoitos de ração para cães com mais de 10 metros, com a comida rolando. Ajustes nos servos e mudanças na mola irão modificar isso completamente.
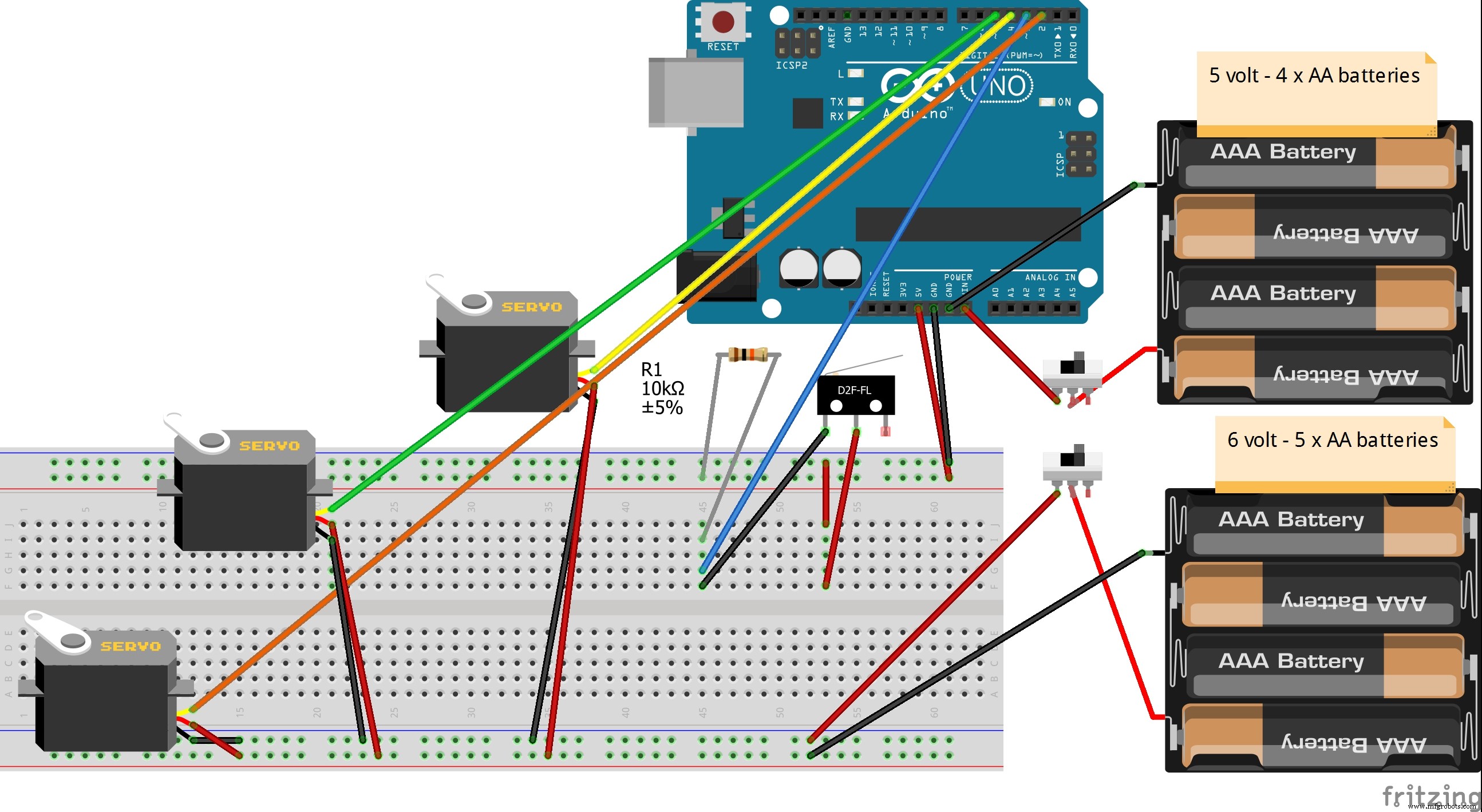
ELETRÔNICA
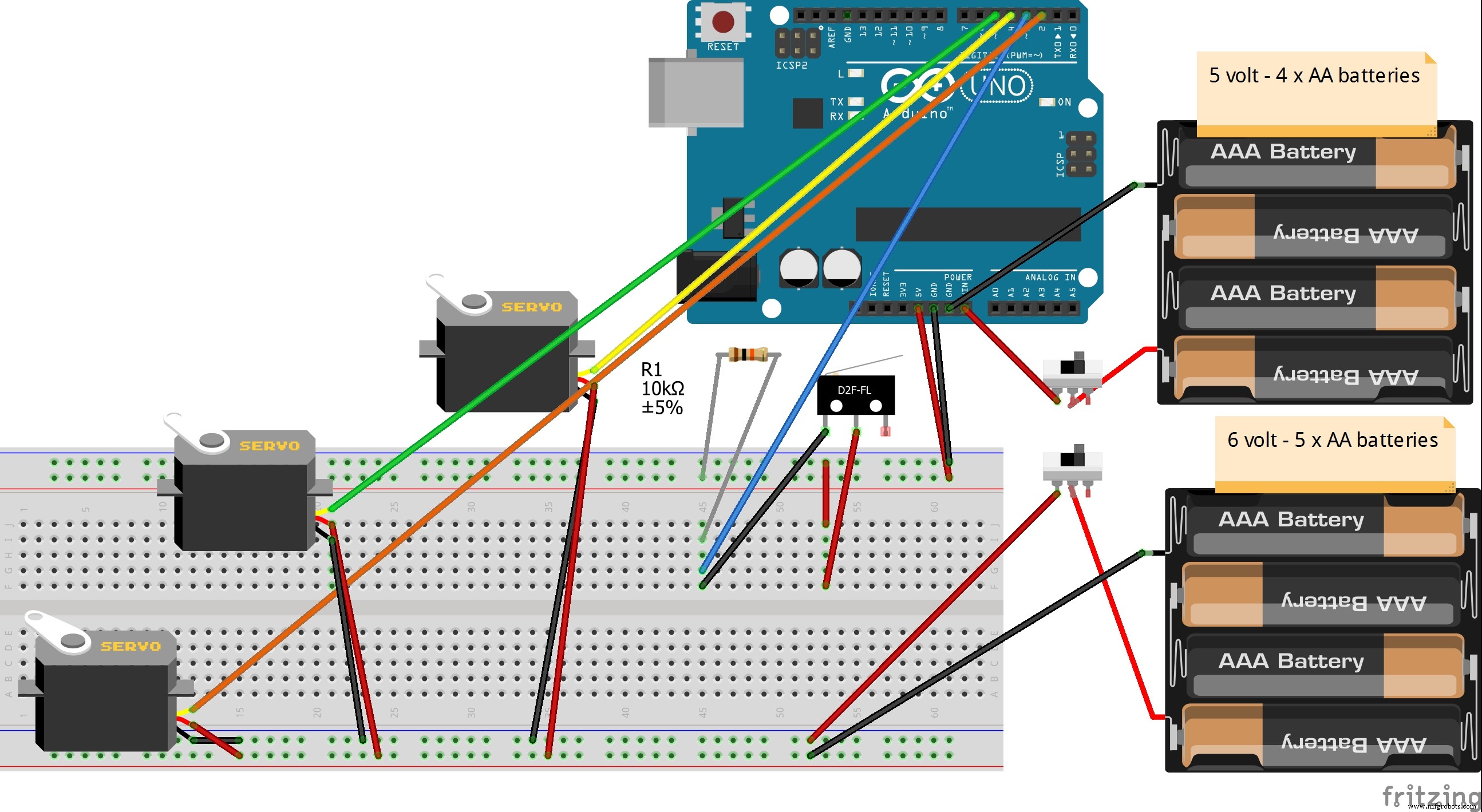
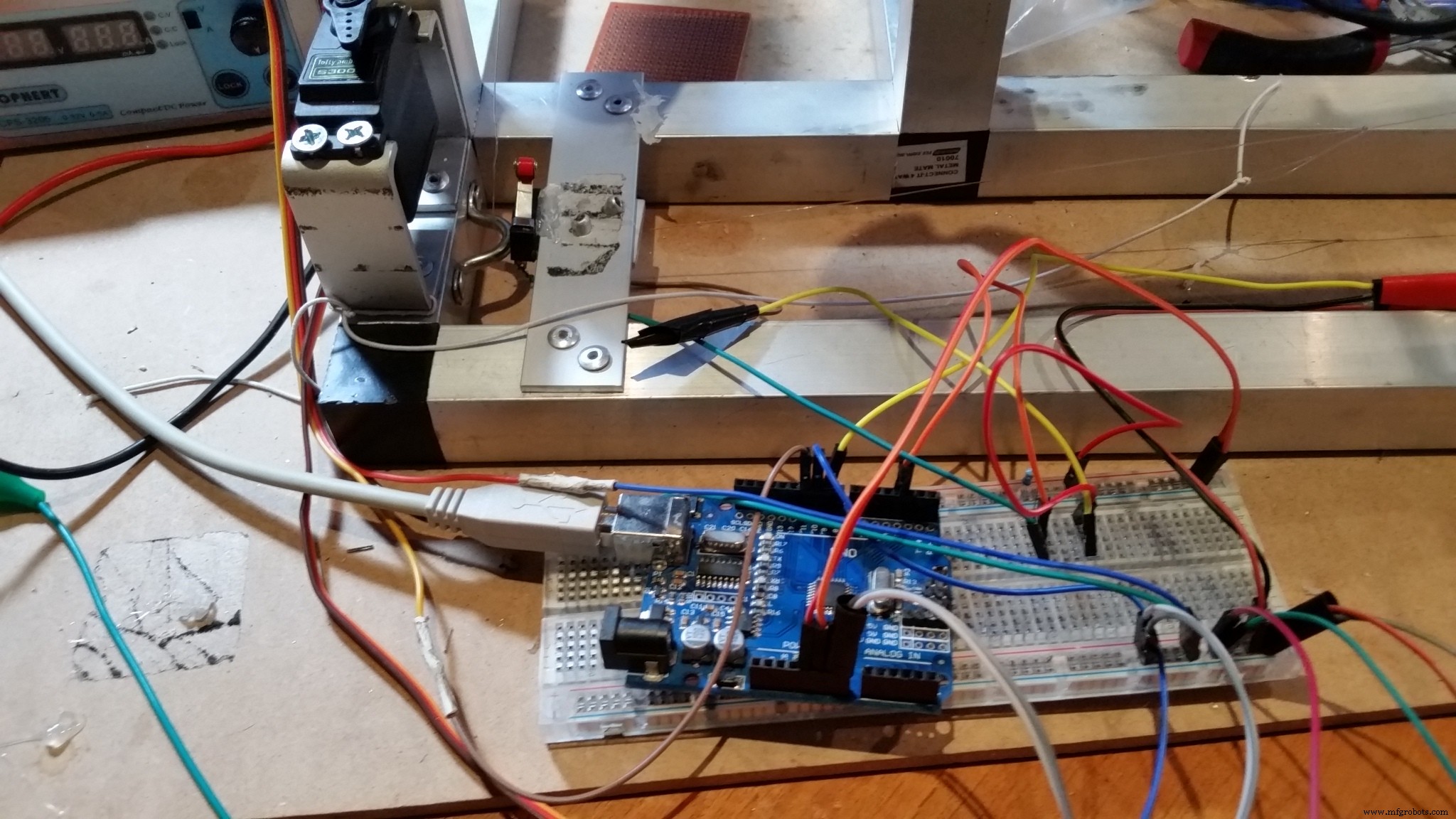
Tentarei ser sucinto ao longo deste projeto, não apenas pela simplicidade, mas porque essa catapulta pode ser feita de 100 maneiras diferentes. Ele pode ser escalado e você pode fazer várias estruturas e usar vários materiais. Além da eletrônica e dos servos, o resto é totalmente flexível com o que você tem em mãos, ou com o seu orçamento.
Não vou explicar passo a passo como fazer a eletrônica, há muitos projetos impressionantes nisso. Especialmente porque sou um novato, provavelmente cometi erros e seria melhor você aprender com os profissionais;)
MATERIAIS
- Arduino Uno R3 - qualquer Arduino fará o trabalho embora
- 2 x 180 graus servos
- 1 x servo de rotação contínua
- Interruptor de limite
- resistor de 10k ohm
- 4 pilhas AA e estojo
- 1 bateria de lanterna de 6 volts - pode ser (e eu irei) substituída por 5 baterias AA conectadas entre si
- 2 interruptores - qualquer tipo serve, mesmo os mais simples
- Cabos de conexão - muitos deles;)
- Breadboard - para teste
MATERIAIS - SE CRIAR PERMANENTE
Conectores de 2 x 2 pinos da placa Perf - opcional, você pode conectar os invólucros da bateria.
SERVOS
Comprei alguns servos baratos Lofty Ambition S3003 180 graus no eBay. Você vai querer algo com pelo menos este grunhido, não tente comprar menos, pois eles não conseguirão levar a carga. Mas eles não precisam ser caros da Jaycar (loja de eletrônicos australiana) ou similares. O servo de rotação contínua que usei é FS5106R. O modelo não é importante, mas você definitivamente precisará que o servo tenha pelo menos essas especificações.
Se você tornar a catapulta mais forte ou maior, certifique-se de obter servos maiores para corresponder.
ESTRUTURA

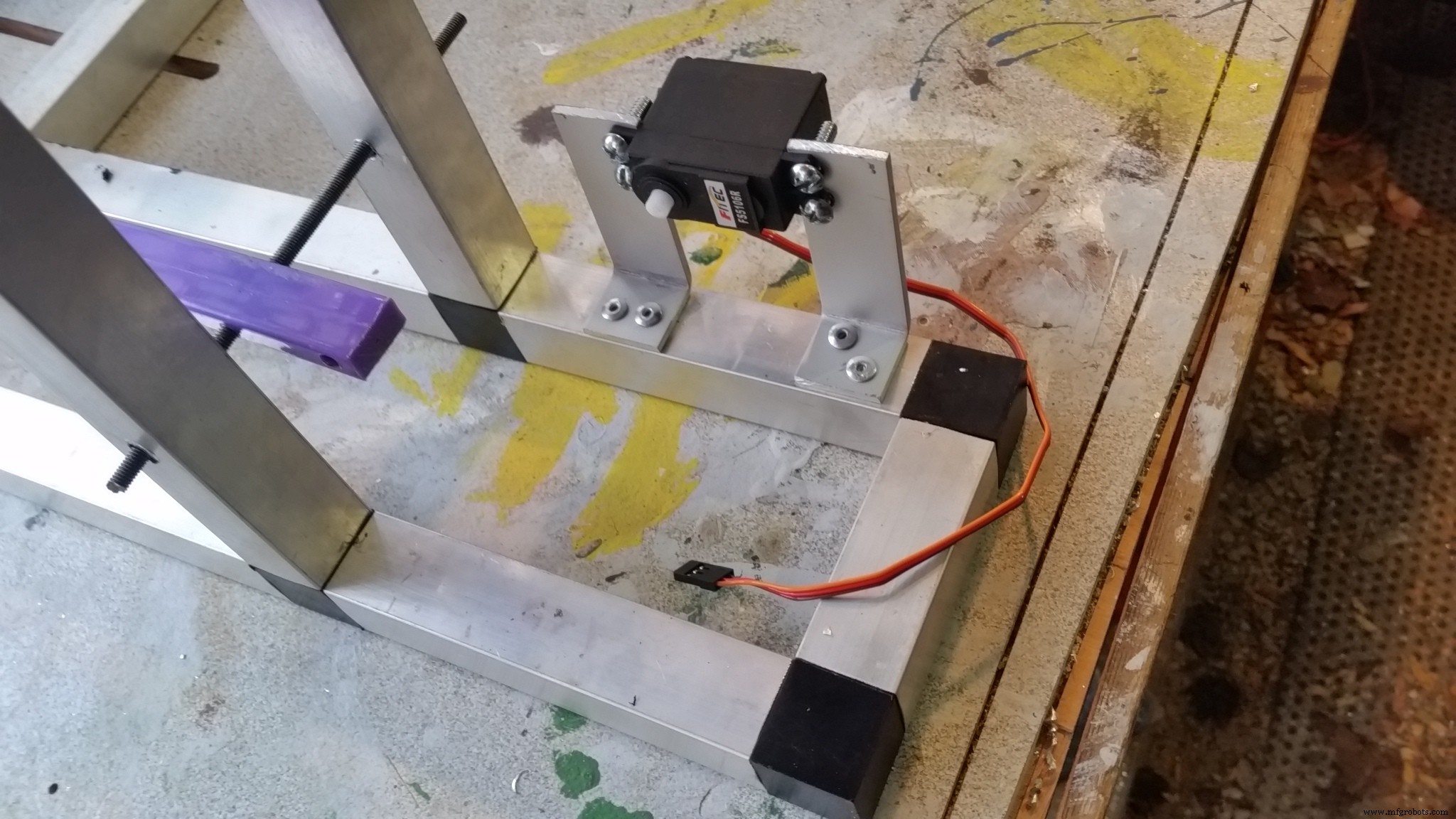


Como afirmado anteriormente, a estrutura depende inteiramente de você. Você pode fazer de plástico, madeira ou metal. O tamanho também depende de você. Se você quiser catapultar mais comida (ou outras coisas), torne-a menor ou maior. Portanto, devido a esses pontos, não vou entrar em detalhes sobre como fiz minha estrutura. Estou muito feliz em fornecer respostas sobre qualquer coisa.
Sou um GRANDE fã de reutilizar / reciclar / upcycle / etc. Muito do que usei tinha em meu galpão. Eu fiz a maior parte da minha estrutura de alumínio que tinha devido a outro projeto. A estrutura principal é feita de um tubo de alumínio quadrado de 25 mm e conectores de plástico "conecte-o". Os suportes para os motores são feitos de alumínio de 25 mm de largura x 3 mm.
O conceito de entrega de comida veio deste projeto:
https://www.hackster.io/circuito-io-team/iot-pet-feeder-10a4f3 por https://www.hackster.io/circuito-io-team - um grande obrigado a eles!
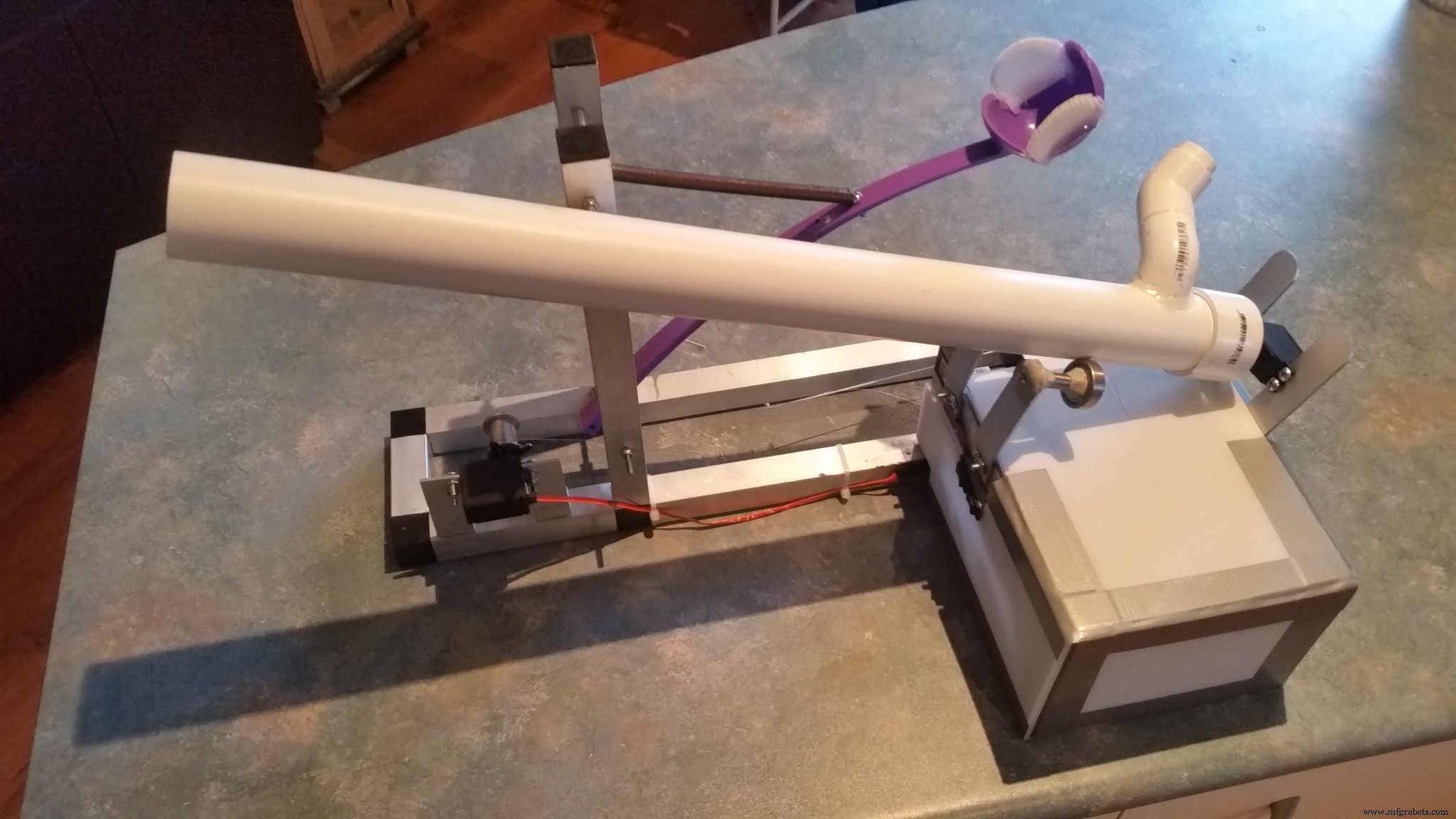
O suporte que fiz é de tubo de PVC de 40 mm da minha loja de ferragens local. O braço real é composto por dois conectores menores de 45 graus, conectados entre si e colados a quente no tubo maior. O tubo de PVC maior tem outro conector de 45 graus para facilitar a adição de biscoitos de ração para animais de estimação (ou outras coisas). Tudo feito para poder ser desmontado, para qualquer modificação.
O resto do braço de entrega de alimentos foi projetado para permitir um movimento circular fácil - para torná-lo mais fácil no servo. Existem maneiras melhores (se você tiver as ferramentas) de fazer isso, mas eu fiz o meu melhor. Fiz alguns suportes, cortei uma haste de metal e usei um produto chamado "amasse" para prender as hastes aos suportes e aos rolamentos. Como você pode ver pelos vídeos, o tubo de PVC gira suavemente sobre os rolamentos e estes tiram grande parte do peso (e do torque necessário) do servo.
O braço da catapulta é um arremessador de bola de tênis de uma loja barata de $ 2.
O poder catapultador vem de uma velha mola que encontrei em minha oficina - como você pode ver pela ferrugem. O tamanho, tipo e força da mola são cruciais para a força e eficácia das funções da catapulta. Você terá que equilibrar a força do servo, a força da mola e a flexibilidade do braço da catapulta. Obter esse equilíbrio é complicado e realmente depende do que você está procurando. Optei por um design que deixa movimento no braço, o que cria alguma imprevisibilidade no destino da comida. O gabinete superior do braço da catapulta, que segura os biscoitos, também auxilia na imprevisibilidade. Mais diversão para o animal encontrar a comida.
O braço da catapulta é puxado para baixo através de linha de pesca através de uma pequena alça de metal (ou alimentador, depende do seu uso), para baixo sob uma plataforma que segura a chave fim de curso (mais sobre isso em segundo), ao longo do comprimento da estrutura, através de outra alça de metal (para evitar que se enrosque), depois presa ao fuso (usei a coisa de plástico que segura o algodão para o fuso no Rotator), que é preso ao servo contínuo. Além disso, usei um pedaço de elástico fino e fraco, preso à linha de pesca e aos suportes Trigger. Isso garante que, quando o Rotator desenrolar, a linha de pesca não fique presa em lugar nenhum.
Eu usei este Tunnel Core - folha de plástico multifuncional - placa de utilitário de parede dupla para uma maneira fácil de criar o invólucro para as baterias e eletrônicos.
A estrutura é muito sólida, mas bastante leve. A parte mais pesada é a bateria da lanterna, que em breve será substituída por baterias recarregáveis AA.
LIÇÕES APRENDIDAS E MODIFICAÇÕES FUTURAS
Como com qualquer coisa em que você não seja um mestre, sempre há coisas que são aprendidas ao longo do caminho. Neste projeto, bem, vamos apenas dizer que você ficaria entediado com a minha lista antes de chegar ao fim;)
Um dos maiores problemas é o entupimento de alimentos. Este braço de entrega de comida veio de um projeto, mas infelizmente não consigo encontrá-lo. Ele esporadicamente não entrega nenhum biscoito, mas isso é uma coisa boa, pois mantém o animal de estimação na dúvida! Mas, geralmente funciona muito bem.
Construí a estrutura de alumínio porque nosso cachorro não é gentil, então precisa segurá-lo. Felizmente, até agora está indo bem.
Estarei melhorando o braço da catapulta, tornando-o um pouco mais sexy. A maioria dos elementos importantes podem ser divididos para permitir o acesso. por exemplo. entrega de comida, gabinete eletrônico.
Ao todo, um projeto muito divertido e nosso cachorro adora! Estou muito feliz em fornecer respostas ou conselhos sobre qualquer coisa.
Muito obrigado ao Hackster e a você por ler sobre a Catapulta Automática.
Código
- Catapulta automática - código Arduino
Catapulta automática - código do Arduino Arduino
/ * * Flinger automático de ração para animais de estimação por Nathan King junho de 2018 * / # includeint FoodDeliveryReleasePosition =115; int FoodDeliveryHoldPosition =0; int TriggerReleasePosition =90; int TriggerHoldPosition =0; int limit_switch =3; int; switch_state =0; Servo fooddelivery; // cria um objeto servo para controlar o gatilho armServo de entrega de comida; // cria um objeto servo para controlar o rotador triggerServo; // cria um objeto servo para controlar o rotatorvoid setup () {rotater.attach (2); // anexa o gatilho do servo rotador.attach (4); // anexa o servo acionador fooddelivery.attach (5); // anexa o servo de entrega de comida pinMode (limit_switch, INPUT); Serial.begin (9600);} void loop () {rotater.write (89); // interrompe o movimento do servo Rotator - desnecessário se você tiver um bom servo;) delay (500); // Posições iniciais fooddelivery.write (FoodDeliveryHoldPosition); atraso (1000); trigger.write (TriggerHoldPosition); atraso (1000); trigger.write (TriggerReleasePosition); delay (1000); // loop do interruptor de limite para parar o servo Rotator switch_state =digitalRead (limit_switch); Serial.println (switch_state); enquanto (switch_state ==HIGH) {switch_state =digitalRead (limit_switch); Serial.println ("Switch está desligado"); rotater.write (75); // inicia o Rotator no sentido horário na velocidade xx (0-255)} Serial.println ("Switch is on"); rotater.write (89); // para o servo Rotator // Segura o braço da catapulta no gatilho e redefine o Rotator para a posição inicial trigger.write (TriggerHoldPosition); atraso (1000); rotater.write (110); atraso (4500); rotater.write (89); atraso (2000); // Entrega de comida para catapulta fooddelivery.write (FoodDeliveryReleasePosition); atraso (500); fooddelivery.write (FoodDeliveryReleasePosition); // espera a comida cair delay (1000); fooddelivery.write (FoodDeliveryHoldPosition); delay (150); // Isso é para adicionar um atraso entre a entrega da comida e a liberação do gatilho rotater.write (89); atraso (1000); // Libere a catapulta !! trigger.write (TriggerReleasePosition); atraso (3000); // demora para o animal encontrar a comida - edite para alterar a rapidez com que a comida é entregue :)}
Esquemas
Processo de manufatura
- Projeto higiênico para as indústrias de alimentos e processamento
- Controlador, dicas de seleção de gravador para aplicativos de alimentos e bebidas
- Masterbatches de cor de acetal para automotivo e mais com base em transportadores de baixa emissão
- B&R lança computador 'high-end' para veículos agrícolas e de construção autônomos
- Dicas para usinagem CNC de titânio:aeroespacial e muito mais
- Cabeçote deslizante automático para torneamento suíço e de produção
- Dicas para aplicar o lubrificante de metal:como evitar o excesso de graxa e muito mais
- Invar:tendências de armazenamento inteligente para 2021 e além
- Máquinas automáticas de venda de alimentos - Versatilidade do produto
- Saber quando e como escolher uma bomba de reforço automática para sua casa