


Pós-processadores de robôs:tudo o que você precisa saber
Não sabe qual pós-processador escolher? Aqui estão 5 etapas para escolher o pós-processador de robô perfeito.
Os pós-processadores são a ponte entre o software de programação offline e seu robô.
Se você escolher o pós-processador certo, seu programa funcionará imediatamente — o robô real se moverá exatamente como na simulação. No entanto, se você escolher o pós-processador errado, terá dificuldades - o robô pode se mover de forma irregular, pode se mover na direção errada ou pode não se mover.
O RoboDK oferece vários pós-processadores diferentes para você escolher. Vale a pena se familiarizar com o funcionamento dos pós-processadores, como escolher o correto e como personalizar ou criar seu próprio pós-processador se os fornecidos não forem exatamente adequados para você.
Este artigo lhe dirá tudo o que você precisa saber sobre pós-processadores de robôs no RoboDK.
O que é um pós-processador?
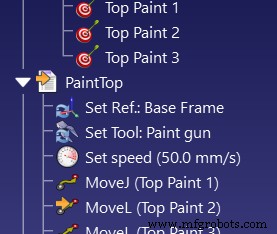
A maioria dos programas de robô contém os mesmos comandos básicos, que são usados repetidamente. Os três mais comuns são:
- Mover junta — Isso move o robô para um ponto no espaço enviando as articulações do robô para a posição desejada da maneira mais rápida possível, o que é útil ao se mover pelo espaço livre.
- Mover linear — Isso move o robô da posição atual para um ponto no espaço seguindo uma linha precisa, o que é útil ao mover para pegar um objeto, pintar, etc.
- Definir velocidade — Isso define a velocidade do efetor e/ou articulações do robô.
O software de programação offline cria programas usando uma versão generalizada desses (e outros) comandos que podem ser aplicáveis a qualquer robô.
Os robôs falam idiomas diferentes
O problema é que cada fabricante tem uma maneira diferente de programar comandos em seus robôs. Muitos fabricantes têm sua própria linguagem de programação personalizada e alguns até usam comandos ligeiramente diferentes para diferentes versões de seus controladores.
Por exemplo, aqui está como os três comandos listados acima são expressos para diferentes controladores de robô. Entre parênteses, também mostrei o número mínimo de parâmetros e valores necessários para controlar um robô 6DoF:
| Robô | Movimentação conjunta | Movimento linear | Definir velocidade | Arredondamento de caminho |
| ABB IRC5 | MoverJ (4) | MoverL (4) | speeddata(4) | zonedata(4) |
| Fanuc RJ3 | J (2) | L (2) | velocidade (1) | CNT (1) |
| Kawasaki | JMOVE (1) | LMOVE (1) | VELOCIDADE (1) | PRECISÃO (1) |
| KUKA KRC | PTP (1) | LIN/SPL (1) | $VEL.CP (1) | $APO.CDIS (1) |
| Motoman JBI | MOVJ (2) | MOVL (2) | VJ/V (1) | PL (1) |
| Robôs universais | moverj (1) | mover/mover (1) | v(1) | r (1) |
Como você pode ver, cada comando é semelhante entre cada tipo de robô. No entanto, há uma diferença na redação e na quantidade de informações necessárias para definir cada instrução.
Sem programação offline e pós-processadores, você teria que aprender uma linguagem de programação completamente nova toda vez que programasse um novo tipo de robô. Isso diminui significativamente a programação do robô.
Os pós-processadores facilitam
Os pós-processadores funcionam traduzindo os comandos em um programa específico para o seu modelo de robô.
Com o RoboDK, você não precisa aprender uma linguagem de programação para colocar seu robô em movimento. Os pós-processadores fornecidos geralmente são suficientes para gerar código utilizável e livre de bugs para mais de 30 marcas de robôs.
O pós-processador também gera todo o código de iniciação necessário e definições de variáveis, que geralmente são um incômodo para definir na programação regular baseada em texto.
5 passos para escolher o pós-processador perfeito
RoboDK vem com mais de 40 pós-processadores. Você tem que escolher o pós-processador certo para o seu controlador de robô.
Como você escolhe entre eles?
Se você usou um dos robôs da nossa Biblioteca de Robôs, verá que um pós-processador já está selecionado como padrão. Muitas vezes, isso pressupõe que você esteja usando o controlador mais recente (ou padrão) para esse robô. No entanto, você pode achar que precisa selecionar outro se a postagem padrão não atender às necessidades de seu aplicativo ou configuração.

1. Escolha o pós-processador para sua marca de robô
Geralmente, é melhor tentar primeiro o pós-processador padrão ou mais básico.
Algumas marcas de robôs têm apenas uma opção fornecida por padrão no RoboDK, por exemplo, Mecademic, Kawasaki, CLOOS etc. Nesse caso, sua escolha é muito simples.
2. Escolha o pós-processador para o seu controlador
Algumas marcas de robôs possuem diferentes pós-processadores para diferentes controladores ou versões de sua linguagem de programação. Por exemplo, a Denso tem um pós-processador para seus controladores RC7 mais antigos e um para seus controladores RC8 mais recentes, pois entre esses modelos eles passaram da programação na linguagem de programação PAC para a programação em PacScript.
Use o pós-processador para seu controlador específico, se houver um disponível. Se não houver opção para o seu controlador específico, tente a que estiver mais próxima do número da versão do seu controlador.
3. Escolha o pós-processador para seu aplicativo
Algumas marcas de robôs têm vários pós-processadores diferentes. KUKA tem 10!
Alguns dos pós-processadores extras são para aplicações ou configurações específicas. Por exemplo, existem 5 pós-processadores para o controlador KUKA KRC2. Dois deles são para aplicações que usam o complemento de fresamento CamRob ou o controle CNC KUKA, que permite ter milhares de linhas de código em um arquivo de programa (adequado para usinagem de robôs). Um é especificamente para aplicações de soldagem a arco. Da mesma forma, há um pós-processador UR que integra garras Robotiq.
Se houver um pós-processador para seu controlador que seja correto para sua aplicação ou configuração específica, use-o. No entanto, se não houver nenhum para sua aplicação, basta usar o pós-processador básico para sua marca e controlador.
4. Escolha o pós-processador que você pode atualizar facilmente
Às vezes, o programa gerado pelo RoboDK não será exatamente o certo para sua aplicação. Você pode querer adicionar linhas extras de código para estender a funcionalidade. Isso é muito fácil de fazer se você estiver um pouco familiarizado com a linguagem de programação do seu robô.
Alguns dos pós-processadores são fornecidos para facilitar a alteração e atualização do código gerado.
Por exemplo, o KUKA KRC2 possui opções que geram um arquivo DAT. Estas são características interessantes do controlador KUKA. Nesta configuração, as posições são armazenadas como variáveis em um arquivo DAT separado, o que às vezes pode facilitar a atualização do código, pois você só precisa alterar as variáveis para alterar as posições.
Do mesmo modo, existem dois pós-processadores Siemens Sinumerik:um onde as posições são fornecidas em milímetros e outro onde são fornecidas em polegadas.
Escolha o pós-processador que facilite ao máximo a atualização do código do robô, caso seja necessário.
5. Crie ou personalize um pós-processador
Em algumas circunstâncias, você pode precisar escrever seu próprio pós-processador, como quando estiver usando seu robô em uma configuração exclusiva.
Você também pode personalizar um pós-processador existente para sua configuração ou aplicação específica.
É muito fácil escrever pós-processadores personalizados no RoboDK, pois todos eles são programas Python e são escritos em um formato semelhante.
Você pode ver um tutorial simples que mostra como criar ou atualizar um pós-processador neste vídeo.
Confira a página de pós-processador em nossa documentação para obter mais detalhes.
Que dúvidas você tem sobre pós-processadores? Conte-nos nos comentários abaixo ou participe da discussão em LinkedIn , Twitter , Facebook ou Instagram .
Robô industrial
- Computação em nuvem:tudo que você precisa saber
- Contêineres vs. sem servidor; Tudo que você precisa saber!
- Manutenção terceirizada em resumo:tudo o que você precisa saber
- Tudo o que você precisa saber sobre dispersões de pigmento
- Estratégia de planejamento de capacidade - tudo que você precisa saber
- Tudo o que você precisa saber sobre IoT em manutenção
- 9 passos para forjar uma faca:tudo o que você precisa saber
- Tudo o que você precisa saber sobre desenhos técnicos
- Tudo o que você precisa saber sobre fundição de metal
- Reparos de embreagem industrial:tudo o que você precisa saber