


Levitação eletromagnética repulsiva Arduino
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| |
| × | 1 | |||
| × | 1 |
Ferramentas e máquinas necessárias
 |
|
Aplicativos e serviços online
 |
|
Sobre este projeto
Alguns anos atrás, eu estava tentando fazer um dispositivo para levitação magnética repulsiva, mas todos os circuitos que eu tinha eram complexos e o ajuste era muito difícil.
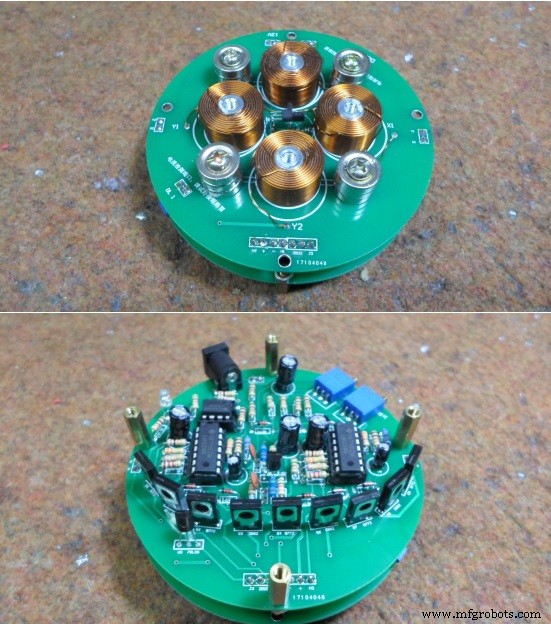
Depois de várias tentativas sem sucesso e sem sucesso, comprei o levitador que vocês podem ver na foto, mas é quase impossível fazer em casa (faça você mesmo).
Agora vou apresentar um Levitator repulsivo que, além da placa Arduino, contém apenas alguns componentes adicionais e é muito fácil para fazer você mesmo:
- Qualquer transistor de potência média:no meu caso BD241
- Diodo universal 1N4001
- Resistor 1 Kohm
- UGN3503 Sensor de efeito Hall (você pode usar qualquer sensor de efeito Hall 5V RATIOMETRIC)
- Ímã de toro de um alto-falante antigo (com um diâmetro de 9 cm a 11 cm e mais).
- Em vez de um grande ímã de toro, podem ser usados grupos de pequenos ímãs de neodímio implantados como um hexágono regular, como em dispositivos comerciais.
- Solenóide composto por cerca de 200 enrolamentos de fio de cobre isolado 30AWG. Neste caso, usei um solenóide removido da antiga gaveta de dinheiro.
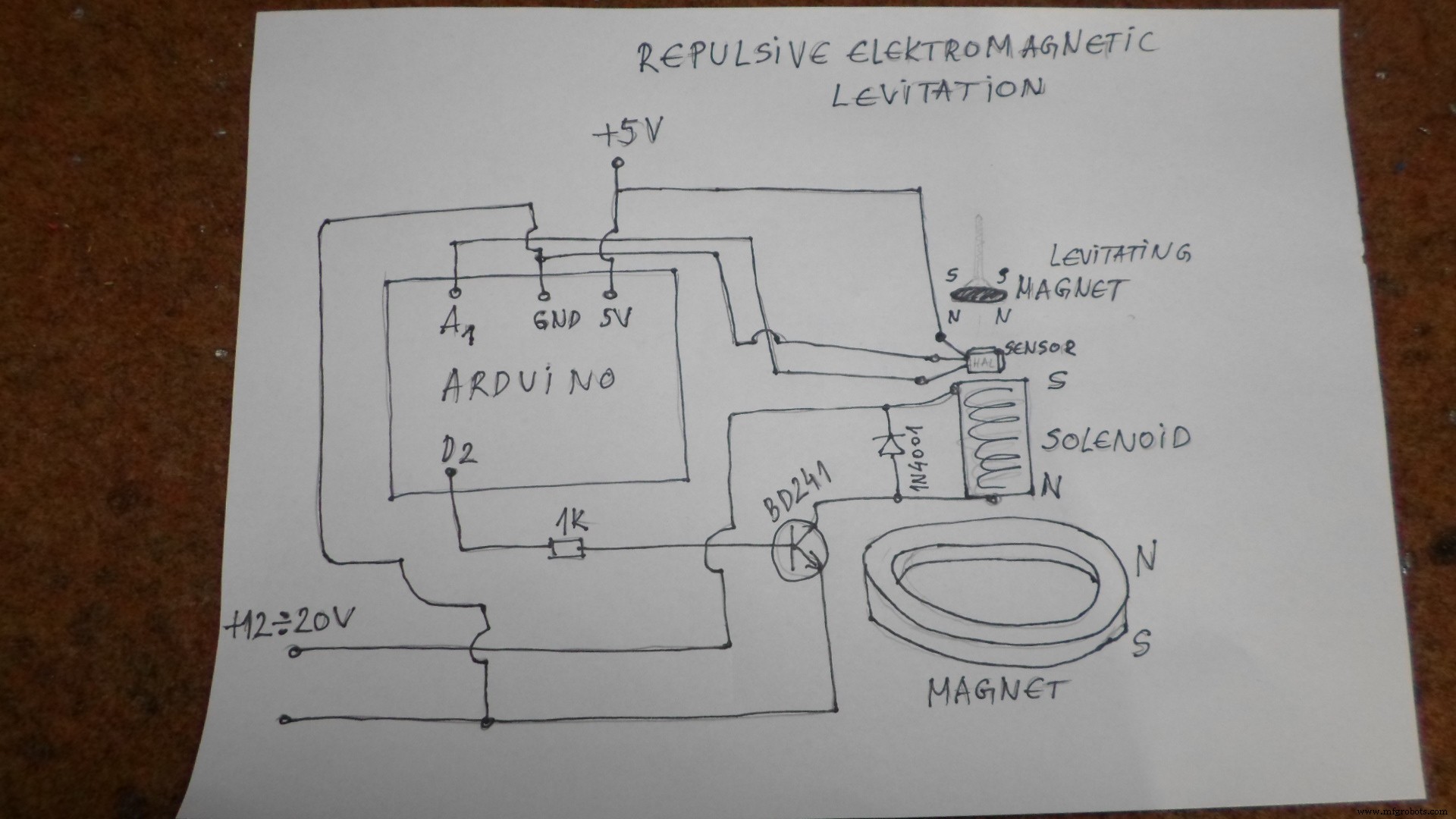
O circuito é muito simples e é apresentado a seguir na foto. O Arduino é alimentado por padrão com 5V e solenóide via transistor com 12v-20v. Ambos têm um terreno comum. A polaridade dos ímãs e do solenóide é mostrada na figura. Para o ajuste, você precisará de um pouco de paciência e tempo, e de fato existe o prazer em fazer um dispositivo. O sensor hal deve estar no topo acima do solenóide. Acima dele é colocado o ímã que deve flutuar. No meu caso, a configuração era mover o ímã de toro para cima e para baixo. também é uma configuração no código, alterando o valor da primeira linha do código e pode variar de 200 a 350. Com uma combinação dessas duas configurações, obtemos os melhores resultados.
Código
- Arquivo sem título
Arquivo sem título Arduino
int set_point =250; // settingsint sensorPin =A1; int output_pin =2; int sensorValue =0; void setup () {Serial.begin (9600); pinMode (output_pin, OUTPUT);} void loop () {sensorValue =analogRead (sensorPin); //Serial.println(sensorValue); if (sensorValue <=set_point) digitalWrite (output_pin, LOW); senão digitalWrite (output_pin, HIGH); } Esquemas
Sistema de monitoramento e detecção de incêndios florestais (com alertas SMS)
Termômetro IoT usando Python
Processo de manufatura
- Dados digitais Arduino
- Sensor de temperatura múltipla
- Controlador de jogo Arduino
- MotionSense
- Impressora 3D Segurança contra incêndio
- Jogo Pixel Chaser
- IoT Gauge com Arduino, Yaler e IFTTT
- Registrador de dados do balão meteorológico Arduino
- Relógio giratório Arduino de matriz de LED único
- CoroFence - Detector Térmico🖖