


Transdutores de instrumentação AC
Assim como os dispositivos foram feitos para medir certas quantidades físicas e repetir essas informações na forma de sinais elétricos CC (termopares, medidores de tensão, sondas de pH, etc.), dispositivos especiais foram feitos para fazer o mesmo com CA.
Freqüentemente, é necessário ser capaz de detectar e transmitir a posição física de peças mecânicas por meio de sinais elétricos. Isso é especialmente verdadeiro nas áreas de controle automatizado de máquinas-ferramenta e robótica. Uma maneira simples e fácil de fazer isso é com um potenciômetro:
Usando o potenciômetro
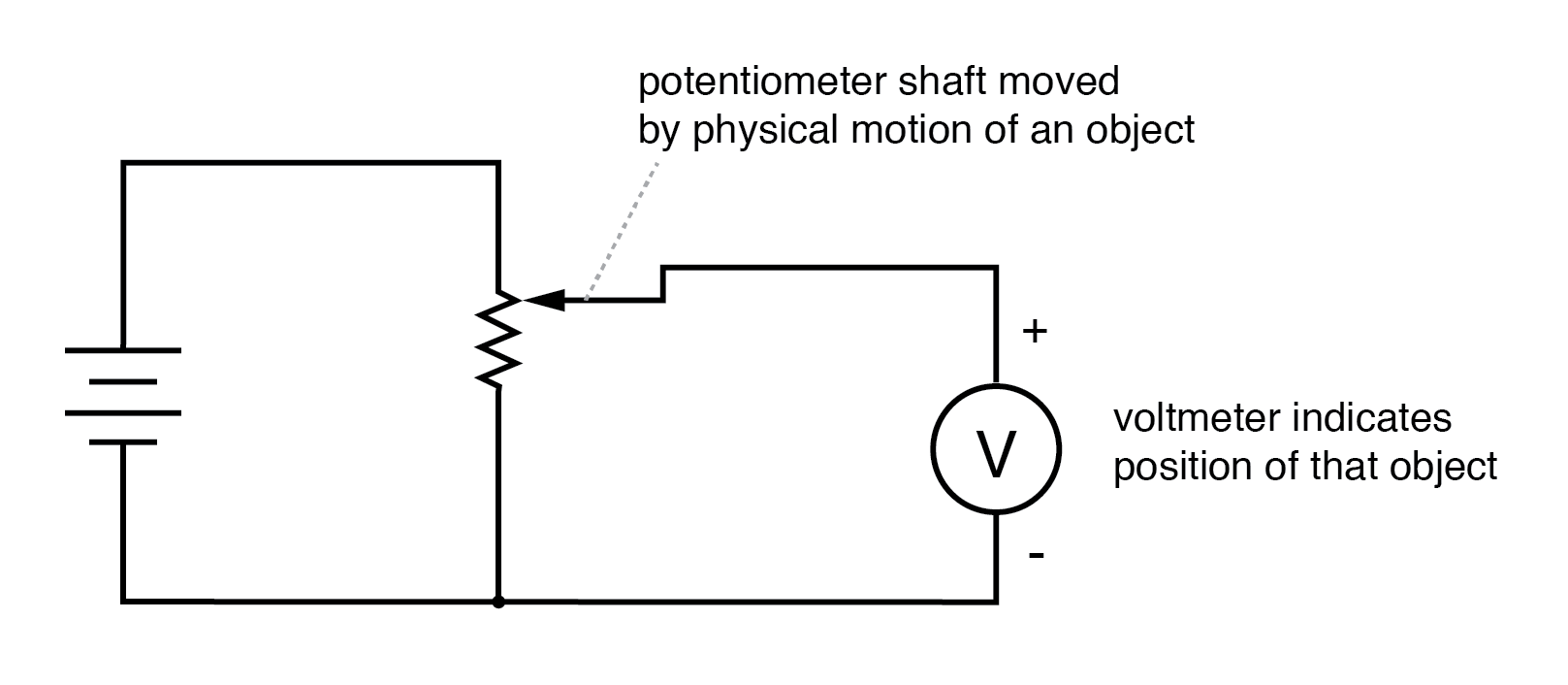
A tensão da derivação do potenciômetro indica a posição de um objeto ligado ao eixo.
No entanto, os potenciômetros têm seus próprios problemas exclusivos. Por um lado, eles dependem do contato físico entre o “limpador” e a faixa de resistência, o que significa que sofrem os efeitos do desgaste físico ao longo do tempo.
Conforme os potenciômetros se desgastam, sua saída proporcional em relação à posição do eixo se torna cada vez menos certa. Você já deve ter experimentado esse efeito ao ajustar o controle de volume em um rádio antigo:ao girar o botão, você pode ouvir sons de “arranhões” saindo dos alto-falantes.
Esses ruídos são o resultado de mau contato do limpador no potenciômetro de controle de volume.
Além disso, este contato físico entre o limpador e a tira cria a possibilidade de formação de arco (faíscas) entre os dois conforme o limpador é movido.
Com a maioria dos circuitos de potenciômetro, a corrente é tão baixa que o arco do limpador é desprezível, mas é uma possibilidade a ser considerada.
Se o potenciômetro for operado em um ambiente onde haja vapor ou poeira combustível, esse potencial de formação de arco se traduz em um potencial de explosão!
Usando LVDT
Usando AC em vez de DC, podemos evitar completamente o contato deslizante entre as peças se usarmos um transformador variável em vez de um potenciômetro.
Os dispositivos feitos para esse fim são chamados de LVDTs, que significa L inear V ariável D ifferencial T ransformers. O design de um LVDT é assim:
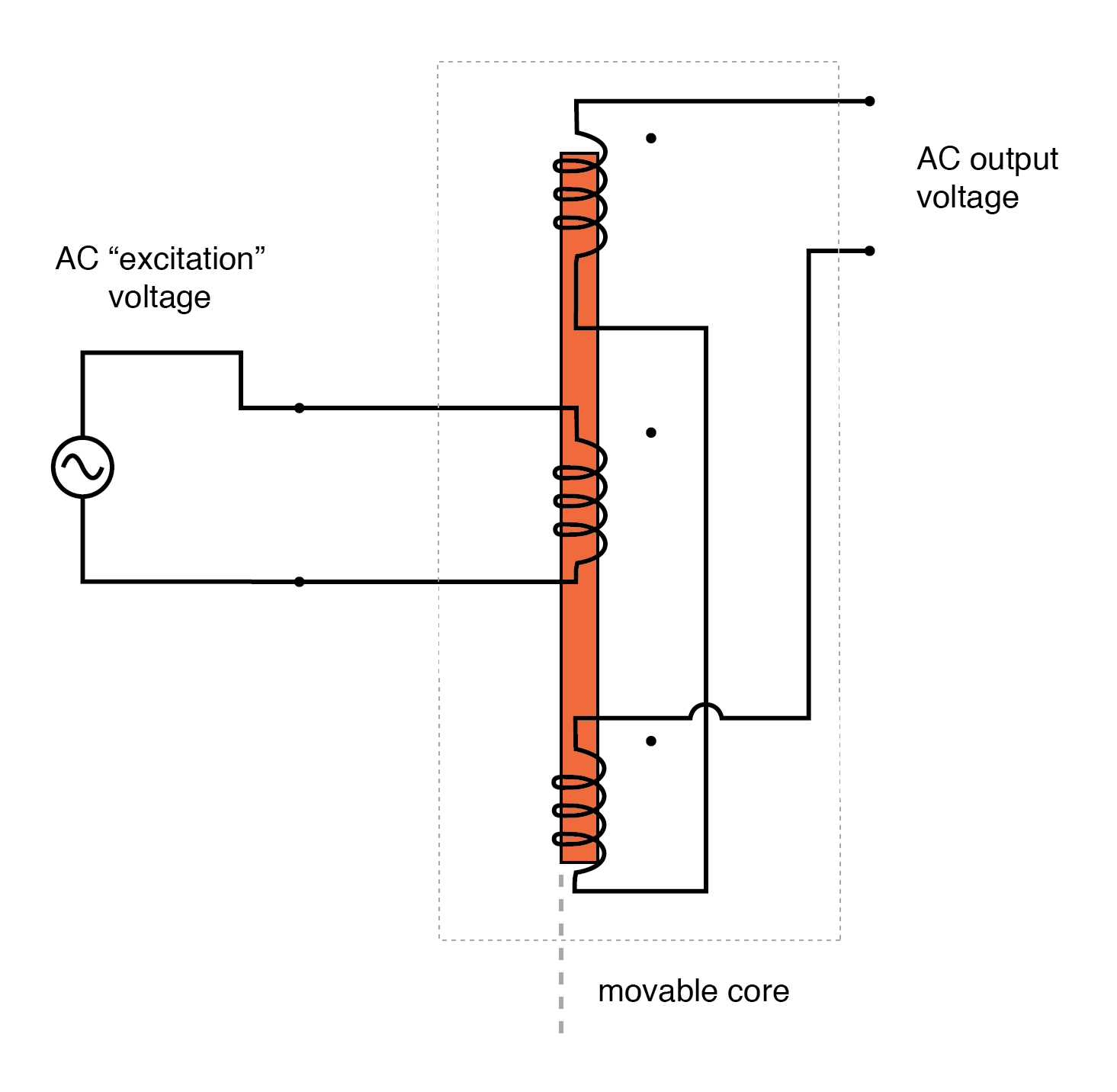
A saída CA do transformador diferencial linear variável (LVDT) indica a posição central.
Obviamente, este dispositivo é um transformador :tem um único enrolamento primário alimentado por uma fonte externa de tensão CA e dois enrolamentos secundários conectados em série.
É variável porque o núcleo está livre para se mover entre os enrolamentos. É diferencial devido à forma como os dois enrolamentos secundários são conectados. Sendo dispostos em oposição um ao outro (180 ° fora de fase) significa que a saída deste dispositivo será a diferença entre a saída de tensão dos dois enrolamentos secundários.
Quando o núcleo está centralizado e ambos os enrolamentos estão produzindo a mesma tensão, o resultado líquido nos terminais de saída será zero volts. É chamado de linear porque a liberdade de movimento do núcleo é em linha reta.
A saída de tensão CA por um LVDT indica a posição do núcleo móvel. Zero volts significa que o núcleo está centralizado.
Quanto mais longe o núcleo estiver da posição central, maior a porcentagem de tensão de entrada (“excitação”) será vista na saída. A fase da tensão de saída em relação à tensão de excitação indica em qual direção do centro o núcleo está deslocado.
A principal vantagem de um LVDT sobre um potenciômetro para detecção de posição é a ausência de contato físico entre as partes móveis e estacionárias.
O núcleo não entra em contato com os enrolamentos do fio, mas desliza para dentro e para fora dentro de um tubo não condutor. Assim, o LVDT não se “desgasta” como um potenciômetro, nem há a possibilidade de se formar um arco.
A excitação do LVDT é normalmente de 10 volts RMS ou menos, em frequências que variam da linha de alimentação à faixa de áudio alto (20 kHz). Uma desvantagem potencial do LVDT é seu tempo de resposta, que depende principalmente da frequência da fonte de tensão CA.
Se forem desejados tempos de resposta muito rápidos, a frequência deve ser mais alta para permitir a quaisquer circuitos de detecção de voltagem ciclos suficientes de CA para determinar o nível de voltagem conforme o núcleo é movido.
Para ilustrar o problema potencial aqui, imagine este cenário exagerado:um LVDT alimentado por uma fonte de tensão de 60 Hz, com o núcleo sendo movido para dentro e para fora centenas de vezes por segundo.
A saída deste LVDT nem seria semelhante a uma onda senoidal porque o núcleo seria movido ao longo de sua amplitude de movimento antes que a tensão da fonte CA pudesse completar um único ciclo! Seria quase impossível determinar a posição do núcleo instantâneo se ele se movesse mais rápido do que a tensão da fonte instantânea.
Usando RVDT
Uma variação do LVDT é o RVDT, ou R otário V ariável D ifferencial T ransformer. Este dispositivo funciona quase com o mesmo princípio, exceto que o núcleo gira em um eixo em vez de se mover em linha reta. Os RVDTs só podem ser construídos para uma porção de movimento de 360 ° (círculo completo).
Usando Synchro ou Selsyn
Continuando com este princípio, temos o que é conhecido como Synchro ou Selsyn , que é um dispositivo construído de forma muito semelhante a um motor ou gerador CA polifásico com rotor enrolado.
O rotor é livre para girar 360 ° completos, como um motor. No rotor há um único enrolamento conectado a uma fonte de tensão CA, bem como o enrolamento primário de um LVDT. Os enrolamentos do estator são geralmente na forma de um Y trifásico, embora os sincros com mais de três fases tenham sido construídos. (Figura abaixo)
Um dispositivo com um estator de duas fases é conhecido como resolvedor . Um resolver produz saídas de seno e cosseno que indicam a posição do eixo.
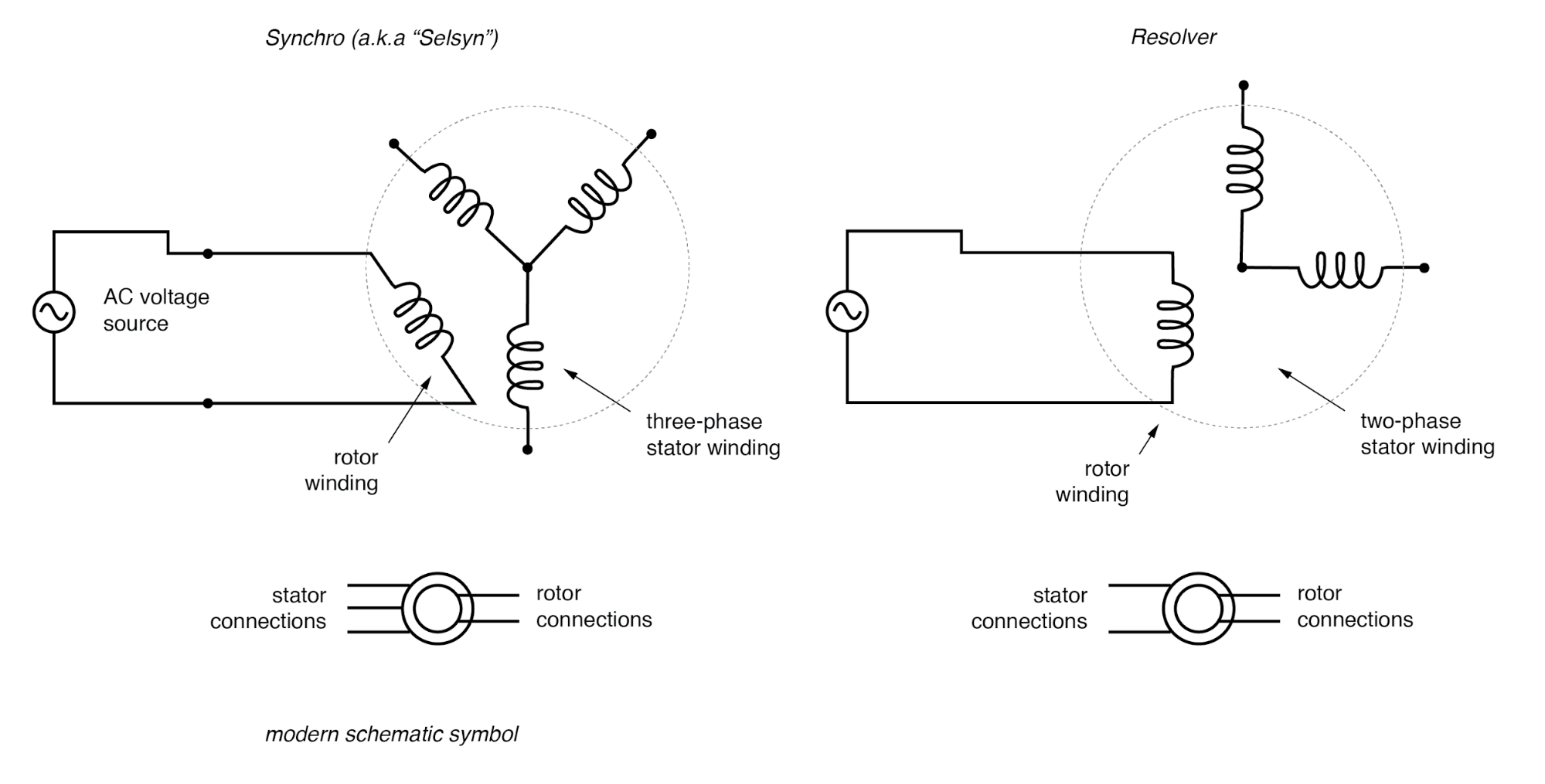
Um sincronizador é enrolado com um enrolamento de estator trifásico e um campo rotativo. Um resolvedor tem um estator de duas fases.
As tensões induzidas nos enrolamentos do estator a partir da excitação CA do rotor não com deslocamento de fase de 120 ° como em um gerador trifásico real. Se o rotor fosse energizado com corrente DC em vez de AC e o eixo girasse continuamente, as tensões seriam verdadeiramente trifásicas.
Mas não é assim que um sincronizador é projetado para ser operado. Em vez disso, este é um sensor de posição dispositivo muito parecido com um RVDT, exceto que seu sinal de saída é muito mais definido. Com o rotor energizado por CA, as tensões do enrolamento do estator serão proporcionais em magnitude à posição angular do rotor, fase 0 ° ou 180 ° deslocada, como um LVDT ou RVDT regular.
Você pode pensar nele como um transformador com um enrolamento primário e três enrolamentos secundários, cada enrolamento secundário orientado em um ângulo exclusivo.
Conforme o rotor é girado lentamente, cada enrolamento por sua vez se alinhará diretamente com o rotor, produzindo tensão total, enquanto os outros enrolamentos produzirão algo menos do que tensão total.
Os sincronizadores são freqüentemente usados em pares. Com seus rotores conectados em paralelo e energizados pela mesma fonte de tensão CA, seus eixos corresponderão à posição com um alto grau de precisão:
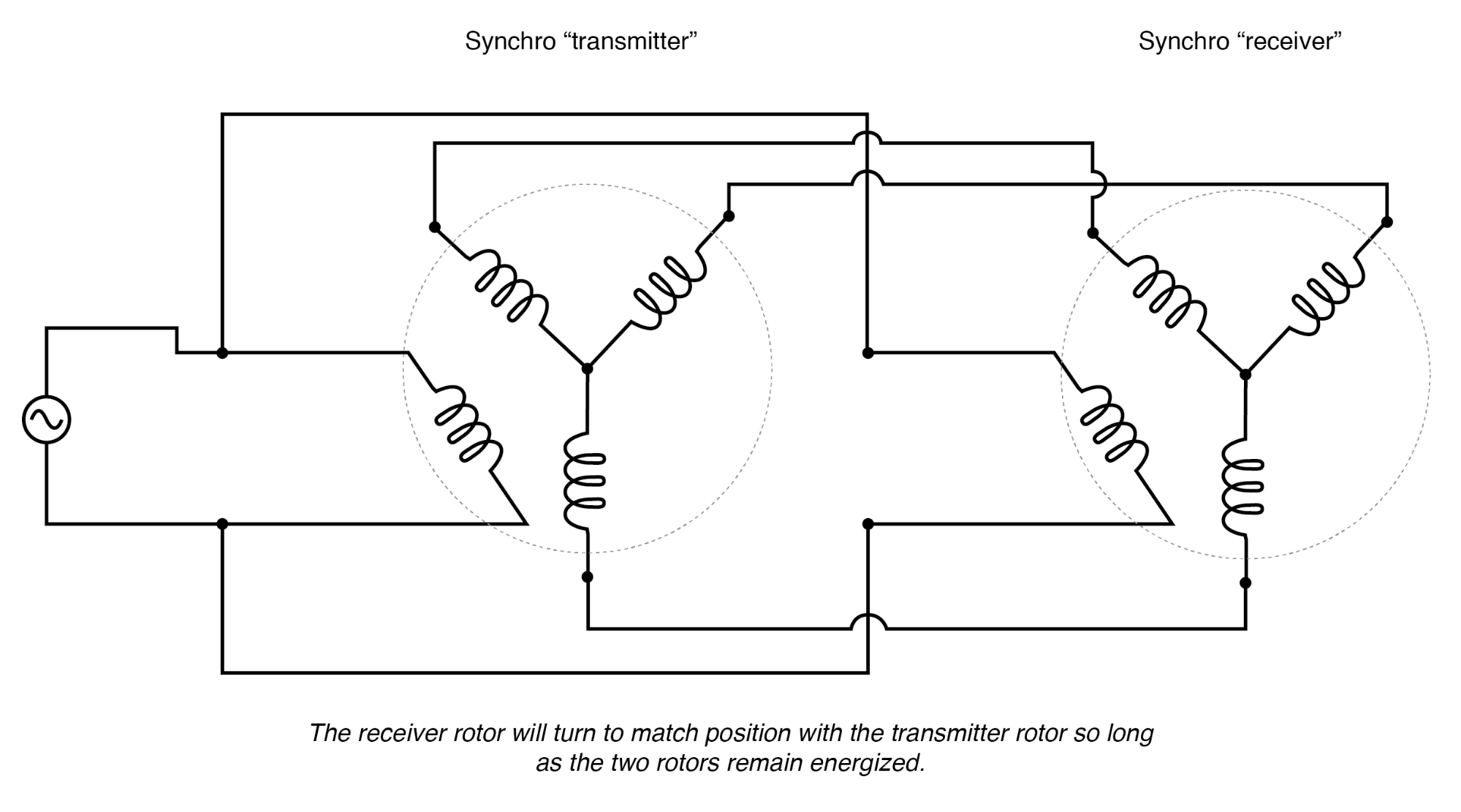
Os eixos Synchro são escravos uns dos outros. Girar um move o outro.
Esses pares “transmissor / receptor” têm sido usados em navios para retransmitir a posição do leme ou para retransmitir a posição do giroscópio de navegação em distâncias razoavelmente longas.
A única diferença entre o “transmissor” e o “receptor” é aquele que é girado por uma força externa. O “receptor” pode ser usado tão facilmente quanto o “transmissor”, forçando seu eixo a girar e deixando o sincronizador na posição esquerda correspondente.
Se o rotor do receptor for deixado sem energia, ele atuará como um detector de erro de posição, gerando uma tensão CA no rotor se o eixo for diferente de 90o ou 270o deslocado da posição do eixo do transmissor.
O rotor do receptor não irá mais gerar nenhum torque e, conseqüentemente, não irá mais combinar automaticamente a posição com a do transmissor:
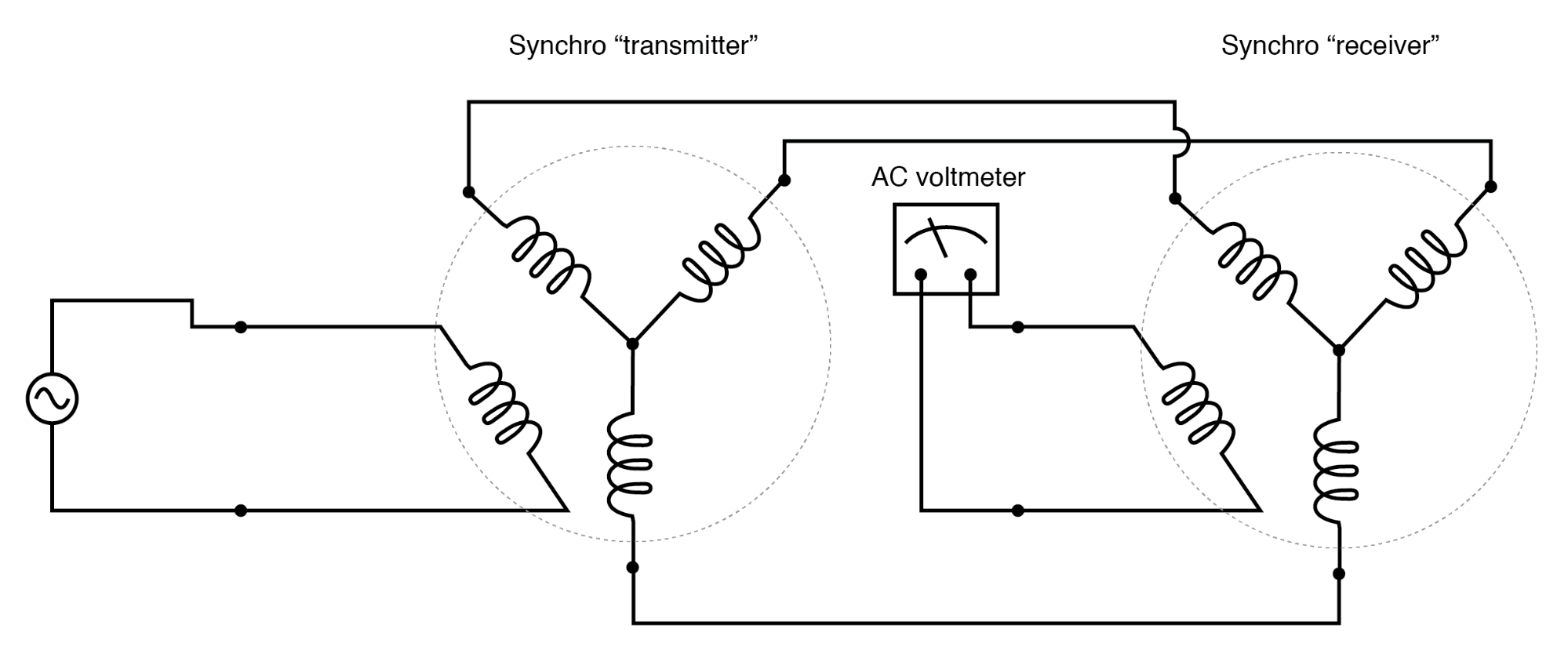
O voltímetro CA registra a tensão se o rotor do receptor não for girado exatamente 90 ou 270 graus a partir do rotor do transmissor.
Isso pode ser considerado quase como uma espécie de circuito de ponte que atinge o equilíbrio apenas se o eixo do receptor for colocado em uma das duas posições (correspondentes) com o eixo do transmissor.
Uma aplicação bastante engenhosa do sincro é na criação de um dispositivo de mudança de fase, desde que o estator seja energizado por CA trifásico:
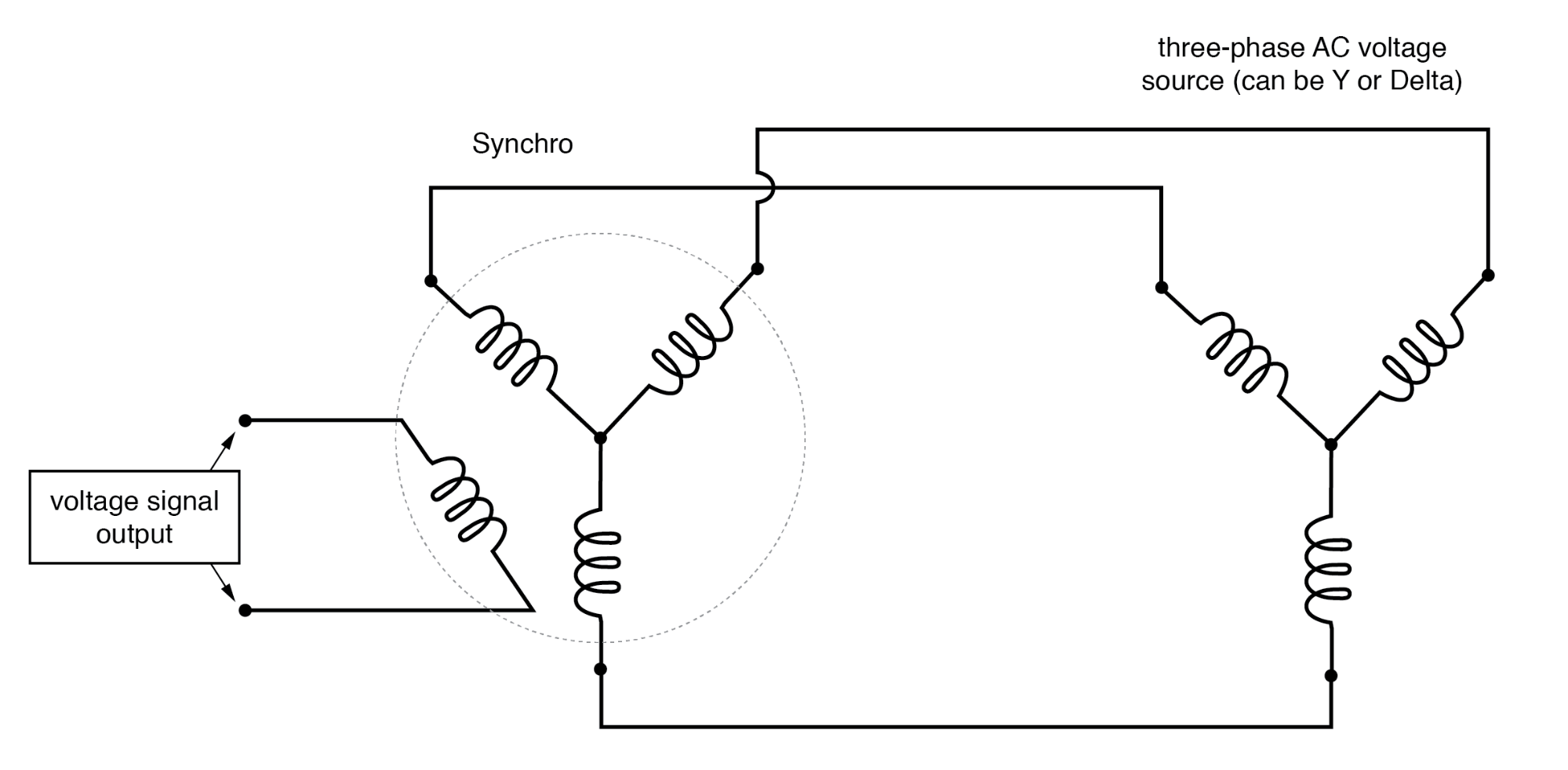
A rotação completa do rotor mudará suavemente a fase de 0 ° até 360 ° (de volta a 0 °).
Conforme o rotor do sincro é girado, a bobina do rotor se alinha progressivamente com cada bobina do estator, seus respectivos campos magnéticos sendo deslocados de fase 120 ° um do outro.
Entre essas posições, esses campos com mudança de fase se misturarão para produzir uma tensão do rotor em algum lugar entre 0 °, 120 ° ou 240 ° de mudança. O resultado prático é um dispositivo capaz de fornecer uma tensão CA de fase infinitamente variável com o giro de um botão (preso ao eixo do rotor).
Um sincro ou um resolver pode medir o movimento linear se equipado com um mecanismo de cremalheira e pinhão.
Um movimento linear de algumas polegadas (ou cm), resultando em várias revoluções do sincro (resolver), gera uma seqüência de ondas senoidais. Um Inductosyn ® é uma versão linear do resolver. Ele emite sinais como um resolver; entretanto, tem uma ligeira semelhança.
O Inductosyn consiste em duas partes:um enrolamento serpentino fixo com passo de 0,1 pol. Ou 2 mm e um enrolamento móvel conhecido como controle deslizante . (Figura abaixo)
O controle deslizante tem um par de enrolamentos com o mesmo passo do enrolamento fixo. Os enrolamentos do controle deslizante são compensados por um quarto de passo, de forma que as ondas seno e cosseno são produzidas pelo movimento.
Um enrolamento do controle deslizante é adequado para a contagem de pulsos, mas não fornece informações de direção.
Os enrolamentos de 2 fases fornecem informações de direção na fase das ondas seno e cosseno. O movimento em um tom produz um ciclo de ondas seno e cosseno; vários tons produzem uma seqüência de ondas.
Inductosyn:(a) Enrolamento serpentino fixo, (b) Enrolamentos de duas fases deslizantes móveis. Adaptado da Figura 6.16 [WAK]
Quando dizemos que as ondas seno e cosseno são produzidas em função do movimento linear, realmente queremos dizer que uma portadora de alta frequência é modulada em amplitude conforme o controle deslizante se move.
Os dois sinais AC do controle deslizante devem ser medidos para determinar a posição dentro de um passo, a posição fina. Quantos arremessos o controle deslizante se moveu? A relação dos sinais de seno e cosseno não revela isso. No entanto, o número de arremessos (número de ondas) pode ser contado a partir de um ponto de partida conhecido produzindo uma posição grosseira.
Este é um codificador incremental . Se a posição absoluta deve ser conhecida independentemente do ponto de partida, um resolver auxiliar engrenado para uma revolução por comprimento fornece uma posição aproximada. Este constitui um codificador absoluto .
Um Inductosyn linear tem uma proporção de transformador de 100:1. Compare isso com a proporção de 1:1 para um resolvedor. A excitação de alguns volts AC em um Inductosyn produz alguns milivolts de saída.
Este nível de sinal baixo é convertido para um formato digital de 12 bits por um resolver para conversor digital (RDC) . Resolução de 25 micropolegadas é alcançável.
Também existe uma versão rotativa do Inductosyn com 360 passos de padrão por revolução. Quando usado com um resolver de 12 bits para conversor digital, é possível obter uma resolução melhor de 1 segundo de arco. Este é um codificador incremental.
A contagem de passos a partir de um ponto de partida conhecido é necessária para determinar a posição absoluta. Alternativamente, um resolver pode determinar a posição absoluta grosseira.
Transdutores capacitivos
Até agora, os transdutores discutidos foram todos da variedade indutiva. No entanto, é possível fazer transdutores que operam com capacitância variável também, sendo a CA usada para detectar a mudança na capacitância e gerar uma tensão de saída variável.
Lembre-se de que a capacitância entre duas superfícies condutoras varia com três fatores principais:a área de sobreposição dessas duas superfícies, a distância entre elas e a constante dielétrica do material entre as superfícies.
Se duas de três dessas variáveis podem ser fixadas (estabilizadas) e a terceira pode variar, então qualquer medição de capacitância entre as superfícies será apenas indicativa de mudanças nessa terceira variável.
Os pesquisadores médicos há muito fazem uso do sensoriamento capacitivo para detectar mudanças fisiológicas em corpos vivos.
Já em 1907, um pesquisador alemão chamado H. Cremer colocou duas placas de metal em cada lado do coração de um sapo e mediu as mudanças de capacitância resultantes do coração se enchendo e esvaziando alternadamente de sangue.
Medidas semelhantes foram realizadas em seres humanos com placas de metal colocadas no tórax e nas costas, registrando a ação respiratória e cardíaca por meio de mudanças de capacitância.
Para medições capacitivas mais precisas da atividade do órgão, sondas de metal foram inseridas em órgãos (especialmente o coração) nas pontas dos tubos do cateter, a capacitância sendo medida entre a sonda de metal e o corpo do sujeito.
Com uma frequência de excitação CA suficientemente alta e detector de voltagem sensível o suficiente, não apenas a ação de bombeamento, mas também os sons do coração ativo pode ser prontamente interpretado.
Como os transdutores indutivos, os transdutores capacitivos também podem ser feitos para serem unidades autocontidas, ao contrário dos exemplos fisiológicos diretos descritos acima.
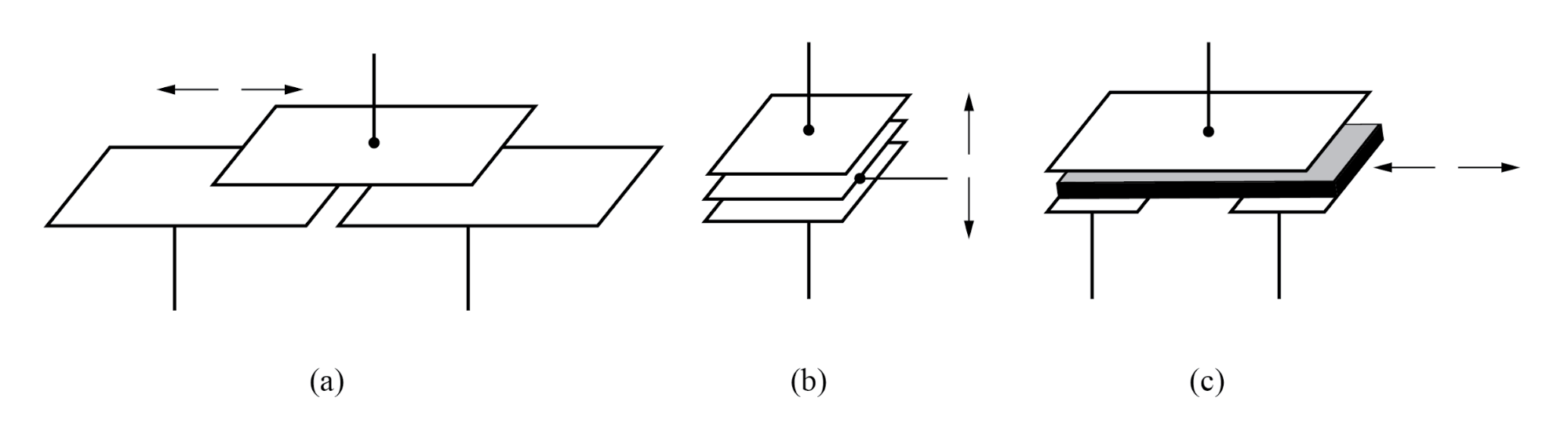
Alguns transdutores funcionam fazendo com que uma das placas do capacitor seja móvel, seja de forma a variar a área de sobreposição ou a distância entre as placas. Outros transdutores funcionam movendo um material dielétrico para dentro e para fora entre duas placas fixas:
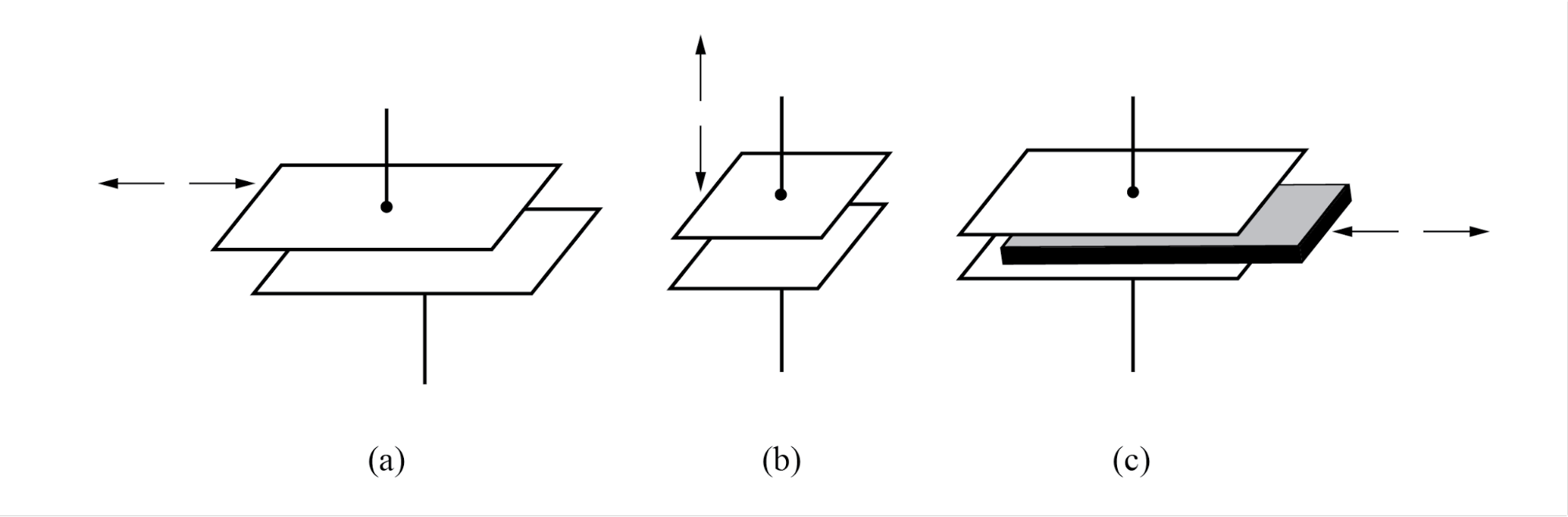
Transdutor capacitivo variável varia; (a) área de sobreposição, (b) distância entre as placas, (c) quantidade de dielétrico entre as placas.
Transdutores com maior sensibilidade e imunidade a mudanças em outras variáveis podem ser obtidos por meio de projeto diferencial, muito parecido com o conceito por trás do LVDT (Linear Variable Diferencial Transformador). Aqui estão alguns exemplos de transdutores capacitivos diferenciais:
O transdutor capacitivo diferencial varia a taxa de capacitância mudando:(a) área de sobreposição, (b) distância entre as placas, (c) dielétrico entre as placas.
Como você pode ver, todos os dispositivos diferenciais mostrados na ilustração acima têm três conexões de fios em vez de dois:um fio para cada uma das placas “terminais” e um para a placa “comum”.
Conforme a capacitância entre uma das placas “terminais” e a placa “comum” muda, a capacitância entre a outra placa “terminal” e a placa “comum” muda na direção oposta. Este tipo de transdutor se presta muito bem à implementação em um circuito de ponte:
Ponte do transdutor capacitivo diferencial
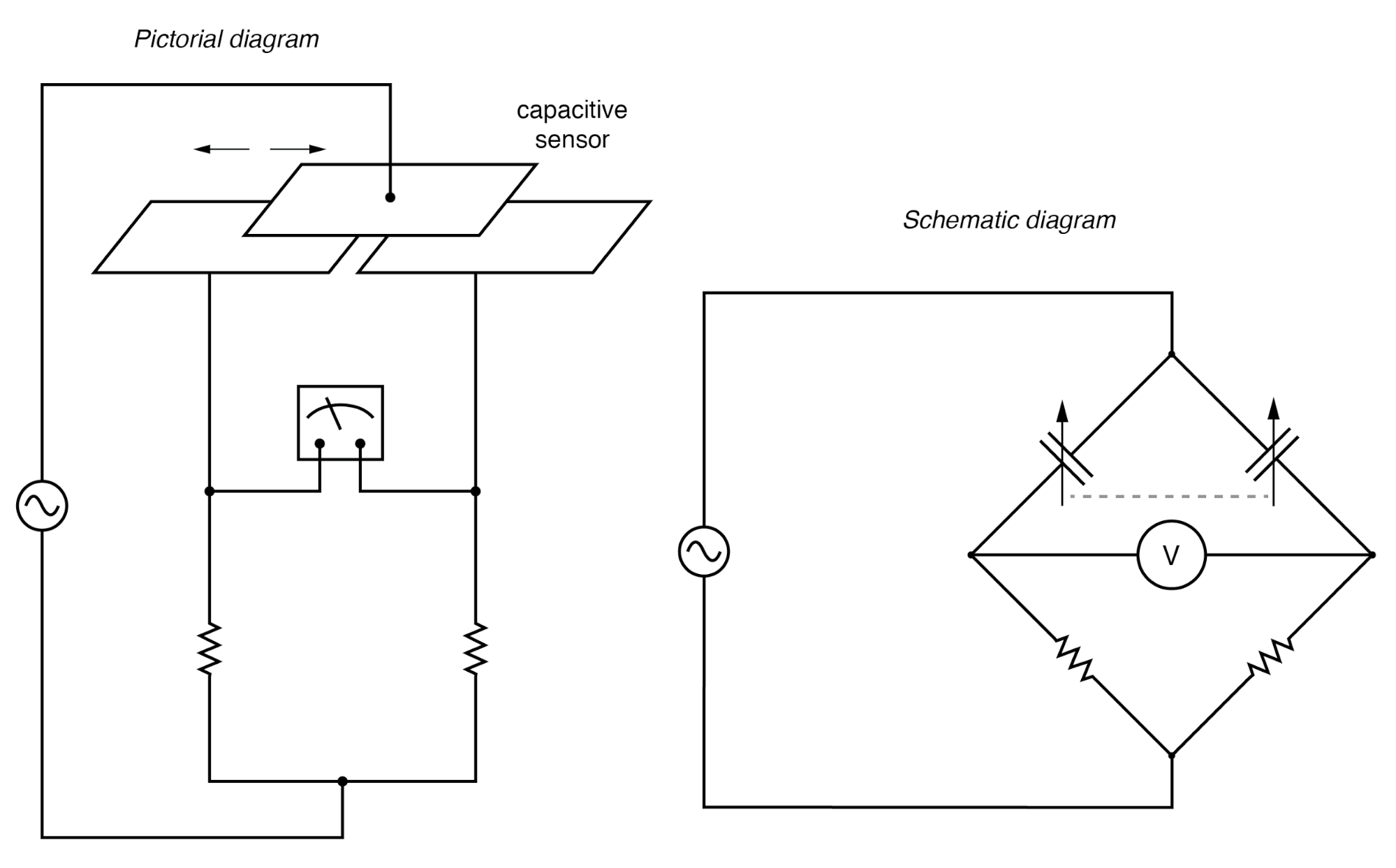
Circuito de medição da ponte do transdutor capacitivo diferencial.
Transdutores capacitivos fornecem capacitâncias relativamente pequenas para um circuito de medição operar, normalmente no pico alcance farad. Por causa disso, altas frequências de fonte de alimentação (na faixa de megahertz!) São normalmente necessárias para reduzir essas reatâncias capacitivas a níveis razoáveis.
Dadas as pequenas capacitâncias fornecidas por transdutores capacitivos típicos, as capacitâncias parasitas têm o potencial de ser as principais fontes de erro de medição. Uma boa blindagem do condutor é essencial para circuitos de transdutores capacitivos confiáveis e precisos!
O circuito em ponte não é a única maneira de interpretar efetivamente a saída da capacitância diferencial de tal transdutor, mas é um dos mais simples de implementar e entender. Tal como acontece com o LVDT, a saída de tensão da ponte é proporcional ao deslocamento da ação do transdutor de sua posição central, e a direção do deslocamento será indicada pela mudança de fase.
Este tipo de circuito de ponte é semelhante em função ao tipo usado com medidores de tensão:não se destina a estar em uma condição “equilibrada” o tempo todo, mas sim o grau de desequilíbrio representa a magnitude da quantidade que está sendo medida.
Transdutor Capacitivo Diferencial “Twin-T”
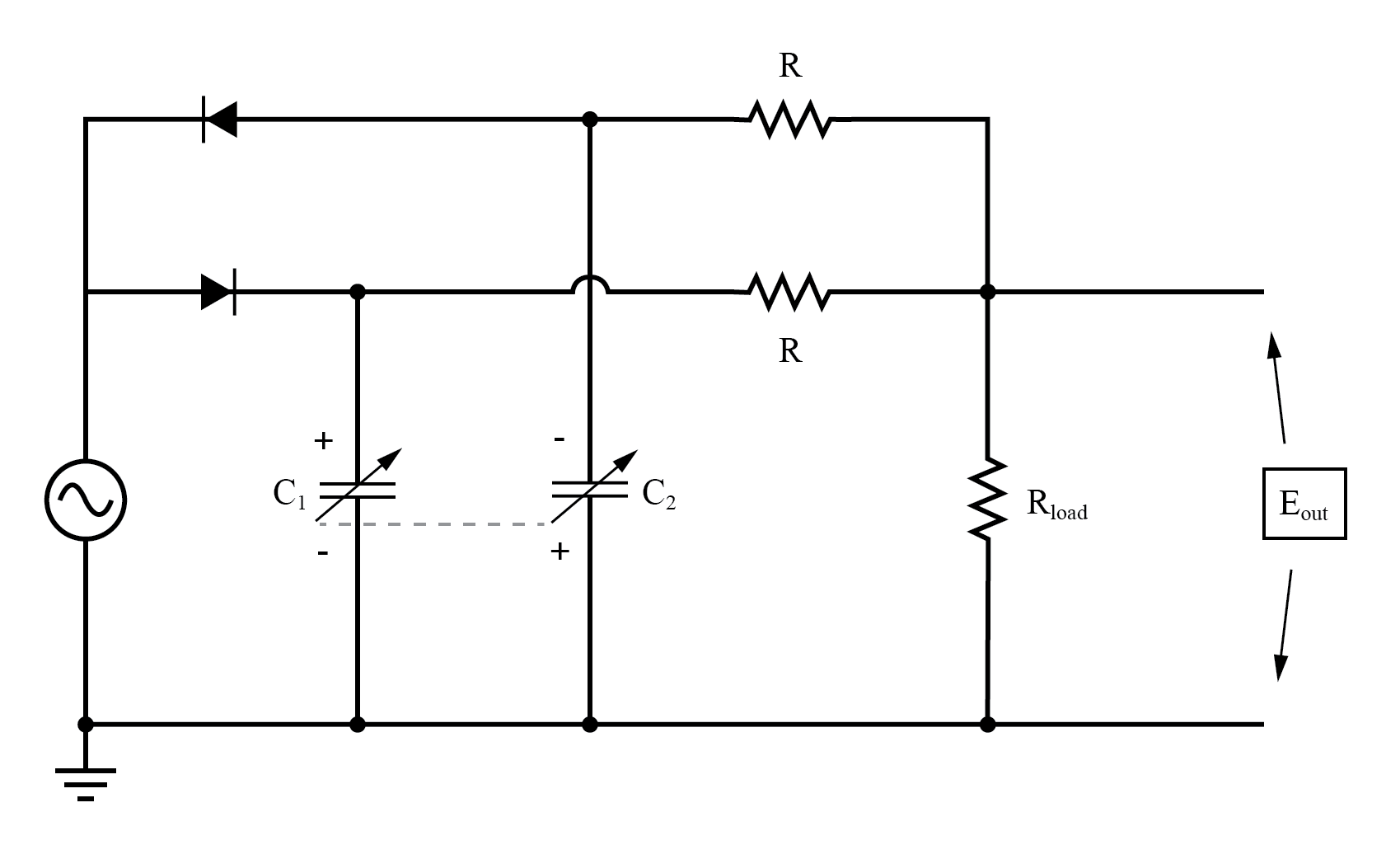
Uma alternativa interessante para o circuito de ponte para interpretar a capacitância diferencial é o Twin-T . Requer o uso de diodos, aquelas "válvulas unidirecionais" para corrente elétrica mencionadas anteriormente no capítulo:
Circuito de medição do transdutor capacitivo diferencial “Twin-T”.
Este circuito pode ser melhor compreendido se redesenhado para se parecer mais com uma configuração de ponte:
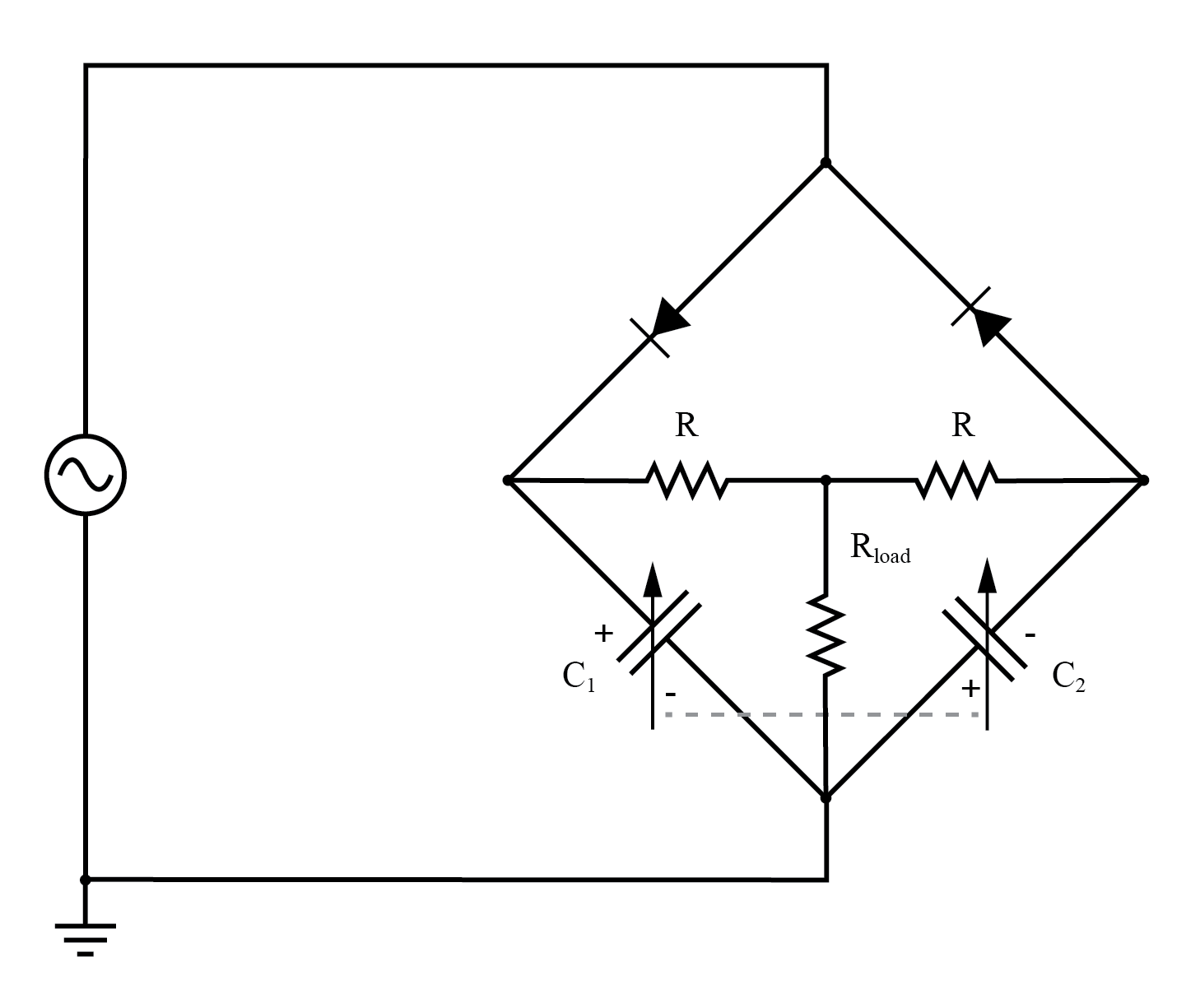
Transdutor de capacitor diferencial “Twin-T” circuito de medição redesenhado como uma ponte. A saída é através de R carga .
Capacitor C 1 é carregado pela fonte de tensão CA durante cada meio-ciclo positivo (positivo conforme medido em referência ao ponto de aterramento), enquanto C 2 é carregado durante cada meio-ciclo negativo.
Enquanto um capacitor está sendo carregado, o outro capacitor descarrega (a uma taxa mais lenta do que foi carregado) através da rede de três resistores. Como consequência, C 1 mantém uma tensão DC positiva em relação ao aterramento e C 2 uma tensão DC negativa em relação ao aterramento.
Se o transdutor capacitivo for deslocado da posição central, um capacitor aumentará em capacitância enquanto o outro diminuirá. Isso tem pouco efeito na carga de tensão de pico de cada capacitor, pois há resistência desprezível no caminho da corrente de carga da fonte ao capacitor, resultando em uma constante de tempo muito curta (τ).
No entanto, quando chega a hora de descarregar através dos resistores, o capacitor com o maior valor de capacitância manterá sua carga por mais tempo, resultando em uma maior tensão CC média ao longo do tempo do que o capacitor de menor valor.
O resistor de carga (R load ), conectado em uma extremidade ao ponto entre os dois resistores de valor igual (R) e na outra extremidade ao aterramento, não cairá nenhuma tensão DC se as cargas de tensão DC dos dois capacitores forem iguais em magnitude.
Se, por outro lado, um capacitor mantém uma carga de tensão CC maior do que o outro devido a uma diferença na capacitância, o resistor de carga cairá uma tensão proporcional à diferença entre essas tensões.
Assim, a capacitância diferencial é traduzida em uma tensão CC através do resistor de carga.
Através do resistor de carga, há tensão CA e CC presente, com apenas a tensão CC sendo significativa para a diferença na capacitância. Se desejado, um filtro passa-baixa pode ser adicionado à saída deste circuito para bloquear o AC, deixando apenas um sinal DC para ser interpretado pelo circuito de medição:
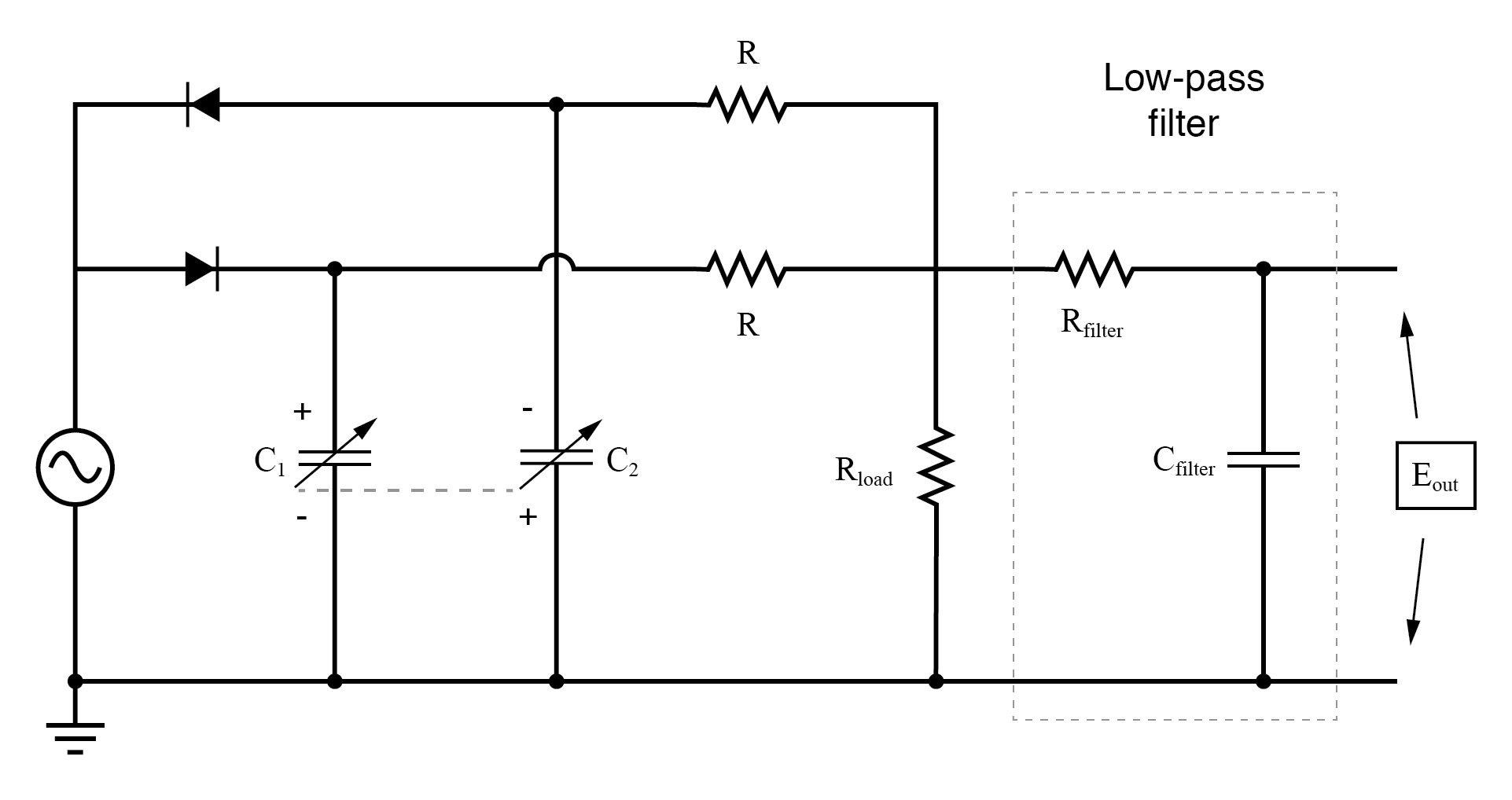
A adição do filtro passa-baixa ao “twin-T” alimenta DC puro para o indicador de medição.
Como um circuito de medição para sensores capacitivos diferenciais, a configuração twin-T apresenta muitas vantagens sobre a configuração de ponte padrão.
Em primeiro lugar, o deslocamento do transdutor é indicado por uma tensão DC simples, não uma tensão AC cuja magnitude e fase deve ser interpretada para dizer qual capacitância é maior.
Além disso, dados os valores de componente adequados e a saída da fonte de alimentação, este sinal de saída CC pode ser forte o suficiente para acionar diretamente o movimento de um medidor eletromecânico, eliminando a necessidade de um circuito amplificador.
Outra vantagem importante é que todos os elementos importantes do circuito têm um terminal diretamente conectado ao terra:a fonte, o resistor de carga e os dois capacitores são todos referenciados ao terra.
Isso ajuda a minimizar os efeitos nocivos da capacitância parasita comumente afetando os circuitos de medição da ponte, eliminando da mesma forma a necessidade de medidas compensatórias, como o aterramento de Wagner.
Este circuito também é fácil de especificar peças. Normalmente, um circuito de medição que incorpora diodos complementares requer a seleção de diodos “combinados” para uma boa precisão. Não é assim com este circuito!
Desde que a tensão da fonte de alimentação seja significativamente maior do que o desvio na queda de tensão entre os dois diodos, os efeitos da incompatibilidade são mínimos e contribuem pouco para o erro de medição.
Além disso, as variações da frequência de alimentação têm um impacto relativamente baixo no ganho (quanta tensão de saída é desenvolvida para uma determinada quantidade de deslocamento do transdutor) e a tensão de alimentação de onda quadrada funciona bem como a onda senoidal, assumindo um ciclo de trabalho de 50% (igual semiciclos positivos e negativos), é claro.
Tecnologia industrial