


10 maneiras úteis de personalizar a interface do RoboDK
Cada usuário de robô tem gostos diferentes para programação. Aqui estão 10 ótimas maneiras de personalizar a interface do RoboDK para se adequar a você.
Você já tentou fazer o café da manhã na cozinha de outra pessoa?
É um pesadelo, não é!?
Você não sabe onde estão os talheres, a torradeira tem um conjunto confuso de botões e a geladeira parece mais difícil de navegar do que as montanhas de Mordor.
Isso é exatamente o que pode parecer quando você tenta usar um software de programação diferente do que você normalmente usa. A interface simplesmente não parece correta e pode demorar um pouco para se acostumar com ela.
Mas, com o RoboDK, você não precisa se comprometer. A interface é extremamente personalizável. Existem opções para alterar uma impressionante variedade de aspectos diferentes para atender às suas necessidades.
Aqui estão 10 maneiras extremamente úteis de personalizar a interface do RoboDK para suas preferências.
1. Mudar para o modo escuro
Anos atrás, quando eu estava na universidade, um dos meus colegas me contou sobre os benefícios de mudar para o “modo escuro” quando você está programando.
A maioria dos pacotes de software usa um fundo branco com texto preto. O modo escuro inverte todas as cores para que sejam o oposto, ou seja, texto claro em um fundo traseiro. Muitas pessoas dizem que o modo escuro reduz a fadiga ocular (e havia algumas evidências de que reduzia a cintilação em monitores CRT antigos).
Existem teorias conflitantes sobre se o modo escuro realmente é melhor para seus olhos hoje em dia com telas modernas - é muito melhor descansar os olhos regularmente durante a programação - mas podemos dizer uma coisa com certeza:algumas pessoas adoram o modo escuro.
Se você é fã do modo escuro, o RoboDK agora o ativará automaticamente quando você definir seu sistema operacional para o modo escuro. Você também pode personalizar isso nas opções de exibição (selecione Ferramentas> janela Opções> guia Exibir ).
Com telas OLED (embora não LCD), o modo escuro também pode reduzir a energia usada pela tela, o que é ótimo se você estiver usando o RoboDK com bateria.
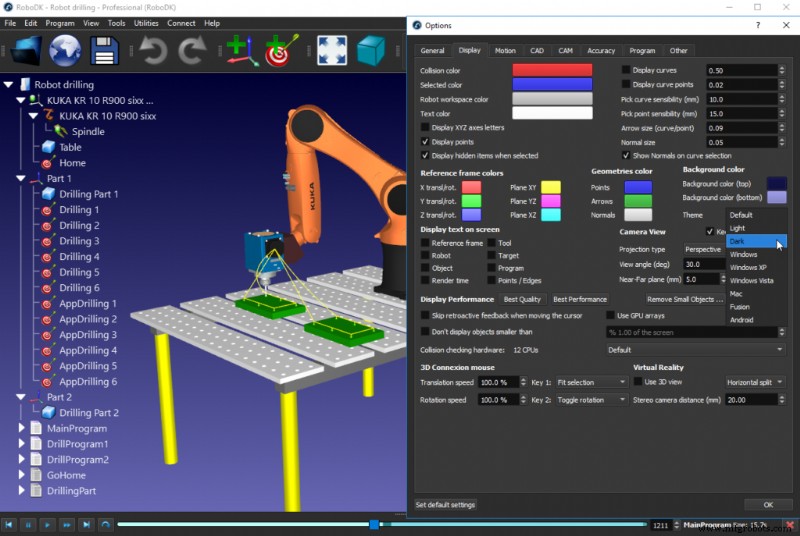
2. Escolha todas as cores
Mesmo se você não estiver usando o modo escuro, poderá alterar quase todas as cores do RoboDK para atender às suas preferências.
As cores que você pode alterar incluem:cor da colisão, cor do texto, cor dos pontos, cor do plano de fundo, cores do quadro de referência e a cor do item selecionado.
Tudo isso pode ser alterado em Ferramentas> janela Opções> guia Exibir .
3. Combine seu modo de mouse favorito
Como usuário de vários programas gráficos 3D, sei como é irritante quando você muda para um novo programa e o modo do mouse é diferente. De repente, para cima se torna baixo e para baixo se transforma em cima, a função da roda do mouse muda e as funções do botão se invertem.
O RoboDK permite que você altere o modo do mouse para o modo que preferir através do menu Ferramentas> janela Opções> guia Geral .
4. Combine seu pacote CAD/CAM automaticamente
Se você integrou seu pacote CAD/CAM favorito ao RoboDK, usando um de nossos plugins, você pode fazer com que o RoboDK corresponda automaticamente ao estilo visual e modo de mouse para esse programa.
Por exemplo, se estiver usando o plug-in do SolidWorks, você pode definir o “tema do SolidWorks” no menu do plug-in.
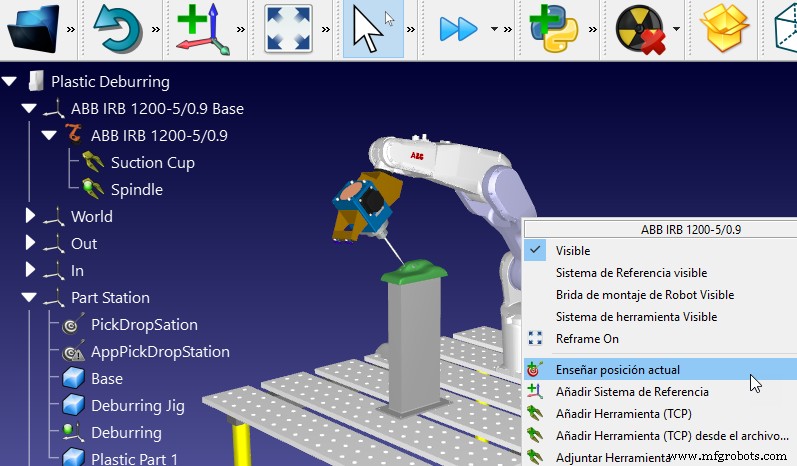
5. Alterar o idioma
É sempre mais fácil navegar em um novo software se os menus estiverem escritos em seu idioma nativo.
No RoboDK, você pode alterar o idioma facilmente através do Menu Ferramentas> Idioma.
No momento da escrita, ele contém suporte para 16 dos idiomas mais comuns. Nem todos os idiomas foram totalmente traduzidos, mas as principais funcionalidades estão representadas.
6. Mude a perspectiva
Programas que usam gráficos 3D sofrem de um problema interessante. Às vezes, você deseja visualizar os objetos como faria no mundo real (com um efeito de perspectiva realista). Outras vezes, você deseja que a vista reflita as dimensões com mais precisão, mesmo que o modelo pareça menos realista.
Você pode alternar entre as duas visualizações (perspectiva e ortográfica) por meio do menu Ferramentas> janela Opções> guia Exibir.
7. Mudar formato do número
Todos os países do mundo podem ser divididos em dois grupos:os que usam ponto (.) para separar um número decimal e os que usam vírgula (,).
Por exemplo:
- No Japão, os números são escritos neste formato: 1.234.567,89 — Este formulário é usado por cerca de 41% dos países do mundo.
- Na Suécia, os números são escritos neste formato:1.234.567,89 — Este formulário é usado por cerca de 55% dos países do mundo.
- Finalmente, no Canadá, os números são escritos em ambas as formas, dependendo do contexto. — Este é o caso em cerca de 4% dos países do mundo.
Você pode alterar a localidade do número do RoboDK através do menu Ferramentas> janela Opções> guia Geral.
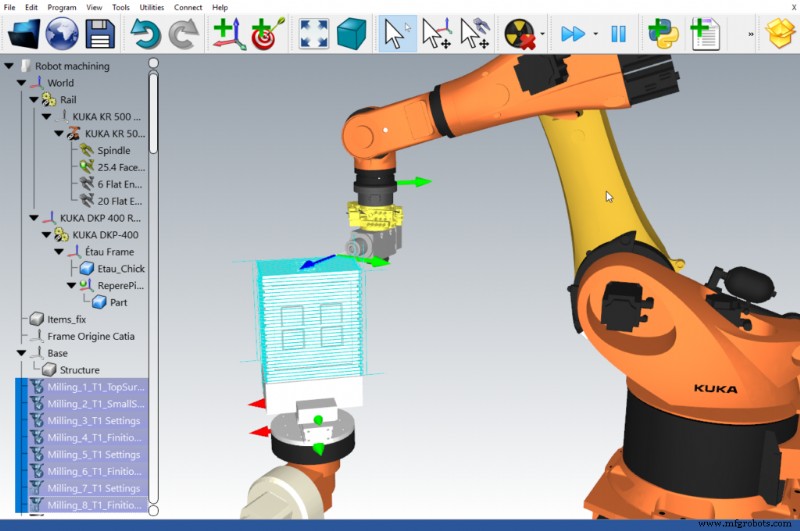
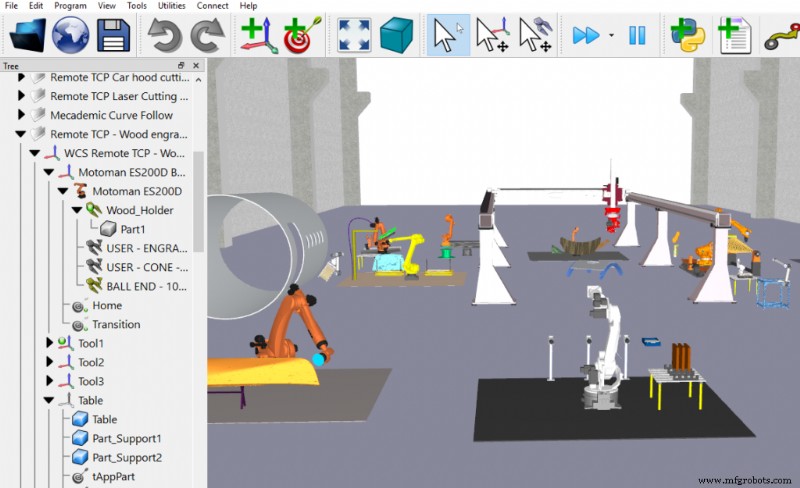
8. Definir tamanho e estilo da árvore
A árvore do programa é visível à esquerda da janela do RoboDK. Ele contém todos os objetos e instruções de programa para a simulação atual.
Às vezes, você desejará diminuir o zoom da árvore do programa para obter uma visão mais completa de todos os itens dentro dela. Outras vezes, você desejará aumentar o zoom novamente.
Você pode alterar o tamanho da árvore do programa mantendo pressionada a tecla Ctrl tecla e girando a roda do mouse.
Você também pode alterar o plano de fundo da árvore de transparente para encaixado e vice-versa através do menu Exibir> Mostrar árvore dentro da janela.
9. Otimizar para velocidade ou desempenho
RoboDK funciona muito bem em computadores de baixo desempenho. No entanto, você pode querer alterar algumas configurações de exibição para reduzir a carga computacional.
Existem 3 opções que envolvem o desempenho de exibição que você pode encontrar no menu Ferramentas> janela Opções> guia Exibir . Eles permitem que você personalize a exibição para Melhor qualidade ou Melhor desempenho. Ou você pode usar Simplificar Objeto para reduzir o número de vértices em um modelo 3D.
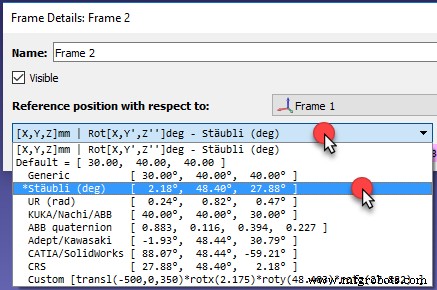
10. Escolha o modo de ângulo de Euler
Os ângulos de Euler são o método usado em robótica para representar localizações e orientações no espaço. De forma irritante, todo fabricante de robô e pacote CAD/CAM usa uma convenção ligeiramente diferente para ângulos de Euler para representar a localização de um sistema de coordenadas (também conhecido como pose) em relação a outro sistema de coordenadas.
O RoboDK suporta as convenções de ângulo Euler de todos os principais fabricantes de robôs. Você pode alterar a convenção de cada usado através das configurações de cada sistema de coordenadas ou as configurações padrão em menu Ferramentas> janela Opções> guia Geral.
Para uma introdução completa aos ângulos de Euler, confira nosso artigo Robot Euler Angles:The Essential Primer.
Quaisquer que sejam suas preferências, RoboDK tem uma opção para você!
Como você gostaria de personalizar o RoboDK? Conte-nos nos comentários abaixo ou participe da discussão no LinkedIn, Twitter, Facebook, Instagram ou no RoboDK Forum.
5 maneiras como a fabricação robótica pode ajudar em um mundo de crise
RoboDK comemora 5 anos de evolução bem-sucedida
Robô industrial