


Mini Elevador
Componentes e suprimentos
 |
| × | 1 |
Ferramentas e máquinas necessárias
|
Aplicativos e serviços online
 |
|
Sobre este projeto
Este é um elevador de 5 andares em funcionamento. Tem 3 metros de altura. Colocamos muito trabalho nisso.
Vamos direto ao assunto ... é assim que funciona!
Links Rápidos:
- Código
- Diagrama de fiação (em breve)
Inspiração
Estamos jogando com Arduino e processamento integrado / IoT há alguns anos, mas a maioria dos projetos que fizemos (e a maioria que vimos) são muito simples. Há muito tempo que procuramos algo “real” para fazer.
Neste verão, fui a um acampamento de verão incrível, o Projeto Ember. É na área da Baía de São Francisco e é incrível! As crianças projetam e constroem grandes estruturas de madeira com ferramentas elétricas. Assim que soube que poderia fazer isso, quis combinar a construção física com o Arduino e esse é o resultado!
Abordagem
A parte mais difícil de descobrir isso foi a técnica de detecção do motor e do piso. Um elevador real provavelmente usa um grande motor A / C com sensores em cada local do andar. Certamente poderíamos usar essa abordagem com uma escala menor, mas colocar sensores em cada andar exige muita fiação, e teríamos preocupações sobre sensibilidade e alinhamento, etc. Por outro lado, um motor de passo pode ser posicionado com precisão ... mas nós teria que saber exatamente onde estamos e até onde temos que ir para fazer isso.
Felizmente, fizemos algo semelhante em nosso projeto anterior de “calendário sofisticado”. Lá, descobrimos como usar motores de passo e, o que é mais interessante, como salvar suas posições na memória não volátil (EEPROM no Arduino). Portanto, usaremos a mesma abordagem aqui. Dessa forma, não precisamos de nenhum sensor de posição, apenas contaremos com nossa capacidade de contar o número de passos que movemos nosso motor de passo.
A outra preocupação do projeto era com os botões de chamada do elevador. Eles precisam ser interruptores de contato momentâneos acesos, mas as luzes precisam ser controláveis independentemente do botão. Encontramos alguns adequados no eBay.
Materiais
Botões com luzes separadas (compramos no eBay, eles devem ser semelhantes a:


- Um Arduino Mega2560 - escolhemos este porque tinha mais pinos GPIO para todos os sinos e assobios do projeto. Compre oficial - você pode conseguir uma imitação / compatível mais barato.
- Uma matriz de LED 8 × 8 para mostrar as setas Comprar (Amazon)
- Um display de sete segmentos para mostrar os números dos andares Comprar (SparkFun)
- Um motor de passo e placa de motorista para mover o carro Compre 5-pack (Elegoo) Observação:você só usa um, mas pode precisar de mais. E você pode reutilizar a caixa em que eles vêm. 🙂
- Um protoboard Mega2560, para conectar nossos fios Compre (BangGood) Desoldamos o cabeçalho na parte superior, você não precisa.
- Terminais de parafuso (10 × 2) Comprar (frys.com) Você precisará de 4
- Carretel de linha
Você pode encontrar todos os materiais abaixo em seu Home Depot local ou outra loja de materiais de construção:
- Fiberboard e 3/4 sq em moldagem para elevador e carro.
- Suporte angular de alumínio para segurar o motor
- Parafusos diversos
- Mangueira para atuar como bucha dentro do carretel
- Corda (usamos cordas de papagaio de náilon resistentes)
Construir
Fizemos o eixo e o carro em papelão e moldagem para reforçar os cantos.
Começamos com o poço do elevador. Cortamos 3 pedaços de fibra de papel de 36 ″ x8 ″ nas laterais e na parte traseira (a frente fica aberta). Em seguida, usando 4 peças de moldagem quadrada de 3/4 ″ de 36 ″ de comprimento, aparafusamos o painel de fibra para fazer um eixo vertical. Pedaços quadrados de papelão na parte superior e inferior mantêm tudo quadrado.
O carro do elevador é o próximo. Ele usa o mesmo tipo de construção, com paredes, teto e pisos de fibra de vidro e suportes de moldagem de pinho. Tem quase toda a largura do poço, mas fica entre a frente e a parte de trás do pinheiro (por isso é mais largo do que profundo). Colocamos um gancho no topo do carro, de modo que ele fique pendurado por um fio.

Certifique-se de não colocar um fundo no seu eixo muito cedo, porque você precisa ser capaz de entrar e sair do carro! Assim que o teste for concluído, você pode adicionar a parte inferior.
O motor fica em cima do elevador. Colocamos um carretel de madeira normal (de linha de costura) no eixo do motor. Isso é um pouco complicado. O eixo do motor tem uma borda plana, mas é claro que o orifício no carretel é redondo. Então, perfuramos e abrimos um orifício no carretel e colocamos um parafuso para segurá-lo contra a borda plana do eixo do motor. Além disso, o orifício na bobina é maior do que o eixo do motor. Para atuar como uma bucha para ocupar o espaço, usamos um pedaço muito curto de mangueira de borracha de tamanho adequado.

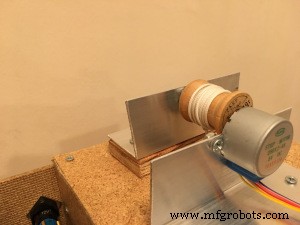
Em seguida, montamos o motor em um pedaço de ângulo de alumínio e aparafusamos no topo do eixo. Para apoiar o outro lado do carretel, colocamos um parafuso em uma segunda peça de cantoneira de alumínio. Isso faz com que o peso do elevador não tire o carretel do eixo do motor, mas ele ficará nivelado.
Usamos mais fibra para fazer os painéis de botões. À esquerda, usamos uma placa da altura do poço para os botões de chamada. Usamos botões vermelhos e verdes alternados. Vermelho para baixo, verde para cima. O piso superior possui apenas um vermelho e o inferior apenas um verde. Nosso painel ”no elevador” está à direita. Cortamos orifícios para a matriz de LED e a tela de sete segmentos, além dos 5 orifícios para os botões.


Montamos 4 caixas de parafusos. Dois no painel de chamadas e dois na lateral ao lado do painel “interno” do elevador.
Fiação
A fiação é complicada porque há muito! Optamos por usar um escudo de prototipagem do Arduino Mega, em parte porque já tínhamos um :-). Mas a verdadeira motivação era que, com tantos fios, estávamos preocupados que algo fosse inevitavelmente desconectado se apenas usássemos as conexões de pino padrão do Arduino. Com a blindagem de prototipagem, podemos soldar os fios diretamente e evitar esse risco. Além disso, nos deu um lugar conveniente para colocar coisas como resistores, que são necessários para nosso display de 7 segmentos.
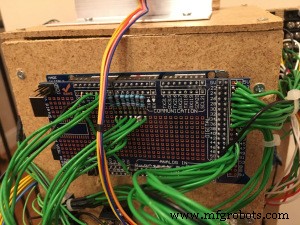
Dito isso, não queríamos todos esses painéis diferentes conectados juntos, porque se cometêssemos um erro, seria muito difícil consertar. Portanto, cada fio tem algum tipo de extremidade removível. Usamos blocos de parafusos entre os painéis de interruptores e o Arduino, e para a matriz de 7 segmentos e LED, uma extremidade do fio ainda são pinos de desconexão rápida.
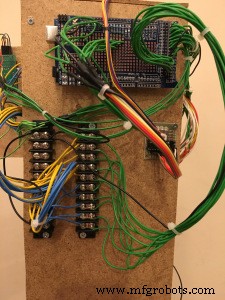
Para os painéis de botão, fizemos nossos próprios chicotes de fiação, usando conectores tipo forquilha fêmea que se encaixam perfeitamente nos terminais de botão. Como cada botão precisava de dois aterramentos (um para o botão e outro separado para a luz), haveria MUITOS fios de aterramento se todos eles fossem conectados ao Arduino. Então, em vez disso, conectamos todos eles em série com um belo chicote de fiação personalizado. Os pinos de sinal (um para o interruptor e um para a luz em cada botão) são todos separados, indo para os blocos de parafuso.


Finalmente, os blocos de parafuso nos deram outra vantagem - usamos fio de núcleo sólido para soldar à blindagem de prototipagem, mas usamos fio trançado para os conectores crimpados na parte de trás dos botões. Os blocos de parafuso nos deram um lugar para mudar de um para o outro sem soldar.
Programação
Tivemos muitas revisões de código, mas aqui está a versão atual. A parte mais complicada do software é a lógica para descobrir para onde o carro do elevador deve ir. Se for no andar 2, alguém dentro quer ir para o 3, alguém quer descer do 4 e subir do 1 ... onde você vai primeiro?
A outra parte complicada é que a maneira que a biblioteca de motor de passo normalmente funciona é que, durante o tempo em que o motor está se movendo, nada está chamando a função “loop ()” do Arduino. Ainda assim, deve funcionar para alguém pressionar um botão enquanto o elevador está em trânsito. Portanto, você não pode ir até o destino em uma única etapa - você precisa se mover um pouco de cada vez, verificando se há botões pressionados (e possivelmente mudanças no destino) ao longo do caminho.
Você pode baixar nosso esboço do Arduino aqui.
Para fazer upload do código:
Você precisará baixar estas bibliotecas:
- LEDControlMS
- SevenSeg
Faça upload do código:
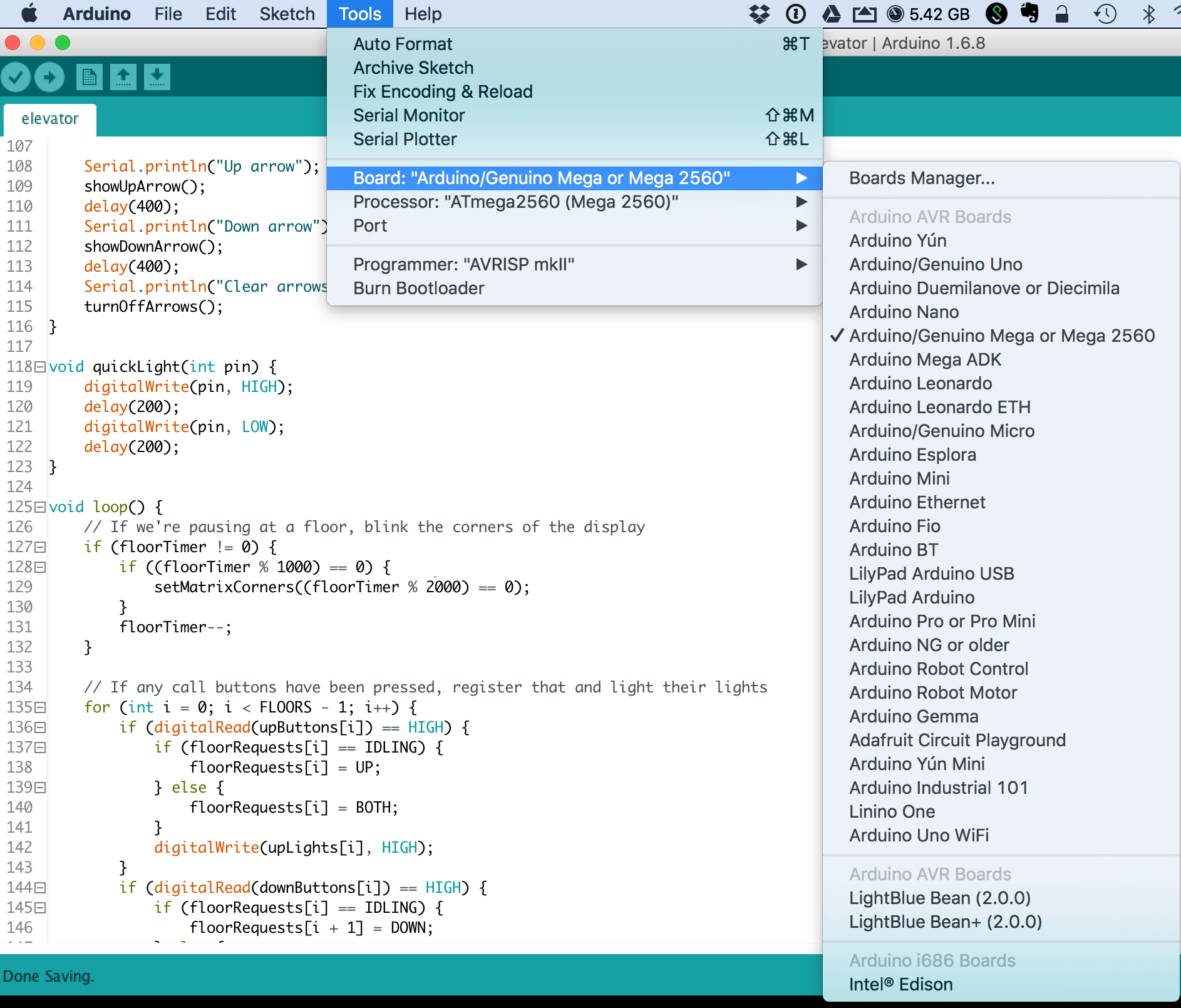
- Escolha o quadro certo:Veja esta imagem
- Escolha a porta:Semelhante, mas você vai em “Porta”. No MacOS, será algo como /dev/cu.usbmodem1411, enquanto no Windows, será algo como COM2.
- Faça upload do seu código.
Se sim, parabéns! Passe para o teste. Se não funcionou, volte para a etapa 5. Se não funcionar novamente, verifique a fiação. Se isso não funcionou, contacte-nos através do link na parte superior.
- Baixe o IDE Arduino. arduino.cc
- Abra o código.
- Para instalar bibliotecas, consulte este tutorial.
- O elevador deve passar por seu autoteste. Todos os botões de chamada devem acender em sequência, em seguida, os cinco botões no elevador, a exibição de sete segmentos deve alternar e a matriz deve mostrar as setas para cima e para baixo. Depois de concluído, o display de 7 segmentos mostrará o último número de andar conhecido da cabina do elevador.
Testando / Calibrando
Como o motor de passo precisa saber exatamente onde parar em cada andar, você precisa dizer isso manualmente - uma vez. Ele se lembrará disso na memória não volátil (o que significa que o salvará mesmo quando a alimentação for desconectada).
Para calibrar:
- Pressione e segure os botões superior e inferior no painel direito. A matriz deve mostrar um C (para calibrar).
- Use os botões superior e inferior para mover manualmente o carro até o andar mostrado no segmento sete. Quando estiver no lugar certo, pressione o botão do meio.
- Repita a etapa 2 para todos os cinco andares. Quando terminar, a matriz deve ser desligada.
Próximas etapas
Projetos como esse nunca são realmente concluídos! Gostaríamos de reconstruir a estrutura do elevador e poço com peças cortadas a laser. Usamos uma serra de vaivém portátil para fazer isso e, portanto, nossos cortes não são realmente tão retos ... isso é parcialmente o que está causando nosso “problema de fricção”. Ao mesmo tempo, projetaríamos um suporte de motor melhor e obteríamos um motor melhor e mais rápido.
Eletronicamente, recebemos um pedido para adicionar uma campainha ou carrilhão para cada vez que a porta do elevador está se abrindo, como muitos elevadores reais fazem. Faremos isso também.
Qualquer opinião ou sugestão sobre este projeto, por favor nos avise nos comentários!
Histórico da versão
Observação:o link do Google Drive será atualizado automaticamente com cada versão.
Versão 2:corrigimos o bug em que chamar o elevador de fora no andar atual pode fazer o software travar, exigindo que você pressione o botão de reset.
Código
Biblioteca de matrizes de LED do Arduino
https://github.com/shaai/Arduino_LED_matrix_sketchhttps://github.com/shaai/Arduino_LED_matrix_sketchBiblioteca SevenSeg
https://github.com/sigvaldm/SevenSeghttps://github.com/sigvaldm/SevenSegArduino Sketch
Processo de manufatura