


As 10 principais tarefas para programação offline
Sua tarefa é adequada para programação offline? Analisamos as 10 principais tarefas robóticas que são possíveis com software de programação offline.
Uma preocupação comum sobre qualquer nova tecnologia está contida na pergunta "Mas isso funcionará para minha situação específica?"
A programação offline não é diferente. Embora as pessoas vejam os benefícios disso rapidamente, às vezes elas se preocupam que não seja aplicável à sua tarefa específica. Entendemos a preocupação deles. O negócio de cada um é único e pode ser difícil dizer se uma tecnologia como programação offline será a mais adequada para você.
No entanto, mesmo que sua situação seja única, existem semelhanças entre seu aplicativo de robô e outros que vemos o tempo todo. A programação offline pode ser usada para muitas tarefas robóticas.
Neste artigo, explicamos quais fatores determinam se você pode usar programação offline e listamos nossas 10 principais tarefas no RoboDK.
O que determina se uma tarefa pode usar programação offline
Se você pode realizar uma tarefa com um robô, quase certamente pode programá-la usando programação offline. No entanto, existem alguns fatores que determinam o quão fácil (ou difícil) será realizar a programação.
Cinco fatores importantes são:
- Funcionalidade do software — Nem todo software de programação offline é igual. Alguns pacotes são fornecidos por fabricantes de robôs específicos, portanto, estão vinculados a essas marcas e têm suporte variado para algumas tarefas.
- Compatibilidade do robô — Alguns fabricantes não fornecem software de programação offline, o que é um problema se você confiar no software do fabricante. Para obter dicas sobre como avaliar seu robô, consulte nosso artigo:A programação offline funcionará com meu robô?
- Disponibilidade do modelo de robô — Você precisa ter certeza de que seu modelo de robô está disponível para o software de programação offline que está usando. Consulte nossa Biblioteca de robôs para mais de 300 modelos de mais de 30 fabricantes de robôs.
- Nível de especialização — Alguns tipos tradicionais de programação offline (por exemplo, na indústria automotiva) envolvem ferramentas de software complexas que não são fáceis de usar. Softwares como o RoboDK, por outro lado, facilitam muito a programação do seu robô offline. Como resultado, você precisa de muito menos experiência do que poderia ter no passado.
A maioria desses fatores pode ser superada selecionando o software de programação offline correto.
10 principais tarefas para programação offline
Muitas vezes vemos pessoas implementando tarefas iguais ou semelhantes usando programação offline. Para facilitar sua vida, reunimos uma lista das tarefas mais comuns, juntamente com instruções sobre como implementá-las usando programação offline.
Você pode encontrar simulações interativas e tutoriais de como programar essas tarefas no RoboDK em nossa página de exemplos.
1. Usinagem Robô
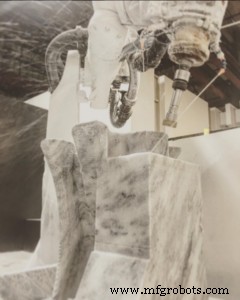
No passado, fresamento e usinagem automatizados costumavam ser feitos com máquinas CNC. Se os robôs estivessem envolvidos, eles geralmente eram usados apenas para cuidar de máquinas.
Hoje em dia, no entanto, os robôs estão começando a ser usados para a usinagem em si. Maior precisão de robôs industriais e programação offline mais intuitiva significa que você pode facilmente transformar o código CNC em instruções do robô.
O RoboDK inclui uma ferramenta de usinagem de robô dedicada em seu menu Utilitários. Veja uma demonstração neste link:RoboDK Machining.
2. Escolha e coloque
Possivelmente a tarefa robótica mais popular é pegar e colocar, que envolve mover objetos de uma parte da célula de trabalho para outra. Essas tarefas são muito fáceis de programar usando programação offline. É possível programar uma tarefa simples de pegar e colocar em menos de 15 minutos, como demonstrei em um artigo anterior.
Veja uma demonstração neste link:RoboDK Pick and Place.
3. Pintura de robô
Se você pedisse a qualquer membro do público para citar algumas tarefas robóticas industriais, aposto que a pintura robótica estaria no topo da lista. A pintura é uma das aplicações robóticas mais típicas e é fácil de fazer usando programação offline. O software pode gerar os caminhos da ferramenta em minutos.

Veja uma demonstração neste link:RoboDK Painting.
4. Soldagem por pontos de robô
A programação offline tem sido usada há muito tempo para gerar programas para soldagem a ponto. No entanto, no passado, isso levava muitas horas de simulação árdua e exigia um programador especializado. Com o software mais recente, os programas de soldagem a ponto podem ser gerados facilmente, sem erros.
Veja uma demonstração neste link:RoboDK Spot Welding.
5. Impressão 3D
Eu diria que a impressão 3D é uma das tecnologias marcantes do século XXI. Embora já exista há algum tempo, as aplicações de impressão 3D explodiram na última década. Um dos desenvolvimentos recentes mais interessantes é usar os próprios robôs como impressoras 3D. A programação offline torna isso muito simples de conseguir.

O RoboDK inclui uma ferramenta de impressão 3D dedicada em seu menu Utilitários. Veja uma demonstração neste link:RoboDK 3D Printing.
6. Seleção do transportador
Os transportadores são usados em muitas indústrias para transportar objetos entre diferentes processos de valor agregado. No entanto, muitas vezes são difíceis de integrar com um robô. Se o seu software de programação offline os suporta (como o RoboDK faz), você pode economizar muito tempo de integração online.

Veja uma demonstração neste link:RoboDK Conveyor Picking.
7. Inspeção Automatizada
A inspeção usando visão de máquina tornou-se uma aplicação popular para robôs. As razões para isso são claras – a inspeção manual é uma tarefa árdua que aumenta à medida que a produtividade aumenta. A programação offline de visão de máquina nunca pode substituir totalmente a programação online (já que você precisa treinar as câmeras usando imagens reais), mas pode ajudar a acelerar o processo de integração.

Veja uma demonstração neste link:RoboDK Automated Inspection .
8. Desenho
Desenhar pode soar como uma atividade frívola para um robô. No entanto, tem muitas aplicações úteis. Os robôs podem ser usados para desenhar padrões de glacê em bolos, cortar contornos artísticos usando ferramentas de fresagem e pintar com um estilo de caligrafia em produtos. A programação offline facilita a conversão de imagens SVG (o padrão para imagens vetoriais) em caminhos de robôs.
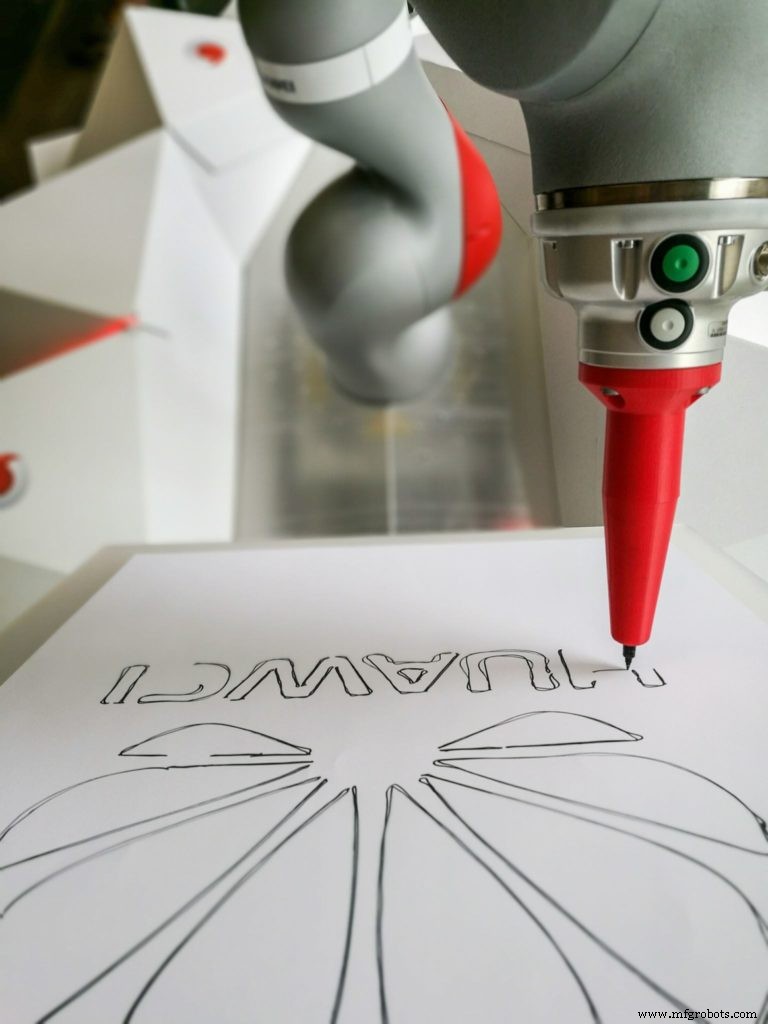
Veja uma demonstração neste link:RoboDK Drawing.
9. Integrando um Eixo Externo
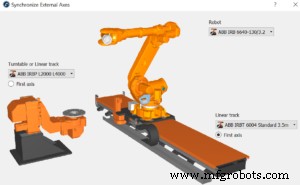
Esta não é realmente uma “tarefa” em si. É mais como uma técnica para melhorar a gama de tarefas que você pode realizar com o robô. Eixos externos permitem estender o espaço de trabalho do robô para tarefas como pintura, soldagem a ponto, inspeção, etc. Eles são basicamente um ou dois graus de liberdade extras adicionados ao robô. O único problema é que eles precisam ser sincronizados com o robô. Com programação offline, essa sincronização é fácil.
O RoboDK inclui uma ferramenta de sincronização dedicada para eixos externos em seu menu Utilitários. Veja uma demonstração neste link:RoboDK Machining With External Axis.
10. Qualquer coisa que um robô pode fazer... OLP também pode fazer
Mesmo que sua tarefa não esteja listada aqui, é provável que você possa realizá-la com programação offline. Se você não tiver certeza, sinta-se à vontade para entrar em contato conosco e nos perguntar sobre sua tarefa específica ou postar um comentário abaixo.
A melhor maneira de começar a usar a programação offline é simplesmente fazer o download do software e experimentá-lo por si mesmo. Baixe uma cópia de avaliação gratuita neste link:Baixe o RoboDK.
Robô industrial
- As 7 principais tendências de fabricação para 2020
- Os 3 principais materiais mais resistentes para fixadores de plástico
- Os 7 principais podcasts para desenvolvedores de IoT
- 10 principais fluxos de trabalho para fabricantes
- As 5 principais vantagens do SaaS para fabricantes
- 7 principais livros para engenharia eletrônica
- Como escolher um projeto para automação
- Dicas para soldar alumínio
- Programação CNC para Operadores CNC
- Principais razões para falha do sistema hidráulico