


Comparando esquemas de endereçamento automático de acesso de carro
Os sistemas de acesso a carros que usam Bluetooth Low Energy normalmente têm um módulo central e vários módulos / nós de satélite, que se comunicam por meio de um barramento de rede de área do controlador (CAN) ou barramentos de rede de interconexão local (LIN). Os módulos de satélite são fisicamente distribuídos ao redor do carro para melhorar o alcance de comunicação do Bluetooth.
Os projetistas de sistemas gostariam de melhorar a capacidade de fabricação do módulo de satélite, projetando um PCB com software idêntico, de forma que a instalação no carro seja independente da posição do nó Bluetooth. No entanto, uma vez que o hardware e o software de cada nó de satélite no momento da instalação são idênticos, é necessário um esquema para permitir que o módulo central atribua um endereço CAN ou LIN exclusivo a cada nó de satélite após os módulos serem instalados no veículo.
Uma opção é usar uma rede LIN dedicada em cadeia para compartilhar CAN IDs com os módulos durante a fabricação. Neste cenário, o módulo central usa a interface LIN para endereçar cada módulo satélite, mas a interface LIN não será usada novamente durante a vida do veículo. Outra opção substitui o barramento LIN dedicado por uma implementação discreta que reduz os custos da lista de materiais (BOM). Para reduzir ainda mais os custos do sistema, uma verdadeira opção sem fio usando apenas Bluetooth, e nenhum hardware extra, reaproveita a infraestrutura Bluetooth já disponível nos nós para endereçar os módulos.
Em última análise, o método sem fio reduz o BOM, a fiação do sistema e o custo de estocar, gerenciar e montar os componentes agora desnecessários. Este artigo apresenta uma visão geral dos métodos de endereçamento automático com fio antes de dar uma olhada mais aprofundada no método sem fio.
Os sistemas de acesso a carros automotivos têm tendência a usar Bluetooth Low Energy para telefones como chave ou outros recursos de chave digital. Esses sistemas operam de forma semelhante aos sistemas de partida passiva de entrada passiva, mas adicionam a capacidade de usar o smartphone do motorista como a chave, substituindo assim os porta-chaves tradicionais. Os veículos compatíveis com o telefone como uma chave implementam um módulo central ou módulo de chave inteligente e vários módulos de satélite, cada um capaz de receber um sinal Bluetooth de um smartphone ou chaveiro. Um sistema típico pode ter entre seis e 12 módulos de satélite, além do módulo central (Figura 1).
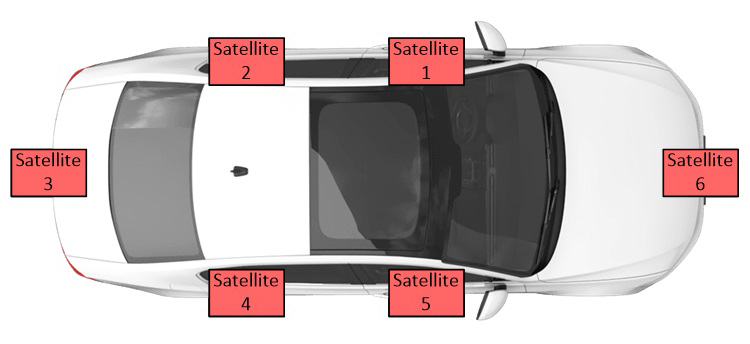
Figura 1. Este diagrama mostra onde os módulos de satélite Bluetooth podem ser distribuídos por todo o carro.
Os consumidores precisam do sistema de telefone como chave para determinar quando o telefone ou chaveiro está dentro da zona de desbloqueio do veículo. Para aproximar a localização do smartphone ou chaveiro, o sistema triangula os sinais recebidos por vários módulos de satélite, que são distribuídos por todo o carro em locais como a porta do lado do passageiro, painel basculante, porta-malas ou pára-choques.
O módulo central do veículo se comunica com os módulos de satélite usando uma interface de comunicação, como barramento CAN ou barramento LIN. O módulo central usa os dados recebidos de cada módulo de satélite para triangular a localização do smartphone ou chaveiro e, em seguida, determina se deve conceder acesso de entrada ao carro. A Figura 2 ilustra como um barramento CAN pode ser usado como a principal rede de comunicação entre os módulos central e satélite.
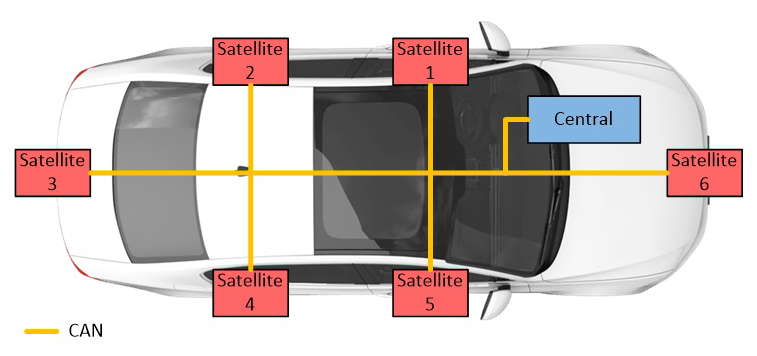
Figura 2. Um barramento CAN pode ser assumido como a principal rede de comunicação entre os módulos central e satélite em uma rede de sistema de acesso automotivo Bluetooth.
O endereço de barramento CAN dos módulos de satélite permite que o módulo central determine de qual módulo de satélite ele está recebendo dados. O módulo central associa o CAN ID ou endereço exclusivo com a localização de cada módulo de satélite específico, determinado pelo projeto geral do sistema. Em vez de ter um PCB exclusivo para cada módulo de satélite, com o endereço de barramento cabeado ou codificado, seria vantajoso ter um design de PCB único executando uma única versão de firmware para todos os módulos de satélite. Isso evita o custo adicional e os problemas de logística envolvidos na fabricação e gerenciamento de estoque de seis, oito ou mais unidades quase idênticas. Um único design também simplifica a fabricação, permitindo a instalação do mesmo módulo de satélite em qualquer lugar do veículo.
Uma vez que o hardware e o software dos nós de satélite são todos idênticos e não corrigidos no momento da instalação, é necessário um esquema que permita ao módulo central atribuir um único CAN ID ou endereço a cada módulo de satélite após a instalação no automóvel.
Endereçamento automático com fio:método de cadeia daisy LIN
Atualmente, a atribuição de endereços de barramento CAN a módulos de satélite em automóveis é realizada por meio de uma rede de comunicação separada (como LIN) com os satélites encadeados em série no barramento (Figura 3). O módulo central envia um endereço de rede do barramento CAN ao primeiro nó de satélite pelo barramento LIN. Depois de concluído, o primeiro nó satélite enviará o próximo endereço recebido do módulo central para o segundo satélite usando o barramento LIN. Este processo continua até que todos os satélites tenham recebido seus endereços CAN exclusivos.
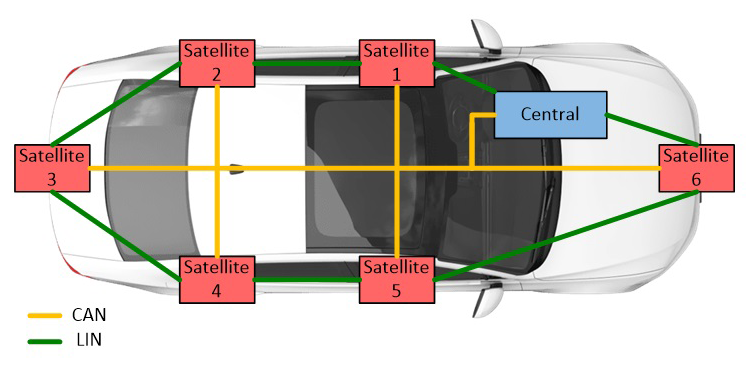
Figura 3. Esta arquitetura de endereçamento automático usa uma cadeia LIN para enviar os IDs CAN exclusivos aos satélites.
Este esquema requer duas camadas físicas LIN (PHYs) por módulo, uma para receber dados e outra para transmitir dados. Os LIN PHYs são usados apenas durante a operação de endereçamento automático. Uma vez que os satélites são programados, todas as comunicações de dados padrão são realizadas através do barramento CAN de acesso ao carro. Um automóvel típico pode ter de seis a 12 módulos de satélite, o que significa que exigirá de 14 a 26 LIN PHYs para suportar a operação de endereçamento automático único, adicionando significativamente ao BOM de PCB do veículo, custo do sistema e complexidade.
Endereçamento automático com fio:método de fio único
A Texas Instruments desenvolveu um método alternativo para reduzir o custo de BOM de cada módulo, substituindo os LIN PHYs de endereçamento automático dedicados por um MOSFET e alguns resistores. A principal diferença no software de endereçamento automático deste esquema é que todos os módulos de satélite são programados para o sistema de chip Bluetooth (SoC) para ignorar o barramento CAN até que um sinal de ativação seja recebido na linha P_IN. A Figura 4 mostra o diagrama de blocos.
clique para ampliar a imagem
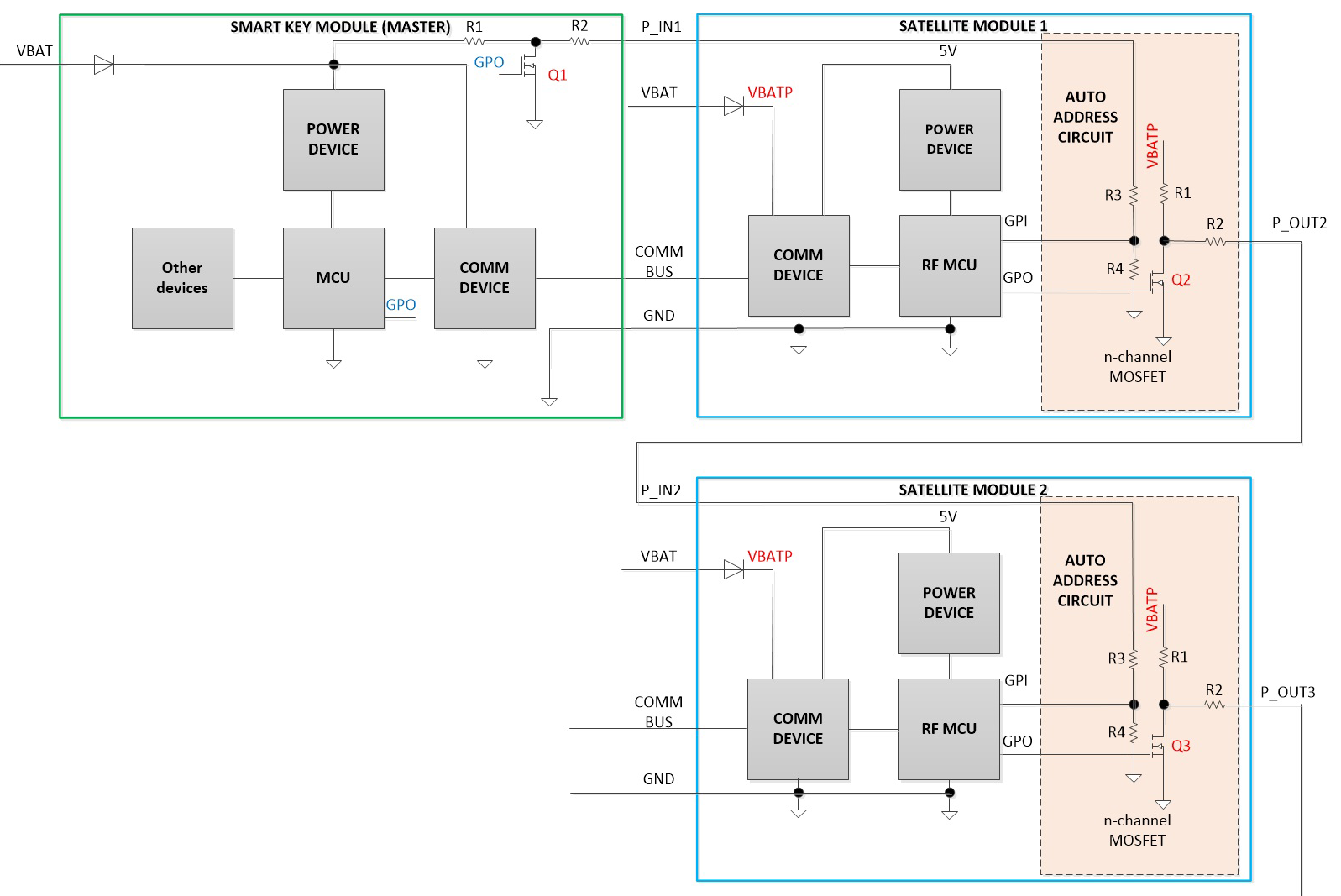 Figura 4. O método de endereçamento automático de fio único substitui os LIN PHYs por um MOSFET e alguns resistores.
Figura 4. O método de endereçamento automático de fio único substitui os LIN PHYs por um MOSFET e alguns resistores.
O módulo central inicia o processo de endereçamento automático enviando um sinal de modulação por largura de pulso (PWM) na linha P_IN1 usando o transistor de efeito de campo Q1. Por meio de um divisor de tensão, o primeiro módulo de satélite recebe o sinal de ativação do nível da bateria, P_IN1, sinalizando ao MCU Bluetooth para “ouvir” o barramento CAN. Em paralelo, o módulo central começa a transmitir constantemente o primeiro módulo de satélite CAN ID no barramento CAN. Assim que o primeiro módulo satélite recebe a mensagem CAN ID, ele envia uma mensagem de reconhecimento de volta ao módulo central para confirmar a recepção adequada do endereço. Depois de enviar a mensagem de reconhecimento, o primeiro módulo de satélite envia o sinal de despertar PWM para o segundo módulo de satélite, sinalizando a esse módulo para começar a ouvir o barramento CAN e receber seu novo CAN ID. Após o módulo central receber a mensagem de reconhecimento do primeiro módulo de satélite, o barramento CAN transmitirá constantemente a mensagem de CAN ID do segundo módulo de satélite até receber uma mensagem de reconhecimento do segundo módulo de satélite.
Em resumo, cada módulo satélite, um a um, desperta o próximo para receber o CAN ID do barramento CAN. O módulo central incrementa o próximo CAN ID transmitido após receber uma mensagem de reconhecimento do módulo satélite endereçado até que todos os módulos sejam endereçados *.
Embora seja uma melhoria, esta implementação ainda requer fiação entre o módulo central e cada um dos módulos de satélite, conforme mostrado na Figura 5.
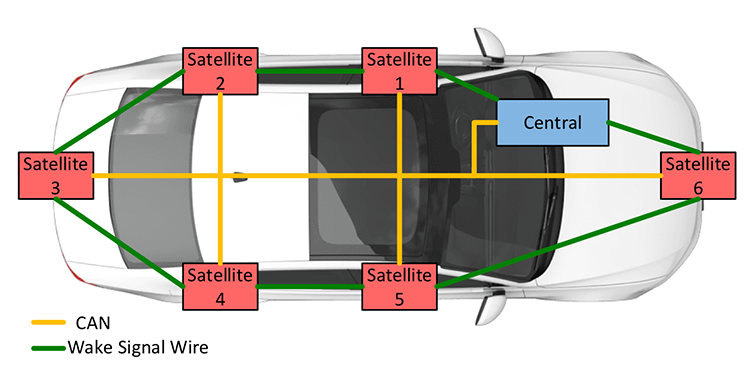
Figura 5. A arquitetura de endereçamento automático de fio único ainda requer fiação entre os módulos central e satélite.
Auto-endereçamento / substituição de cabo sem fio
A Texas Instruments também desenvolveu um método de endereçamento automático que usa técnicas de localização Bluetooth. Essas técnicas permitem que os módulos de satélite Bluetooth sejam atribuídos a um endereço CAN do módulo central durante a fabricação e após a substituição de um módulo. O processo de endereçamento do módulo começa com o módulo determinado como o mais próximo do módulo central e continua na ordem do mais próximo para a distância mais distante até que o módulo mais distante seja endereçado. A localização real não é necessária, uma vez que a localização dos módulos, a técnica de medição e os arredores do módulo irão determinar a distância medida. A distância dn representa a distância medida (a partir da indicação de intensidade do sinal recebido por Bluetooth [RSSI]), idealmente:
d1 clique para ampliar a imagem Tabela 1. Comparação de técnicas de endereçamento automático >> Este artigo foi publicado originalmente em nosso site irmão, EDN.
Por exemplo, a Figura 6 mostra o diagrama de blocos e a distância entre cada módulo e o módulo central.
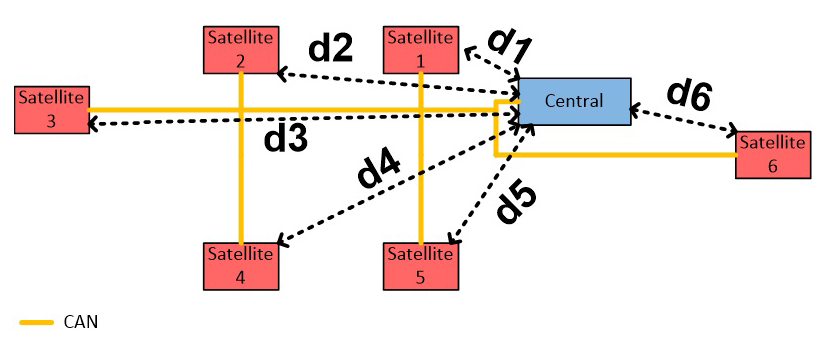
Figura 6. Este diagrama mostra as distâncias entre cada módulo no método de endereçamento automático sem fio do módulo central.
Na prática, a distância real pode variar da distância medida devido às características de propagação de radiofrequência (RF) do espaço entre o satélite específico e o módulo central. Mas, contanto que a distância medida de cada módulo de satélite seja repetidamente consistente e não haja sobreposição entre as distâncias medidas de vários módulos, o módulo central pode abordá-los adequadamente sem saber sua localização exata ao redor do veículo porque as distâncias medidas sempre serão na mesma ordem, do mais curto para o mais distante. Portanto, o módulo central saberá, a partir de testes anteriores, que o primeiro módulo é sempre a porta do lado do motorista (endereço CAN 1), o segundo módulo é sempre o pára-choque dianteiro (endereço CAN 2), e assim por diante.
Para garantir que o esquema de endereçamento automático funcione de forma confiável, testes cuidadosos devem ser usados para entender as características de cada modelo de veículo, tornando possível identificar e resolver possíveis problemas. Por exemplo, se as medições de distância do módulo central entre dois ou mais módulos de satélite não endereçados são semelhantes ou iguais, um módulo de satélite endereçado anteriormente pode ser usado para localizar aqueles módulos não endereçados que não eram distinguíveis pelo central, como mostrado na Figura 7. Isso pode ser feito usando vários módulos de satélite também.
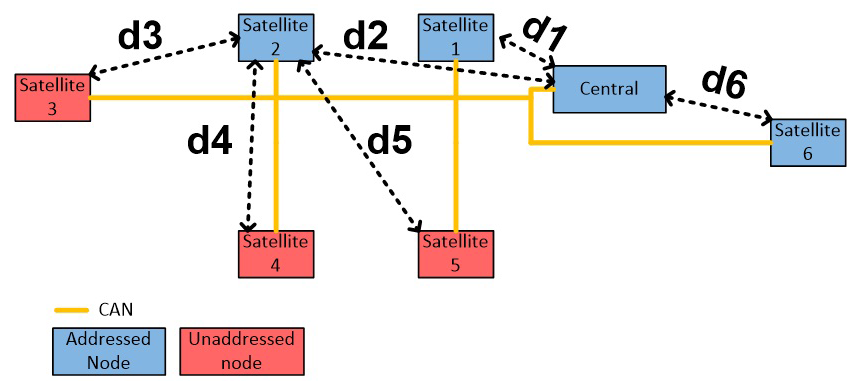
Figura 7. Um módulo de satélite previamente endereçado pode ser usado para localizar módulos não endereçados que não foram distinguidos pelo mestre.
Quando o módulo central é capaz de localizar os satélites 1, 2 e 6, mas não 3, 4 e 5, o módulo de satélite 2 é então usado para medir as distâncias para os módulos de satélite 3, 4 e 5. Novamente, desde que as medidas de distância são consistentes e não há sobreposição nas medidas de distância entre os módulos, os módulos satélite podem ser endereçados adequadamente e sempre serão endereçados na mesma ordem.
Implementação
Para ser consistente com a camada de perfil de acesso genérico (GAP) do protocolo Bluetooth Low Energy, devemos nos referir ao módulo central como um "scanner" e os módulos de satélite como "anunciantes". A camada GAP lida com os modos de acesso e procedimentos do dispositivo, incluindo descoberta de dispositivo, estabelecimento de link, terminação de link, inicialização de recursos de segurança e configuração de dispositivo. Os dois estados do dispositivo relevantes para o endereçamento automático são:
O anunciante responde com uma resposta de varredura; esse processo é chamado de descoberta de dispositivo. O dispositivo de digitalização está ciente do dispositivo de publicidade e pode iniciar uma conexão com ele. A Figura 8 mostra o fluxo do anunciante e do scanner abaixo.
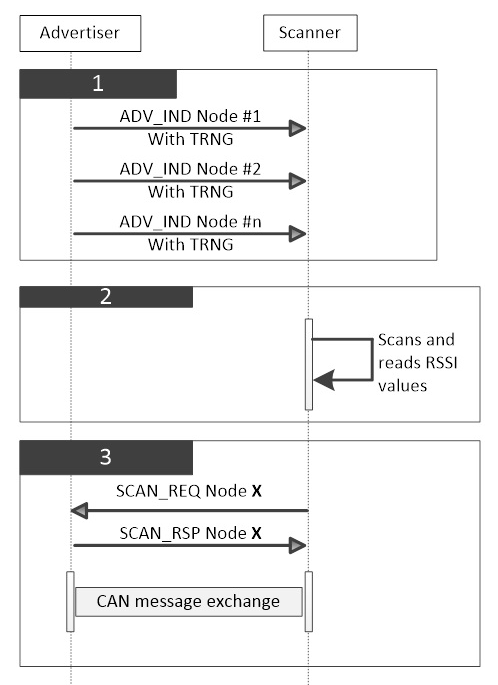
Figura 8. Este diagrama do software Bluetooth Low Energy mostra o fluxo do anunciante e do scanner.
Olhando para a Figura 8, todos os anunciantes estarão anunciando com dados específicos, eles irão gerar um verdadeiro número aleatório para ser usado como parte de seus dados de publicidade. Isso garante que não haja duplicação de nós.
O scanner fará a varredura várias vezes e lerá os valores RSSI de cada um dos anunciantes; ele fará a média dos valores RSSI para determinar o anunciante mais próximo a ele.
O scanner enviará uma solicitação SCAN ao anunciante mais próximo; então, ele transmitirá a mensagem CAN de endereço automático e aguardará o reconhecimento da mensagem CAN do anunciante.
O anunciante usará SCAN_REQ para habilitar o endereço automático CAN. Quando o anunciante receber a mensagem CAN de endereço automático, ele enviará a mensagem de reconhecimento CAN e interromperá a publicidade.
Essas etapas se repetem até que todos os anunciantes tenham sido endereçados automaticamente.
Resultados
O teste foi feito usando o design de referência do módulo de satélite Bluetooth Low Energy + CAN de acesso para carro, junto com um chicote de 12 pés. A separação entre cada conector era de cerca de 6 pés (Figura 9).
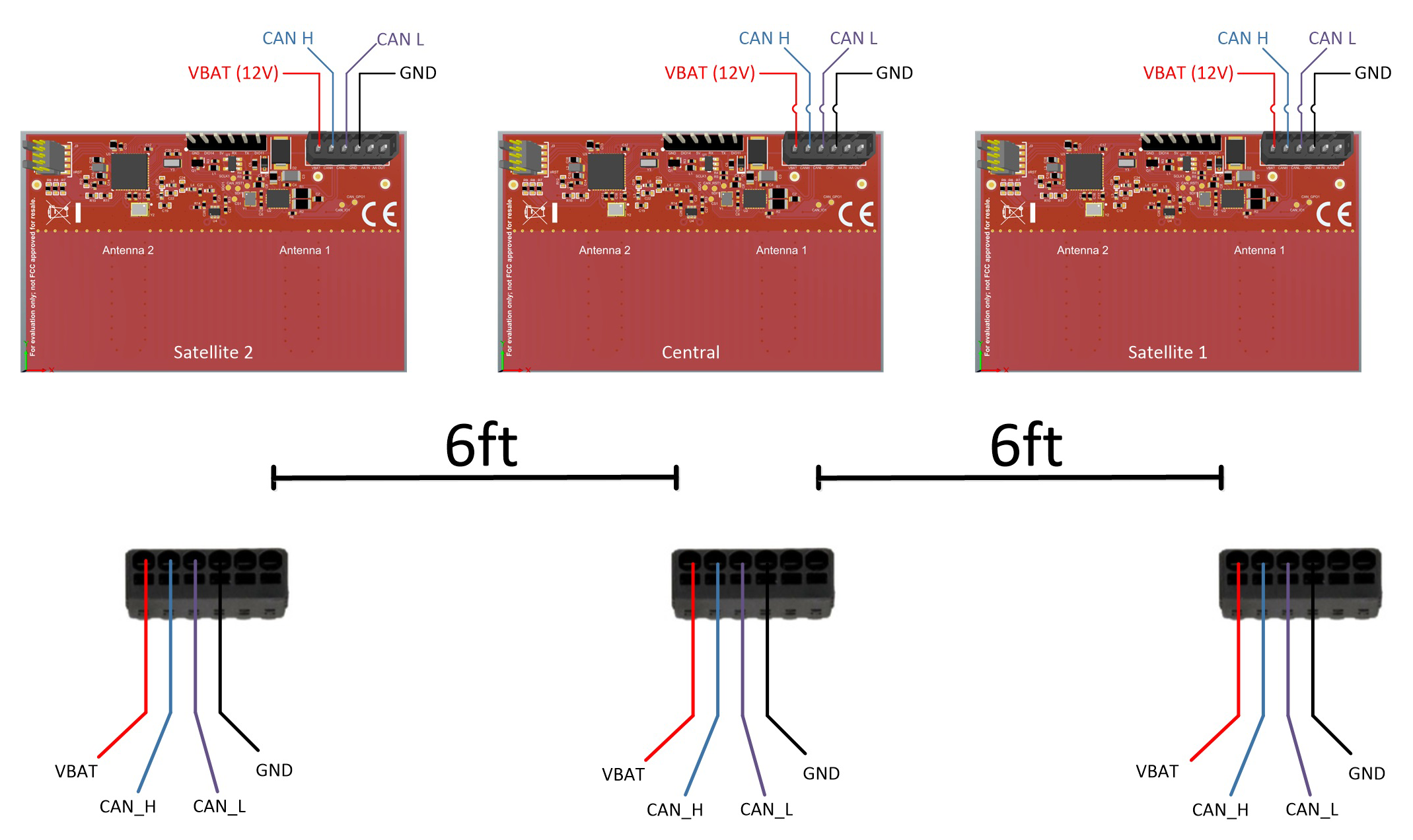
Figura 9. A configuração do hardware para teste inclui o design de referência TIDA-020032.
E as placas foram colocadas conforme mostrado na Figura 10 (onde d1 ~ 4 pés e d2 ~ 8 pés):
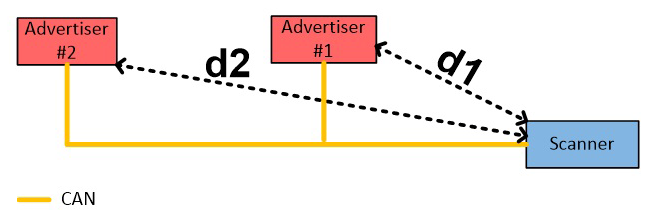
Figura 10. Este diagrama mostra a localização do hardware para teste.
Os parâmetros do Bluetooth Low Energy para o scanner foram uma duração de varredura de 1 s e uma janela e intervalo de varredura de 250 ms. Os parâmetros de Bluetooth Low Energy dos anunciantes para os anunciantes foram anunciados durante um intervalo de 100 ms. Durante cada período de medição, o scanner pegou 10 amostras RSSI por nó e calculou a média de cada conjunto de medições para produzir o valor de distância medido de cada anunciante.
Comparando três esquemas de endereçamento automático
Os resultados do teste anterior são resumidos na Tabela 1, que compara o atraso relativo, a confiabilidade e os custos de implementação de cada uma das três técnicas de endereçamento automático discutidas neste artigo.
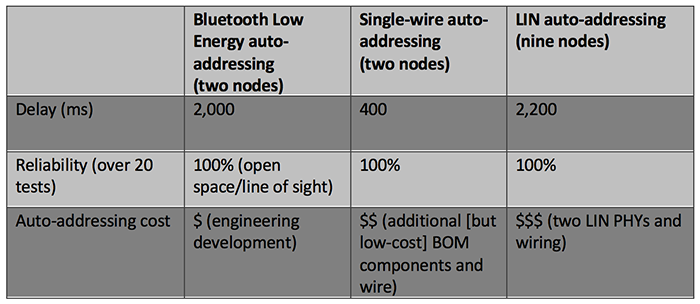
A Tabela 1 compara os resultados do nosso teste de endereçamento sem fio Bluetooth Low Energy com as duas técnicas de endereçamento automático com fio discutidas anteriormente. A partir desses resultados, parece que a técnica sem fio leva aproximadamente 5 vezes mais do que as técnicas com fio. Uma resposta melhor e mais rápida pode ser alcançada por um maior refinamento dos parâmetros da rede Bluetooth Low Energy; há espaço para melhorias. Isso exigirá mais testes porque a distância real pode variar da distância medida devido às características de propagação de RF associadas à localização particular de cada nó no veículo (ou seja, desafios fora da linha de visão).
O endereçamento automático sem fio é a solução mais otimizada em termos de custos do ponto de vista dos materiais, não exigindo nenhum hardware extra e nenhuma fiação extra entre os módulos. No entanto, para aproveitar essas vantagens, os projetistas do sistema precisarão realizar testes para fornecer o desempenho de RF para otimizar o software e contabilizar as imprecisões. Se você preferir uma abordagem com fio, o método de endereçamento automático com fio da TI requer a adição de alguns componentes pequenos e de baixo custo ao BOM, junto com os fios conectados entre cada módulo. Juntos, eles fornecem um conjunto de opções ao escolher um método para implementar recursos de endereçamento automático para sistemas de acesso automotivo Bluetooth.
* Para obter detalhes adicionais e resultados de teste sobre o método de endereçamento automático de fio único, consulte o guia de design de módulo de satélite CAN de Bluetooth Low Energy + CAN de acesso automotivo da Texas Instruments.
Referências
Integrado
- Construtor C#
- Classe aninhada C#
- Sobrecarga do construtor C#
- Projetando com Bluetooth Mesh:Chip ou módulo?
- Cervoz:DDR4 SO-DIMM de perfil muito baixo
- Chip de banda ultralarga permite acesso de veículos com base em smartphone
- Módulo Tiny Bluetooth 5.0 integra antena de chip
- Módulo de IA pequeno construído no Google Edge TPU
- Módulo front-end simplifica o design do WI-Fi 6
- ams:módulo acelera o desenvolvimento de hidrômetros ultrassônicos