


rDUINOScope
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 10 | |||
 |
| × | 1 | |||
| × | 1 |
Sobre este projeto


Descrição
O primeiro controle de telescópio independente baseado em Arduino do mundo, Goto.
Todos os controles de telescópio de código aberto disponíveis usam Raspberry Pi, que consome muita energia, ou usa o Arduino como extensão para um computador, smartphone ou tablet. rDUINOScope é o primeiro dispositivo autônomo baseado em Arduino que permite que astrônomos amadores aproveitem o céu noturno.
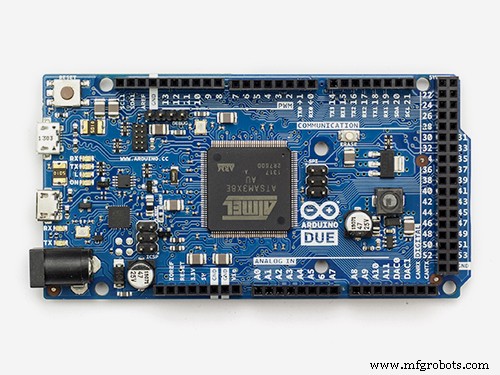
A ideia inicial era criar uma alternativa barata e fácil de construir aos produtos GOTO disponíveis comercialmente, como os fabricados pela SkyWatcher, Orion, Vixen e outros. Portanto, a arquitetura de hardware é construída em uma placa Arduino DUE e sensores baratos disponíveis no mercado. Instruções sobre como construir e guia do usuário foram criados no site do projeto. No coração do sistema está uma placa Arduino DUE, carregada com um software que é constantemente desenvolvido para adicionar funcionalidades.
rDUINOScópio com Stellarium:
Detalhes
rDUINOScópio é um sistema de controle de telescópio baseado em Arduino Due (GOTO) de código aberto. Desenhado como um sistema autônomo, o rDUINOScope não precisa de um PC, tablet ou telefone celular, nem conexão com a Internet para operar e fornecer vistas deslumbrantes!
Basicamente, ele tem um banco de dados com os OS MELHORES 250 objetos estelares (Catálogos de Tesouros Escondidos e Messier) e 200 estrelas , calcula sua posição no céu e aponta o telescópio. Os procedimentos de alinhamento implementados permitem uma experiência "sempre na ocular" ao girar para objetos selecionados e, uma vez que o objeto está na ocular, o sistema continua a rastreá-lo.
Caso, no entanto, você queira aproveitar as vantagens de seus dispositivos eletrônicos, #rDUINOScope utiliza comunicação Bluetooth (configuração sem fio) para conectar-se a todos os dispositivos eletrônicos e aceitar comandos baseados no protocolo de comunicação MEADE LX200.
O sistema funciona com motores de passo de todos os tipos e pode ser montado em montagens DIY ou em produtos disponíveis comercialmente como SkyWatcher, MEADE, Orion, Vixen e etc.
Funcionalidade:
O que há dentro do rDUINO SCOPE?
rDUINOScope Github
Instruções de construção
PASSO 1 Preparação
Antes de começar, é importante que você entenda como o software funciona para poder fazer alterações e personalizá-lo para você. Afinal, este é um dos pontos fortes mais significativos deste projeto!
Para entender esta parte, você precisa baixar o código dos Arquivos do projeto, junto com os arquivos "bibliotecas" ... ou simplesmente baixar o pacote completo em: http://rduinoscope.co.nf/downloads.php . Todos os números de linha referenciados estão de acordo com o código da V2.1. Boiana EQ
Você deve saber como funciona o código do Arduino. Normalmente o programa Arduino tem 2 seções - SETUP (); e LOOP (); SETUP () é executado no início do programa e basicamente utiliza o sistema; LOOP () é uma função de loop constante que dispara várias vezes por segundo. Portanto, para garantir que tenhamos telas, entradas de toque e etc. e que a tela não pisque por causa do LOOP (), precisamos inventar um mecanismo para permitir que o Arduino saiba o que o usuário espera que ele faça. Assim, na seção LOOP (), você verá uma parte muito pequena do código que diz apenas "Considere o toque .. ou considere o tempo ..." e etc. O resto das atividades acontecem dentro dessas funções que nos permitem alterar o fluxo do programa para que as telas não sejam atualizadas várias vezes por segundo.
Cálculos :Usei algumas informações encontradas na internet sobre como calcular a posição de objetos estelares. A maior parte das informações que coletei no seguinte link:http://www.stargazing.net/kepler/altaz.html - Descreve as fórmulas necessárias e abordagem para calcular o Ângulo Horário (HA), sabendo a localização, a hora atual e o objeto estelar RA e DEC.
Depois de criar o código para calcular
HA / linha 678:void calcularLST_HA () / , Usei esta página para verificar se funciona bem:http://www.jgiesen.de/astro/astroJS/siderealClock/ e, posteriormente, quando adicionei o banco de dados com objetos Messier, usei o Stellarium (http:// www.stellarium.org/) aplicação para os mesmos cheques. O principal problema que encontrei não foram as fórmulas em si, mas a maneira como o Arduino lida com os tipos de variáveis e, em particular, a precisão dos cálculos.
Agora, uma vez que temos HA e DEC calculados para um determinado objeto, queremos fazer o ponto de montagem do telescópio e, para isso, precisamos de alguma forma saber quanto exatamente os motores precisam girar. Para ter sucesso nisso, preciso saber qual é a relação entre o sem-fim e a engrenagem - ou seja, quantas voltas o sem-fim deve dar para que a engrenagem faça 360 °. Eu tenho o Vixen Super Polaris e uma pesquisa rápida na internet revelou que ele usa engrenagem de 144 dentes para eixos RA e DEC. Eu criei um arquivo Excel simples (* .XLS - http://rduinoscope.co.nf/downloads/Gears_Stepper_Calculation.xlsx) para calcular quanto os motores deveriam girar uma vez que calculei HA e DEC, e também com que freqüência para "disparar "motores para compensar a rotação da Terra.
Gears_Stepper_Calculation.xlsx
O mesmo modelo matemático que usei no XLS também está implementado no código, então o que você precisa fazer é simplesmente substituir os valores de sua montagem no início do código (linhas 34 a 37).
// AQUI VÃO AS informações de montagem, engrenagens e direção.// ... usado para calcular a proporção HourAngle para microSteps // ATUALIZE ESTA PARTE de acordo com sua CONFIGURAÇÃO // ------ --------------------------------------- // NB:RA e DEC usam o mesmo equipamento proporção (144 dentes no meu caso)! // --------------------------------------- ------- int WORM =144; int REDUTOR =4; // redução de marcha 1:4int DRIVE_STP =200; // Stepper drive tem 200 passos por revoluçãoint MICROSteps =16; // Usarei o modo de 1/16 microsteps para conduzir o sideral - também determina a velocidade MAIS BAIXA. Agora, uma vez que calculamos as razões, o código saberá quanto girar os motores a fim de apontar o telescópio para as coordenadas correspondentes e também qual é a velocidade do relógio para que a montagem possa rastrear o objeto. As funções que cuidam dos itens acima começam na linha 906 e na linha 917:
void Sidereal_rate () {} void cosiderSlewTo () {} Considerações :Você sabe, este não é um produto pronto para o consumidor. Ele permite que você o personalize de acordo com suas necessidades e, portanto, é muito flexível, mas com a flexibilidade vêm algumas desvantagens. Incluí esta seção de “considerações” para garantir que elas não sejam excluídas da sua lista de tarefas pendentes.
- Montagem de motores é uma tarefa simples, que, no entanto, influencia a maneira como seus cálculos devem funcionar. No meu cenário, o Vixen Super Polaris tem suas engrenagens originais colocadas no lado direito do eixo do sem-fim. No entanto, descobri que esses eixos eram curtos para substituir as engrenagens por polias e, portanto, movi as polias no lado oposto do eixo (à esquerda). Isso fez com que o motor realmente precisasse girar para trás para aumentar a posição do telescópio e, portanto, tive que revisar o código original que criei. Definitivamente, você deve revisar as direções em que seus motores giram, de outra forma, você acabará com a contagem incorreta das etapas, portanto, posição incorreta. Deixe-me mostrar o que quero dizer:veja a linha 1028 onde comando o motor para STP_BACK, mas na linha 1031 eu aumento o contador + =... (Todos os números de linha referenciados estão de acordo com o código de V2.1. Boiana EQ ).
if (SLEW_RA_microsteps> RA_microSteps) {digitalWrite (RA_DIR, STP_BACK); digitalWrite (RA_STP, HIGH); digitalWrite (RA_STP, LOW); RA_microSteps + =RA_mode_steps;} else {digitalWrite (RA_DIR, STP_FWD); digitalWrite (RA_STP, HIGH); digitalWrite (RA_STP, LOW); RA_microSteps - =RA_mode_steps;}
AÇÃO: Revise as seguintes partes do código: void consider_Manual_Moveint xP, int yP ), void cosiderSlewTo () e void Sidereal_rate ().
- Norte VS. Sul Hemisférios:O código também inverte o movimento FORWARD dependendo do hemisfério em que você está localizado. Isso é feito em uma parte do código, onde cuido das entradas de toque. Pode ser necessário revisar a seção de código.
- Engrenagem nos eixos DEC e RA :Meu código funciona assumindo que os eixos DEC e RA usam uma engrenagem de 144 dentes. Este é o caso do Vixen Super Polaris. Caso você tenha uma configuração diferente, pode ser necessário revisar algumas partes do código. Se você tiver problemas para identificar essas partes do código, mande-me uma mensagem e tentarei ajudá-lo!
Planeje suas atividades: Agora chegamos a um ponto em que precisamos planejar nossas atividades para realmente construir o sistema rDUINO Scope GoTo. A estimativa aproximada é que você deve ser capaz de completar o sistema em 2-3 dias, considerando que você tem tudo o que é necessário (hardware, ferramentas e materiais). Levei algo como 4-5 meses para concluí-lo, considerando que eu só conseguia trabalhar durante a noite (não todas as noites), e também precisava fazer muitas pesquisas. Juntar tudo me levou a:
- 1 dia para construir o painel Shield e melhorar o sistema
- 1 dia para embalar tudo em uma caixa
- 1 dia para consertar motores e polias na montagem
PASSO 2 Materiais
Agora, como sabemos basicamente como o programa funciona, você precisa planejar suas compras e obter os materiais necessários.
Lista de materiais :A maioria dos materiais que usei são comprados de fornecedores chineses na Internet. Poucos deles, porém, decidi comprar localmente principalmente porque eram considerados bons e eu queria evitar atrasos:GPS, Bluetooth e Joystick. Custou-me cerca de $ 190 USD para conseguir tudo isso, então é realmente um custo baixo em comparação com o quão caro é comprar tal sistema de fabricantes. Você pode encontrar a lista de materiais junto com seus preços e onde você pode comprá-los no site do projeto:http://rduinoscope.co.nf/rDUINO_step2.html, mas a lista também está disponível neste site na seção "COMPONENTES" .
Se você puder encontrá-los mais baratos ou entregá-los mais rápido, eu sugiro fortemente que você faça isso.
Além disso, dependendo do seu projeto, você pode precisar de 40 pinos. cabo com conectores para o TFT, alguns parafusos plásticos para prender o joystick, cabo USB para garantir que o Arduino Due ainda é programável quando fechado na caixa, ventilador e outros.
Se você não os tem em casa (como eu não tinha), também deve comprar alguns materiais de solda, solda, pinças, multímetro digital e outros.
Software de que você precisará :Uma parte importante da construção de seu rDUINOScope é baixar e instalar o IDE do Arduino e todos os softwares relacionados (drivers, definições de placa e bibliotecas). Siga a lista abaixo para instalar o necessário em seu computador:
- Acesse o site do Arduino e baixe o IDE:https://www.arduino.cc/en/Main/Software. Instale o software - assim que o software for instalado, ele também instalará os drivers necessários para que seu computador reconheça a placa Arduino quando conectado.
- Execute o Arduino IDE e navegue até: Ferramentas -> Tabuleiro -> Gerente de Conselhos , uma vez lá Baixe e instale a definição da placa Arduino Due “Placas Arduino SAM (ARM Cortex-M3 de 32 bits)”;
- Baixe o pacote de bibliotecas que usei como parte do programa e copie e cole na pasta “bibliotecas” de sua instalação do Arduino IDE. (NOTA:"bibliotecas" é uma pasta em seu computador, mas também é uma pasta dentro do PACOTE COMPLETO disponível no site do projeto: http://rduinoscope.co.nf/downloads.php , então o que você precisa fazer é baixar o pacote, renomear a extensão para .ZIP, abri-lo e copiar o conteúdo da pasta "_libraries" do ZIP para a pasta "libraries" do seu computador.)
- Reinicie o IDE e abra o arquivo do programa principal - “_02_Boiana_EQ.ino”. Você perceberá que mais 4 arquivos serão abertos em TABs separados. Esses são arquivos de suporte que cuidam de diferentes partes do software.
Agora você deve ser capaz de compilar o código e carregá-lo na placa do Arduino Due depois de conectar o Arduino ao seu computador.
Nota: Caso você não saiba como funciona o IDE do Arduino e o que precisa ser feito para programar o Arduino, consulte o site e os tutoriais:https://www.arduino.cc/en/Tutorial/HomePage
PASSO 3 Montagem
Para obter instruções mais detalhadas, visite o site do projeto:http://rduinoscope.co.nf/rDUINO_step3.html
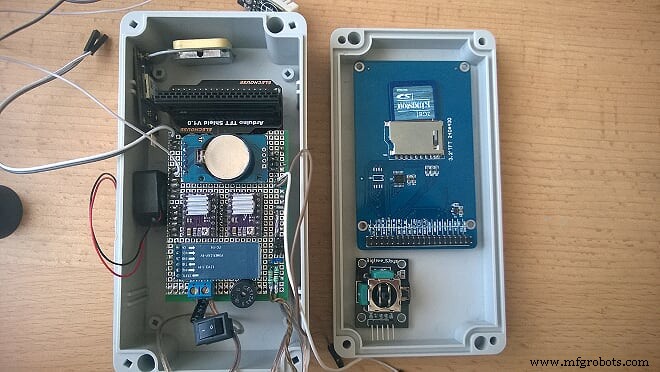
Agora é a hora de criar o painel Shield. Uma placa Shield é uma placa com pinagens que você empilha na parte superior da placa ArduinoDUE. Alguns dos componentes precisam estar na placa e alguns estão melhor posicionados na caixa do gabinete. Minha divisão é assim:
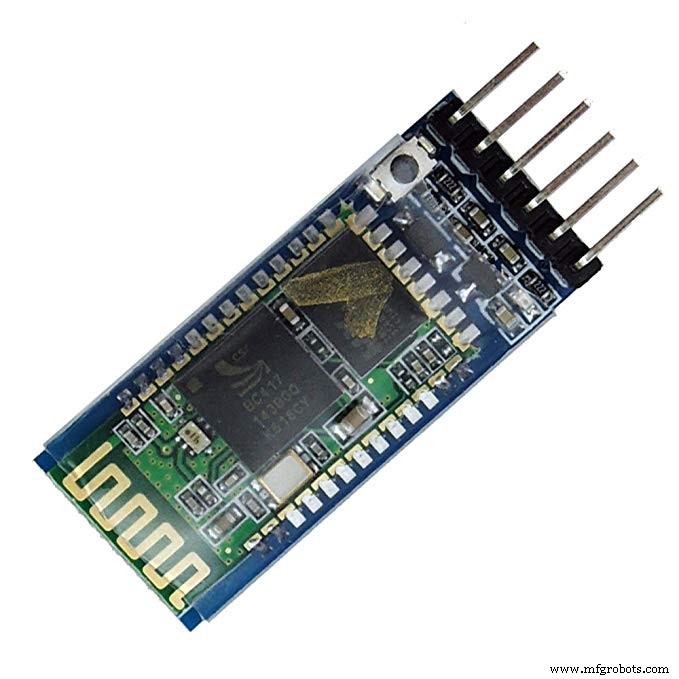
- Suporte da placa de proteção:ambas as unidades DRV8825, relógio RTC3231, módulo Bluetooth HC-05, Piezo speker, conector para 12V e pinagem para os componentes restantes;
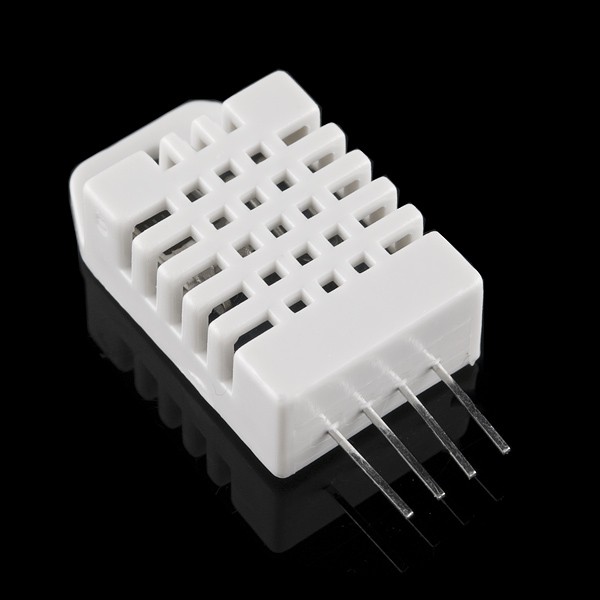
- Os componentes instalados na caixa são:Módulo GPS NEO 6M - RX para que a antena sempre aponte para o céu, sensor de temperatura DHT22 preso fora da caixa através de um orifício, joystick PS2, tela TFT e todos os interruptores (LIGADO Interruptor / OFF e interruptor de modo Dia / Noite). Além disso, fiz furos para os conectores dos drives do motor, conector da fonte de alimentação de 12 V e uma porta de cabo USB que vai para a porta Nativa do ArduinoDUE para permitir atualizações de software sem abrir a caixa.
Como conectar componentes à placa ARDUINO DUE:
Componente .... Pino de hardware .... Pino de Arduino
GPS
- GPS NEO 6M .... RX .... 16
- GPS NEO 6M .... TX .... 17
RTC
- RTC DS3231 .... SDA .... A4
- RTC DS3231 .... SCL .... A5
Bluetooth
- BT HC-05 .... TXD .... 14
- BT HC-05 .... RXD .... 15
DHT
- DHT22 .... out .... 3
Palestrante
- Alto-falante piezo .... 2
PS2
- joystick PS2 .... VRx .... A1
- joystick PS2 .... VRy .... A0
Declinação DRV8825
- DEC DRV8825 .... PASSO .... 6
- DEC DRV8825 .... DIR .... 7
- DEC DRV8825 .... M0 .... 10
- DEC DRV8825 .... M1 .... 9
- DEC DRV8825 .... M2 .... 8
- DEC DRV8825 .... REINICIAR DEC DRV8825 .... DORMIR
Ascenção Direita DRV8825
- RA DRV8825 .... PASSO .... 4
- RA DRV8825 .... DIR .... 5
- 3V
- RA DRV8825 .... M0 .... 11
- RA DRV8825 .... M1 .... 13
- RA DRV8825 .... M2 .... 12
- RA DRV8825 .... REINICIAR RA DRV8825 .... DORMIR
Tela TFT
- use com escudo TFT .... pinos (22-53) + SPI
- Dia / Noite .... Interruptor de modo .... A3
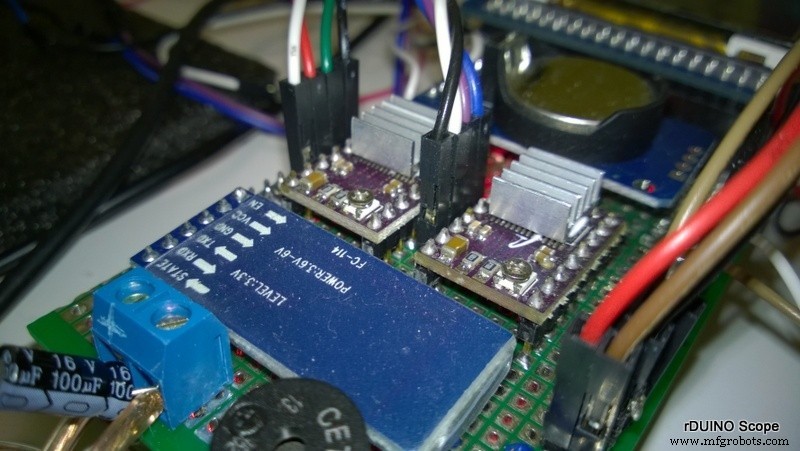
Certo ... Agora estamos prontos para montar o Shield Board. Pegue uma placa de circuito impresso de prototipagem e avalie como cortá-la, para que ela possa conter todos os componentes para ter algum espaço para a fiação e ter a pinagem soldada de forma que possa ser empilhada em cima do Arduino. Observe que você precisa soldar todos os pinos usados pelo Arduino e conectá-los aos componentes na placa de blindagem ou a um conector nesta placa de blindagem para que os componentes colocados na própria caixa possam ser conectados também.
Estou incluindo abaixo algumas fotos do processo:
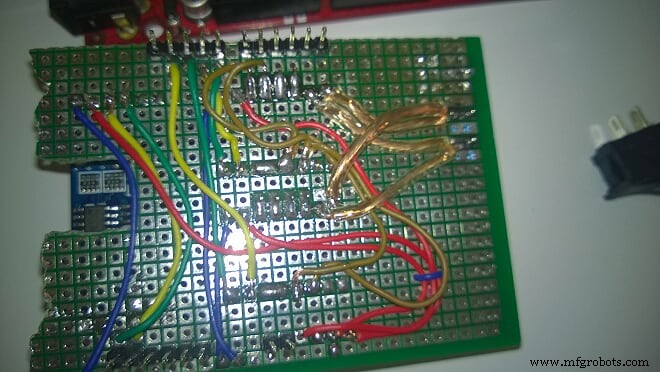

Feito isso, conectei a placa e testei o escudo! Não estava funcionando! :( Eu verifiquei a fiação e descobri que criei uma ponte entre 2 conexões e tive que consertar. Observe que a partir deste momento comecei a verificar todos os problemas de solda, pois realmente tive a sorte de não queimar meu Arduino ou qualquer outra coisa com a fiação errada. NB:Certifique-se de verificar todas as conexões! Certifique-se de seguir o seguinte diagrama de fiação para o DRV8825 e os drives do motor, pois é importante.
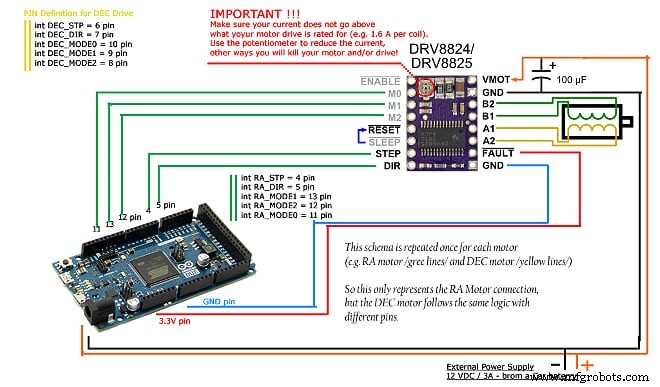
Certifique-se de usar um adaptador de energia adequado (12 V, 1,6 A) e conectar os drives do motor antes de ligar a energia! NB:Nunca conecte os drives do motor quando o DRV8825 estiver sob carga, pois isso pode queimar os drivers!
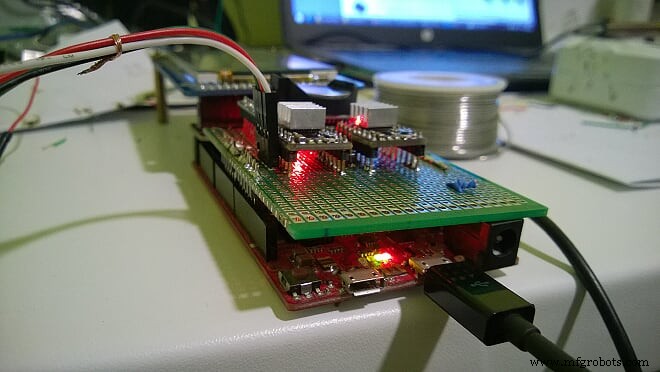
Agora que todos os componentes estão soldados no lugar, sugiro que você também conecte os drives do motor, carregue o software na placa Arduino e teste toda a configuração. Deve funcionar sem falhas neste ponto.
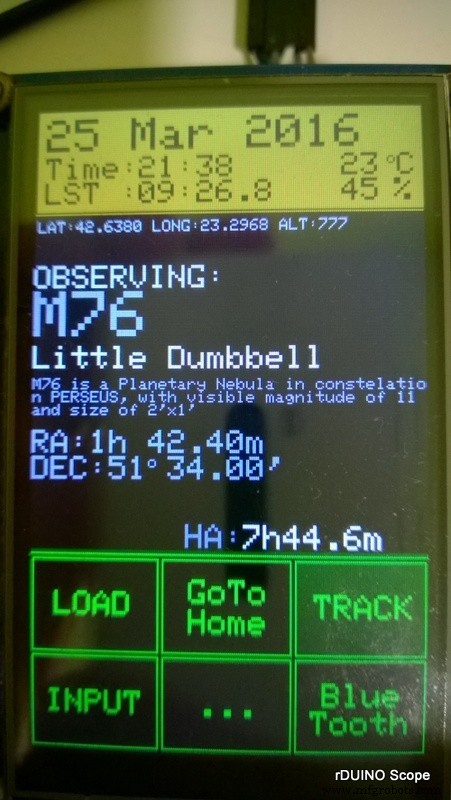
Agora você deve ser capaz de brincar com o software e conhecer a interface do usuário. Para ajudar na interface, criei uma página do GUIA DO USUÁRIO no site do projeto:http://rduinoscope.co.nf/guide.html
Sua configuração deve ser semelhante a esta:

PASSO 4 Embale juntos
Assim que a placa de blindagem estiver pronta, pegue a caixa e comece a dispor todos os componentes restantes e planeje onde você precisa fazer os furos e que formato e tamanho. A melhor maneira de fazer buracos é com um canivete pequeno (pelo menos para mim). Realmente não importa se é um buraco redondo ou quadrado. Você pode cortá-lo facilmente com uma pequena faca afiada.
A única exceção é para a tela, onde você realmente precisa de um orifício longo, plano e quadrado. Pedi ajuda e meu pai o fez em suas máquinas de corte.
Assim que estiver satisfeito com o layout e considerá-lo factível, comece a cortar os orifícios. É um processo longo e cria alguma confusão, mas não deve demorar mais do que 2 a 3 horas. Às vezes eu usava brocas quando precisava fazer orifícios circulares, por exemplo:conector de alimentação de 12V, conectores de motor RA e DEC.
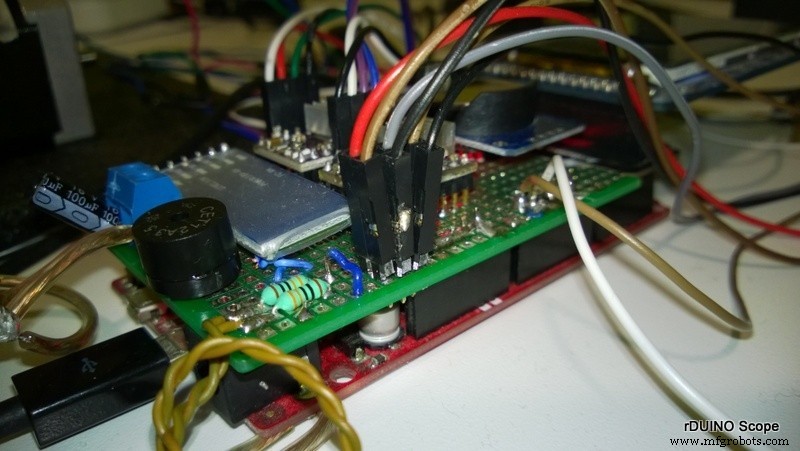
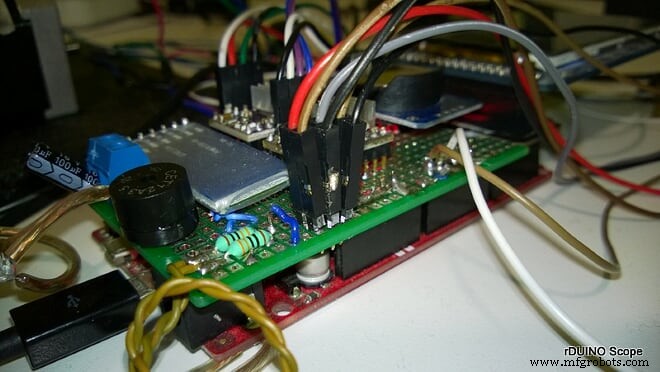
Prepare sua pistola de cola quente e comece a colar os componentes a quente na caixa, conforme mostrado abaixo:




Agora tudo está conectado e embalado, exceto o componente na face frontal da caixa. Decidi colocar lá a tela TFT, o joystick do PS2 e o botão Day / Night Mode. Quando cheguei à tela TFT, criei uma conexão simples de cabo de fita com conectores macho e fêmea e conectei à tela. No entanto, isso não funcionou! O motivo é que os pinos foram espelhados e, como tal, a tela TFT não pode mais funcionar. Portanto, decidi trabalhar em algumas conversões complicadas de 2D para 3D e descobrir os conectores que tinha com o cabo plano para resolver o problema
Longa história, resumindo: Não é uma ciência de foguetes, mas me deu alguns momentos difíceis até que eu descobrisse uma solução. Uma solução feia, mas funcionou e ainda funciona um ano depois. Abaixo você pode ver o que quero dizer.
Basicamente, o que você vê aqui é:
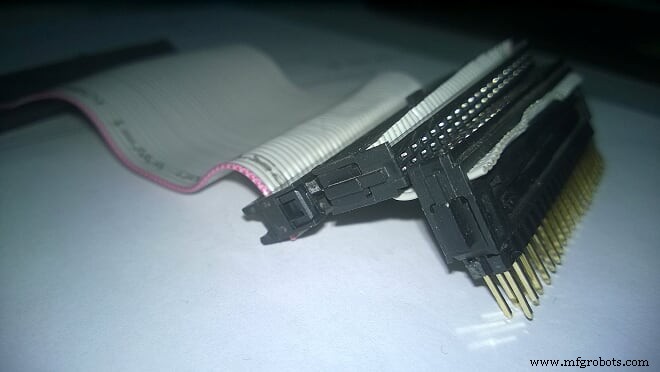

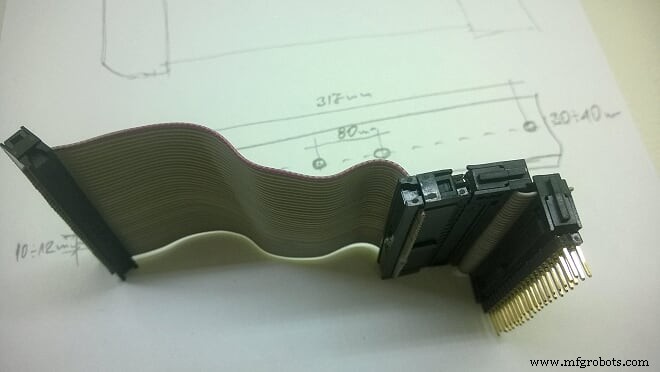
- Cabo fita
- conectores fêmea de 40 pinos
- pinos para soldar em um corte de PCB para formar matriz (2 x 20 pinos)
Funcionou como um encanto e me permitiu completar a caixa!






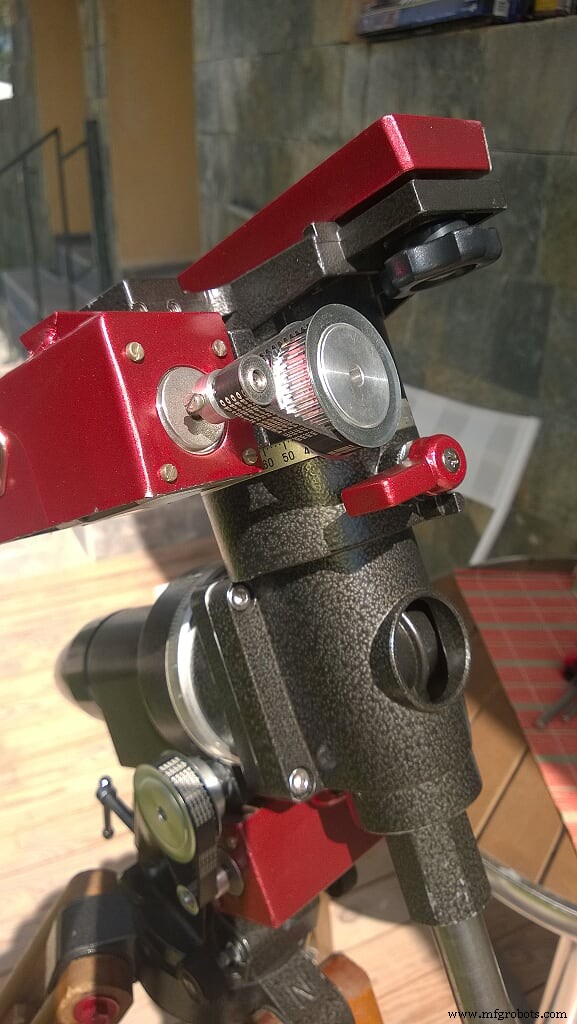
PASSO 5 O Monte Equatorial Alemão
Por mais que eu queira compartilhar com você como conectar os drives do motor à sua montagem, não posso. A verdade é que qualquer fabricante cria o seu próprio design e, como tal, não existe uma solução que funcione para todos.
Eu uso o Vixen Super Polaris dos anos 80 e o método abaixo funciona para isso. Preciso lembrar que as decisões que você tomou na ETAPA 1 onde você precisava alterar os valores no código agora afetará nosso trabalho. Abaixo você pode ver minha configuração de polias e correias.
Comprei 2 conjuntos para minha configuração. Só não tinha certeza de como funcionaria e comprei um conjunto com redução 1:4 e um conjunto com redução 1:3. O tamanho da correia também deve ser diferente porque a redução afeta a distância entre as duas polias. Admito que, com um bom planejamento e design, você pode decidir antecipadamente como proceder e poupar algum dinheiro, mas eu estava com pressa. Eu precisava fazer funcionar!

Depois de colocar as correias, roldanas e o suporte na minha frente, decidi que a melhor abordagem para mim seria usar a redução 1:4 porque tudo parecia encaixar perfeitamente no suporte e comecei a trabalhar na carcaça do motor. Depois de meio dia, consegui pensar nisso:
Testei toda a configuração e tive que fazer algumas alterações no software (atualizar os valores das variáveis para 4 na linha 35) para que representasse minha decisão final de projeto. Testei novamente e tudo funcionou perfeitamente.


Tive que esperar por uma boa noite estrelada para poder testá-lo corretamente, mas enquanto esperava, percebi que algo não estava certo!
Eu tinha o melhor sistema GOTO de controle de telescópio, muito melhor do que o que posso comprar com meu orçamento de hobby, mas não parecia certo. Precisou de alguns retoques finais, o que mais tarde me deixou orgulhoso do meu rDUINOScópio!
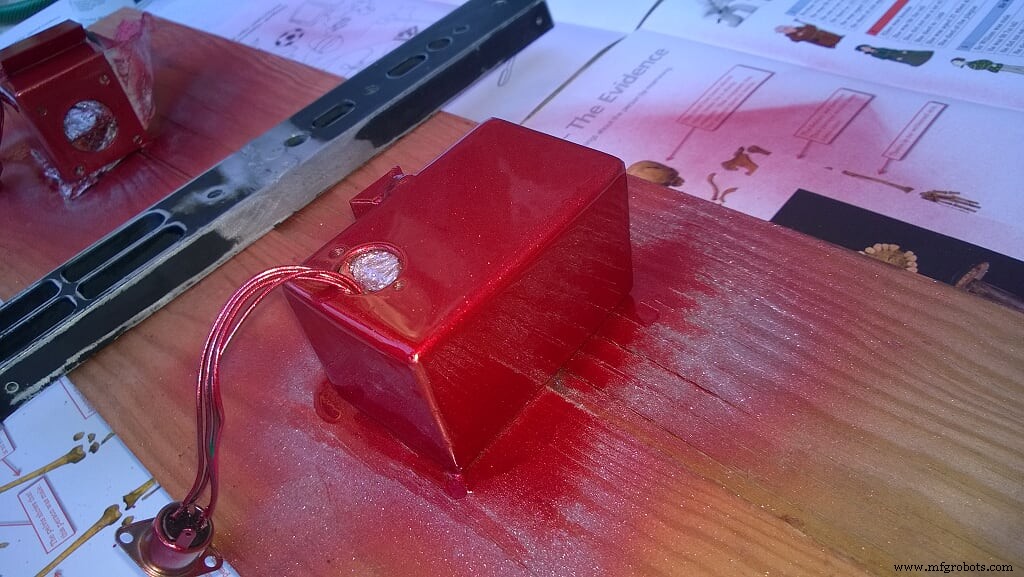
Finalmente, meu rDUINOScópio Vixen SP Ferrari tem a aparência que eu acho que deveria ter!


Arquivos
_READ_ME.txt:Descrição da versão final v.2.1 Boiana EQ junto com alguns F.A.Q.
_READ_ME.txt
_02_Boiana_EQ.ino:Arquivo Arduino principal
_02_Boiana_EQ.ino
graphic_screens.ino:GRAPHICS FILE - vinculado ao arquivo principal
graphic_screens.ino
touch_inputs.ino:TOUCH INPUTS FILE - vinculado ao arquivo principal
touch_inputs.ino
BT.ino:BLUETOOTH COMMUNNICATION - vinculado ao arquivo principal
BT.ino
regular_updates.ino:TIME UPDATES - vinculado ao arquivo principal
regular_updates.ino
Código
- Snippet de código # 1
- Snippet de código # 3
Snippet de código # 1 Texto simples
// AQUI VAI A informação de montagem, engrenagens e direção.// ... usada para calcular a proporção HourAngle para microSteps // ATUALIZE ESTA PARTE de acordo com sua CONFIGURAÇÃO // --------- ------------------------------------ // NB:RA e DEC usam a mesma relação de engrenagem (144 dente no meu caso)! // ------------------------------------------ ---- int WORM =144; int REDUTOR =4; // redução de marcha 1:4int DRIVE_STP =200; // Stepper drive tem 200 passos por revoluçãoint MICROSteps =16; // Usarei o modo de 1/16 microsteps para conduzir sideral - também determina a velocidade MAIS BAIXA.
Snippet de código # 3 C / C ++
if (SLEW_RA_microsteps> RA_microSteps) {digitalWrite (RA_DIR, STP_BACK); digitalWrite (RA_STP, HIGH); digitalWrite (RA_STP, LOW); RA_microSteps + =RA_mode_steps;} else {digitalWrite (RA_DIR, STP_FWD); digitalWrite (RA_STP, HIGH); digitalWrite (RA_STP, LOW); RA_microSteps - =RA_mode_steps;} Github
https://github.com/dEskoG/rDUINOScopehttps://github.com/dEskoG/rDUINOScopeEsquemas
Como conectar motores de passo e DRV8825 e conectá-los ao Arduino DUE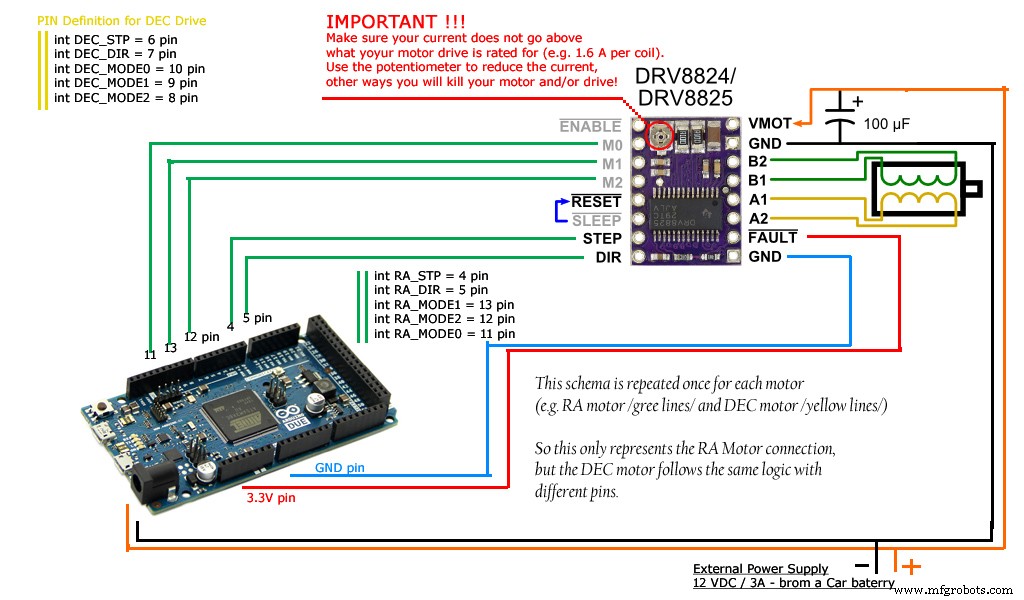 How to wire all all sensors and conenct to Arduino DUE
How to wire all all sensors and conenct to Arduino DUE 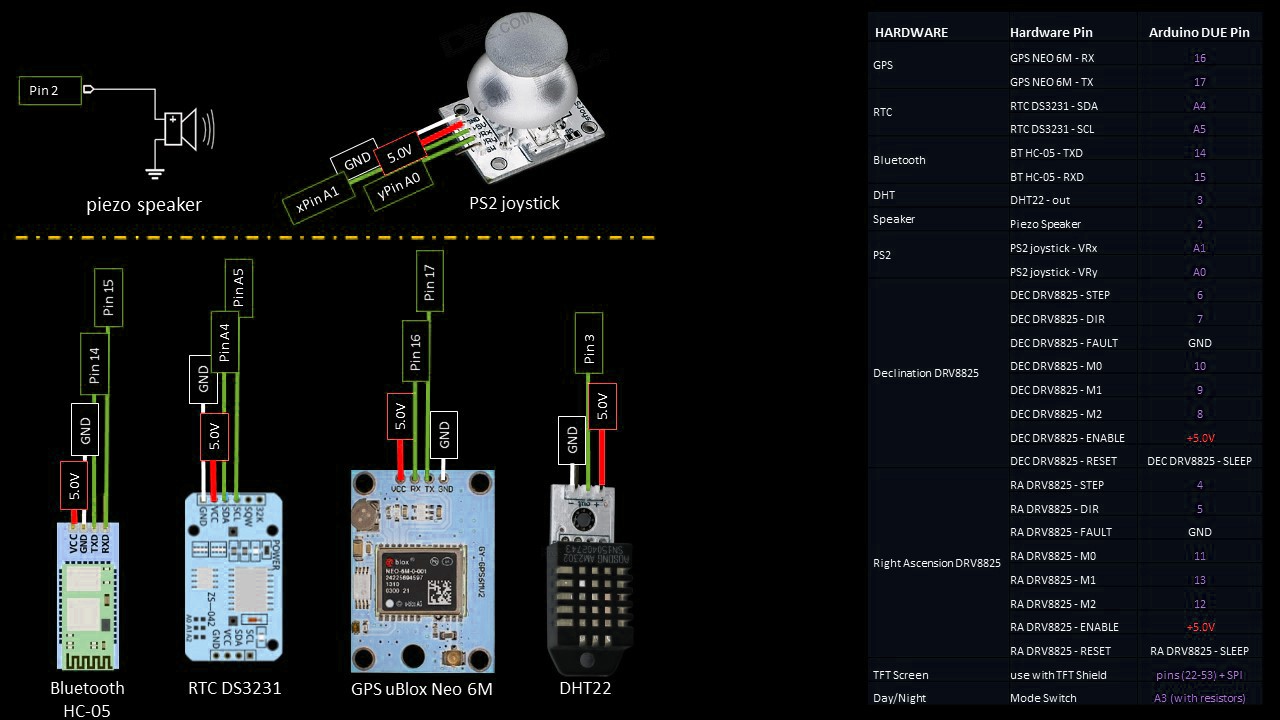
Mini estação meteorológica usando Arduino Nano
Rastreamento GPS usando Helium, Hub IoT do Azure e Power BI
Processo de manufatura