


Suporte para câmera FPV de eixo duplo com módulo Joystick
Componentes e suprimentos
 |
| × | 1 | |||
| |
| × | 2 |
Sobre este projeto
Olá pessoal,
Hoje veremos o tutorial completo de como controlar o berço da câmera FPV de 2 eixos com módulo joystick, o berço da câmera vem em uma pequena embalagem contendo alguns suportes e peças de acrílico, alguns parafusos e dois servo motores.
Requisito:Portanto, antes de continuar, se você não está familiarizado com o joystick, nem com os servo motores, aqui estão dois tutoriais para você:
- Como fazer a interface simples do módulo Joystick com a placa Arduino
- Use servo motores com Arduino
Então aqui vamos usar dois métodos para controlar os servos:o primeiro onde os servos seguem a posição do joystick e se movem enquanto movemos nosso manche, o segundo os servos começam a se mover na direção para onde o joystick está apontando e eles permanecem lá até que movamos o manche novamente ou mudemos de direção.
Esta é uma demonstração do que teremos no final:
No vídeo tutorial, fui passo a passo durante a fiação ou calibração também passo a passo durante a codificação, mas aqui vou dar-lhe toda a fiação que não é um problema porque nenhum módulo ou servo está afetando os outros.
Para não ser confundido com o eixo do joystick que meu joystick tem (eixo X no topo e depois eixo Y) aqui na imagem eles estão invertidos e nomeados de outra forma, mas eu deixei a fiação que usei você pode alterá-la como quiser (pinos de servo, joystick entradas, direções ...)
Então, para não te confundir, porque na verdade usei muitos códigos no vídeo, mas eles são muito básicos (posicionamento do servo, leitura do valor analógico do joystick ...) Eu fiz isso antes que você pudesse verificar meus outros tutoriais, então aqui Eu só carreguei os dois códigos para as duas versões finais, conforme visto no vídeo.
Se você precisar de alguma coisa sobre isso, pode entrar em contato comigo.
Código
- Código 1 como em vídeo
- Código 2 como no vídeo
Código 1 como no vídeo Arduino
// Este código deve ser usado com base de câmera fpv de eixo duplo que usa dois servos, adicionando um módulo de joystick // controlamos a posição da base movendo o stick analógico, a base segue os movimentos do joystick // Consulte surtrtech.com para obter mais informações # inclua// Biblioteca Servos e declaraçãoServo myservo1; Servo myservo2; int YAxis =1; // Declarando onde os eixos X e Y dos pinos do joystick estão wiredint XAxis =0; // Claro que as entradas analógicas evitam o setup () {Serial.begin (9600); // Configurando a taxa de transmissão do monitor Serial e iniciando pinMode (XAxis, INPUT); // Declarando os modos de pino e pinos de servo myservo1.attach (8); pinMode (YAxis, INPUT); myservo2.attach (9);} void loop () {int X =analogRead (XAxis); // Leitura do potenciômetro do eixo X X =X * 0.1756; // Convertendo a faixa do potenciômetro de 0-1023 para 0-180 limites do servo, você pode alterá-los se tiver um servo 360 ° X =180-X; // Isso é usado para que o servo gire para a posição exata, caso contrário será invertido myservo1.write (X); // Após a adaptação, injetamos esse valor no primeiro servo int Y =analogRead (YAxis); // Leitura do potenciômetro do eixo Y Y =Y * 0,1466; // Aqui fizemos uma conversão que se adequa aos limites do servo, então fomos de 0-1023 a 0-150 myservo2.write (Y); // E injetamos em nosso servo}
Código 2 como no vídeo Arduino
// Este código deve ser usado com berço de câmera fpv de eixo duplo que usa dois servos, adicionando um módulo de joystick // Nós controlamos a posição do berço movendo o stick analógico, o berço se move na direção onde o stick está apontar // até os limites e permanecer lá // Consulte surtrtech.com para obter mais informações # include// Biblioteca e declaração ServosServo myservo1; Servo myservo2; int a, b, X, Y; // Variáveis necessárias laterint YAxis =1; // Declarando onde os eixos X e Y dos pinos do joystick estão wiredint XAxis =0; // Claro que as entradas analógicas evitam o setup () {Serial.begin (9600); // Configurando a taxa de transmissão do monitor Serial e iniciando pinMode (XAxis, INPUT); // Declarando os modos de pino e pinos de servo myservo1.attach (8); pinMode (YAxis, INPUT); myservo2.attach (9);} void loop () {a =myservo1.read (); // Ler as posições dos servos anteriores é um passo importante para que possamos saber onde eles devem ser posicionados a seguir b =myservo2.read (); X =analogRead (XAxis); // Lendo os valores do joystick Y =analogRead (YAxis); if (X> 550) {// Aqui não fizemos nenhuma calibração, então o joystick tem três posições (Esquerda | Descansando | Direita) a =a-1; // depende do valor que lemos, podemos saber para qual direção o stick está apontando e eu deixei a posição de repouso grande, na verdade, é apenas 1 valor myservo1.write (a); // injetamos o novo valor delay (50); // Você pode aumentar ou diminuir o atraso ou agir em a =a-x para dar passos grandes ou pequenos} if (X <450) {a =a + 1; // Aqui fizemos a operação oposta para mover para a direção oposta myservo1.write (a); atraso (50); } if (Y> 600) {// Aqui não fizemos nenhuma calibração, então o joystick tem três posições (Up | Resting | Down) idem b =b + 1; myservo2.write (b); atraso (50); } se (Y <450) {b =b-1; myservo2.write (b); atraso (50); }
Esquemas
Existe um servo superior e um servo inferior, não os confunda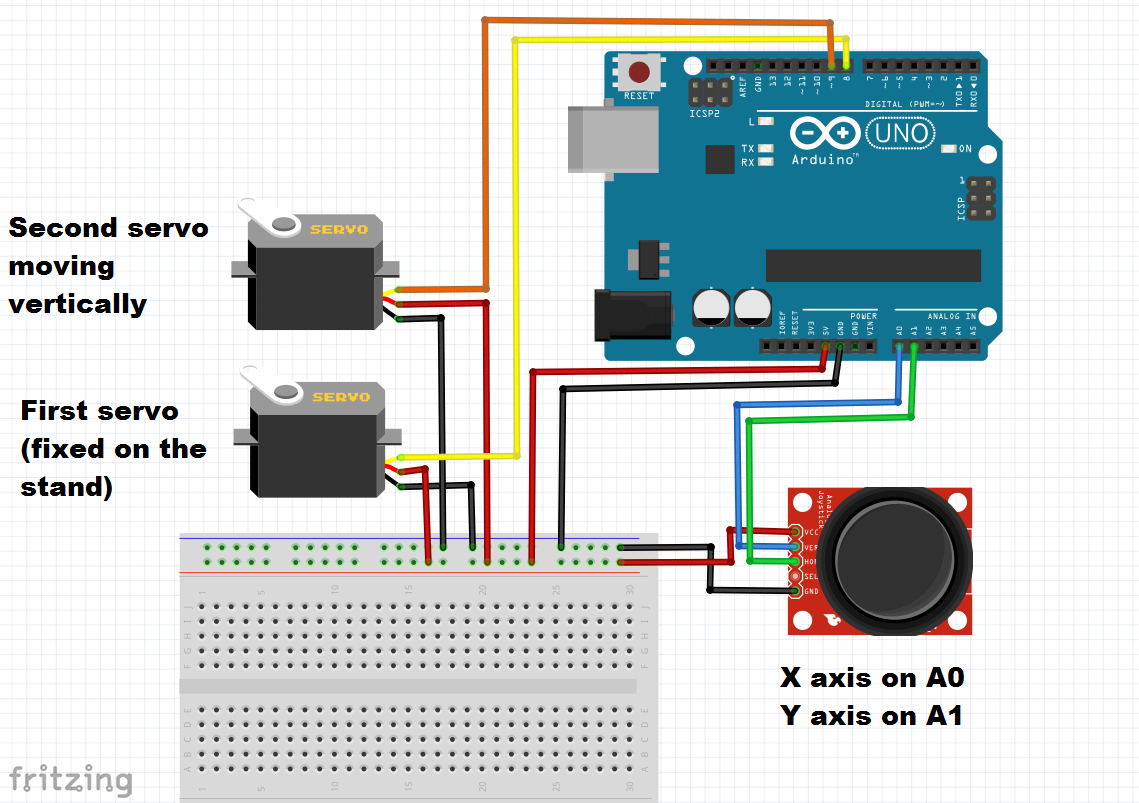
Processo de manufatura
- Controle de acesso com QR, RFID e verificação de temperatura
- Framboesa com came na gaiola
- Câmera de segurança Discord com ESP32
- Desinfecção do robô com luz ultravioleta
- Aceitar moeda de controle com Arduino
- Controle remoto de TV a bateria com caixa impressa em 3D
- Obstáculos para evitar o robô com servo motor
- Arduino com Bluetooth para controlar um LED!
- Torno com CNC
- Controle de recursos de torno inclinado com gráficos de verificação