


O que é um editor de pós-processador e como você usa um?
Você está usando um robô simulado ou uma máquina CNC... mas não está funcionando corretamente. Seria hora de usar um editor de pós-processador?
O que um pós-processador faz e por que você deseja editar um?
Se você estiver usando programação offline, é muito provável que tenha interagido com um pós-processador. Talvez você esteja usando o RoboDK para programar um robô para usinagem robótica ou outro aplicativo robótico. Ou talvez você esteja usando um sistema CAD/CAM que suporte suas máquinas CNC.
Mesmo que você não esteja ciente disso, você está usando um pós-processador sempre que usa esse sistema para programar suas máquinas físicas.
Um pós-processador é a ponte entre o ambiente simulado e sua máquina física. Ele converte as instruções simuladas em código que o robô pode usar.
Mas e se você quiser alterar como o programa gera esse código? É aí que entra um editor de pós-processador…
Por que você precisaria editar um pós-processador?
A maioria das pessoas nunca precisará editar seu pós-processador.
Se você estiver usando o RoboDK, por exemplo, basta baixar o modelo do seu robô da nossa extensa Biblioteca de Robôs. Já vinculamos cada modelo a um dos mais de 80 pós-processadores do RoboDK. Sempre que você enviar seu programa simulado para o robô físico, o pós-processador converterá o código para você “sob o capô”.
No entanto, existem algumas situações em que você precisará editar seu pós-processador.
Cada fabricante de robô usa sua própria linguagem de programação proprietária, que é executada em seu próprio controlador de robô. Cada controlador tem uma variedade de opções e recursos de configuração diferentes. O pós-processador é onde você pode definir todas essas opções de configuração personalizadas.

Por exemplo, os controladores de robô Techman incluem uma opção de segurança para solicitar uma senha ao usuário antes que ele possa reprogramar o robô. O pós-processador é onde você encontrará as opções para habilitar, desabilitar e definir essa senha. Nem todos os robôs têm essa opção.
O que é um editor de pós-processador?
Um editor de pós-processador é um software dedicado que é usado para editar arquivos de robô ou pós-processador CNC. Isso torna a edição do pós-processador mais intuitiva do que com um editor de texto padrão, que é a única opção para muitos sistemas de programação.
Um exemplo de tal software é o editor de pós-processador incluído no RoboDK.
Os pós-processadores RoboDK são escritos na linguagem de programação Python. Para cada um dos pós-processadores suportados, há uma biblioteca compilada (um arquivo PYC) e um script Python editável que contém todas as propriedades de configuração.
Esses arquivos de configuração podem ser editados com qualquer editor de texto padrão se você quiser controle total da configuração. No entanto, o RoboDK também oferece um editor de pós-processador mais intuitivo. Isso permite que você altere os parâmetros do seu robô escolhido sem ter que se envolver no código.
Como editar um pós-processador de maneira fácil
No RoboDK, a maneira mais fácil de editar seu pós-processador é usar nosso editor de pós-processador. Ele fornece informações sobre quando é mais provável que você use cada um dos parâmetros e valores recomendados. Com esta ferramenta, você cobrirá a grande maioria dos casos de uso do seu robô.
Cada pós-processador contém uma lista de propriedades de configuração. Estes irão variar dependendo do fabricante do seu robô.
Alguns pós-processadores incluem muito poucas propriedades. Por exemplo, o pós-processador para robôs Mecademic inclui apenas uma propriedade (o tipo de arquivo do arquivo de programa).
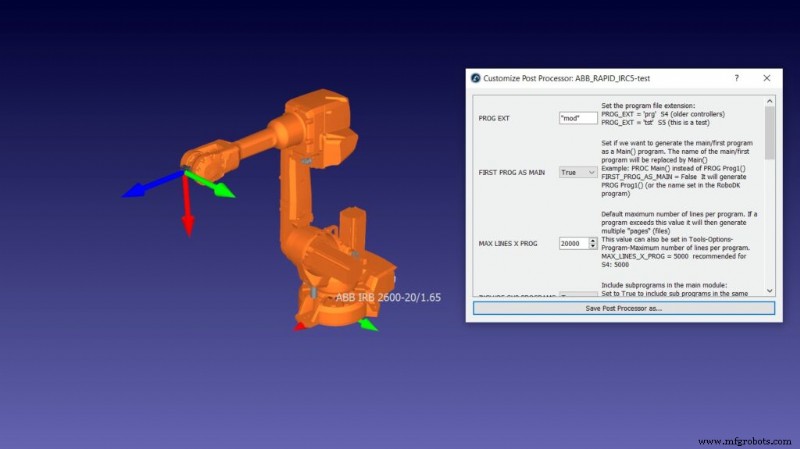
Outros pós-processadores incluem muitas propriedades. Por exemplo, o pós-processador ABB_RAPID_IRC5 para robôs ABB tem 16 propriedades, desde a velocidade padrão do robô até sinalizadores de configuração para toca-discos externos.
Seja qual for o robô que você está usando, a maneira mais simples de editar seu pós-processador é carregá-lo no editor RoboDK. Você poderá ver todas as propriedades de configuração disponíveis e decidir quais são as mais adequadas para sua aplicação.
Guia de edição de pós-processador simples
Ao abrir o editor de pós-processador, você será saudado por uma lista das propriedades disponíveis.
Como você decide quais propriedades ajustar e quais valores definir?
Vamos usar um exemplo específico para mostrar o processo… Vamos olhar para o pós-processador AUBO para a linha de robôs colaborativos da empresa.
O pós-processador AUBO contém as seguintes propriedades:
- PROG EXT — Esta é a extensão do programa e está incluída em muitos pós-processadores. Ele especifica o tipo de arquivo que o RoboDK irá gerar.
- SPEED MS e SPEED RAD — Especifica a velocidade em metros por segundo e radianos para movimentos circulares.
- ACCEL MSS e ACCEL RADSS — Especifica a aceleração do robô em metros por segundo ao quadrado ou radianos por segundo ao quadrado para acelerações circulares.
Como você pode ver, as propriedades geralmente são claras apenas a partir de suas convenções de nomenclatura. No entanto, onde a finalidade de uma propriedade não é imediatamente óbvia, geralmente há uma descrição dela no editor e valores frequentemente recomendados também.
Se você ainda não conseguir descobrir a finalidade de uma propriedade específica, poderá encontrar informações no manual do seu robô ou fazer uma pergunta no fórum do RoboDK.
Onde encontrar o novo editor de pós-processador RoboDK
Começou a editar o pós-processador do seu robô com o editor RoboDK!
Você pode encontrar informações sobre como ativar e usar o editor em nossa página de documentação.
Dúvidas? Conte-nos nos comentários abaixo ou participe da discussão no LinkedIn, Twitter, Facebook, Instagram ou no Fórum RoboDK. Além disso, confira nossa extensa coleção de vídeos e inscreva-se no canal RoboDK no YouTube
Use o RoboDK para programação de robótica embarcada fácil
Você deve começar a usar o corte a laser robótico?
Robô industrial
- Software de manutenção preventiva de decodificação:O que ele faz e como usá-lo
- Comissionamento remoto:por que você precisa e como usá-lo
- Desempenho efetivo total do equipamento:O que é TEEP e como você pode usá-lo para melhorar a programação
- Curva P-F:O que é e como usá-la na manutenção
- O que é uma queda de pressão e como evitá-la?
- O que é um compactador e como escolher o correto?
- Embreagens industriais:o que são e como você as usa?
- Microcontrolador PIC18:o que é e como usá-lo
- O que é uma máquina de ferreiro e por que você precisa de uma?
- O que é um designador de referência e como o usamos na montagem?