


Automatizando seus processos por meio da coleta de lixo - Aqui está o que procurar
Por quê leia isto: A coleta de lixo tem sido um dos processos mais desafiadores em automação há anos. Embora a tecnologia possa otimizar sua produção de várias maneiras, algumas tarefas ainda podem ser muito complexas para serem executadas. Este artigo mostra os processos que podem ser automatizados por meio da coleta de lixo, os desafios potenciais e suas soluções.
O que é coleta de lixo?
O objetivo da coleta de lixo é pegar objetos semelhantes que são colocados aleatoriamente e orientados de um recipiente, usando um sistema de visão, um robô e uma pinça. O sistema de visão normalmente executa uma varredura 3D do objeto dando sua nuvem de pontos (conjunto de pontos no espaço que constituem um objeto) e, assim, reconhecendo-o.
Em seguida, o robô é conduzido para a caixa, pega o objeto, sai da caixa e para o alvo de colocação, normalmente uma caixa ou algum outro acessório.
Desafios e soluções para a parte robótica do processo de coleta de lixo
Alguns itens serão difíceis de alcançar
Um grande problema com a coleta de lixo é a incapacidade do robô de coletar todas as peças do lixo. Pegar de 80 a 85 por cento deles é gerenciável, pois o sistema de visão irá comandar o robô para pegar os objetos que são fáceis de agarrar (por exemplo, aqueles que estão sentados em cima).
A parte difícil é conseguir pegar os últimos itens que estão entrelaçados ou ficam em um canto da lixeira. Isso pode ser resolvido de duas maneiras. O primeiro implica redesenhar o caixote, dando-lhe uma forma mais prática. Por exemplo, uma forma cônica manteria todas as peças no meio o tempo todo.
Uma segunda solução seria sacudir a lixeira (por exemplo, usando um motor automaticamente) para que as posições e orientações das peças sejam reorganizadas e não mais misturadas. A câmera então os identificaria mais facilmente.
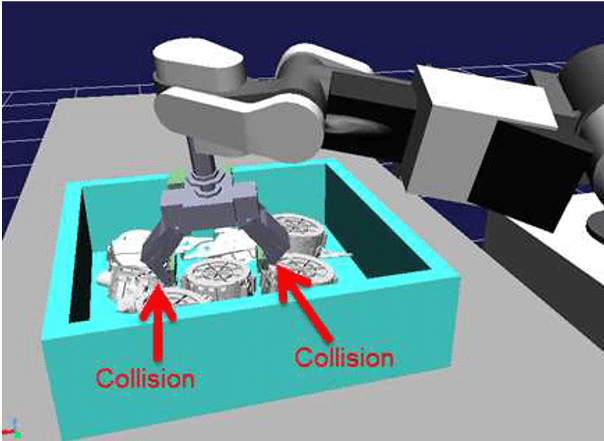
Garras podem danificar os itens coletados
Outro problema é a chance de colisão da garra com o resto dos objetos ao tentar pegar um. A estratégia de colheita deve ser precisa para evitar danificar as peças restantes (especialmente as frágeis).
Uma solução para isso é um algoritmo de planejamento de caminho preciso com prevenção de obstáculos. O planejamento de caminho em robótica é o processo de encontrar o caminho contínuo ideal do ponto A ao ponto B. Se a evasão de obstáculos também for incluída, a mesma tarefa será realizada sem bater em nenhum obstáculo.
Pode haver casos em que os objetos na lixeira são de formas ou naturezas diferentes (por exemplo, maçãs e laranjas). Neste caso, uma pinça macia ou uma pinça a vácuo com ventosas pode ser usada para se adaptar a qualquer tamanho e formato.

Desafios e soluções para a visão do processo de coleta de lixo
O sistema de visão de uma solução de coleta de lixo pode incluir câmeras 2D ou 3D. Nem é preciso dizer que as câmeras 3D (câmeras duplas que criam uma imagem 3D) são mais caras, mas são mais eficazes. Além disso, podem ser usados scanners a laser 3D que produzem as nuvens de pontos acima mencionadas.
Raios, oclusão e detecção de bordas podem complicar o processo
Problemas recorrentes na visão incluem iluminação, oclusão e detecção de bordas. Eles se aplicam a sistemas de visão 2D e 3D.
Iluminação significa que as sombras são projetadas de cada objeto para o resto, então a câmera tem dificuldade em detectá-las. Isso pode ser resolvido fornecendo iluminação adicional à cena, que pode ser fixada ao lado da câmera ou no pulso do robô.
Oclusão ocorre quando o objeto não está totalmente visível para a câmera quando outro objeto é colocado em cima dele. Novamente, sacudir a lixeira pode ser útil neste caso, para que o objeto possa ser detectado com mais facilidade. Ser detectado com mais facilidade.
Detecção de borda é o desafio de descobrir o perímetro do contorno (bordas) de um objeto. Fica ainda mais difícil quando um grande número de objetos são colocados próximos uns dos outros, como na coleta de lixo. A solução para esse problema depende do software e dos métodos usados.
Como identificar o potencial para automatizar seus processos por meio da coleta de lixo
Se você considerar a automação de processos em sua empresa usando a coleta de lixo, os seguintes pontos podem sugerir algum potencial para automação:
- Grande número de peças pequenas: Se o sistema estiver configurado corretamente, o robô pode pegar essas peças (como parafusos ou arruelas) de forma rápida e robusta.
- Itens não ordenados: Processos em que não é possível receber itens em ordem de um processo ou subfornecedor anterior. Na maioria dos casos, será mais eficaz solicitar que os itens sejam entregues de forma estruturada e, assim, evitar completamente a coleta de lixo.
- Peças com superfície fosca. Se as peças forem altamente reflexivas, como peças de metal usinadas, pode haver desafios com raios. A maioria dos sistemas de câmera terá dificuldade em encontrar os itens para coleta de lixo.
- Um processo em que o tempo de ciclo é superior a aproximadamente 10 segundos , e de preferência com um tampão para as peças colhidas. O sistema de coleta de lixo levará algum tempo para encontrar e escolher cada item.
Conclusão
Para os desenvolvedores, a coleta de lixo é realmente o Santo Graal. Para os clientes, pode não ser assim. Normalmente, pode ser uma boa ideia tentar evitar o uso de soluções de coleta de lixo, simplesmente garantindo que o formato de entrega dos itens seja ordenado, em vez de aleatório em uma caixa.
Isso geralmente adiciona um pouco de custo, mas geralmente é mais barato e permite um processamento mais rápido do que usar a coleta de lixo.
No entanto, em alguns casos, isso não é possível ou muito caro. Nesses casos, é ótimo poder usar a coleta de lixo.
Se um processo seu marcar todos os quatro pontos anteriores, ele pode ser muito adequado para coleta de lixo. Ao encontrar a solução a utilizar, tenha em atenção que algumas soluções ainda são muito experimentais, enquanto outras tiveram vários anos para amadurecer e comprovar a sua robustez.
Os robôs poderiam combater crises como a Covid-19?
Chave de fenda automatizada:os prós e os contras - e como identificar o potencial de automação em sua própria produção
Robô industrial
- O que você deve procurar em uma célula de trabalho robótica pré-projetada
- O que procurar em um parceiro de fabricação de uretano
- O que é certo para sua carga? Motor CA vs. Motor CC
- O que procurar em uma empresa de reparo de equipamentos de construção
- O que procurar em um fabricante de PCB:Parte 2
- O que procurar em uma prensa dobradeira usada
- O que procurar ao comprar um ferreiro
- O que procurar em um parceiro de equipamentos de fabricação
- O que procurar em um corretor de máquinas
- O que procurar em um fornecedor de metal