


Desinfecção do robô com luz ultravioleta
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 |
Ferramentas e máquinas necessárias
 |
|
Sobre este projeto
Introdução ao robô
O Ultraviolet Germicida Robot (UV Robot) é um robô teleoperado equipado com um sistema de luz ultravioleta. O sistema contém um veículo robô em movimento e um controlador de estação terrestre (GCS). O operador pode controlar o robô usando o joystick do controlador da estação terrestre (GCS) enquanto observa a alimentação da câmera do robô.
O robô pode desinfetar e matar doenças, vírus, bactérias e outros tipos de microorganismos orgânicos nocivos no ambiente, com luz ultravioleta, quebrando sua estrutura de DNA. Atualmente, vários países testaram esses robôs com sucesso para desinfetar hospitais, transportes públicos, escritórios e outros locais públicos. Implementamos este robô UV de forma econômica para expandir o processo de desinfecção para locais públicos.
Por que não desinfetantes líquidos?

O método mais comum e popular para desinfetar locais públicos é borrifar líquidos desinfetantes que são líquidos à base de álcool a 70%. Recentemente, a Organização Mundial da Saúde (OMS) anunciou que é muito prejudicial o uso regular de líquidos desinfetantes em locais públicos. Isso pode causar problemas no sistema respiratório devido ao seu cheiro forte, causar irritação na pele e pode levar a desequilíbrios no meio ambiente.
Além disso, este método está associado a um enorme custo de material e mão de obra diariamente.
Vantagens do robô UV
- Custo único (não há necessidade de reabastecer com álcool ou cloro líquido).
- Pode ser usado para desinfetar superfícies, roupas médicas, máscaras médicas e outros equipamentos médicos.
- Reduza o tempo de desinfecção em 60% quando comparado aos métodos de desinfecção à base de líquido. (O tempo de secagem é consideravelmente alto quando usado em ambientes onde os materiais de tecido estão disponíveis).
- Capacidade de uso em ambientes com equipamentos eletrônicos.
- Um operador pode cobrir uma grande área. (Não há necessidade de várias pessoas, como em sprays líquidos)
- Testamos e comprovamos uma taxa de desinfecção de 99,997% para este robô em colaboração com um laboratório de microbiologia em uma universidade local. (Explicado na última seção)
Irradiação germicida ultravioleta (UVGI)
A irradiação germicida ultravioleta (UVGI) é um método de desinfecção que usa luz ultravioleta de comprimento de onda curto (ultravioleta C ou UVC) para matar ou inativar microorganismos destruindo ácidos nucléicos e interrompendo seu DNA, deixando-os incapazes de realizar funções celulares vitais. UVC é absorvido por bases de RNA e DNA e pode causar a fusão fotoquímica de duas pirimidinas adjacentes em dímeros covalentemente ligados, que então se tornam bases não emparelhadas.
O UVGI é usado em uma variedade de aplicações, como purificação de alimentos, ar e água. UVGI pode ser usado para prevenir a propagação de certas doenças infecciosas. Lâmpadas de descarga de mercúrio (Hg) de baixa pressão e LEDs são comumente usados em aplicações de UVGI e emitem radiação ultravioleta C de onda curta (100–280 nanômetros), principalmente a 254 nm.
Cada tipo de microrganismo requer uma dosagem diferente de luz ultravioleta para inativar sua funcionalidade. Considerando a situação da Covid-19, a inativação do mesmo vírus usando luz ultravioleta é considerada aqui. Na maioria dos trabalhos e artigos de pesquisa, os grupos de pesquisa mencionaram a luz ultravioleta necessária para o processo de esterilização em termos de "Joule por metro quadrado" ou "Joule por centímetro quadrado". Mas ao considerar os parâmetros e especificações da luz ultravioleta, os fabricantes forneceram a intensidade da luz ultravioleta em termos de "Microwatt (uW) por centímetro quadrado" a uma distância de 1 metro.
A unidade "Watt (W)" representa a energia emitida em um período de um segundo. Microwatt por centímetro quadrado representa a energia que passa por uma área de um centímetro quadrado em um segundo.
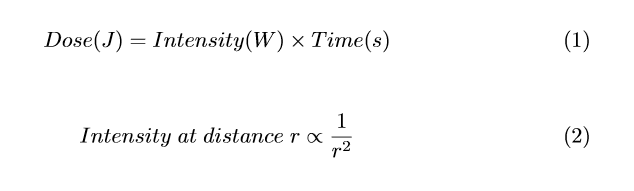
Equação 1 mostra a relação entre a dosagem e a intensidade. Conclui que diferentes dosagens podem ser alcançadas variando o tempo de exposição à mesma fonte de luz UV.
A relação entre a intensidade de UV e a distância é mostrada pela Equação 2. De acordo com isso, pode-se concluir que a intensidade do UV diminui com a distância da fonte de luz.
De acordo com a Wikipedia, uma dosagem de 8mJ pode inativar a maioria dos vírus.
Compreender a funcionalidade do robô
O sistema geral é um pouco complexo, pois adicionamos algumas funcionalidades e recursos de segurança para atender aos padrões da indústria. Antes de explicar o procedimento de implementação, é bom entender como o sistema funciona.
O robô possui 3 componentes principais.
1 O veículo terrestre

Esta parte é movida por duas rodas movidas por motoredutores DC (Um robô de acionamento diferencial). Existem duas rodas de rodízio na frente e atrás para manter o equilíbrio. Colocamos o sistema de controle eletrônico e a bateria, que é uma bateria de ácido-chumbo 12V 35Ah, dentro do veículo terrestre.
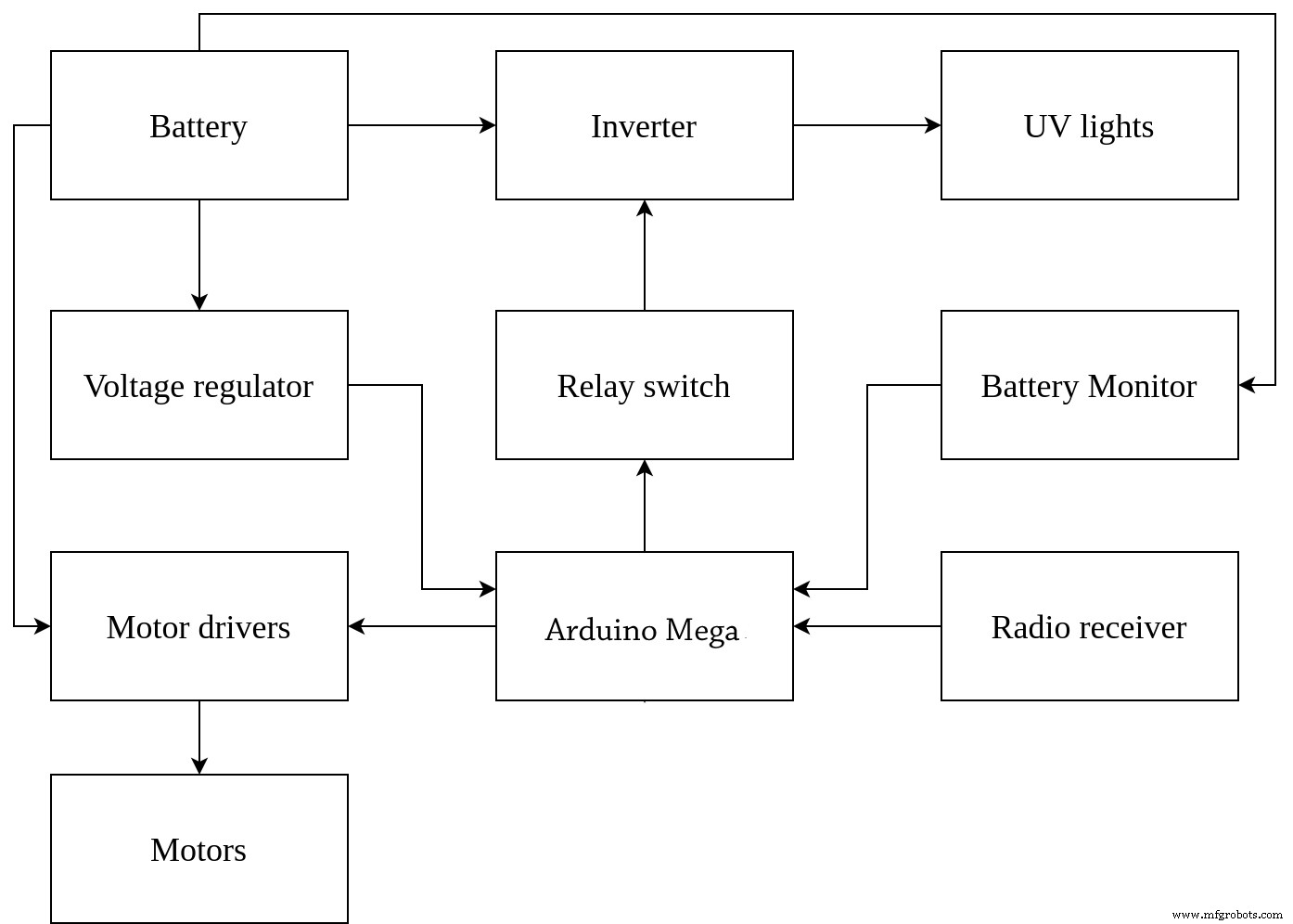
O Arduino Mega é alimentado pela bateria principal através de um módulo regulador de tensão para reduzir a tensão de 12V para 5V. Um receptor de rádio RC de quatro canais com saídas PWM está conectado à placa Mega. Os motores são acionados por meio de um driver de motor ponte H de canal duplo que é conectado à placa Arduino. Um inversor é conectado entre as luzes UV e a bateria e controlado por meio de uma chave de relé conectada à placa Arduino.
2. A torre de luz ultravioleta
Usamos lâmpadas ultravioleta fluorescentes que requerem uma unidade de reator eletrônico separado para energizar a lâmpada. A torre de iluminação contém 6 lâmpadas UV que são colocadas em torno de um cilindro de alumínio feito de uma folha de alumínio, enrolando-o. Este cilindro de alumínio atua como um refletor para os raios ultravioleta.
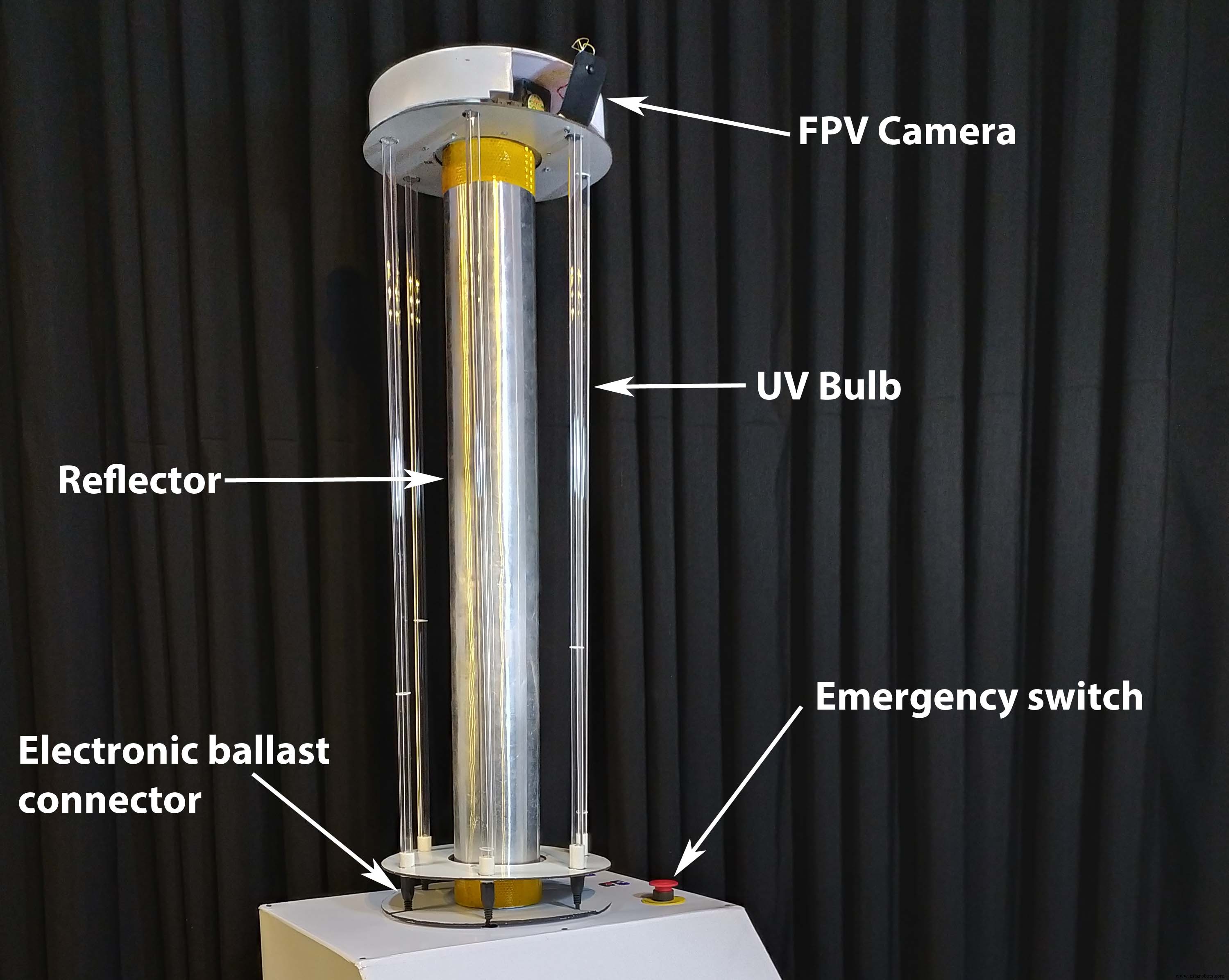
Todos os reatores eletrônicos são colocados dentro do cilindro de alumínio. No topo da torre, há uma câmera FPV e um transmissor FPV para transmitir o feed de vídeo ao GCS. A torre UV é fixada no topo do veículo terrestre.
3. Controlador de estação terrestre

Este é o controle remoto do robô. A tela mostra o feedback da câmera recebido do robô. O joystick é usado para mover o robô. As luzes UV podem ser ligadas e desligadas usando o interruptor UV. A chave de arme atua como uma chave de segurança. Ele reduz todas as funcionalidades do ao ligar.
Ligando luzes ultravioleta

Para o nosso robô, selecionamos 6 lâmpadas UV com as seguintes especificações.
- Potência - 55w
- Comprimento de onda - 254 nm
- comprimento - 890 mm
- diâmetro do tubo - 15 mm
- tipo - extremidade única 4 pinos
Estas não são especificações estritas, exceto o comprimento de onda. A unidade de reator eletrônico é conectada aos 4 pinos da lâmpada UV. Lâmpadas UV acenderão quando a energia for fornecida para o reator eletrônico.
*** A luz ultravioleta é prejudicial à pele e aos olhos humanos. Não exponha seus olhos e pele por um longo período. Observar a luz através do vidro é o procedimento mais seguro, pois a luz ultravioleta não consegue penetrar no vidro transparente. *** Sistema de Vídeo FPV
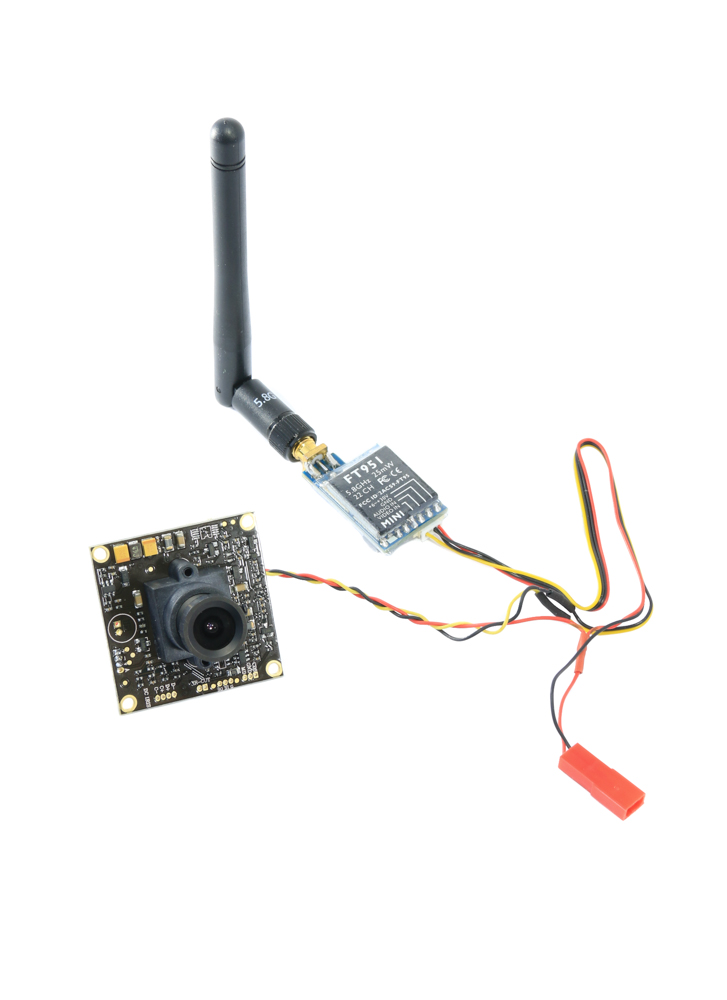

FPV os sistemas de vídeo são usados principalmente em drones para obter a visão aérea. Em nosso caso, o uso de um sistema FPV torna fácil obter o feed de vídeo do robô sem qualquer programação ou componentes de soldagem. O robô possui uma câmera e um transmissor de vídeo. Basta conectar a alimentação a este sistema e ele começará a transmitir o feed de vídeo em 5,8 GHz.
O GCS possui uma tela LCD com um receptor de vídeo de 5,8 GHz integrado. Assim que você ligar a tela, ela começará a mostrar o feed da câmera.
Construindo o Veículo Terrestre
A estrutura principal é feita com barras de aço de 0,75 '. A seguir está o design usado para o nosso robô, mas não se limite a ele. Altere o design de acordo com suas necessidades.
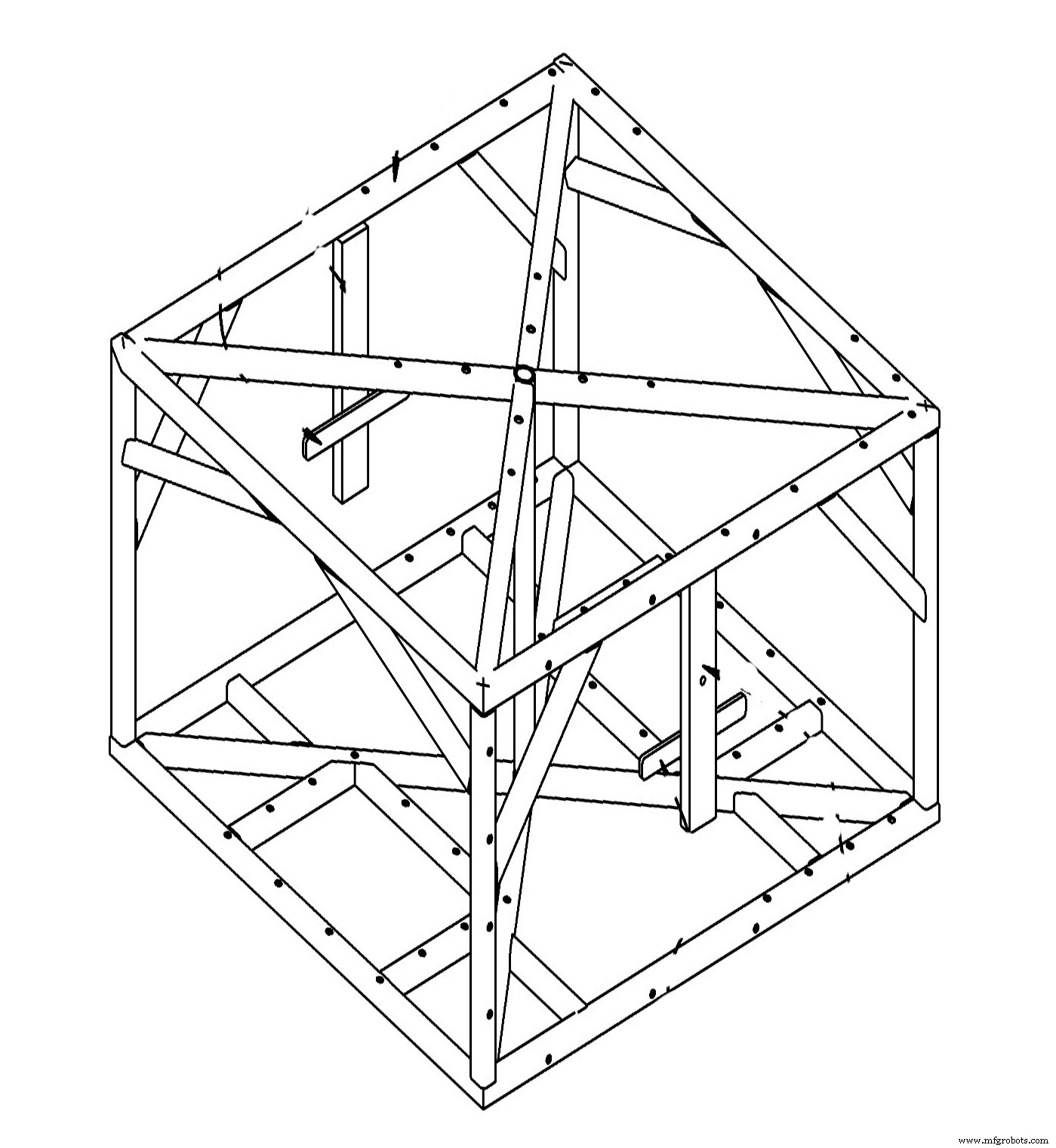
O quadro deve ter espaço e mecanismo para montagem de dois motores e duas rodinhas na parte inferior. Dentro da estrutura, deve haver um mecanismo para travar a bateria de chumbo-ácido. Em nosso robô, usamos placas de revestimento para cobrir o quadro.
Os fios dos dois motores são conectados aos pinos de saída do driver do motor. Este procedimento pode ser facilmente encontrado na internet, portanto não se destina a descrever todo o procedimento.
O esquema do sistema de controle eletrônico é anexado por último. Canal 1 - os pinos de sinal PWM do canal 4 do receptor RC são conectados à placa Arduino dos pinos 18 - 21. Cada canal é configurado da seguinte maneira no código. Você pode alterá-lo como desejar.
- Ch 1 - interruptor UV
- Capítulo 2 - Botão de arme do robô
- Capítulo 3 - Comandos para frente / para trás
- Capítulo 4 - Comandos para virar à esquerda / direita
Isso também pode ser alterado ao construir o GCS.
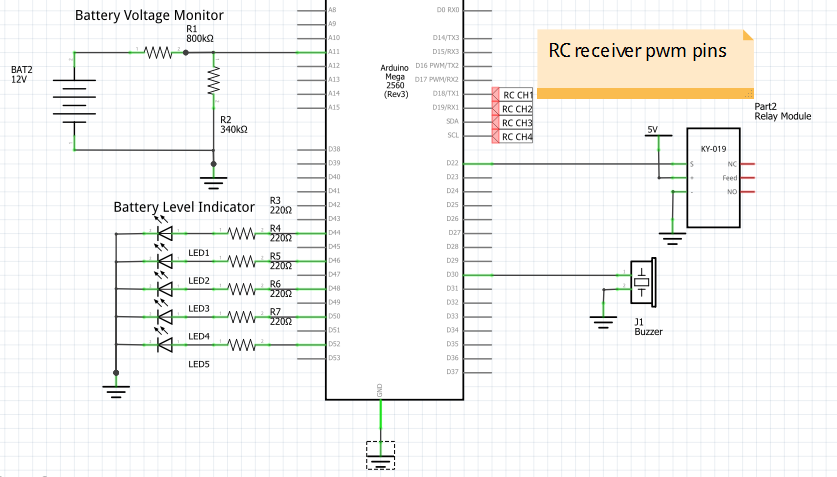
Os pinos do driver do motor são conectados aos pinos 3 - 11 do Arduino, conforme mostrado no esquema.
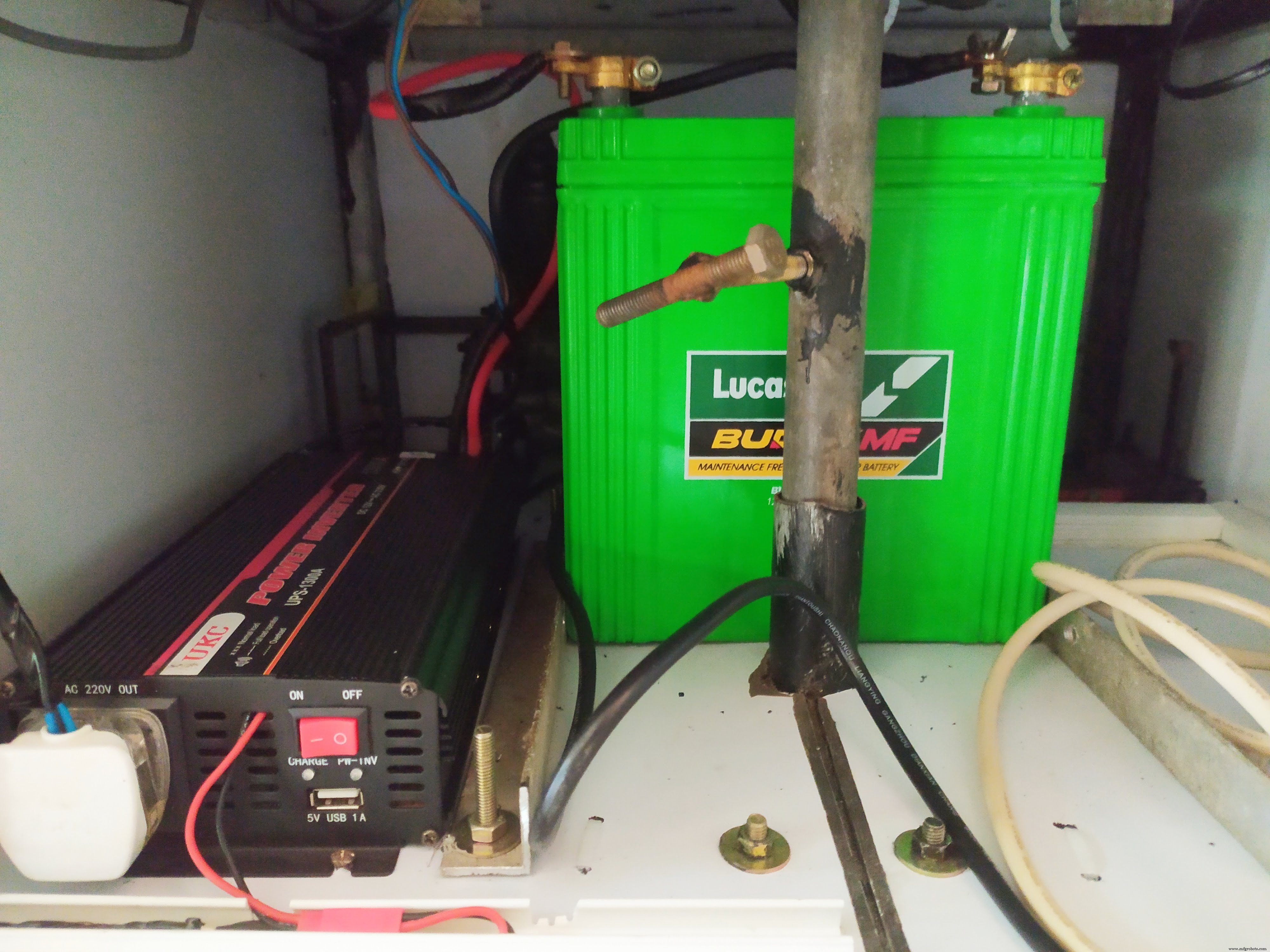
Para converter 12v para AC 230V para alimentar as luzes ultravioleta, um circuito inversor é usado aqui. Adquirimos uma unidade inversora disponível comercialmente com um carregador embutido. Isso ajuda a evitar a complexidade do sistema eletrônico, permitindo-nos carregar a bateria de chumbo-ácido usando os pontos de energia existentes.

Em nosso caso, usamos um inversor de onda senoidal modificado que tem uma eficiência de cerca de 70%. Para energizar todos os reatores eletrônicos com a eficiência de 70%, a potência necessária do inversor é de 470W. Com todas as margens de segurança, compramos um inversor de 1kW.,
Os terminais da bateria são conectados à entrada de 12 V e os reatores E. são conectados às portas de saída CA. O botão liga / desliga é removido. Existem 3 fios disponíveis no switch; fio comum, fio terra e fio de alimentação. Esses 3 fios são conectados à chave de relé da seguinte maneira para controlar as luzes UV da placa Arduino.
- Cabo comum -> Comum
- Fio terra -> NC
- Ligue o fio -> NÃO
Incluímos um interruptor de energia do sistema, um interruptor de energia UV e um interruptor de corte de emergência para cumprir os padrões industriais do robô.
Construindo a torre de luz ultravioleta
A parte central da torre contém uma folha de alumínio. Uma folha é enrolada para fazer um cilindro com 15 cm de diâmetro. Duas placas de revestimento em forma de círculo com um diâmetro de 30 cm são colocadas na parte superior e inferior do cilindro. Estes são usados como porta-lâmpadas UV. Ambas as placas de revestimento têm orifícios de 19 mm para se adaptarem à luz ultravioleta. E. Os reatores são fixados dentro do cilindro de alumínio usando fitas adesivas de dupla face.


O sistema de câmera FPV é montado no topo da torre e dois fios são colocados na parte inferior através do cilindro.
Construindo a Estação de Controle Terrestre

A seguir estão os componentes necessários para a Estação de Controle de Solo (GCS).
- Transmissor RC 2,4 GHz 4Ch
- Tela FPV
- 2 X interruptores de alternância
- 1 X botão liga / desliga
- 18650 células de bateria
- Módulo de sistema de gerenciamento de bateria de 3 células para 18650
- Fonte de alimentação comutada 12V, 5A
O transmissor Rc contém 2 joysticks e vários interruptores. Aqui, nosso interesse é apenas em um joystick, o circuito e o LED indicador. Remova o invólucro do transmissor e observe como os joysticks são detectados pelo circuito. Cada joystick contém dois potenciômetros que são conectados à placa de circuito. Com base na posição do joystick, o potenciômetro altera sua resistência para que o circuito possa ler a posição do joystick.
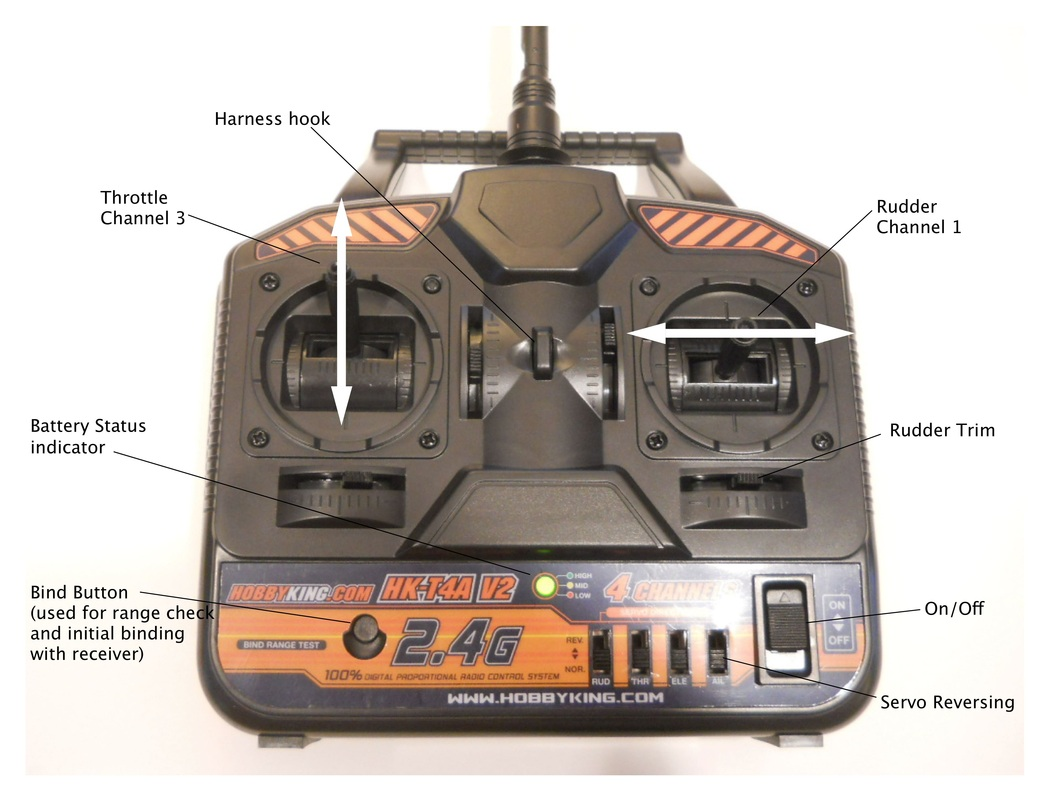
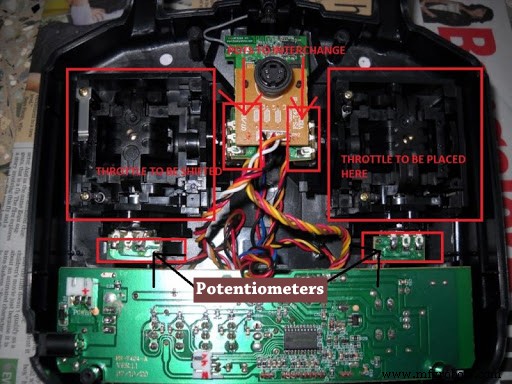
Remova um joystick e seus dois potenciômetros. Solde as respectivas extremidades dos fios nas duas chaves de alternância. Agora temos um joystick e duas chaves de alternância para controlar todos os 4 canais. Um botão atua como botão de arme do robô e o outro atua como botão de controle de luz ultravioleta. O LED indicador pode ser usado como monitor de bateria do GCS, uma vez que muda sua cor para vermelho quando a bateria está fraca.
Agora precisamos fazer uma fonte de alimentação para o transmissor e para a tela FPV. A voltagem da célula de uma bateria 18650 é 3,7V. Quando totalmente carregado, torna-se 4,2V. Para isso, conectamos 3 células em série para obter cerca de 12V. No nosso caso, usamos células com capacidade de 1000mAh. Para aumentar o tempo de execução do GCS, usamos 9 baterias, 3 conjuntos de células conectadas em série em paralelo para obter capacidade de 3000mAh. Em seguida, conectou o módulo BMS para proteger a bateria.
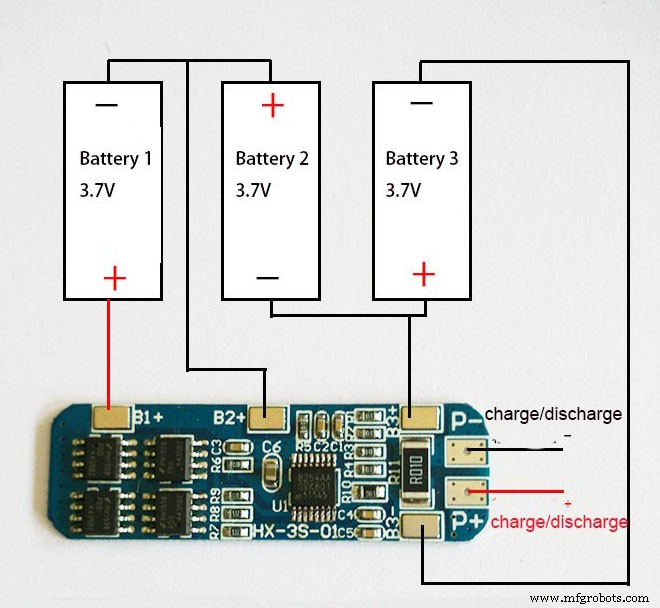
O P + e P- são conectados à entrada de energia do transmissor e à entrada de energia da tela do FPV. A fonte de alimentação comutada de 12 V (SMPS) vem com um potenciômetro para ajustar a tensão de saída dentro de uma faixa limitada. Defina-o para 12,8 e conecte a saída de tensão a P + e P- do BMS. Isso ajudará a carregar a bateria quando o SMPS estiver conectado.
Você pode projetar um gabinete para isso de acordo com sua preferência.
Codificação
A primeira tarefa do código é ler as entradas do canal RC. Como estamos usando um receptor PWM, usei interrupções para ler os valores PWM. Para facilitar as coisas, incluí uma biblioteca PWM para usar interrupções, definindo o pino conectado da seguinte maneira.
PWM ch1 (18); // Configure o pino 18 para entrada
PWM ch2 (19); // Configuração do pino 19 para entrada
PWM ch3 (20); // Configuração do pino 20 para entrada
PWM ch4 (21); // Configure o pino 21 para entrada Na sequência de inicialização, o código verifica a tensão da bateria e se a chave UV está ligada. Se detectar algum de um, o procedimento de inicialização aguardará até que todos sejam corrigidos.
// verificar a tensão da bateria
battery_voltage_monitor ();
while (batterylow ==true) {
battery_voltage_monitor ();
low_battery_notification ();
}
// verifique se o uv swtich está desligado
rc_read ();
while (uv_pwm> switch_on_pwm) {
rc_read ();
uv_on_warning_at_startup (); // tom da campainha
} Ao operar os motores, a tensão da bateria cai criticamente apenas naquele momento. Para evitar que o alarme de baixa tensão seja disparado toda vez que movemos o robô, a parte de monitoramento da bateria só funciona quando o robô não está se movendo.
if (robot_moving ==false) {
battery_voltage_monitor (); // monitora a bateria quando o robô não está se movendo
} Todas as outras funções, incluindo o controle do driver do motor, a geração de tons com buzzer e o controle do relé, funcionam da maneira usual. Você pode seguir um tutorial geral sobre os tópicos acima, se não estiver ciente deles.
Procedimentos operacionais
Procedimento de inicialização
Controlador GCS
1. Ligue o interruptor principal.
2. Certifique-se de que o interruptor de arme do robô e o interruptor de luz ultravioleta estejam desligados. (Na posição para baixo).
Robô
1. Ligue o botão liga / desliga.
2. Aguarde o tom de início.
3. Aguarde o tom de OK do sistema.
Controlando o Robô
1. Ligue o botão de arme do robô.
2. Mova o joystick para mover o robô.
3. Ligue o interruptor UV para ligar as luzes UV. Quando a chave de arme do robô está na posição desligada, a chave UV não funciona.
Indicador de nível de bateria
1. Certifique-se de que a bateria tenha pelo menos 4 barras piscando para operar o robô.
2. Quando a bateria está fraca, a campainha emite um bipe com as duas últimas barras do indicador de nível da bateria piscando.
Procedimento de Carregamento
1. Desligue o robô.
2. Desligue o GCS.
3. Conecte o inversor a um ponto de energia. (Normalmente, os inversores têm um indicador de nível de carga embutido)
Considerações Gerais
1 Uso em áreas lotadas
A luz ultravioleta é prejudicial aos olhos e à pele humanos. A exposição à luz em intervalos curtos (menos de 3 m) por mais de 60 segundos pode causar danos aos olhos e causar irritação na pele. No entanto, os feixes ultravioleta não podem penetrar em nenhum meio sólido. Olhar para a luz ultravioleta através de um vidro transparente não afeta os olhos ou o corpo humano.
2. Materiais e dispositivos sensíveis
Os plásticos macios são altamente sensíveis à luz ultravioleta. Plásticos macios são comumente usados em brinquedos e embalagens de alimentos. Portanto, o dispositivo não pode ser usado em lojas de brinquedos, supermercados e onde os itens acima estão disponíveis. No entanto, as lâmpadas ultravioleta podem ser utilizadas para desinfetar pisos das áreas acima mencionadas.
3. Capacidade de uso em hospitais
Em ambientes hospitalares, a luz ultravioleta é útil para desinfetar superfícies de alto contato em um período muito curto. Mas a eficácia da luz ultravioleta para equipamentos médicos e medicamentos deve ser considerada neste cenário.
Os equipamentos médicos com invólucros de plástico são feitos de plástico rígido, pois são submetidos a um tratamento de radiação durante o processo de fabricação. Além disso, não há efeitos comprovados para a eficácia da luz ultravioleta para os medicamentos armazenados em hospitais.
Além disso, todos os equipamentos médicos de aço inoxidável e máscaras N95 podem ser esterilizados usando o mesmo dispositivo.
4. Eficácia para as áreas sombreadas
A luz ultravioleta reflete das superfícies da mesma forma que as luzes visíveis. Portanto, as áreas que não recebem a luz ultravioleta direta, recebem a luz ultravioleta refletida. No entanto, áreas muito cobertas ou sombreadas não recebem luz ultravioleta eficaz. Essas áreas também não são desinfetadas com métodos baseados em líquidos de desinfecção.
5. Outras considerações
A luz ultravioleta gera ozônio ao trabalhar em ambientes fechados por períodos mais longos. Como prática geral, todos os ambientes fechados são ventilados por 20 minutos após serem esterilizados por luz ultravioleta.
Código
Código para Arduino Mega
https://github.com/tharindusuraj/Ultraviolet-Germicidal-RobotEsquemas
uv-x_Q9R5T59Q32.fzz
Brinque com Fire Over Wi-Fi (ESP8266, NeoPixels e aplicativo Android)
Aceitar moeda de controle com Arduino
Processo de manufatura
- Um robô móvel com prevenção de obstáculos baseada na visão
- Raspberry Pi Webcam Robot - Melhor tutorial de streaming de vídeo
- Robô controlado pela Web Raspberry Pi com vídeo
- Robô de classificação de reciclagem com Google Coral
- Obstáculos para evitar o robô com servo motor
- Sistema de rega automática de plantas com Arduino
- Hino Nacional dos EUA com Luzes e Tom
- Controlar Arduino Robot Arm com aplicativo Android
- Vídeo:verificação em processo de um perfil transformado—via robô
- Centro de giro equipado com braço robótico