


Projeto Final de Ano de Mecatrônica
Este foi meu Projeto Final de Ano de Mecatrônica na Faculdade de Engenharia Mecânica em Skopje. Seu objetivo era desenvolver um dispositivo que possibilitasse a interação de movimentos reais do braço com modelos de computador 3D. Eu integrei três campos diferentes em um dispositivo, t.e. engenharia mecânica, elétrica e informática:
- Solidworks para projetar o modelo 3D que representa os movimentos do braço.
- Cartão Arduino Mega 2560 para conectar o mundo real com o computador.
- MATLAB / Simulink para programar o controle do modelo 3D
No próximo vídeo você pode ver uma apresentação do projeto. Este é o seu conteúdo:
- Uma introdução. Aqui falo brevemente sobre a Mecatrônica como um campo de estudo que me permitiu desenvolver esse tipo de dispositivo.
- O Arduino Mega 2560. Alguns recursos básicos desta Placa Arduino que usei neste projeto.
- Modelos 3D no ambiente Simulink. Como transferir o modelo 3D do Solidworks para o Matlab/Simulink usando o SimMechanics Link.
- Desenvolvimento do dispositivo. Aqui falo sobre os componentes que usei para construir o dispositivo e como eles funcionam, assim como o Simulink Model, o programa que está rodando na placa Arduino e possibilita a interação entre o mundo real e o computador
- Você pode assistir ao vídeo a seguir ou ler o tutorial escrito abaixo.
Construindo o dispositivo
Peças usadas neste projeto
- Arduíno Mega 2560
- Acelerômetro de 3 eixos
- Potenciômetro linear x5


O acelerômetro é usado para rastrear a orientação do braço. À medida que o braço se move, os valores dos eixos X, Y e Z do acelerômetro mudam e estão sendo lidos nas entradas analógicas da placa Arduino. De acordo com eles, o modelo 3D também se move.
Os potenciômetros são usados para rastrear a posição dos dedos. Anexei uma mola (mola da caneta) a cada potenciômetro. A mola mantém o controle deslizante do potenciômetro em uma determinada posição e, à medida que os dedos se movem, o controle deslizante está sendo puxado e a resistência do potenciômetro é alterada. Esses valores estão sendo lidos nas Entradas Analógicas da Placa Arduino e de acordo com elas os dedos do Modelo 3D também se movem.
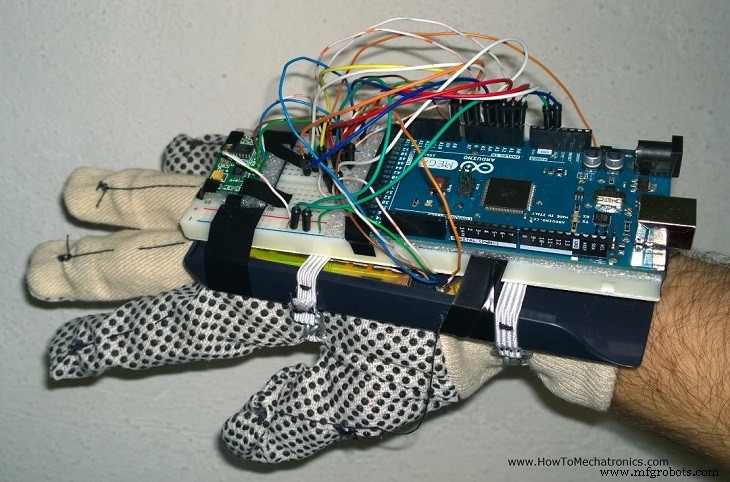
Usei uma tampa plástica de uma calculadora como base na qual prendi os cinco potenciômetros. Em cima deles coloquei a Breadboard na qual prendi a placa Arduino e o Acelerômetro usando uma fita. Na imagem abaixo você pode ver a aparência final do dispositivo.
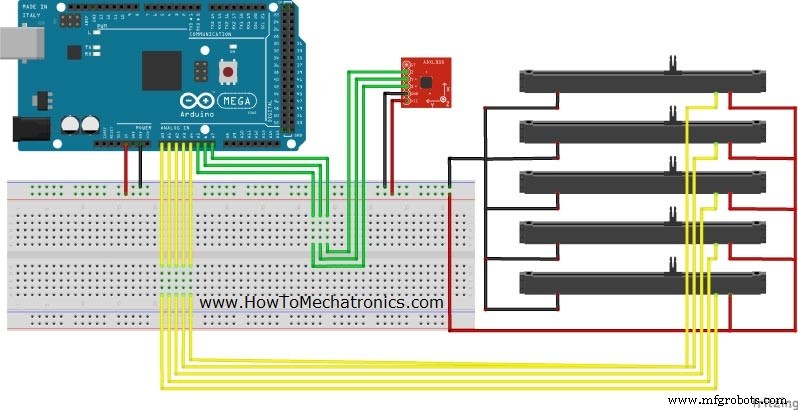
Esquema de circuito do dispositivo
O modelo 3D
O modelo 3D é uma representação de um braço humano. Primeiro, eu o modelei usando o Solidworks e depois o transferi para o Matlab/Simulink usando o SimMechanicsLink do Matworks.

O modelo MATLAB/Simulink
Antes de construir o modelo Simulink, primeiro eu tive que instalar o Arduino IO Package que consiste na biblioteca Simulink para comunicação com a placa Arduino. Também usando a IDE do Arduino tive que fazer o upload do código para a placa Arduino que vem com o pacote para habilitar a biblioteca Simulink. Aqui eu recomendo meu Tutorial para Matlab e Arduino IO Package para que você possa entender o princípio de funcionamento e ver o código.
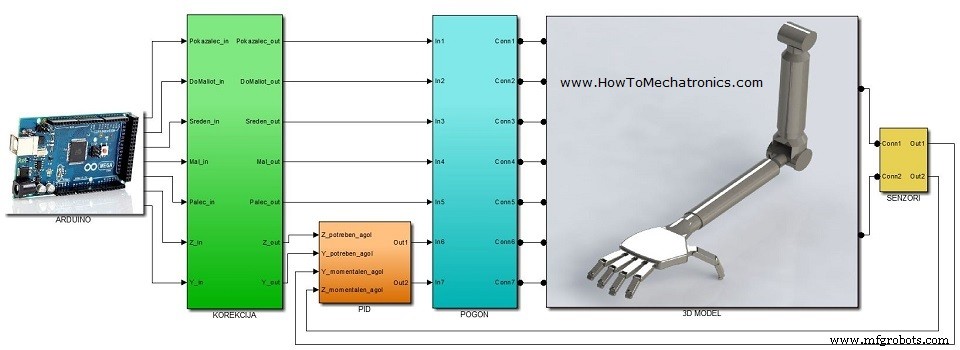
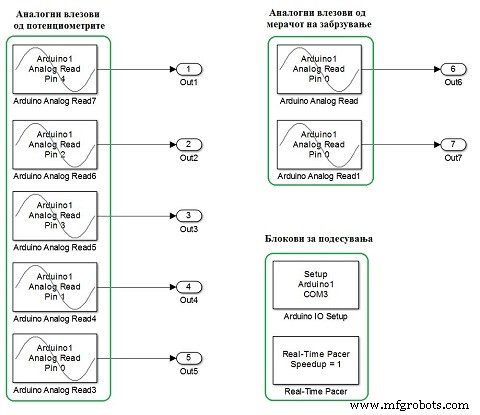
Organizei meu modelo Simulink em seis subsistemas:
- Blocos de entradas analógicas do Arduino para os valores do acelerômetro e dos potenciômetros
- Correção das leituras analógicas de acordo com minhas necessidades
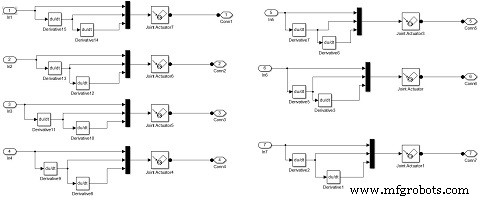
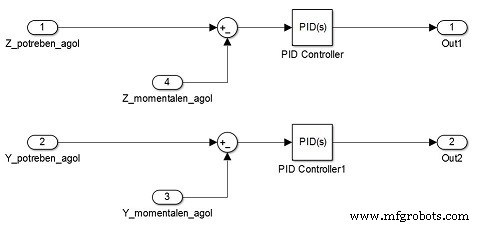
- Controle PID para obter movimentos mais suaves
- Blocos Atuadores de Juntas para acionar as juntas do modelo 3D
- O modelo 3D que foi gerado automaticamente usando o SimMechanicsLink
- Bloco de sensor comum para rastrear a posição do modelo 3D
Você pode baixar o modelo Simulink aqui:
Confira minha Extensão deste Projeto.
Reprogramei o Arduino Glove para funcionar como um Game Controller.

Processo de manufatura
- Idéias de projetos baseados em sensores para alunos do último ano de engenharia
- Smart Pen:Projeto Final para ECE5725
- Faça Monitor Ambilight usando Arduino
- Jogo Arduino Pong - Tela OLED
- Detector de frequência de áudio
- Arduino Tamagotchi Clone - Animal de estimação digital
- Manipulador de interruptor de luz sem fio
- Tech-TicTacToe
- Pistola de água com sensor de movimento
- Cronômetro de contagem regressiva do Arduino