


Indo mais rápido e mais longe com o Fieldbus
Especialistas da indústria, como PROCENTEC, mostram um crescimento constante na adoção da tecnologia fieldbus baseada em RS-485 (PROFIBUS ® ) e rápido crescimento para Ethernet Industrial (PROFINET). Em 2018, havia 61 milhões de nós PROFIBUS fieldbus instalados em todo o mundo, com a automação de processos PROFIBUS (PA) crescendo 7% ano a ano. A base instalada do PROFINET é de 26 milhões de nós, com 5,1 milhões de dispositivos instalados somente em 2018. 1
Com este crescimento constante na adoção do fieldbus RS-485 e na Indústria 4.0 acelerando a implantação de fábricas conectadas de forma inteligente, garantir que as tecnologias fieldbus sejam otimizadas ajuda a habilitar um sistema inteligente. As tecnologias de fieldbus otimizadas devem equilibrar cuidadosamente a robustez EMC e a transmissão confiável de dados.
A transmissão de dados não confiável reduzirá o desempenho geral do sistema. Em aplicações de controle de movimento, o fieldbus é normalmente usado para controle de posição de malha fechada de motores de eixo único ou multieixo. Altas taxas de dados e cabos longos são comuns, conforme mostrado na Figura 1. Se o controle de posição não for confiável, então a degradação do desempenho em termos práticos significa menor rendimento da máquina e produtividade reduzida da fábrica. Em aplicações de infraestrutura sem fio, o fieldbus é normalmente usado para controle de inclinação / posição da antena, onde a transmissão precisa de dados é crítica. Em ambos os aplicativos de controle de movimento e infraestrutura sem fio, vários níveis de proteção EMC são necessários, conforme mostrado na Figura 1. Os aplicativos de controle de movimento normalmente operam em ambientes com ruído elétrico, o que pode causar erros de dados. Em comparação, a infraestrutura sem fio deve ser protegida contra raios indiretos prejudiciais em um ambiente exposto.
Para essas aplicações exigentes, um exame cuidadoso do desempenho de temporização do transceptor RS-485 em cabos é necessário para garantir um sistema confiável, bem como a caracterização EMC. Este artigo apresenta alguns conceitos-chave de sincronização e cabo de comunicação do sistema; fornece indicadores-chave de desempenho, incluindo clock e distribuição de dados e capacidade de direcionamento de cabos; e demonstra benefícios para aplicações industriais usando transceptores RS-485 de próxima geração.
Desempenho de tempo
Ao considerar a transmissão de dados confiável em altas taxas de dados em comprimentos de cabos longos, os conceitos de desempenho de temporização, como jitter e skew - frequentemente associados à sinalização diferencial de baixa tensão (LVDS) - tornam-se importantes para RS-485. Jitter e skew adicionados pelo transceptor RS-485 e pelo cabo do sistema precisam ser examinados.
clique para ampliar a imagem
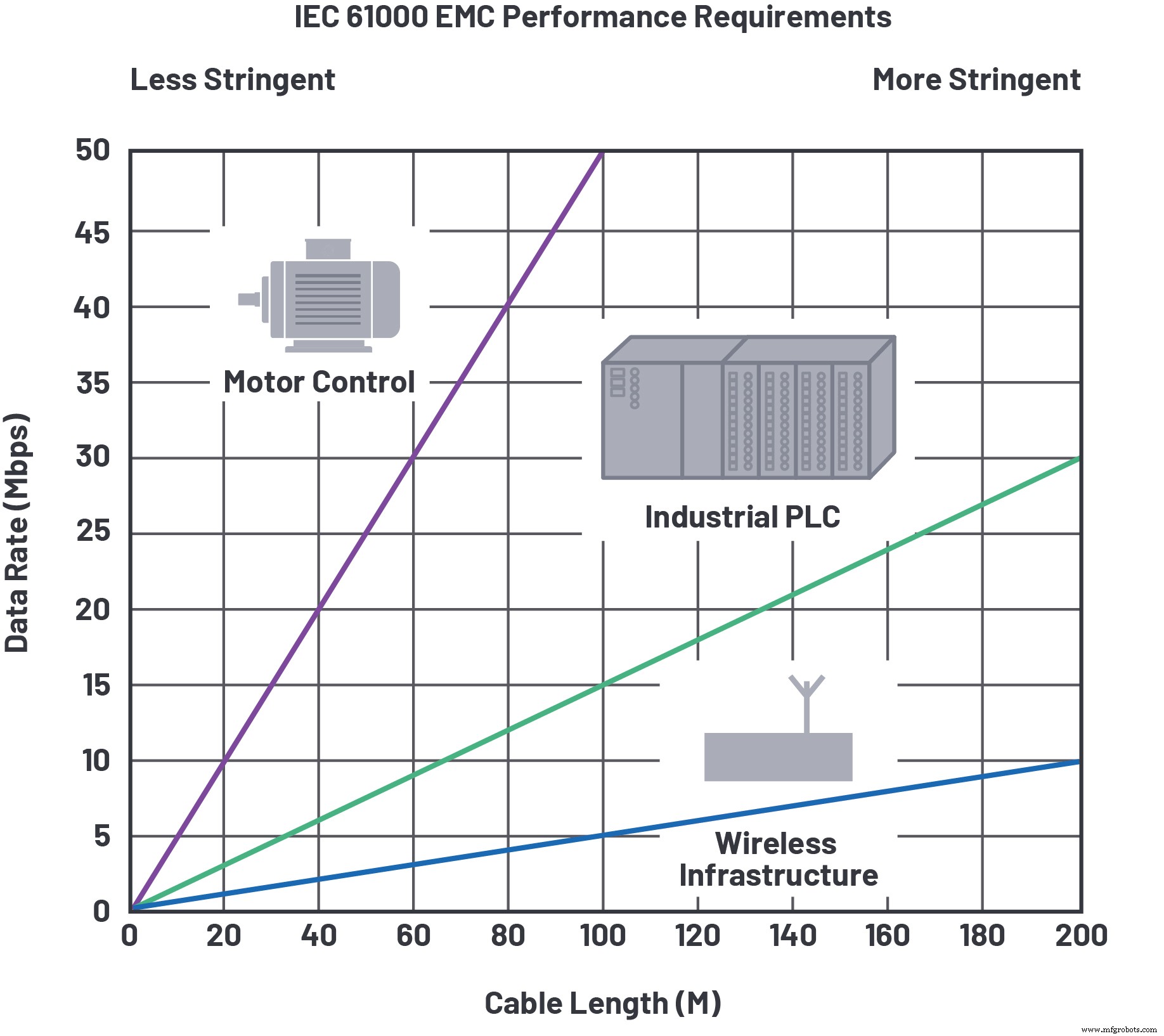
Figura 1. EMC, taxa de dados e comprimento do cabo para RS-485. (Fonte:Dispositivos analógicos)
Tremulação e inclinação
O jitter pode ser quantificado como um erro de intervalo de tempo, especificamente a diferença entre o tempo de chegada esperado de uma transição de sinal e quando essa transição chega na prática. Em um link de comunicação, existem vários contribuidores para o jitter. Cada contribuidor pode ser amplamente descrito como de natureza aleatória ou determinística. O jitter aleatório pode ser identificado a partir de sua distribuição gaussiana e se origina do ruído térmico e do ruído disparado de banda larga dentro de um semicondutor. Jitter determinístico resulta de fontes dentro do sistema de comunicação; por exemplo, distorção do ciclo de trabalho, diafonia, fontes de ruído externo periódico ou interferência intersimbólica. Em sistemas de comunicação que usam o padrão RS-485, as taxas de dados estão abaixo de 100 MHz, onde esses efeitos de jitter determinísticos dominam os efeitos aleatórios.
O valor do jitter pico a pico é uma medida útil do jitter total do sistema resultante de fontes determinísticas. O jitter pico a pico pode ser examinado no domínio do tempo sobrepondo um grande número de transições de sinal na mesma tela (comumente conhecido como diagrama de olho). Isso pode ser alcançado em uma tela de osciloscópio usando persistência infinita ou com um software de decomposição de jitter embutido do osciloscópio, conforme mostrado na Figura 2.
2
clique para ampliar a imagem
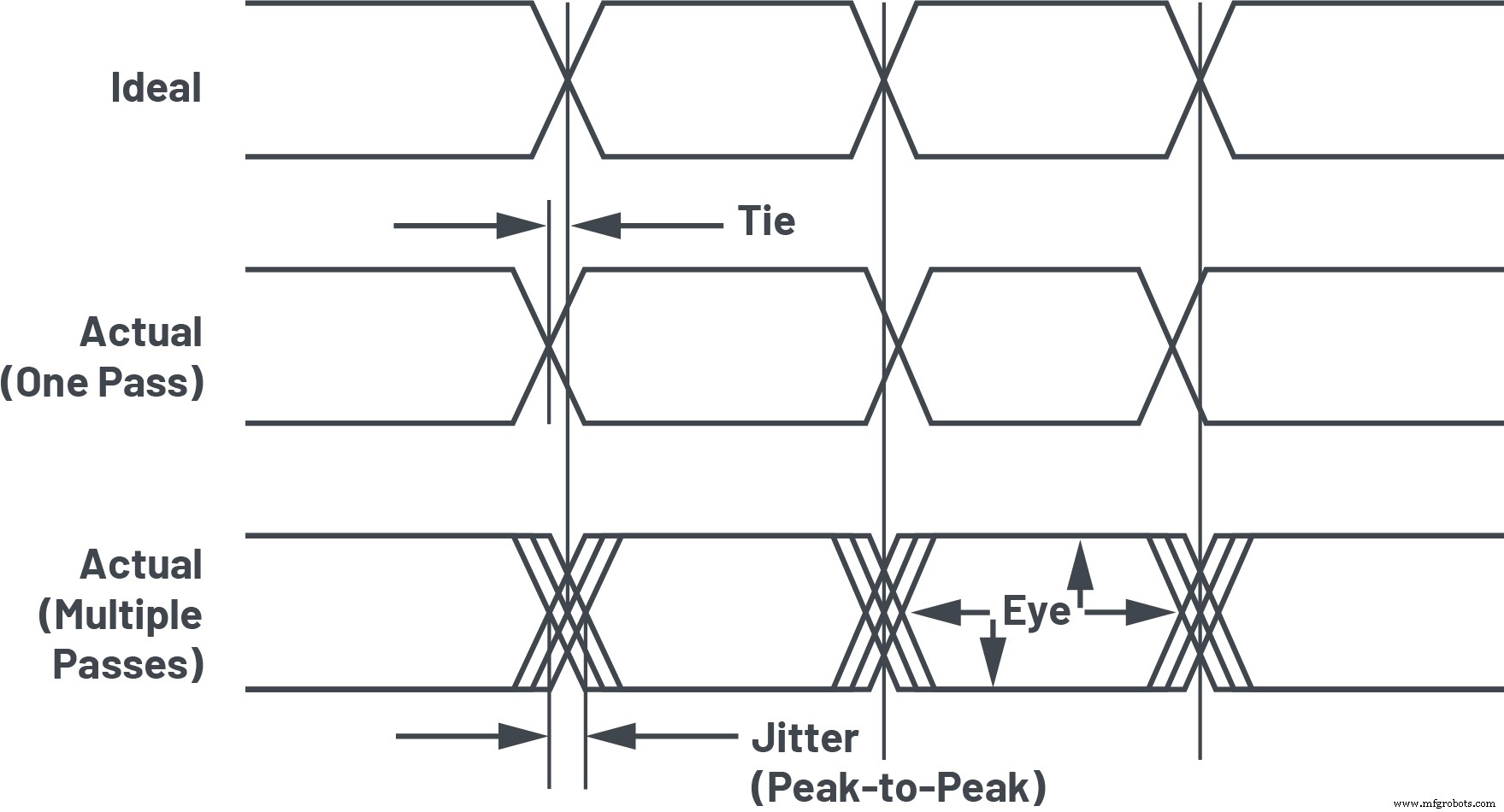
Figura 2. Erro de intervalo de tempo, jitter e olho. (Fonte:Dispositivos analógicos)
A largura das transições sobrepostas é o jitter de pico a pico, com a área aberta no meio referida como o olho. Este olho é a área disponível para amostragem pelo nó receptor na extremidade de um cabo RS-485 longo. Uma largura de olho maior fornece ao nó receptor uma janela mais ampla para amostragem e reduz o risco de receber um bit incorretamente. O olho disponível é afetado principalmente por contribuições de jitter determinísticas do driver e receptor RS-485 e do cabo de interconexão.
clique para ampliar a imagem
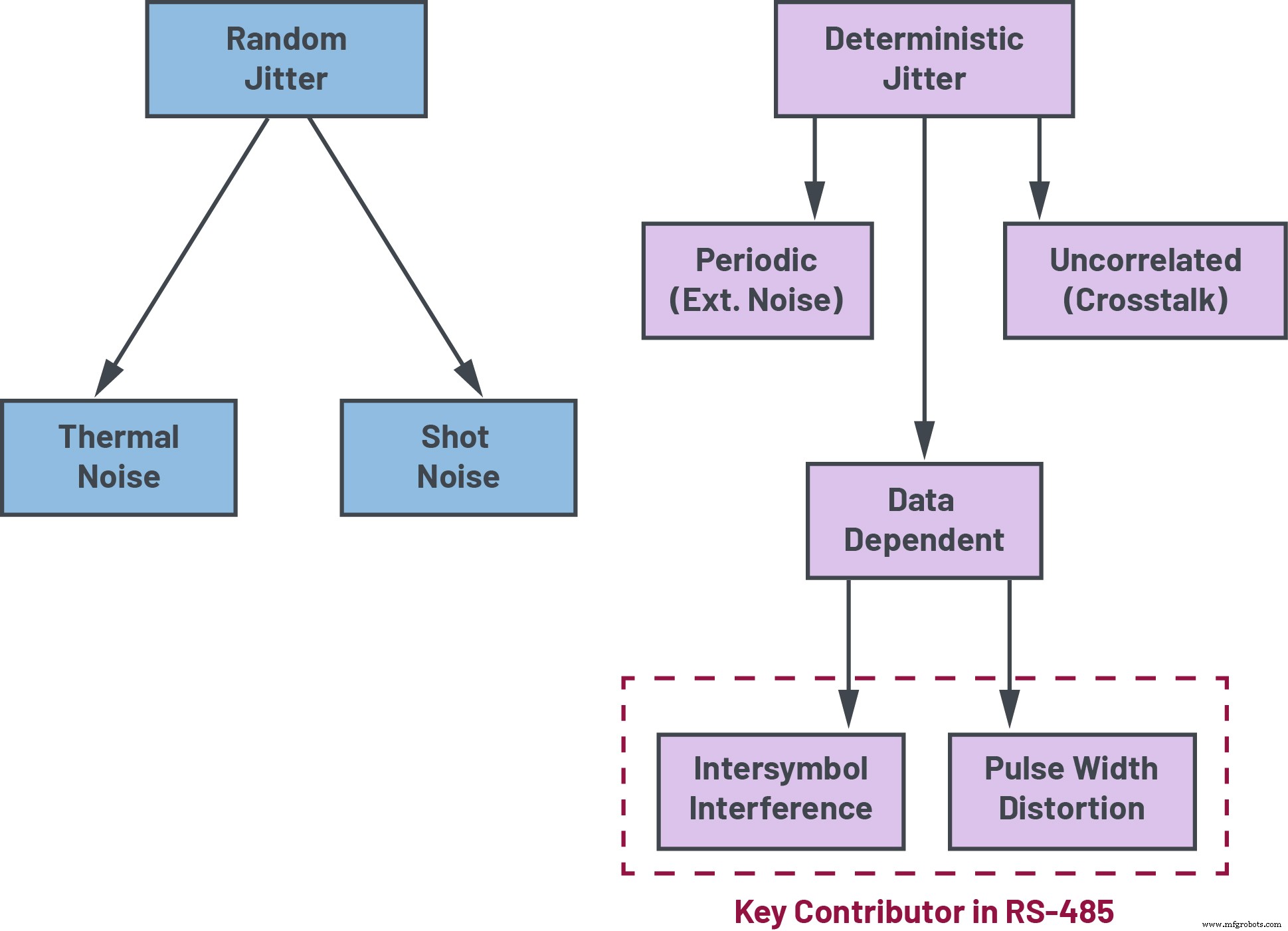
Figura 3. Principais contribuintes para jitter em redes de comunicação RS-485. (Fonte:Dispositivos analógicos)
A Figura 3 mostra as várias fontes de jitter em uma rede de comunicação. Em sistemas de comunicação baseados em RS-485, dois contribuintes principais para o desempenho de temporização são a distorção do pulso do transceptor e a interferência intersimbólica. A inclinação de pulso, também conhecida como distorção de largura de pulso ou distorção de ciclo de serviço, é uma forma de jitter determinístico introduzido pelos transceptores nos nós de transmissão e recepção. A inclinação de pulso é definida como a diferença no atraso de propagação entre as bordas ascendente e descendente de um sinal. Em comunicações diferenciais, essa inclinação cria um ponto de cruzamento assimétrico e uma incompatibilidade entre a duração dos 0s e 1s transmitidos. Em um sistema de distribuição de relógio, a distorção excessiva do pulso se manifesta como uma distorção no ciclo de trabalho do relógio transmitido. Em um sistema de distribuição de dados, essa assimetria aumenta o jitter pico a pico observado no diagrama do olho. Em ambos os casos, a distorção de pulso excessiva afeta negativamente os sinais transmitidos pelo RS-485 e reduz a janela de amostragem disponível e o desempenho geral do sistema.
A interferência intersimbólica (ISI) ocorre quando o tempo de chegada de uma borda de sinal é influenciado pelo padrão de dados que procedeu a essa borda. Os efeitos de interferência intersimbólica tornam-se proeminentes em aplicações com interconexões de cabo mais longas, tornando o ISI um contribuidor chave em redes RS-485. A interconexão mais longa cria uma constante de tempo RC em que a capacitância do cabo não foi totalmente carregada ao final de um único período de bit. Em aplicações onde os dados transmitidos consistem em apenas um relógio, esta forma de interferência intersimbólica não está presente. A interferência intersimbólica também pode ser causada por incompatibilidades de impedância na linha de transmissão do cabo, de stubs de linha ou uso impróprio de resistores de terminação. Os transceptores RS-485 com alta potência de saída geralmente ajudam a minimizar os efeitos ISI, pois requerem menos tempo para carregar a capacitância de carga do cabo RS-485.
A porcentagem de jitter pico a pico tolerável é altamente dependente da aplicação e, geralmente, 10% de jitter é usado para avaliar a combinação do transceptor RS-485 e o desempenho do cabo. Uma combinação de jitter excessivo e inclinação afetam a capacidade de amostragem do transceptor RS-485 receptor, aumentando a probabilidade de erros de comunicação. Em redes de transmissão com terminação adequada, a escolha de um transceptor otimizado para minimizar a distorção do pulso do transceptor e os efeitos de interferência intersimbólica resulta em um link de comunicação mais confiável e livre de erros.
Projeto do transceptor RS-485 e efeitos de cabo
O padrão TIA-485-A / EIA-485-A RS-485
3
fornece especificações para o projeto e faixa operacional de transmissores e receptores RS-485, incluindo diferencial de saída de tensão (VOD), características de curto-circuito, carregamento de modo comum e limites e faixas de tensão de entrada. O desempenho de temporização RS-485, incluindo inclinação e jitter, não é especificado no padrão TIA-485-A / EIA-485-A e é otimizado por fornecedores de IC com especificações de folha de dados do produto.
Outros padrões, como o TIA-568-B.2 / EIA-568-B.2, padrão de telecomunicações para cabeamento de par trançado
4
fornecer fundo para os efeitos CA e CC do cabo na qualidade do sinal RS-485. Este padrão fornece considerações e procedimentos de teste para jitter, skew e outras medições de tempo, com limites de desempenho definidos; por exemplo, a inclinação máxima permitida do cabo Categoria 5e é de 45 ns por 100 m. Leia Desempenho RS-485 aprimorado para obter mais informações sobre o padrão TIA-568-B.2 / EIA-568-B.2 e as consequências do uso de cabeamento não ideal no desempenho do sistema.
Embora os padrões disponíveis e as planilhas de dados do produto forneçam uma boa fonte de informações úteis, qualquer caracterização significativa do desempenho de temporização do sistema requer a medição de um transceptor RS-485 em um cabo longo.
clique para ampliar a imagem
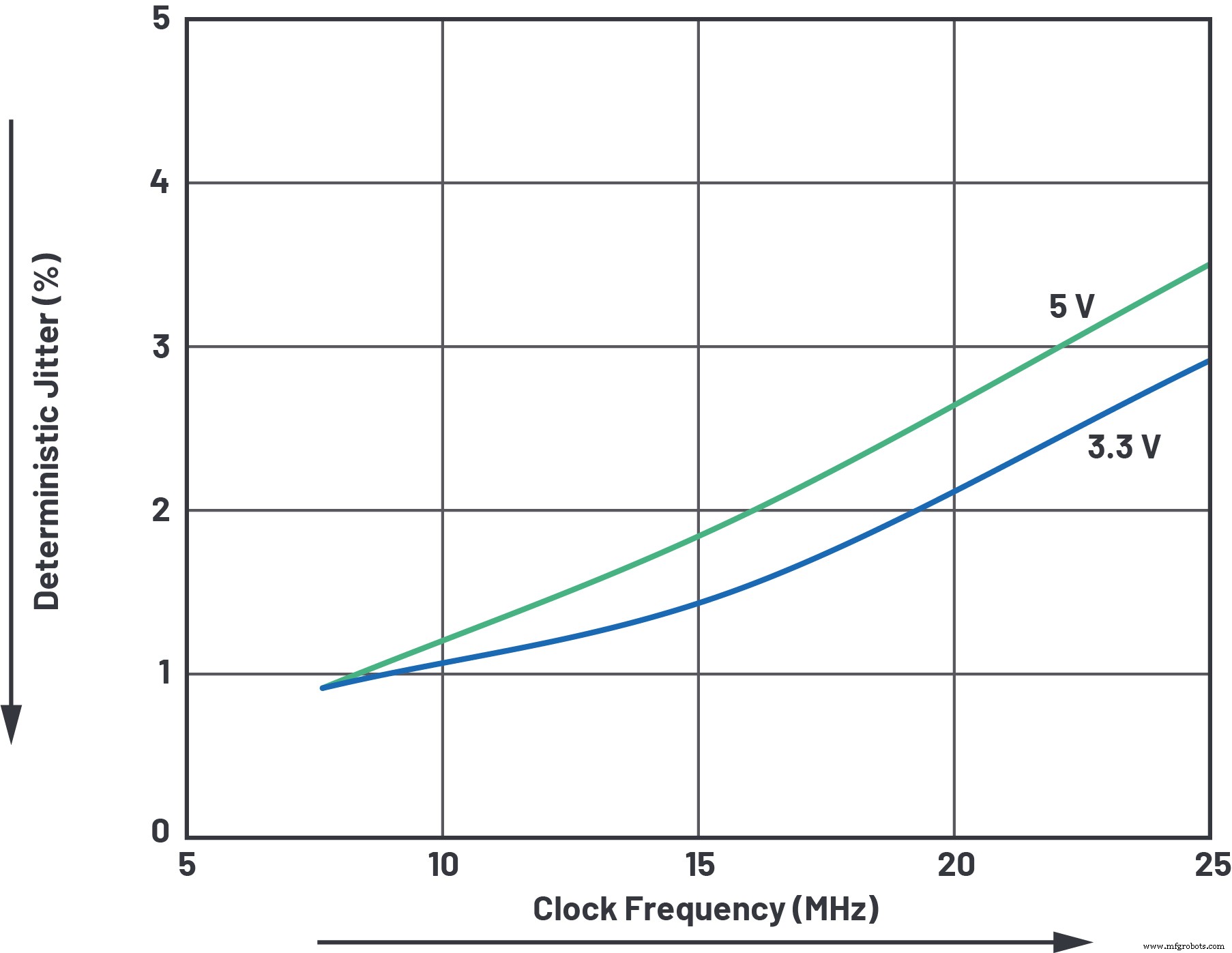
Figura 4. Desempenho típico de instabilidade do clock do ADM3065E. (Fonte:Dispositivos analógicos)
Comunicação mais rápida e melhor com RS-485
Os transceptores RS-475 de próxima geração fornecem desempenho aprimorado para atender às necessidades de aplicativos usando padrões como TIA-485-A / EIA-485-A que não definem inclinação e jitter. Por exemplo, os transceptores RS0485 como o ADM3065E da Analog Devices fornecem desempenho ultrabaixo de transmissor e receptor. Isso permite que os sistemas ofereçam suporte à transmissão de um relógio de precisão, o que costuma ser incluído em padrões de codificação de motor, como EnDat 2.2.
5
Conforme mostrado nas Figuras 4 e 5, os sistemas demonstraram mostrar menos de 5% de jitter determinístico em comprimentos de cabo típicos encontrados em aplicações de controle de motor. A ampla faixa de alimentação do transceptor significa que este nível de desempenho de temporização está disponível para aplicações que requerem uma fonte de alimentação de 3,3 V ou 5 V do transceptor.
clique para ampliar a imagem
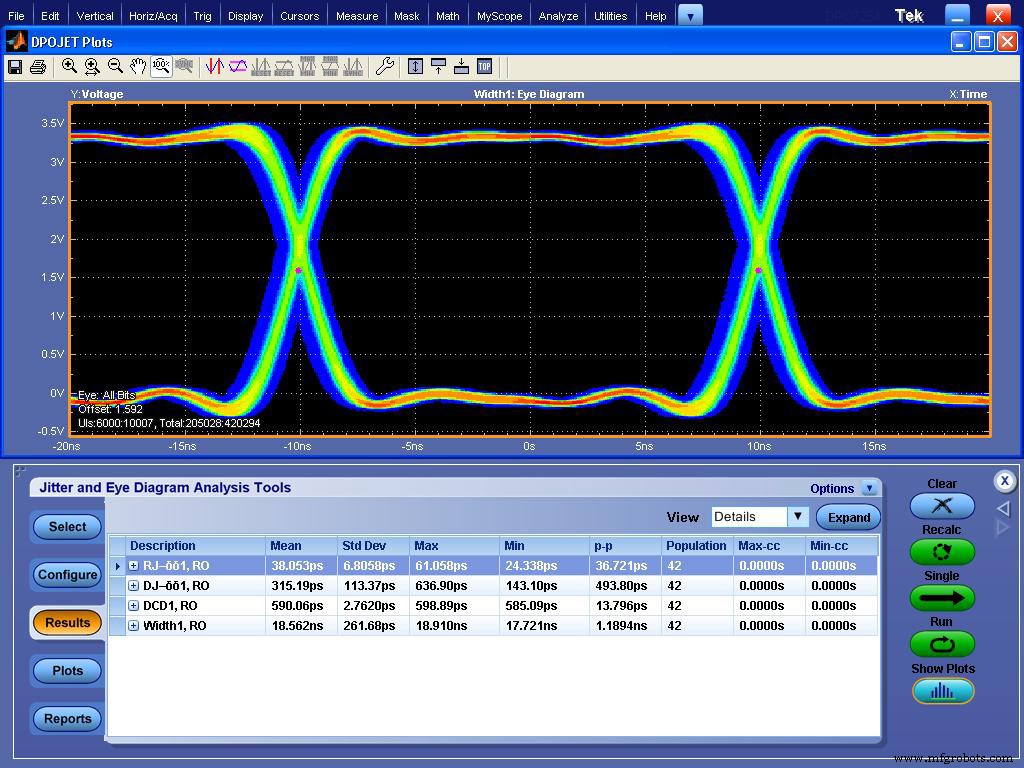
Figura 5. Diagrama do olho receptor do ADM3065E:clock de 25 MHz distribuído por cabo de 100 m. (Fonte:Dispositivos analógicos)
Além da distribuição de clock superior, o desempenho de temporização aprimorado também permite a distribuição confiável de dados, com saídas de alta velocidade e jitter adicionado mínimo. A Figura 6 mostra que, usando um transceptor aprimorado, as limitações de tempo tipicamente citadas para comunicação de dados RS-485 podem ser bastante relaxadas. Os transceptores RS-485 padrão são normalmente orçados para operação com variação de 10% ou menos. O ADM3065E pode operar a mais de 20 Mbps em até 100 m de cabo e ainda manter apenas 10% de jitter no nó receptor. Este baixo nível de jitter reduz o risco de amostragem incorreta pelo nó de recebimento de dados e resulta em confiabilidade de transmissão que antes não era possível usando transceptores RS-485 típicos. Em aplicações onde o nó receptor pode tolerar níveis de jitter de até 20%, taxas de dados de até 35 Mbps em extensões de cabo de 100 m são alcançáveis.
clique para ampliar a imagem
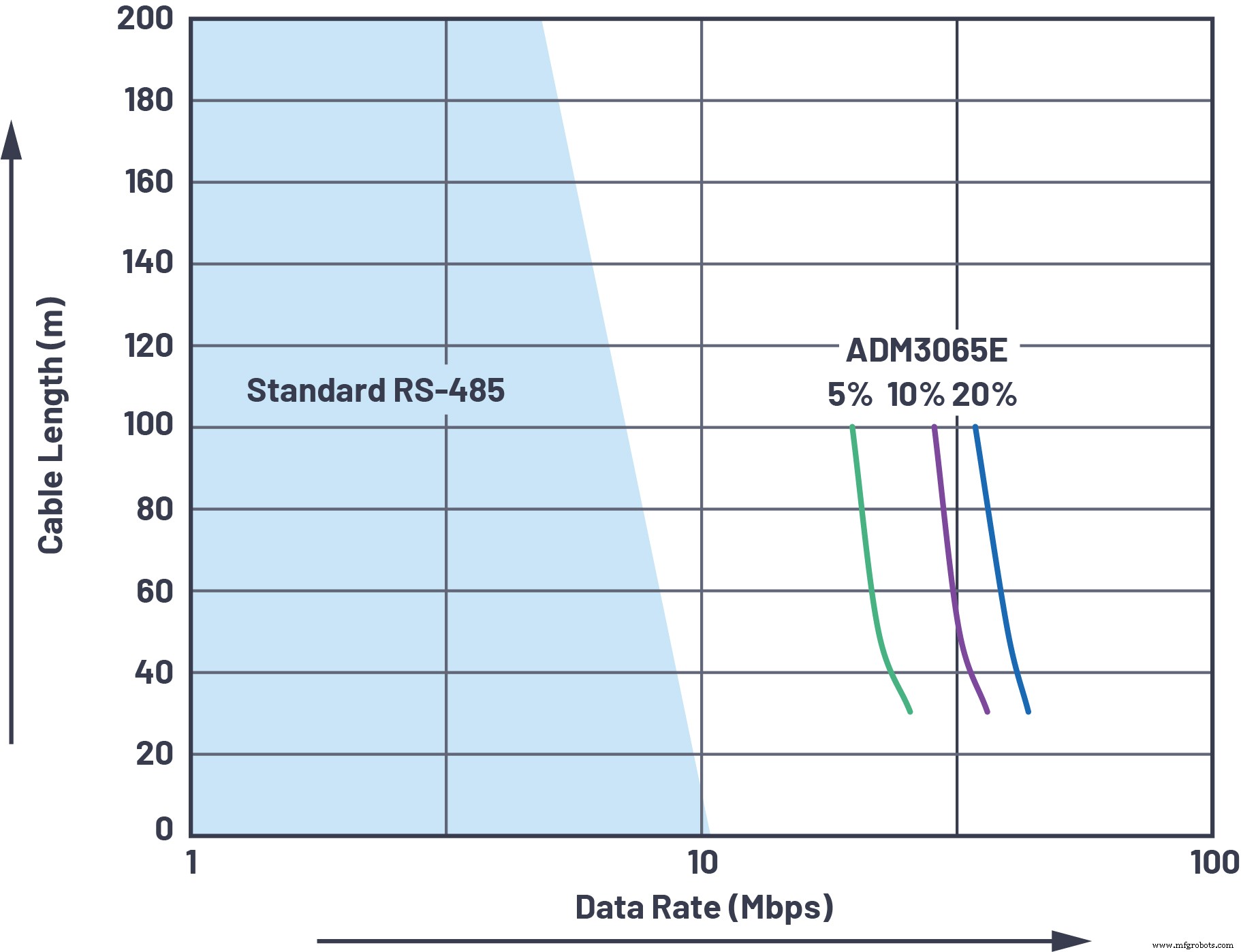
Figura 6. ADM3065E recebendo desempenho de jitter superior do nó de dados. (Fonte:Dispositivos analógicos)
Para cada pacote transferido usando o protocolo de codificação EnDat 2.2, os dados são transmitidos em sincronização com as bordas decrescentes do clock. A Figura 7 ilustra que o (s) bit (s) de início inicia a transmissão de dados do codificador de volta ao controlador mestre, após o cálculo inicial da posição absoluta (TCAL). Os bits de erro subsequentes (F1, F2) indicam quando um mau funcionamento do codificador pode resultar em valores de posição incorretos. O codificador então transmite um valor de posição absoluta, começando com LS, com os dados seguintes. A integridade do relógio e do sinal de dados é crítica para uma posição bem-sucedida e sinalização de erro em cabos longos, com o EnDat 2.2 especificando um jitter máximo de 10%. EnDat 2.2 especifica a operação máxima a uma taxa de clock de 16 MHz em 20 m de cabeamento. A Figura 4 mostra que esses requisitos podem ser atendidos com apenas 5% de jitter do clock, e a Figura 6 mostra que os requisitos de jitter para transmissão de dados são atendidos, enquanto os transceptores RS-485 padrão não. Isso é importante porque o desempenho de temporização superior em relação aos cabos garante que os projetistas do sistema tenham as informações necessárias para habilitar um projeto que foi projetado com sucesso para atender à especificação EnDat 2.2.
clique para ampliar a imagem
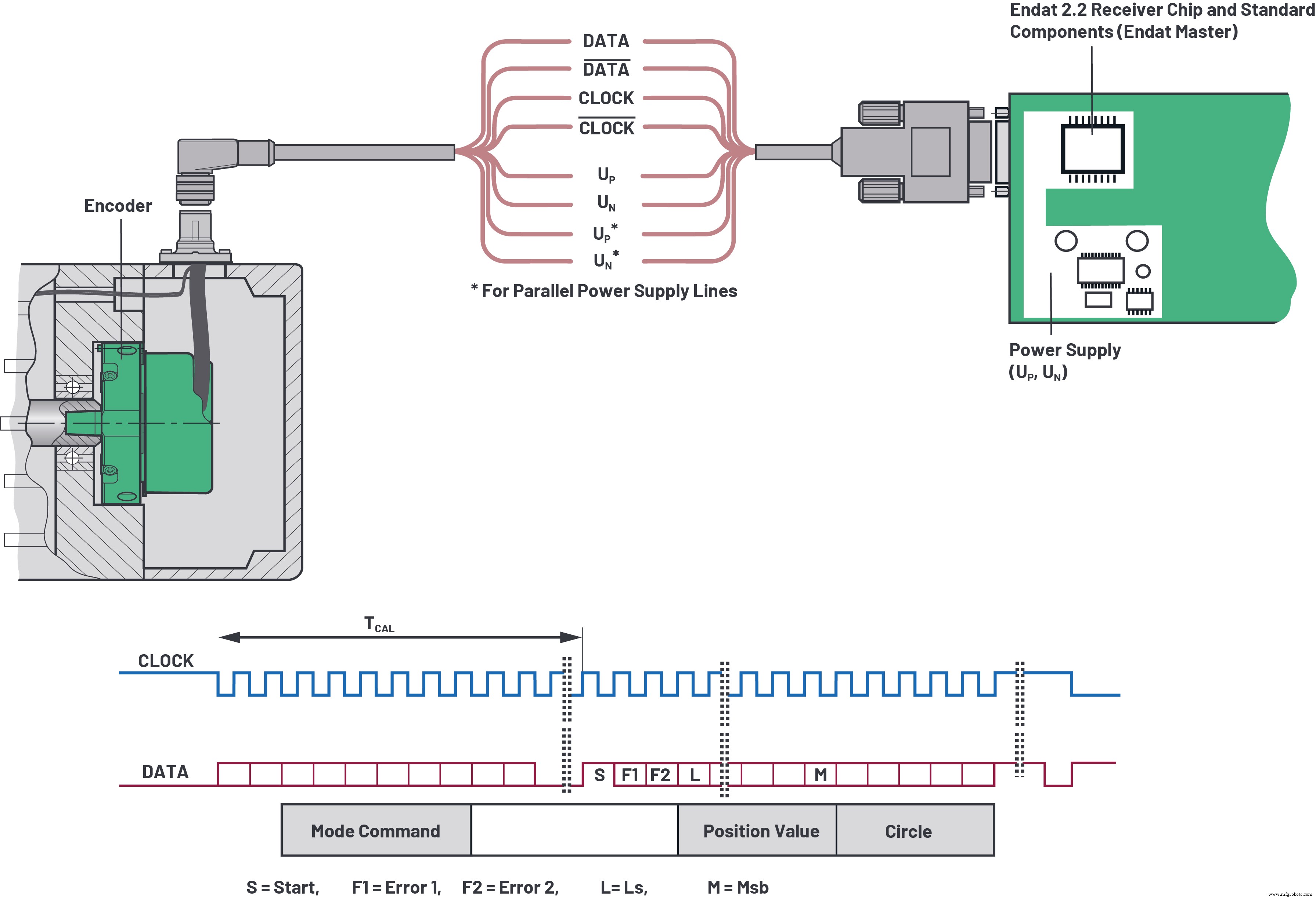
Figura 7. Camada física EnDat 2.2 e protocolo com sincronização relógio / dados (diagramas adaptados de EnDat 2.2). (Fonte:Dispositivos analógicos)
Maior confiabilidade em relação a cabos mais longos
O padrão TIA-485-A / EIA-485-A RS-485
3
requer drivers RS-485 compatíveis para gerar uma amplitude de tensão diferencial, VOD, de pelo menos 1,5 V em uma rede totalmente carregada. Este 1,5 VOD permite 1,3 V de atenuação de tensão CC em cabos longos, com receptores RS-485 especificados para operar com pelo menos 200 mV de tensão diferencial de entrada. Com um transceptor projetado para emitir um VOD de pelo menos 2,1 V quando alimentado a 5 V, os projetistas podem exceder os requisitos da especificação RS-485.
Uma rede RS-485 totalmente carregada é equivalente a uma carga diferencial de 54 Ω, que simula um barramento de terminação dupla de dois resistores de 120 Ω com mais 750 Ω representando 32 dispositivos conectados de carga de 1 unidade, ou 12 kΩ. O ADM3065E apresenta uma arquitetura de saída proprietária para maximizar o VOD enquanto atende a faixa de tensão de modo comum necessária, superando os requisitos do TIA-485-A / EIA-485-A. A Figura 8 ilustra como o transceptor excede os requisitos do inversor do padrão RS-485 em> 210% quando alimentado por um trilho de alimentação de 3,3 V ou em> 300% quando alimentado por um trilho de alimentação de 5 V. Isso permite que os sistemas se comuniquem mais, com mais nós remotos e com mais margem de ruído do que os transceptores RS-485 normais.
clique para ampliar a imagem
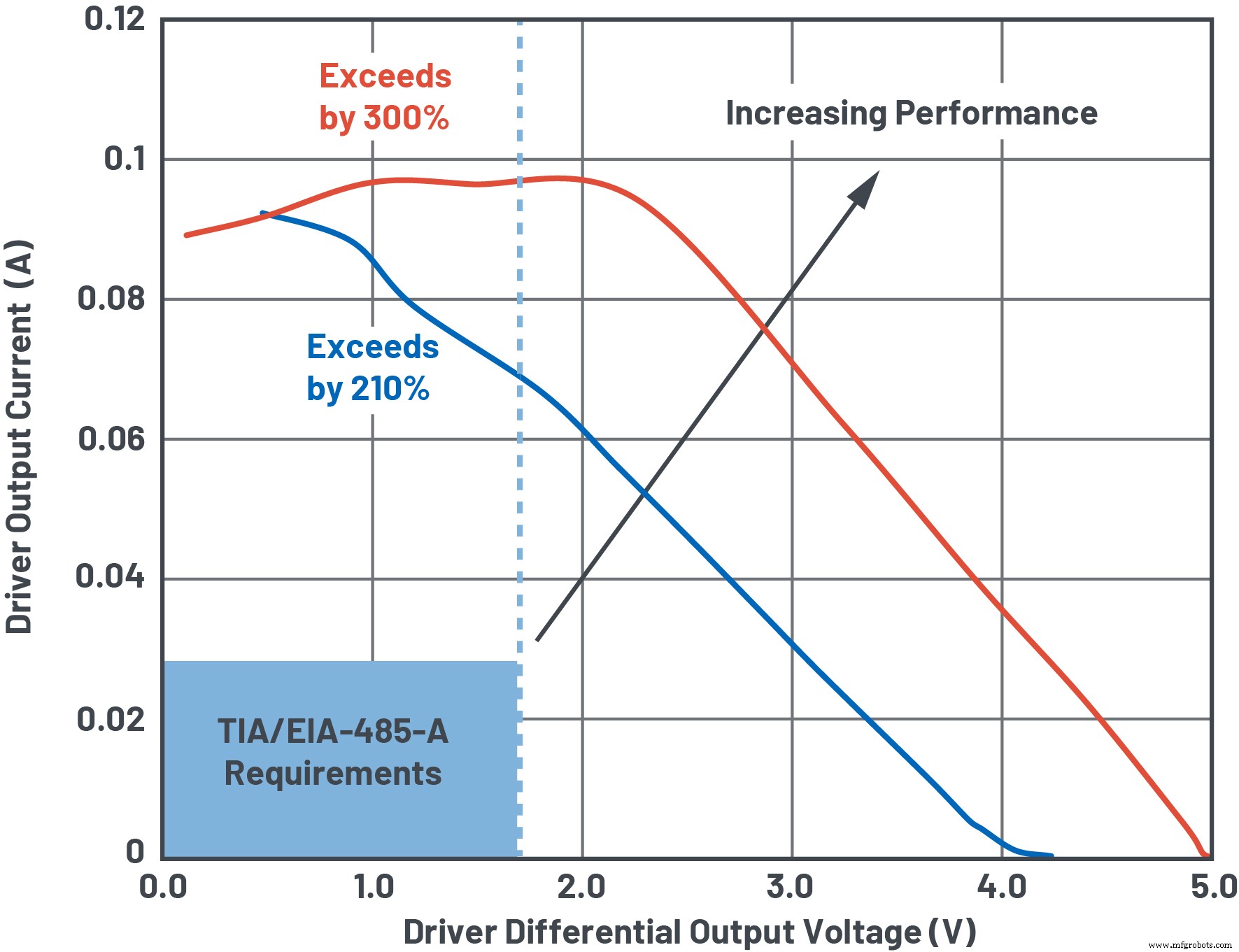
Figura 8. O ADM3065E excedendo os requisitos de drives RS-485 em uma ampla faixa de fornecimento. (Fonte:Dispositivos analógicos)
A Figura 9 ilustra ainda mais esse ponto em uma aplicação típica com mais de 1000 m de cabo. Ao se comunicar por meio de um cabo AWG 24 padrão, um transceptor aprimorado é 30% melhor do que um transceptor RS-485 padrão - com margem de ruído 30% maior no nó receptor ou um aumento de 30% no comprimento máximo do cabo em taxas de dados baixas. Esse desempenho é adequado para aplicações de infraestrutura sem fio, onde o cabo RS-485 se estende além de várias centenas de metros.
clique para ampliar a imagem
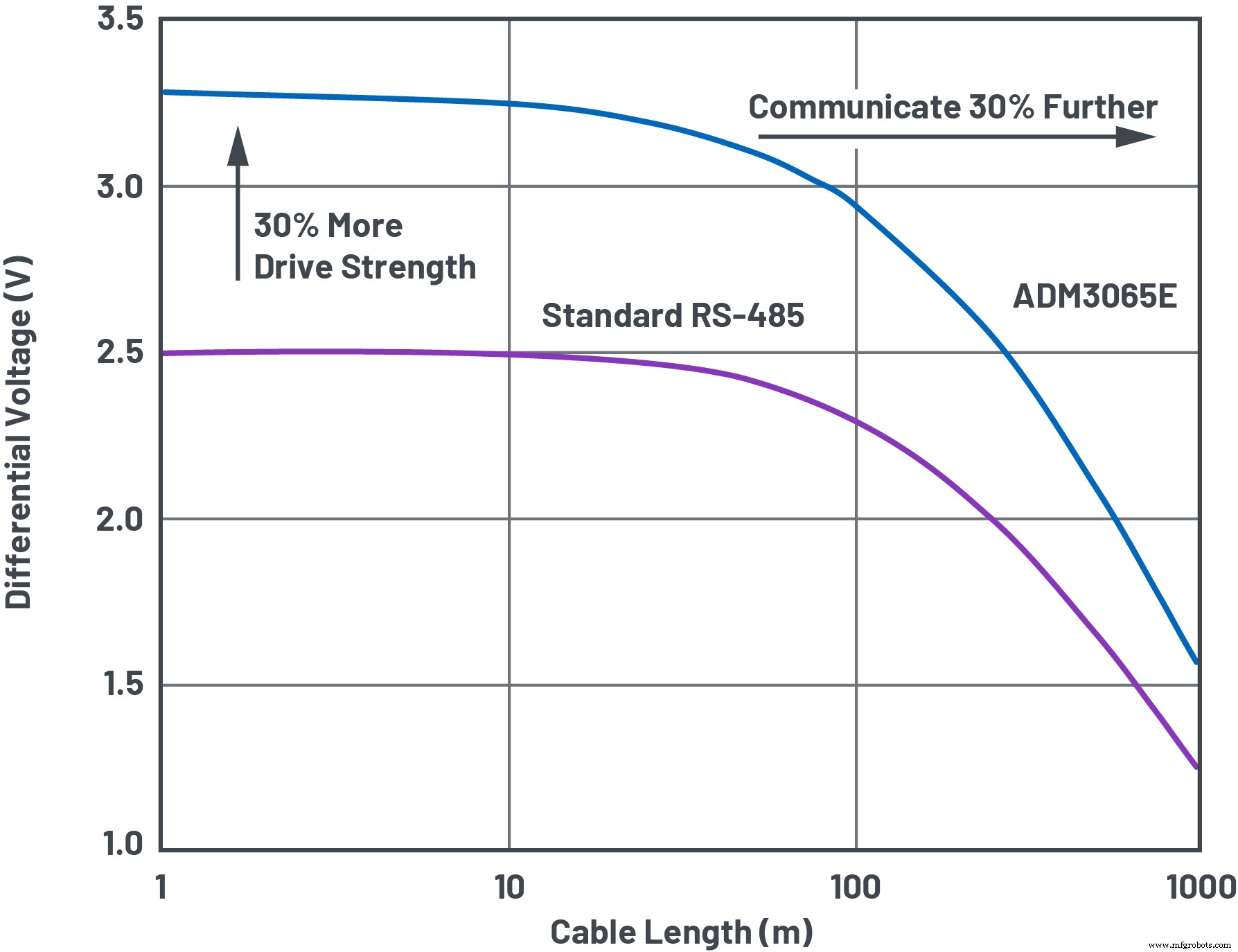
Figura 9. O ADM3065E fornece um sinal diferencial superior para distâncias ultralongas. (Fonte:Dispositivos analógicos)
Proteção EMC e imunidade a ruído
A sinalização RS-485 é balanceada, diferencial e inerentemente imune a ruídos. O ruído do sistema se acopla igualmente a cada fio em um cabo de par trançado RS-485. O cabeamento de par trançado faz com que as correntes de ruído induzidas fluam em direções opostas e os campos eletromagnéticos acoplados ao barramento RS-485 se cancelam. Isso reduz a suscetibilidade eletromagnética do sistema. Além disso, a maior força do inversor permite uma maior relação sinal-ruído (SNR) nas comunicações. Ao longo de cabos longos, como centenas de metros entre o nível do solo e a antena em estações base sem fio, ter um SNR aprimorado, bem como integridade de sinal excelente, garante controle preciso e confiável de inclinação / posição das antenas.
clique para ampliar a imagem
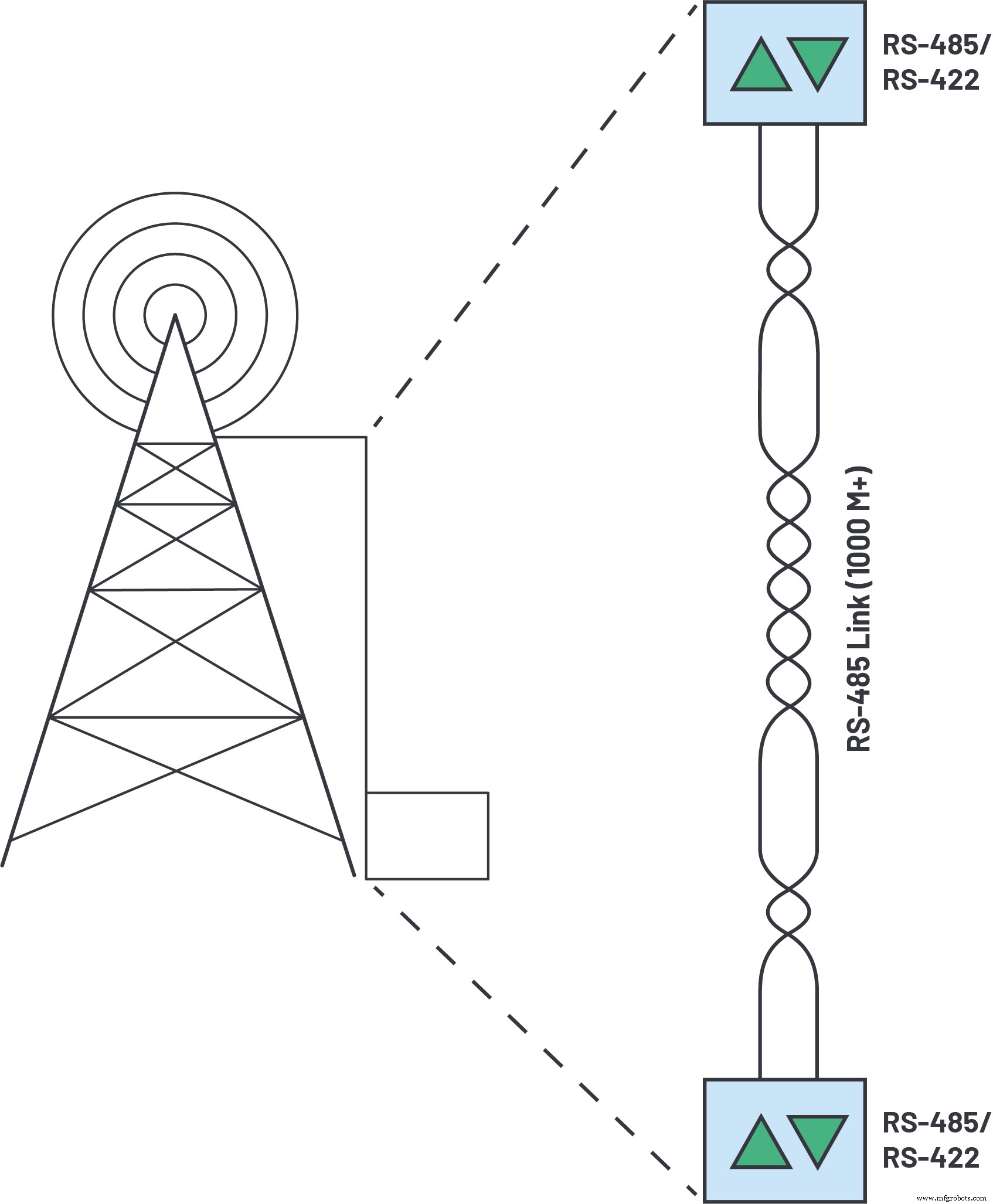
Figura 10. Os comprimentos dos cabos da infraestrutura sem fio podem se estender por centenas de metros. (Fonte:Dispositivos analógicos)
Conforme observado na Figura 1, a proteção EMC é necessária para transceptores RS-485 que fazem interface diretamente com o mundo externo por meio de conectores e cabos adjacentes. Por exemplo, ESD nos conectores RS-485 expostos e no cabeamento do codificador para o acionamento do motor é um risco comum do sistema. O nível de sistema IEC 61800-3 padrão relativo aos requisitos de imunidade EMC para velocidade ajustável, sistemas de acionamento de energia elétrica requerem um contato mínimo de ± 4 kV / ± 8 kV ar IEC 61000-4-2 proteção ESD. Transceptores aprimorados, como o ADM3065E, excedem esse requisito com proteção de ± 12 kV contato / ± 12 kV ar IEC 61000-4-2 ESD.
clique para ampliar a imagem
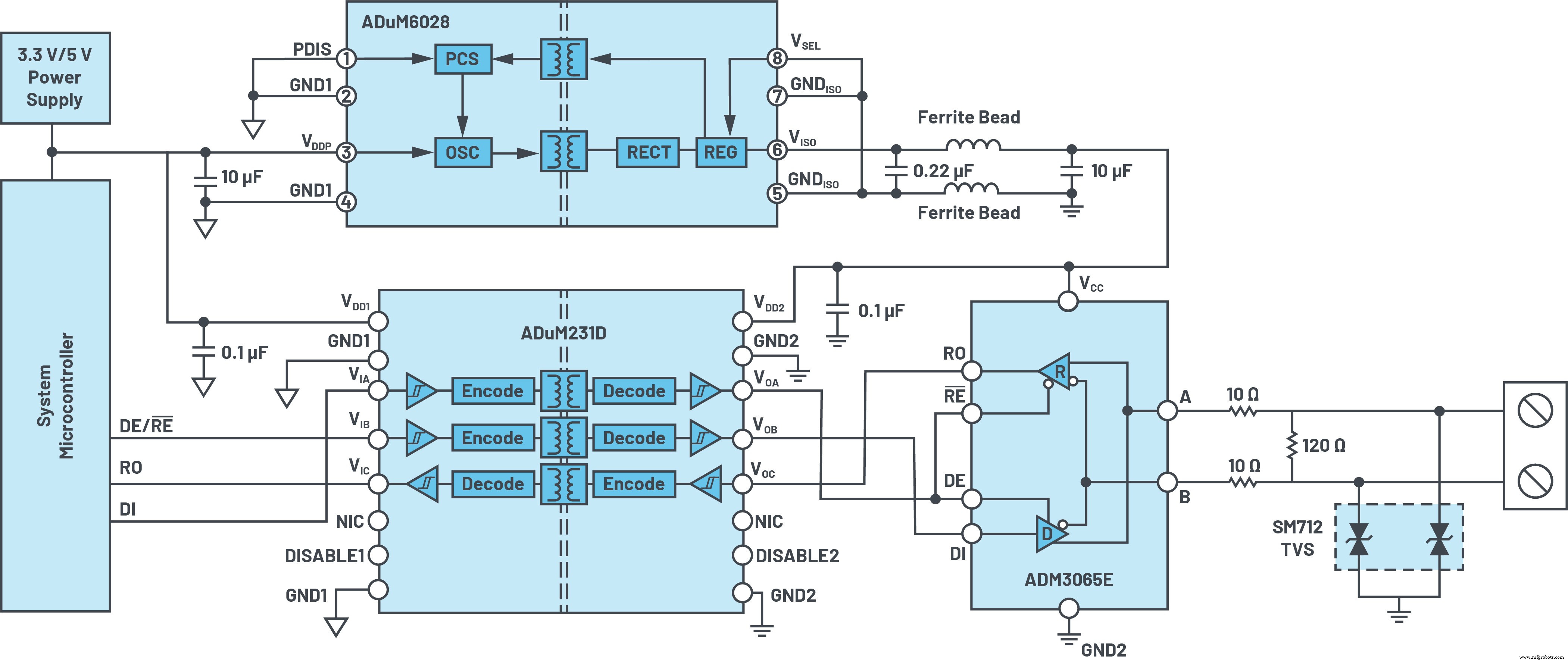
Figura 11. Sinal completo de 25 Mbps e solução RS-485 isolada de energia com ESD, EFT e proteção contra sobretensão. (Fonte:Dispositivos analógicos)
Para aplicações de infraestrutura sem fio, a proteção EMC aprimorada é necessária para proteger contra eventos de pico de raios prejudiciais. Adicionar um SM712 TVS e dois resistores de coordenação de 10 Ω às entradas do transceptor fornece proteção EMC aprimorada - com proteção de até ± 30 kV 61000-4-2 ESD e proteção contra surtos de ± 1 kV IEC 61000-4-5.
Para aumentar a imunidade a ruído para controle de motor eletricamente rigoroso, automação de processo e aplicações de infraestrutura sem fio, pode-se adicionar isolamento galvânico. O isolamento galvânico, com isolamento reforçado e tensão suportável transiente de 5 kV rms, pode ser adicionado ao ADM3065E usando i dispositivos analógicos Acoplador
®
e iso Power
®
tecnologia. O ADuM231D fornece os três canais necessários de isolamento de sinal rms de 5 kV, com desempenho de temporização de precisão, permitindo operação robusta a taxas de até 25 Mbps. O conversor DC-DC isolado ADuM6028 fornece a energia isolada necessária com uma classificação de resistência de 5 kV rms. Dois grânulos de ferrite são usados para atender facilmente aos padrões de conformidade EMC, como EN 55022 Classe B / CISPR 22, resultando em uma solução CC para CC isolada e compacta em um fator de forma de 6 mm × 7,5 mm.
Os transceptores RS-485 de última geração superam os padrões da indústria, permitindo a possibilidade de comunicação mais avançada e mais rápida em comparação com os dispositivos RS-485 padrão. Em níveis de jitter de 10% especificados em EnDat 2.2
5
, os sistemas podem operar a uma taxa de clock de 16 MHz em um máximo de 20 m de cabeamento, com o padrão RS-485 lutando para atender a esse requisito. Excede os requisitos de direcionamento do barramento RS-485 em até 300% oferece melhor confiabilidade e mais margem de ruído em cabos mais longos. A imunidade ao ruído pode ser melhorada adicionando i Isolamento de acoplador, incluindo o isolador de sinal ADuM231D e a solução de energia isolada de menor fator de forma da indústria, o ADuM6028.
Referências
1
“A contagem de nós de PROFINET e PROFIBUS chega a 87 milhões em 2018.” Grupo Profibus, maio de 2019.
2
Conal Watterson. “Guia de implementação do circuito LVDS e M-LVDS.” Analog Devices, Inc., março de 2013.
3
“TIA/EIA-485-A, Electrical Characteristics of Generators and Receivers for Usein Balanced Digital Multipoint Systems.” IHS Markit Inc., March 1998.
4
“TIA/EIA-568-B.2, Commercial Building Telecommunications Cabling Standard—Part 2:Balanced Twisted Pair Cabling Components.” Telecommunications Industry Association, May 2001.
5
“EnDat 2.2—Bidirectional Interface for Position Encoders.” Heidenhain, September 2017.
Integrado
- Armazene e gerencie dados confidenciais com o gerenciador secreto
- MÓDULO DE DADOS:monitores de grande porte com alto brilho e função easyTouch
- Microchip:ADCs de 24 e 16 bits com taxas de dados de até 153,6 kSPS
- Apacer:série SSD SV250 de nível industrial com velocidades de leitura / gravação de 560 e 520 MB / s
- A Arrow se une ao ADLINK e à Microsoft para permitir uma implantação mais rápida de soluções IoT Industriais
- Contrinex:sensores inteligentes prontos para a nuvem e cortinas de luz de segurança com interface Bluetooth
- Dos dados ao gráfico:uma jornada na web com o Flask e o SQLite
- Projete e fabrique mais rápido com Formlabs e Fusion 360
- O que eu faço com os dados ?!
- Acelerando a transformação digital com IoT Data, graças à Cisco e IBM