


Tecnologia de câmera de contagem de fótons de megapixels
Imagine uma câmera projetada para capturar imagens com resolução de um único fóton a 24.000 quadros por segundo. Graças a um obturador eletrônico que pode ficar aberto por apenas 3,8 ns e que pode ser sincronizado com pulsos de laser rápidos com duração de apenas alguns picossegundos, pode-se literalmente ver a luz se propagando pelo espaço. Com essa capacidade, novos aplicativos se abrem, como visão quântica, imagem fantasma, imagem de ruído sub-tiro, LiDAR quântico e destilação quântica, para citar alguns.
Comum a essas aplicações é a necessidade de detecção de fóton único e alta resolução de tempo com baixo ruído e alta sensibilidade. Essa nova câmera é capaz de tudo isso, mas, além disso, faz isso em um milhão de pixels simultaneamente, permitindo uma velocidade considerável na captura e, possivelmente, na reconstrução. No núcleo desses pixels há um diodo de avalanche de fóton único (SPAD) que realiza a detecção de fótons, gerando um pulso digital. Este pulso pode ser contado ou marcado com data e hora, dando assim a contagem de fótons e o caráter de resolução temporal da câmera.
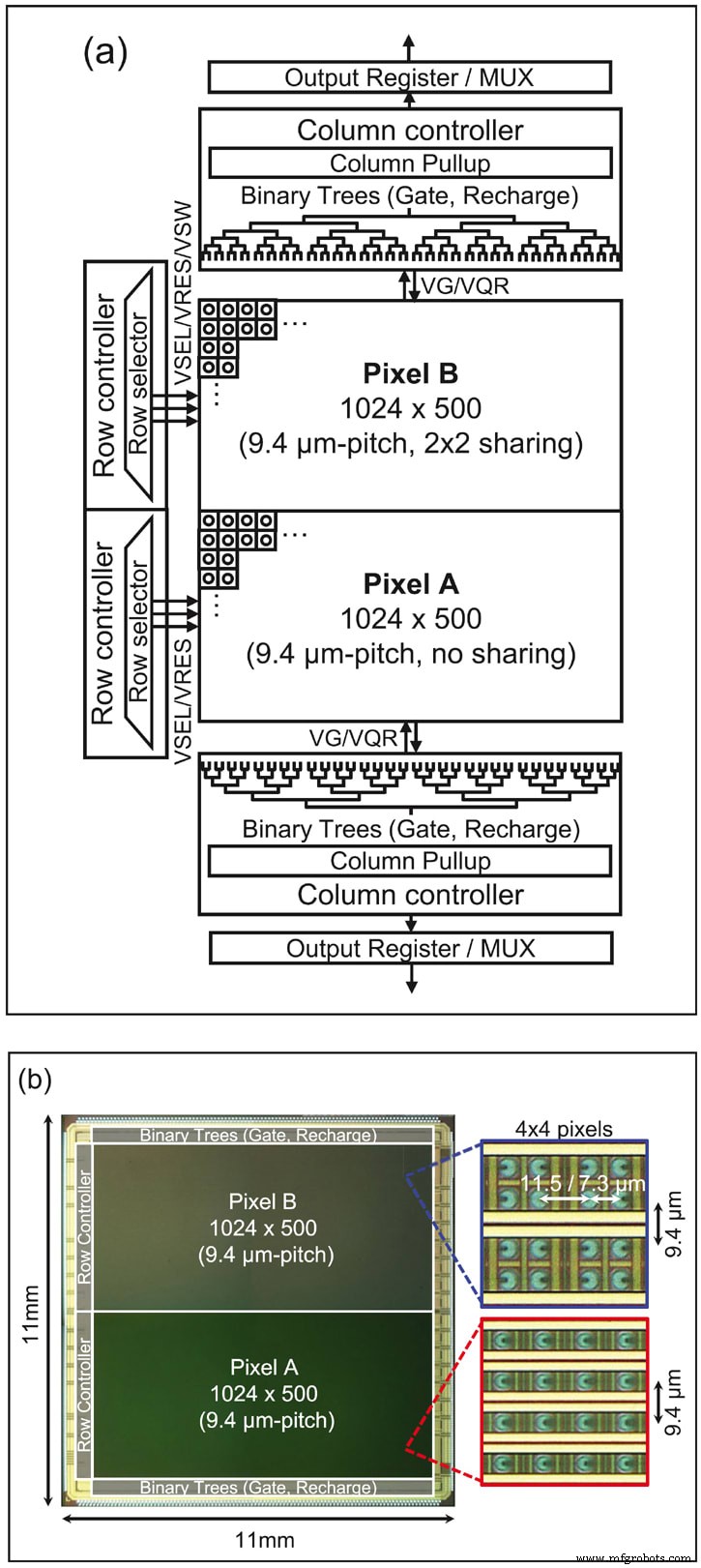
Em um artigo publicado na revista Optica, apresentamos a primeira câmera de 1 Mpixel baseada nos pixels SPAD. Os pixels têm um passo de 9,4 μm, com uma arquitetura de 7T (7 transistores por pixel) ou 5,75T. A micrografia do chip da câmera é mostrada na Figura 1(b). O diagrama de blocos da câmera é mostrado na Figura 1(a); compreende uma árvore binária dupla para controlar o obturador com uma precisão de cerca de 100ps e uma posição ajustável em passos de 36ps. Isso permite reconstruir imagens 3D medindo o tempo de voo de um pulso de luz à medida que sai do laser e é refletido por um objeto. Também permite capturar luz em voo, expondo assim interessantes efeitos relativísticos em laboratório.
O chip foi testado como um sensor de imagem de intensidade com um gráfico padrão (Figura 2(a)) em até 14 bits no nível de pixel. As Figuras 3(a) e (b) mostram imagens 2D e 3D codificadas por cores obtidas pela iluminação de uma cena com um laser de 637 nm pulsado a 40 MHz e capturado no sensor de imagem de meia resolução. A janela do portão com seu comprimento de 3,8 ns é deslocada de 0,6 ns para 13,2 ns por etapas de 36 ps para adquirir perfis completos de intensidade de fótons em função da posição do portão.

A distância LSB nesta medida corresponde a 5,4 mm. A informação de profundidade é reconstruída detectando a posição da borda ascendente do perfil de intensidade suavizada para cada pixel, correspondendo ao tempo de chegada do pulso de laser refletido. A inclinação de temporização da porta sobre a matriz é compensada subtraindo a distribuição de inclinação de temporização medida independentemente da distribuição de tempo de chegada medida. Na Figura 3(b), a cor vermelha denota maior proximidade com a câmera SPAD, enquanto a cor azul corresponde a maior distância. A faixa de profundidade máxima para esta medição foi definida para 2m, mas pode ser estendida para dezenas de metros diminuindo a frequência de repetição do laser e aumentando o passo da porta.
O passo de varredura do portão fino e a longa exposição são usados para obter alta precisão de profundidade, e o tempo de aquisição de dados resultante para essa medição foi de algumas dezenas de segundos. Isso é consideravelmente mais longo do que o de outros métodos de alcance, como o tempo de voo indireto, mas pode ser facilmente reduzido aumentando o passo de varredura do portão, reduzindo o alcance de varredura e aumentando a potência do laser para reduzir o tempo de exposição. Além disso, espera-se uma melhoria adicional com a implementação de uma microlente no chip para aumentar a sensibilidade.
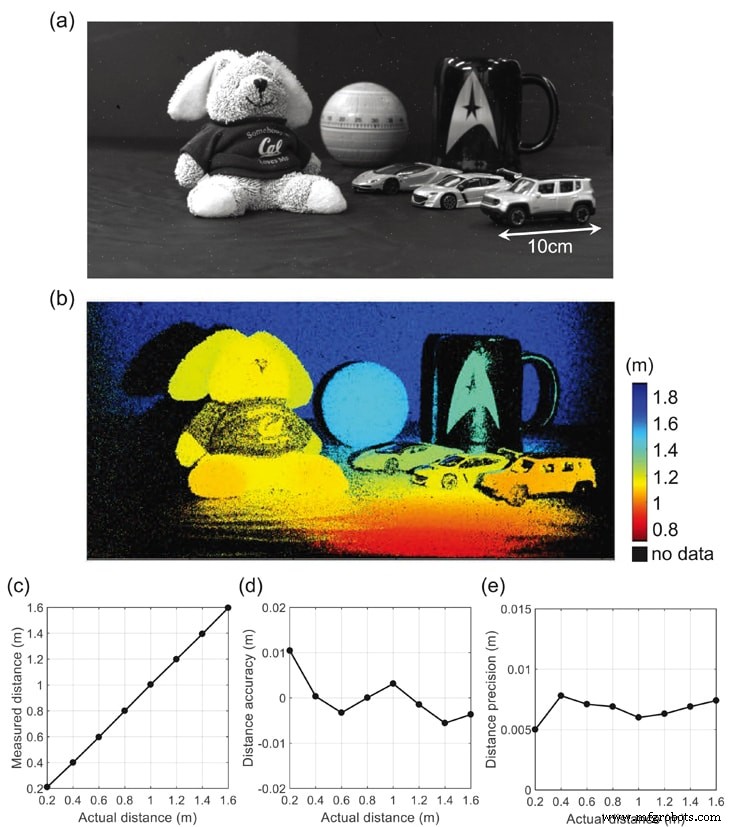
A Figura 3(c) mostra a distância medida em função da distância real do objeto. Na Figura 3(c), (d) e (e), um objeto plano coberto com papel branco (refletância em torno de 60%) é usado para avaliar a distância medida, acurácia e precisão. Na Figura 3(c), a distância medida é extraída tomando a média da distância de pixel único sobre 20×20 pixels no centro da matriz. Uma concordância muito boa com a distância real é observada dentro da faixa medida de 0,2 a 1,6 m. Na Figura 3(d), a precisão da distância é calculada como a distância média medida subtraída da distância real. Para a faixa de distância medida, a precisão é sempre melhor que 1 cm. Na Figura 3(e), a precisão da distância é explorada como um desvio padrão da distância de pixel único acima de 20×20 pixels no centro da matriz. A precisão é melhor que 7,8 mm (rms) para todos os pontos medidos até 1,6 m.
A detecção de múltiplos objetos foi demonstrada experimentalmente tanto pela codificação de iluminação temporal quanto por padrões de exposição, o que envolve um grande custo computacional para recuperar imagens 3D. Um sensor de tempo de voo limitado por tempo fornece uma solução alternativa e escalável por meio de um circuito de pixel compacto e computação menos complicada.
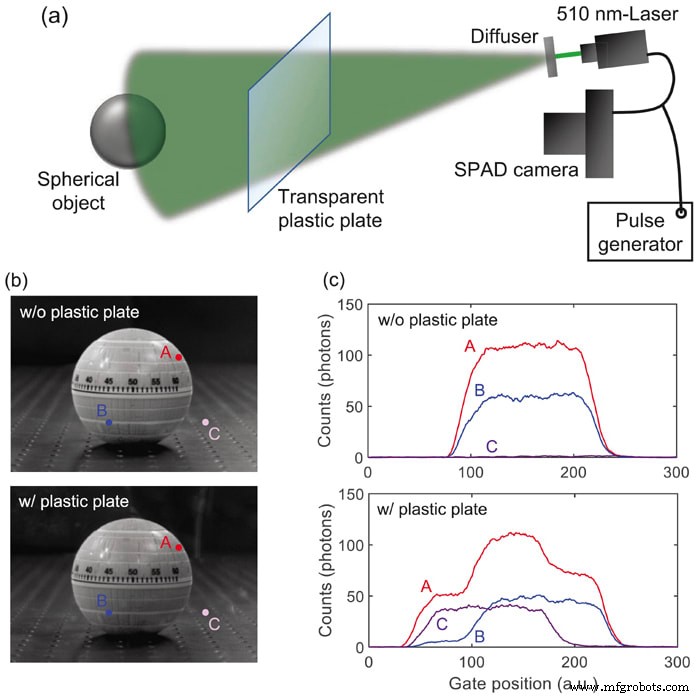
A Figura 4(a) mostra a configuração experimental:um feixe de laser de 510 nm pulsado a 40 MHz é espalhado por um difusor e usado para iluminar um alvo esférico. A câmera SPAD é sincronizada com o sinal de disparo do laser, e uma placa plástica transparente é inserida entre a câmera e o objeto. As distâncias da câmera à placa plástica e ao objeto são 0,45m e 0,75m, respectivamente. A Figura 4(b) mostra imagens de intensidade 2D sob iluminação interna com e sem a placa plástica inserida. Como a placa é quase transparente, nenhuma diferença significativa é observada nas imagens 2D para esses dois casos.
Os perfis de fechamento de tempo medidos para três pontos representativos (A, B e C) são plotados na Figura 4(c). Sem a placa, os perfis de fechamento de tempo para os pontos A e B mostram apenas uma única forma de onda de função retangular suavizada com sua borda ascendente em torno da posição de portão 100 (um passo da posição correspondente a 36 ps). Para o ponto C, a contagem de fótons permanece próxima de zero na faixa de posição da porta medida, indicando que nenhum objeto refletivo é detectado neste pixel.
Com a placa de plástico, em contraste, o perfil no ponto A mostra bordas ascendentes de duas etapas em torno das posições de porta 40 e 100. Dado que o perfil medido de contagens de fótons é uma convolução de uma única função retangular suavizada e a distribuição de intensidade de fótons refletidos, o perfil de duas etapas é uma evidência convincente de dupla reflexão da placa de plástico e do objeto esférico. Comportamento semelhante é observado no ponto B, onde a inclinação da primeira borda de subida em torno da posição do portão 40 é mais suave que a do ponto A. O perfil no ponto C mostra apenas uma única borda de subida em torno da posição do portão 40, correspondente à reflexão do plástico prato. A variação da inclinação para a borda ascendente em torno da posição da comporta 40 entre diferentes pontos é induzida pela reflexão não uniforme da superfície da placa de plástico.
Os resultados demonstram a capacidade de uma câmera SPAD com controle de tempo para realizar detecção de múltiplos objetos sobrepostos espacialmente. Observe que o esquema proposto pode ser aplicado à detecção de mais de dois picos de reflexão. A varredura mais precisa da janela do portão virtual no pós-processamento permite a detecção sistemática de vários picos. A distância mínima resolvível entre dois materiais refletivos vizinhos é fundamentalmente limitada pelo tempo finito de subida ou descida do perfil da janela do portão, correspondendo a 5-10 cm neste sensor SPAD.
Em conclusão, um sensor de imagem SPAD de 1 Mpixel com controle de tempo foi relatado pela primeira vez. Na pesquisa SPAD, alcançar um sensor SPAD megapixel tem sido considerado um dos marcos mais importantes por mais de uma década. O sensor é aplicado a imagens 2D de alta faixa dinâmica e imagens 3D de alta resolução espaço-temporal. Até onde sabemos, a detecção de múltiplos objetos sobrepostos espacialmente com o esquema de fechamento de tempo de fóton único foi demonstrada experimentalmente pela primeira vez.
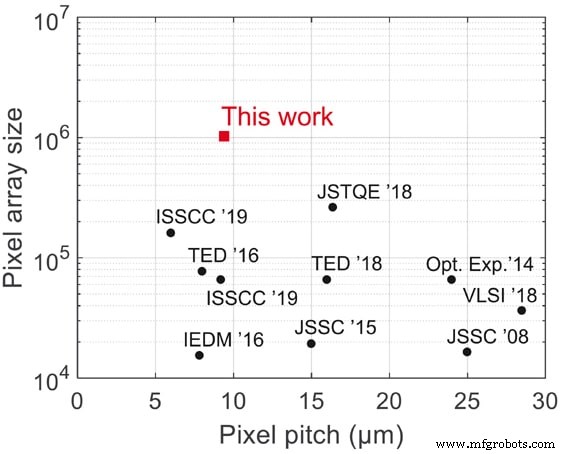
A Figura 5 mostra uma comparação de última geração do espaçamento do pixel SPAD e do tamanho da matriz. O tamanho da matriz do sensor é o maior, quase 4 vezes maior que o do sensor de última geração, enquanto o pixel pitch é um dos menores. Devido às suas capacidades de imagem 2D e 3D de alta resolução, o sensor proposto será útil em uma ampla variedade de aplicações industriais, como aplicações de segurança, automotivas, robóticas, biomédicas e científicas, incluindo imagens quânticas e imagens de ultra-alta velocidade.
Leia um relatório completo sobre a tecnologia da revista científica Optica .
Este artigo foi escrito por Edoardo Charbon, Professor, EPFL Suíça (Lausanne, Suíça). Para mais informações, visite aqui .
Construção de telescópio gigante vista através de uma lente industrial
Superando armadilhas ao medir ópticas finas e paralelas
Sensor
- Câmera
- Investimentos em tecnologia de manufatura - Pós-pandemia
- BrickPi Bookreader
- Tecnologia de movimento linear
- Câmera multidisparo sem lente
- Scanner corporal de ondas milimétricas de alta definição
- Guia do Fornecedor 2021:Sensores
- Colheitadeira de Energia Térmica Sanduíche Piroelétrica
- Câmera Plenoptica
- Matriz de nanosensores de língua eletrônica