


Superando os desafios do link da câmera automotiva
Sistemas de câmera e tecnologias de link de câmera estão sendo implantados em uma gama cada vez maior de aplicações em veículos para auxiliar os motoristas e aumentar a experiência de direção. Os sistemas tradicionais de câmera traseira (RVC) com uma única câmera estão sendo substituídos por sistemas de visão surround (SVS) com quatro ou mais câmeras que fornecem uma perspectiva de 360 ° do veículo. Gravadores de direção, monitoramento de ponto cego, visão noturna, reconhecimento de sinais de trânsito, monitores de saída de faixa, controle de cruzeiro adaptativo, frenagem de emergência e sistemas de prevenção de colisão em baixa velocidade ajudam a aliviar a carga do motorista. Para aumentar a experiência de direção, as câmeras também estão sendo introduzidas para aplicações tão diversas como monitoramento de sinais vitais do motorista, detecção de ocupantes e reconhecimento de gestos para interface homem-máquina (HMI). Os desenvolvimentos nos sistemas de câmeras estão permitindo até que os fabricantes automotivos reimaginem a silhueta do veículo por meio da substituição de recursos tradicionais, como espelhos retrovisores.
clique para ampliar a imagem
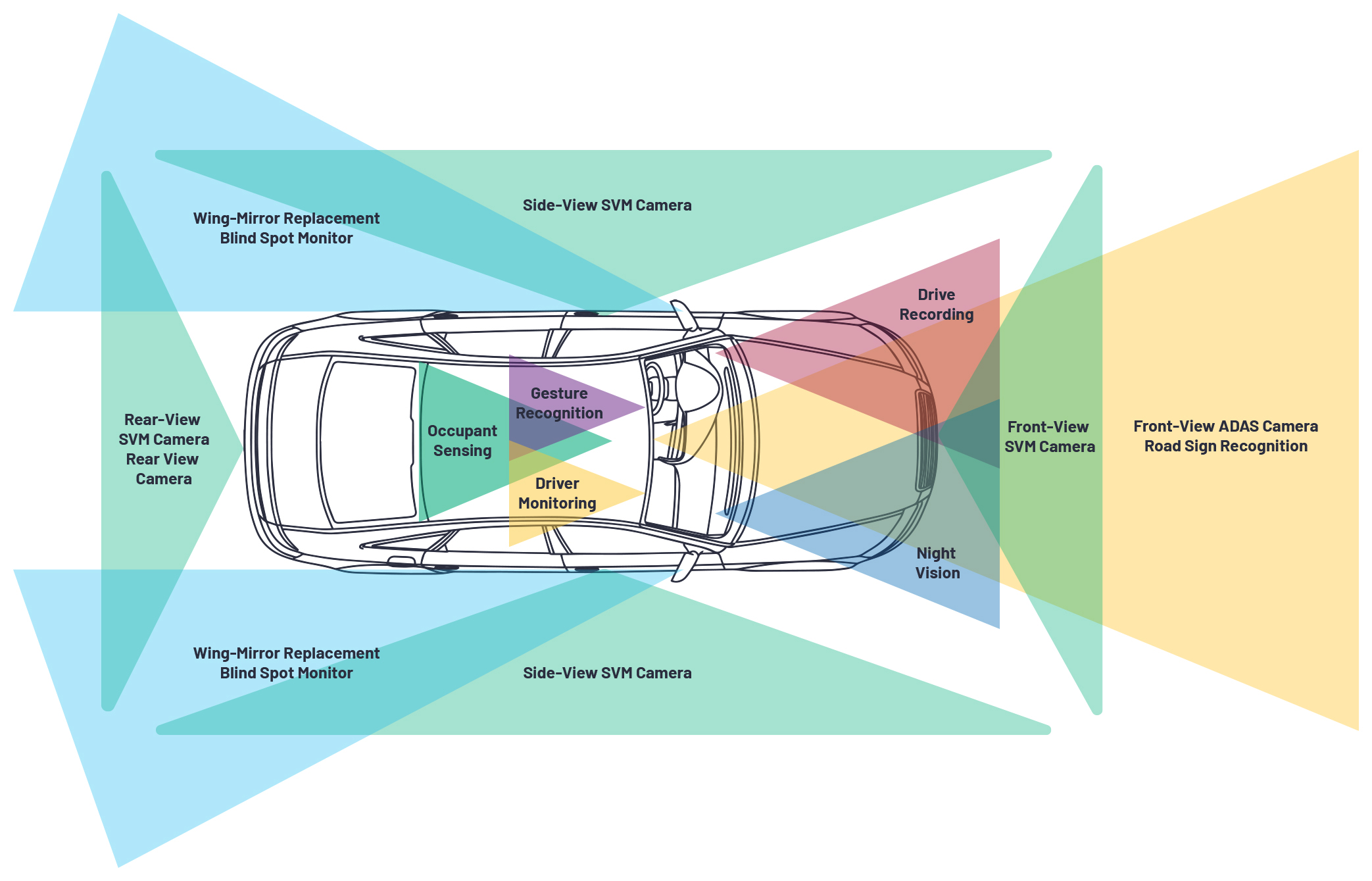
Figura 1. Proliferação de câmeras em veículos modernos. (Fonte:Dispositivos analógicos)
Muitas das diversas aplicações de câmeras listadas compartilham uma gênese nos sistemas RVC de definição padrão (SD) ainda presentes em muitos dos veículos de hoje. Os sistemas de câmeras SD têm sido rotineiramente implantados em aplicações automotivas há mais de uma década, proliferando de veículos premium para a linha mais ampla de veículos em resposta aos requisitos legislativos e às expectativas dos clientes. Os sistemas de vídeo SD ofereceram aos OEMs automotivos muitos benefícios valiosos:baixo risco devido à maturidade de uma tecnologia comprovada na indústria de televisão de consumo ao longo de muitos anos, baixas demandas de largura de banda resultando na capacidade de usar cabos e conectores baratos enquanto mantém as emissões controladas, e uma linha madura de codificadores e decodificadores de vídeo com manuseio comprovado para entradas de vídeo potencialmente instáveis.
Hoje, a onipresença de telas de definição ultra-alta (UHD) em dispositivos de consumo está levando à necessidade de telas maiores e de alta definição em todos os tipos de veículos. Embora o vídeo SD possa parecer satisfatório em uma tela menor, os consumidores de hoje podem facilmente perceber suas deficiências em uma tela maior (por exemplo, a falta de detalhes de alta frequência causada pela largura de banda limitada do vídeo SD ou artefatos de cores cruzadas introduzidos ao separar a luminância e sinais de crominância um do outro no sinal modulado). A tendência para telas maiores resultou em OEMs automotivos sendo desafiados a atualizar o resto de suas arquiteturas de câmera para alta definição. Um elemento fundamental envolvido na abordagem desse desafio é a tecnologia de link de câmera selecionada para transferir dados de imagem da câmera para a unidade receptora (por exemplo, ECU ou monitor).
A primeira característica de caso de uso ao selecionar uma nova tecnologia de link de câmera para um aplicativo é a largura de banda necessária. Os sistemas de câmeras variam amplamente em termos de requisitos de largura de banda. Os sistemas RVC tradicionais que usam resoluções de vídeo SD requerem larguras de banda baixas (por exemplo, 6 MHz). Os sistemas SVM, normalmente empregados em velocidades baixas, usam taxas de atualização baixas (por exemplo, 30 Hz) para maximizar a exposição, o que pode limitar a largura de banda necessária. Os sistemas de substituição de retrovisores laterais, que operam em toda a gama de velocidades de operação de um veículo, usam taxas de atualização mais altas (por exemplo, 60 Hz ou mais) para minimizar a latência, o que exige maior largura de banda. As câmeras frontais para aplicações de direção autônoma exigem resoluções ultra-altas (por exemplo, 18+ MPixel) e, portanto, têm requisitos de largura de banda muito altos. Muitas tecnologias de link de câmera existem para fornecer uma ampla gama de recursos de largura de banda - sua seleção é influenciada por, e pode influenciar, vários aspectos do sistema de câmera e do veículo em geral.
Qualidade de imagem
A qualidade da imagem que uma tecnologia de link de câmera permite é um fator crítico no projeto de arquitetura. O envio de dados de vídeo por meio de uma tecnologia de link de câmera que não fornece largura de banda suficiente pode resultar na perda de integridade da imagem ou perda total da imagem. A degradação da imagem causada pela tecnologia de link de câmera pode ser avaliada medindo fatores como nitidez da imagem e faixa dinâmica.
Atributos do cabo
O conjunto completo de cabos ou chicotes elétricos de um veículo moderno é um de seus componentes mais complexos, pesados e difíceis de instalar. Com um carro médio apresentando bem mais de um quilômetro de fiação, o chicote exige considerações sérias. Em um primeiro momento, os aplicativos com requisitos de largura de banda mais elevados (por exemplo, câmeras frontais de resolução ultra-alta para veículos autônomos) requerem cabos pesados de alta qualidade. O peso do cabo surgiu como um tópico de maior escrutínio nos últimos anos devido ao foco em tornar os carros mais leves e mais eficientes em um esforço para aumentar o alcance dos veículos com motor de combustão e elétricos. Para aplicações que envolvem roteamento complexo através de um veículo, o raio de curvatura suportado por um cabo pode ser importante. Para aplicações em que a câmera está localizada em uma parte articulada do corpo (por exemplo, a porta para sistemas SVM ou a tampa do porta-malas para sistemas RVC e SVM), a robustez do cabo para abrir e fechar os ciclos é crítica. Para aplicações onde o cabo pode ser exposto a ambientes agressivos, pode ser necessária resistência à água.
Independentemente da tecnologia de link de câmera e tipo de cabo selecionado, cada centímetro de cabo tem um custo e, quando todos os custos do chicote são agrupados, pode resultar no chicote sendo um dos três elementos mais caros do veículo.
Os sistemas de vídeo SD tradicionais, devido às suas demandas de baixa largura de banda, facilitam o uso de cabos leves e extremamente econômicos. Em muitos casos, cabos de par trançado não blindado (UTP), semelhantes aos normalmente usados para links de controle de baixa velocidade, como CAN, são usados para vídeo SD.
Conectores
Outro elemento crucial do chicote elétrico e seus módulos conectados são os conectores elétricos. Além de conectar o chicote a módulos de controle, sensores ou motores, os conectores também são usados para unir diferentes seções do mesmo cabo dentro do chicote (conectores em linha). Os conectores em linha são amplamente usados na indústria automotiva para simplificar a construção, instalação e manutenção do chicote. Por exemplo, usar um conector em linha muito próximo a uma câmera significa que, se a câmera estiver danificada, ela pode ser substituída sem perturbação significativa para o resto do chicote elétrico do veículo.
A seleção do conector, em comum com a seleção do cabo descrita acima, pode ser um determinante significativo do custo geral de um sistema de câmera. Os sistemas de alta resolução geralmente exigem conectores que suportem larguras de banda maiores e, portanto, são mais caros.
Outras considerações sobre o conector incluem a pegada do conector na PCB e na superfície da ECU, se o conector deve ser selado ou não lacrado e se a codificação de cores / codificação é necessária.
Os sistemas de vídeo SD tradicionais facilitam o uso de conectores econômicos na câmera e na ECU ou unidade principal (HU). Por exemplo, os sinais de vídeo de um sistema RVC de vídeo SD são freqüentemente roteados para a ECU ou HU com outros sinais (por exemplo, redes de controle e os sinais de fonte de alimentação necessários) em um conector multipin; um link digital normalmente requer conectores dedicados, que introduzem PCB e restrições de embalagem em uma ECU.
Arquitetura do Veículo
A arquitetura do veículo envolvido pode ter várias influências na seleção da tecnologia de link de câmera adequada. Os comprimentos dos cabos em veículos padrão podem frequentemente chegar a vários metros de comprimento e, com a tendência dos consumidores para veículos utilitários esportivos maiores, os comprimentos dos cabos estão aumentando. Algumas arquiteturas de veículos têm recursos adicionais que podem representar novos desafios de comprimento de cabo, como assistência reversa de reboque para apoiar a reversão e manobra de reboques.
Os veículos comerciais são outro desafio de arquitetura em que os sistemas de câmeras esticam os cabos até seu comprimento máximo. A maioria das tecnologias de link de câmera pode oferecer suporte a qualquer uma dessas arquiteturas e recursos de veículos, mas algumas podem exigir módulos adicionais, como repetidores ou retransmissores, para suportar cabos longos.
EMC
As emissões eletromagnéticas e a robustez da imunidade do cabo é outro fator crítico no processo de seleção da tecnologia de link de câmera, pois o cabo pode se tornar uma antena dentro do veículo com resultados prejudiciais. A proliferação de sistemas elétricos e eletrônicos no veículo resultou em uma dependência crescente de tais sistemas existindo juntos de forma compatível. Não é aceitável que um sistema (por exemplo, um sistema RVC) influencie ou seja influenciado por outro sistema (por exemplo, um motor de tração de veículo elétrico ou mecanismo de assento elétrico), quando ambos estiverem habilitados. Para tanto, é fundamental que as tecnologias de link sejam consideradas quanto ao desempenho de suas emissões e imunidade antes da seleção.
Para garantir que agressores internos ou externos não interfiram nos sistemas do veículo, os fabricantes automotivos testarão todos os sistemas de acordo com seus padrões de EMC específicos. Esses testes são feitos primeiro em um nível de sistema (por exemplo, uma câmera de visualização traseira ou sistema de visualização surround). Esse teste é caro, demorado e desafiador, mas garante que cada módulo tenha um alto nível de robustez antes de ser integrado ao veículo. Uma vez que o teste de nível de sistema foi concluído com sucesso, o fabricante automotivo também deve verificar a operação e o desempenho do sistema no veículo, testando a capacidade do sistema de operar ao ser bombardeado por sinais irradiados de alta potência (imunidade irradiada). O fabricante também medirá as bandas de recepção de todas as antenas do veículo (por exemplo, FM, GPS, celular, Wi-Fi, etc.) para garantir que nenhum sinal de interferência esteja presente. Resolver problemas de EMC no nível do veículo pode ser caro e demorado.
Outros requisitos
Além dos requisitos já descritos, uma miríade de outras demandas orienta a seleção de uma tecnologia de link de câmera, como disponibilidade de canal de controle, precisão de pixel e classificações ASIL.
Seleção de uma tecnologia de link de câmera
A seleção de uma tecnologia de link de câmera ao projetar um sistema de câmera é influenciada por uma infinidade de fatores. A seleção de uma tecnologia de link de câmera também influencia vários aspectos do veículo ao qual está integrada. Os sistemas RVC tradicionais, desenvolvidos com base em tecnologias de vídeo SD, ofereceram aos OEMs automotivos um método extremamente confiável e econômico para a transferência de vídeo dentro do veículo. Nos últimos anos, no entanto, surgiram tendências de consumo para tornar os sistemas de vídeo SD cada vez menos aceitáveis em monitores maiores. Desenvolvimentos legislativos e expectativas dos consumidores também se combinaram para continuar aumentando o número de câmeras em cada novo veículo.
Essas tendências e desenvolvimentos servem como pano de fundo para o surgimento de várias tecnologias de link de câmera que são usadas nos veículos de hoje em todo o espectro de sistemas de câmeras automotivas. As tecnologias de link de câmera hoje ainda variam de tecnologias de vídeo SD (por exemplo, CVBS) comprovadas em sistemas SD RVC tradicionais, por meio de tecnologias de link analógico de alta definição, até tecnologias de link digital de alta definição.
As tecnologias de vídeo SD só podem habilitar aplicativos de baixa largura de banda, mas, por outro lado, exigem cabos e conectores de baixo custo. As tecnologias de link digital permitem aplicativos de alta largura de banda e oferecem benefícios como precisão de pixel, mas normalmente requerem cabos e conectores mais caros. Tecnologias de link analógico de alta definição, como o barramento da câmera do carro (C
2
B) oferecer um meio-termo entre as duas abordagens mencionadas - entregando vídeo de alta definição compatível com EMC em cabos e conectores econômicos.
Tecnologia de link de câmera analógica de alta definição
Uma vantagem de usar uma tecnologia de transmissão de vídeo analógico de alta definição C
2
B é que eles foram projetados desde o início para uso como um link de câmera automotiva. C
2
B suporta vídeo HD em cabos de par trançado não blindado (UTP) e conectores não blindados. Isso possibilita a atualização de câmeras SD para HD sem a necessidade de alterar a infraestrutura de cabos e conectores existente.
C
2
B suporta a transferência de vídeo HD do transmissor para o receptor em resoluções de até 2 MPixel (1920 × 1080). Ele é projetado para utilizar a capacidade máxima de largura de banda dos cabos e conectores UTP tradicionalmente empregados para sistemas de vídeo SD e permite o uso de comprimentos de cabo de até 30 m sem retransmissão. Para garantir que C
2
B atende a todos os requisitos automotivos, ele utiliza recursos de várias otimizações para EMC, incluindo construção de sinal otimizada, filtros anti-serrilhamento e filtros de modelagem de espectro.
C
2
B apresenta um canal de controle que pode lidar com a transmissão de sinais I2C em até 400 kHz, até quatro sinais GPIO e sinais de interrupção do módulo da câmera. Isso facilita arquiteturas de sistema, incluindo não apenas a configuração local compreendendo uma unidade de microcontrolador (MCU) no módulo da câmera e um MCU na ECU / HU, mas também a configuração remota usando um MCU na ECU / HU configurando o módulo da câmera. Os quatro GPIOs são usados para transferir sinais estáticos através do C
2
Piscar. Dois sinais de interrupção são fornecidos para permitir o C
2
O transmissor B comunica informações de status ao C
2
Receptor B. C
2
B aplica a verificação CRC aos dados do canal de controle e pode iniciar automaticamente a retransmissão caso ocorra um problema.
clique para ampliar a imagem
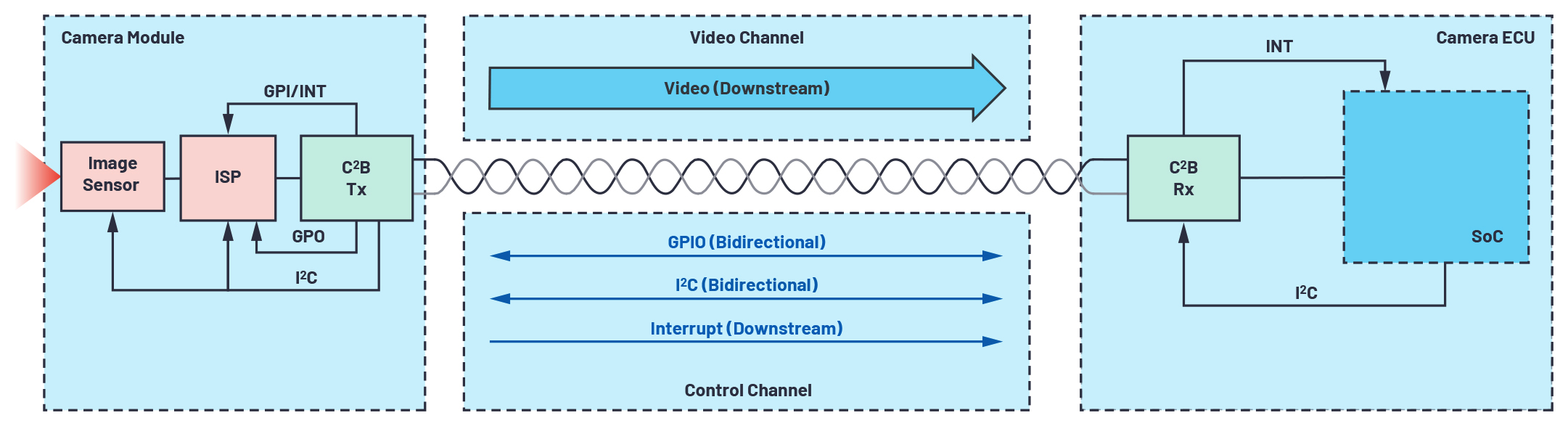
Figura 2. C
2
Visão geral da arquitetura B. (Fonte:Dispositivos analógicos)
C
2
B oferece suporte a recursos de agregação de valor para clientes automotivos, como diagnóstico de cabos (coleta de informações sobre a ocorrência de eventos de curto para a bateria e para o solo) e coleta, geração, decodificação e transmissão de contagem de quadros para fornecer uma visão sobre a integridade do dados transmitidos.
Definido e projetado para aplicações automotivas, C
2
B emprega vários blocos para garantir a conformidade EMC em cabos UTP de baixo custo e conectores não blindados de baixo custo. Isso inclui cancelamento de eco para incompatibilidade de impedância, rejeição de modo comum de banda larga (importante ao usar cabos UTP) e modelagem de espectro do sinal de saída para fornecer emissões reduzidas. C
2
B é testado e está em conformidade com os padrões internacionais de EMC de nível de dispositivo e padrões internacionais de EMC de nível de sistema (CISPR 25 classe 5 [emissões], ISO 11452-2 / ISO 11452-4 / ISO 11452-9, ISO 7637-3 [imunidade] , ISO 10605 [ESD]).
Esses recursos tornam C
2
B uma solução atraente para dois tipos de fabricante automotivo:aqueles que ainda usam soluções de câmeras SD e buscam um caminho de atualização de baixo risco e aqueles que já mudaram para soluções de câmeras baseadas na tecnologia de link digital e buscam um caminho de redução de custos uma tecnologia de link analógico de alta definição.
Espaços de aplicativos em que C
2
B oferece vantagens de custo de sistema significativas em relação às tecnologias alternativas, incluindo câmeras de visão traseira, sistemas de câmera de visão surround, e-espelho e sistemas de monitoramento de ocupante. A natureza sem perdas visualmente validada de forma independente de C
2
B pode fornecer um desempenho de alta definição semelhante às tecnologias de link digital, ao mesmo tempo que oferece economias de custo significativas no nível do sistema.
clique para ampliar a imagem
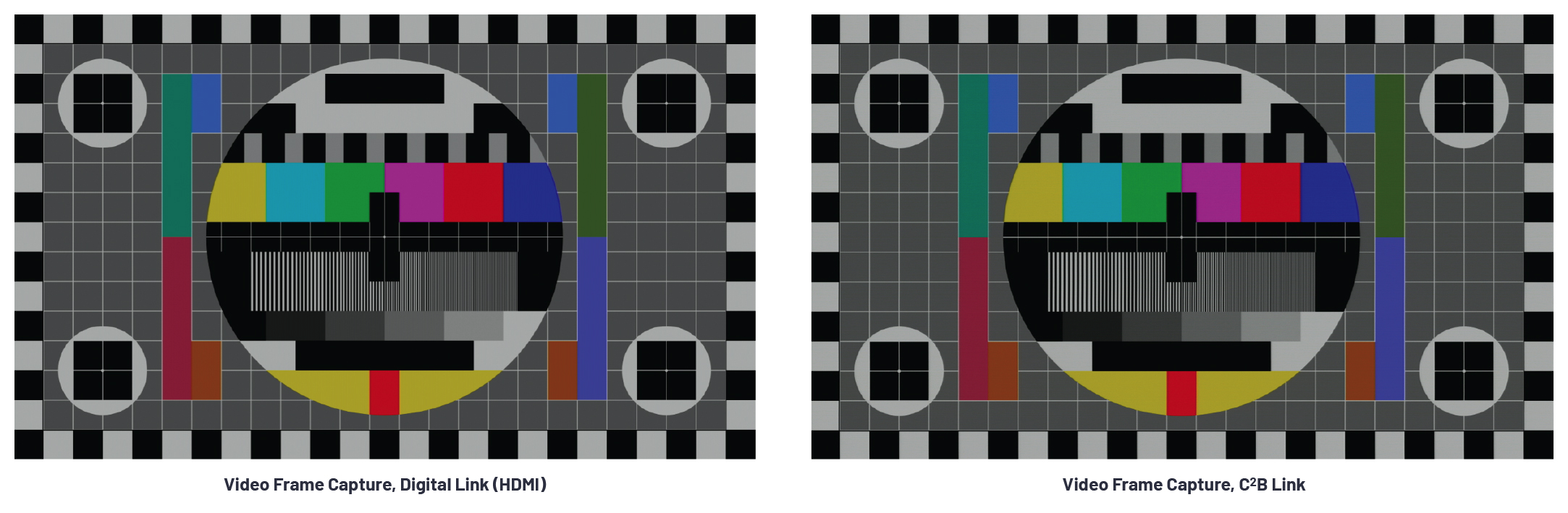
Figura 3. Comparação de capturas de quadro de vídeo para um link digital e um C
2
Piscar. (Fonte:Dispositivos analógicos)
clique para ampliar a imagem
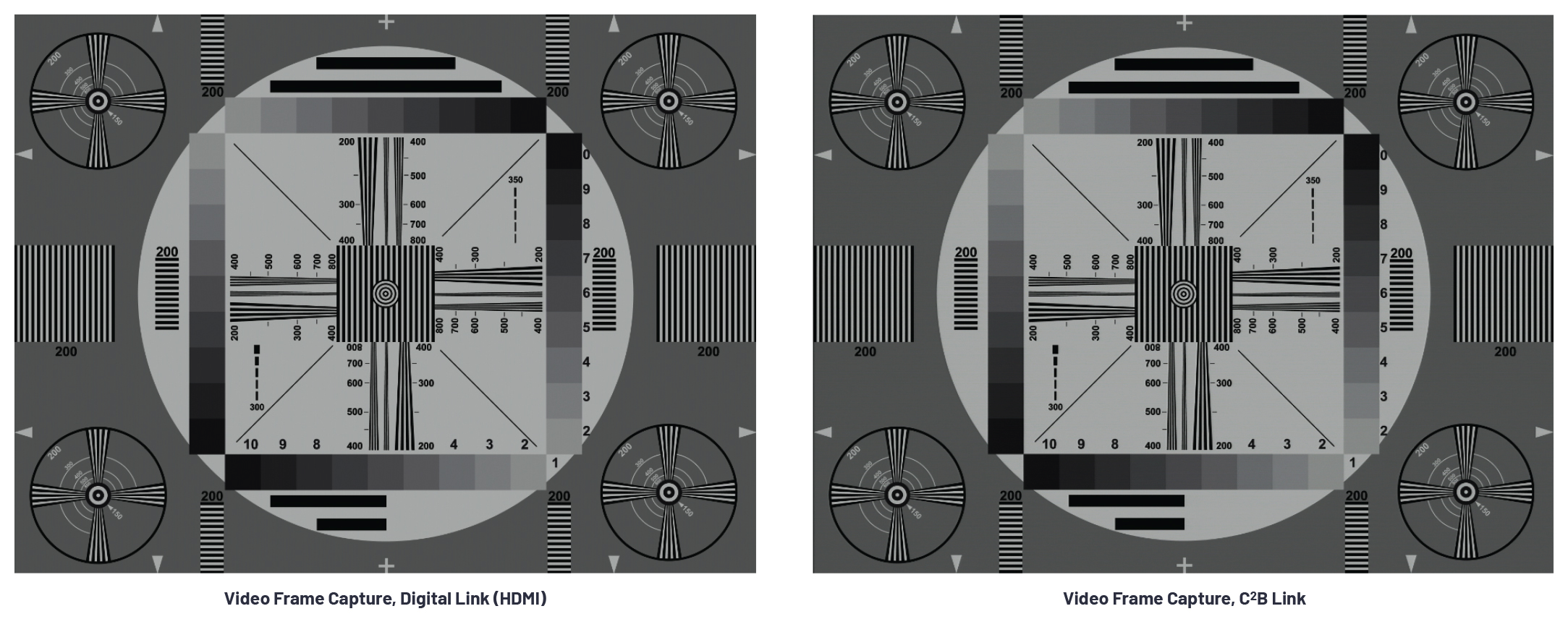
Figura 4. Comparação de capturas de quadro de vídeo para um link digital vs. C
2
Piscar. (Fonte:Dispositivos analógicos)
C
2
B permite que os fabricantes automotivos atualizem as câmeras SD existentes para HD ou facilita a migração de um sistema usando uma tecnologia de link digital para reduzir o custo do sistema. Com placas de avaliação para C
2
Transmissor B (ADV7992) e C
2
Receptor B (ADV7382 / ADV7383), como os disponíveis na Analog Devices, os OEMs podem acelerar a investigação de tecnologia e a prototipagem do sistema. Durante a prototipagem do sistema, o C
2
A placa de avaliação do transmissor B pode ser usada como C
2
Fonte B se estiver desenvolvendo um receptor, enquanto o C
2
A placa de avaliação do receptor B pode ser usada como C
2
B afundar se estiver revelando uma câmera.
Integrado
- Cibernético e a nuvem:Superando os principais desafios de segurança em meio ao aumento de várias nuvens
- Big Data, Não Big Easy:Superando Novos Desafios na Tecnologia de Manutenção de Fábrica
- Sensor Hall visa sistemas automotivos essenciais para a segurança
- Superar desafios de defeitos de chips no desenvolvimento de produtos automotivos
- Sistemas avançados de assistência ao motorista:interrompendo o cenário global de segurança automotiva
- Superar desafios comuns no corte e retificação de alumínio
- Superando os principais desafios técnicos na metalurgia
- Superando os desafios de desenvolvimento de IoT
- Desafios de fabricação automotiva e soluções de IoT
- Superando os desafios do Covid-19 com fábricas inteligentes