


Otimizando a detecção de inclinação / ângulo de alta precisão:Estabelecendo o desempenho de linha de base
Na primeira parte desta série, revisamos a estrutura interna de um acelerômetro MEMS de 3 eixos de alta precisão. Neste segundo artigo, revisaremos como adquirir um bom conjunto de dados inicial para estabelecer o desempenho da linha de base e validar que tipo de níveis de ruído esperar nas análises de dados subsequentes.
Embora a saída analógica de um acelerômetro possa se conectar a qualquer sistema analógico de aquisição de dados para análise de dados, os fabricantes costumam fornecer placas de avaliação otimizadas para serem colocadas diretamente nos sistemas do cliente para facilitar a prototipagem com os sistemas embarcados existentes. Para fins ilustrativos deste artigo, foi usada a placa de avaliação de fator de forma pequeno EVAL-ADXL35x. Para registro e análise de dados, o EVAL-ADXL35x foi conectado a uma placa de microcontrolador SDP-K1 e programado usando o ambiente Mbed. Mbed é um ambiente de desenvolvimento de código aberto e gratuito para placas de microcontrolador baseadas em ARM. Ele tem um compilador online e permite aos desenvolvedores começar rapidamente. A placa SDP-K1, quando conectada ao PC, mostra-se como uma unidade externa. Para programar a placa, simplesmente arraste e solte o arquivo binário gerado pelo compilador na unidade SDP-K1. 3, 4
Uma vez que o sistema Mbed está registrando dados por meio do UART, agora temos um ambiente de teste básico para experimentar experimentos de acelerômetro e transmitir a saída para um terminal simples para registro de dados e análise posterior. É importante notar que, independentemente da taxa de dados de saída do acelerômetro, o código Mbed registra apenas a 2 Hz. Log mais rápido do que isso é possível no Mbed, mas está fora do escopo deste artigo.
Um bom conjunto de dados inicial ajuda a estabelecer o desempenho de linha de base e validar que tipo de níveis de ruído esperar na maioria de nossas análises de dados subsequentes. Usando um braço articulado do torno do PanaVise 5 que tem uma montagem de ventosa permite uma superfície de trabalho razoavelmente estável em uma configuração de bancada, uma vez que adere à superfície de trabalho de vidro. A placa ADXL355 (presa lateralmente) é tão estável quanto a bancada do laboratório nesta configuração. Usuários avançados mais avançados podem notar que este suporte de torno teria algum risco de tombamento, mas é um método simples e econômico que permite alterar a orientação em relação à gravidade. Com a placa ADXL355 colocada na montagem conforme mostrado na Figura 1, um conjunto de dados por 60 segundos é capturado para uma primeira análise.
clique para ver a imagem em tamanho real
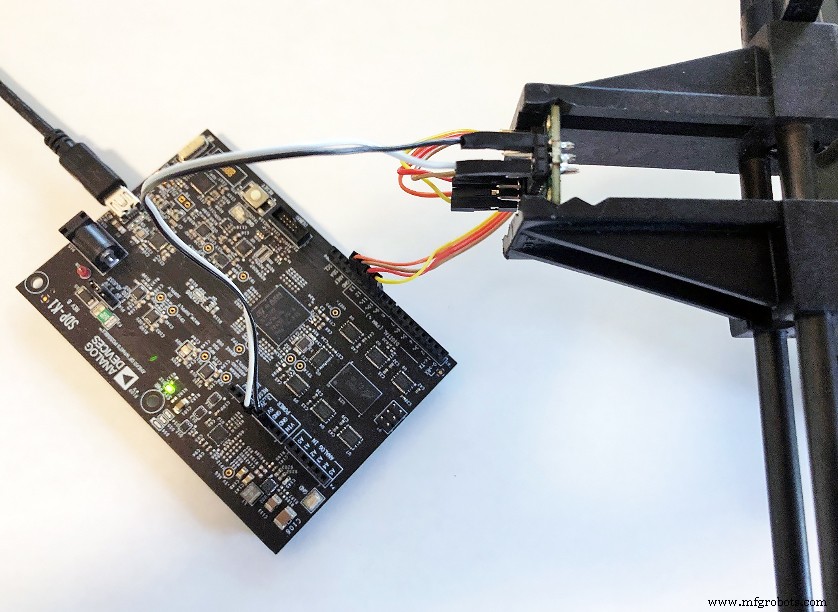
Figura 2. Configuração de teste usando uma montagem EVAL-ADXL35x, SDP-K1 e PanaVise. (Fonte:Dispositivos analógicos)
clique para ver a imagem em tamanho real
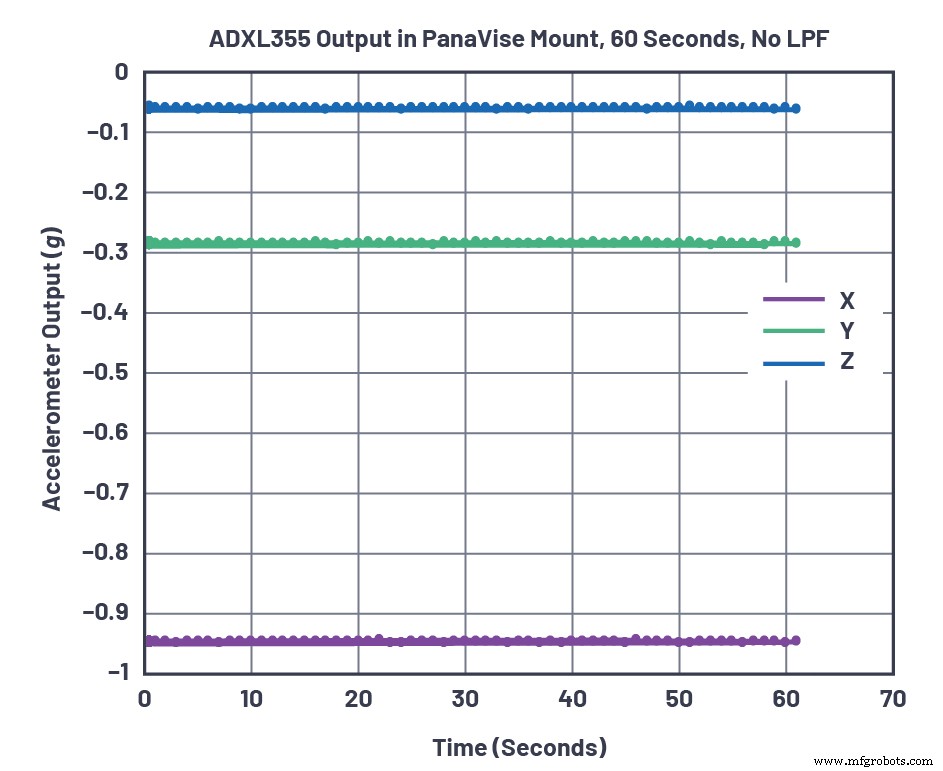
Figura 2. Dados ADXL355 sem filtro passa-baixa (registro 0x28 =0x00), obtidos em 1 minuto. (Fonte:Dispositivos analógicos)
Pegando os 120 pontos de dados e medindo um desvio padrão mostra ruído na faixa de 800 μ g a 1,1 m g . A partir das especificações de desempenho típicas do ADXL355 na folha de dados, vemos a densidade de ruído listada como 25 µ g / √Hz. Com as configurações padrão do filtro passa-baixa (LPF), o acelerômetro tem uma largura de banda de cerca de 1000 Hz. O ruído seria então esperado em 25 µ g / √Hz × √1000 Hz =791 µ g rms, assumindo um filtro de parede de tijolos. Este primeiro conjunto de dados passa no primeiro teste de detecção. Para ser preciso, a conversão de densidade espectral de ruído em ruído rms deve ter um fator para representar o fato de que o LPF digital não tem um roll-off infinito (ou seja, um filtro de parede de tijolos). Alguns usam um coeficiente de 1,6 × para uma filtragem simples RC monopolar de 20 dB / década, mas o filtro passa-baixo digital ADXL355 não é um filtro RC monopolar. Em qualquer caso, assumir um coeficiente entre 1 e 1,6 pelo menos nos coloca na aproximação certa para as expectativas de ruído.
Para muitas aplicações de detecção de precisão, 1000 Hz é uma largura de banda muito ampla para os sinais que estão sendo medidos. Para ajudar a otimizar o espaço de troca entre largura de banda e ruído, o ADXL355 possui um filtro passa-baixo digital integrado. Para o próximo teste, definimos o LPF como 4 Hz, que deve ter uma redução líquida de ruído por um fator de √1000 / √4 ≈ 16. Isso é feito simplesmente no ambiente Mbed usando a estrutura simples mostrada na Figura 3 , enquanto os dados são mostrados na Figura 4.
6
Após a filtragem, o ruído caiu comprovadamente conforme o esperado. Isso é mostrado na Tabela 1 abaixo.
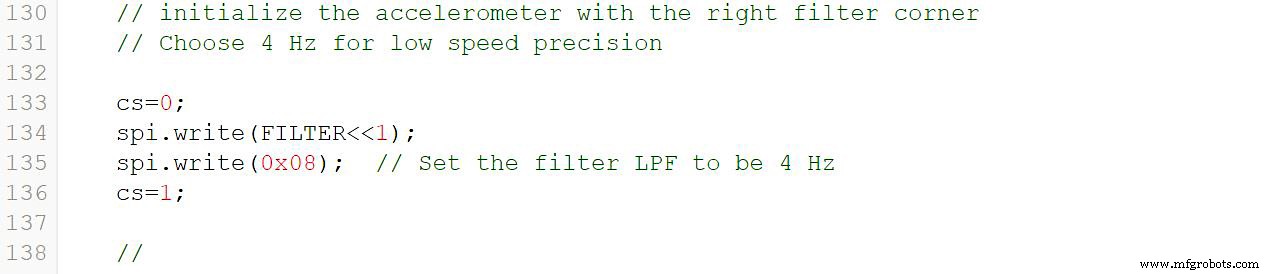
Figura 3. Código Mbed para configurar um registro. (Fonte:Dispositivos analógicos)
clique para ver a imagem em tamanho real
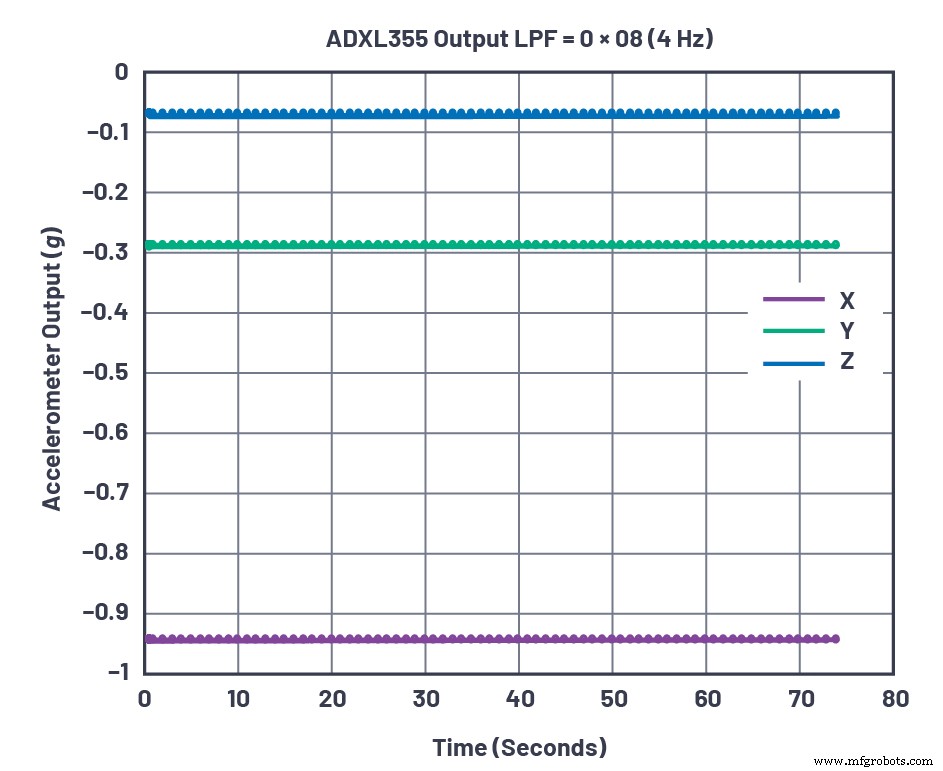
Figura 4. Dados ADXL355 com LPF definido para 4 Hz (registro 0x28 =0x08), obtidos em 1 minuto. (Fonte:Dispositivos analógicos)
Tabela 1. Ruído esperado e medido do ADXL355 (Fonte:Dispositivos analógicos)
NoiseXYZ Teórico
(μg) Medido
(μg) Teórico
(μg) Medido
(μg) Teórico
(μg) Medido
(μg) Sem Filtro79192379111397918054 Filtro Hz5058501855063
A Tabela 1 mostra que o ruído no eixo y com a configuração atual é maior do que o esperado pela teoria. Depois de investigar as causas prováveis, notamos que a vibração adicional do ventilador do laptop e de outros equipamentos de laboratório provavelmente se manifesta no eixo y como ruído. Para testar isso, a morsa foi girada para colocar o eixo x na posição onde o eixo y estava para este teste e o eixo de maior ruído se moveu para o eixo x. A diferença de ruído entre os eixos então parece ser o ruído da instrumentação e não uma diferença intrínseca nos níveis de ruído entre os eixos do acelerômetro. Este tipo de teste é efetivamente o teste “Hello World” para um acelerômetro de baixo ruído, por isso dá confiança em testes posteriores.
Para ter uma noção de quanto efeito um choque térmico teria no ADXL355, pegamos uma pistola de ar quente
7
e coloque-o no modo de ar mais frio (praticamente alguns graus acima da temperatura ambiente) para aplicar tensões térmicas ao acelerômetro. A temperatura também é registrada usando o sensor de temperatura integrado do ADXL355. O experimento usou a morsa para colocar o ADXL355 verticalmente de modo que uma pistola de ar possa soprar ar na parte superior da embalagem. O resultado esperado desse experimento é que o coeficiente de temperatura do deslocamento apareceria conforme a matriz esquenta, mas quaisquer tensões térmicas diferenciais apareceriam quase instantaneamente. Em outras palavras, se o eixo individual de detecção for sensível ao estresse térmico diferencial, espera-se ver um aumento na saída do acelerômetro. Remover o valor médio dos dados durante o silêncio permite uma comparação fácil de todos os três eixos ao mesmo tempo. Os resultados são mostrados na Figura 5.
clique para ver a imagem em tamanho real
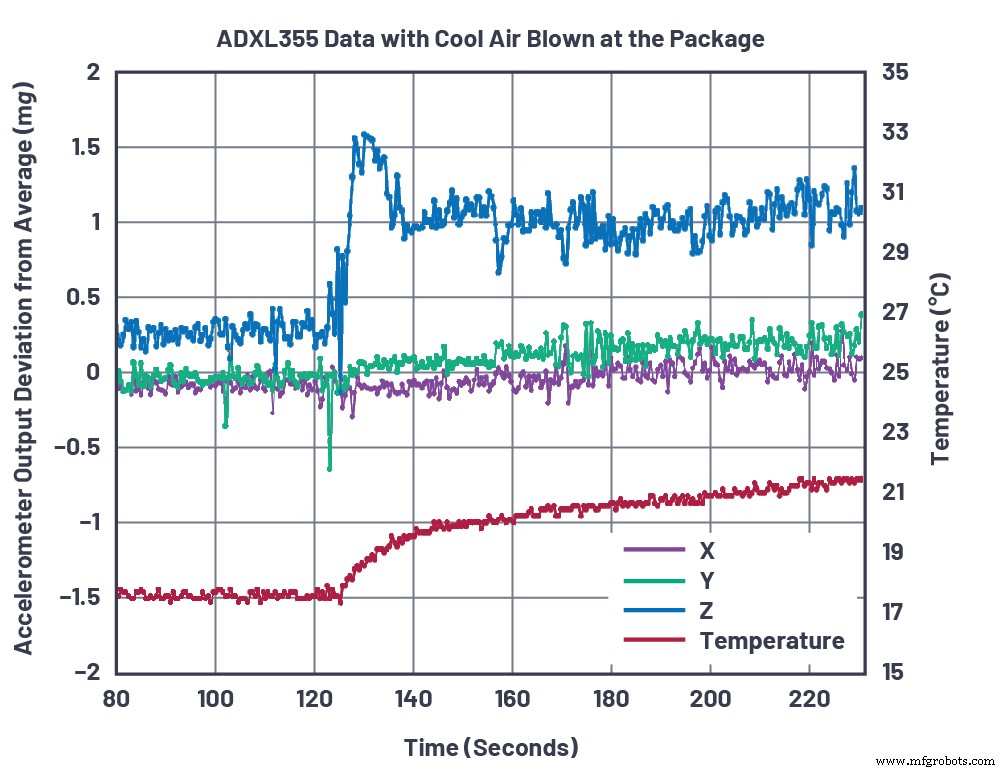
Figura 5. Dados de choque térmico ADXL355 usando uma pistola de ar quente na configuração fria. (Fonte:Dispositivos analógicos)
Como pode ser visto na Figura 5, o canhão de ar estava soprando ar um pouco mais quente na embalagem de cerâmica, que é hermeticamente fechada ao meio ambiente. Isso resulta em aproximadamente 1500 μ g deslocamento no eixo z, uma quantidade muito menor de deslocamento no eixo y (talvez ~ 100 µ g ) e praticamente nenhuma mudança no eixo x. Embora muitos produtos do cliente final tenham algum gabinete no topo da placa de circuito impresso que distribui tensões térmicas diferenciais, é importante considerar esses tipos de tensões transitórias rápidas, que podem se manifestar em um erro de deslocamento, conforme visto neste teste simples.
A Figura 6 mostra o efeito de polaridade oposta quando a pistola de ar quente é desligada.
clique para ver a imagem em tamanho real
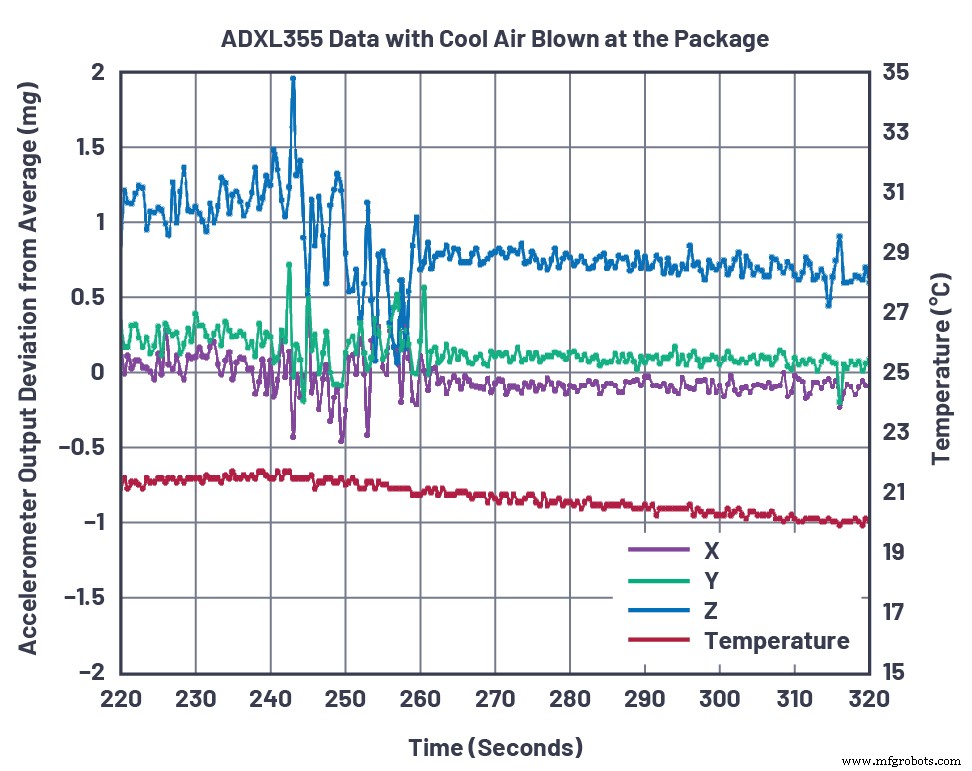
Figura 6. Choque térmico ADXL355 com canhão a ar desligando em t =240 segundos. (Fonte:Dispositivos analógicos)
Este efeito é ainda mais pronunciado quando o canhão de ar é usado no ambiente aquecido; isto é, quando o choque de temperatura é maior em magnitude. A saída do canhão de ar Weller é da ordem de ~ 400 ° C, por isso é importante aplicá-la a uma distância para evitar danos por superaquecimento ou choque térmico. Neste teste, o ar quente foi soprado a aproximadamente 15 cm do ADXL355, o que resultou em um choque de temperatura quase instantâneo de ~ 40 ° C, conforme mostrado na Figura 7.
clique para ver a imagem em tamanho real
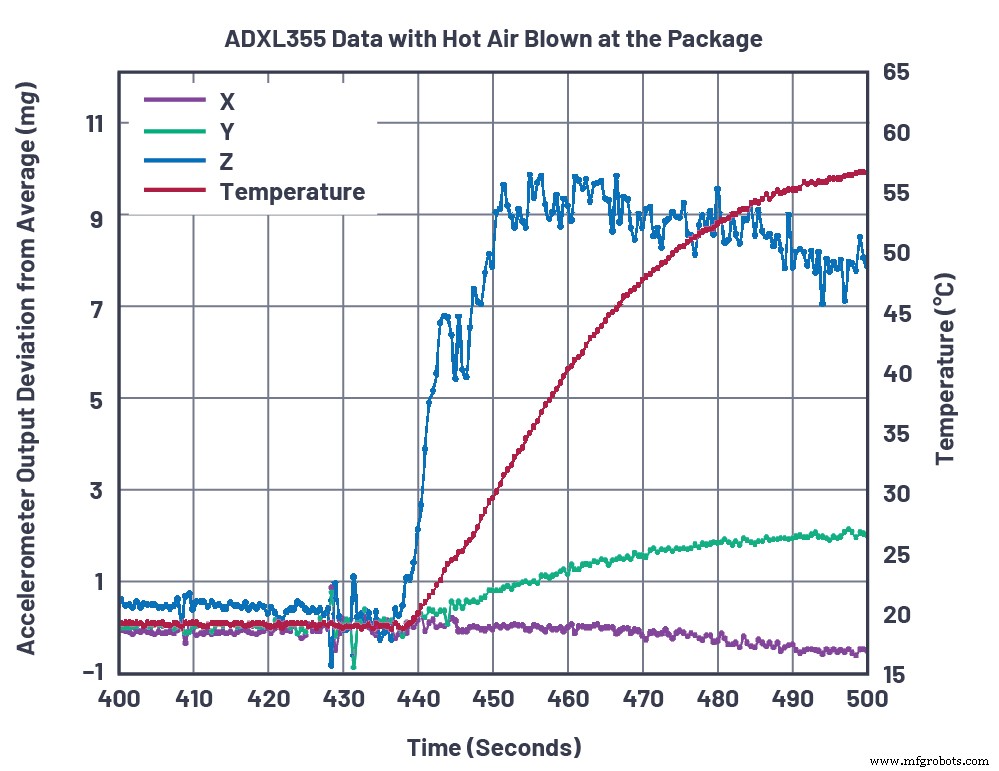
Figura 7. Choque térmico ADXL355 com pistola de ar quente. (Fonte:Dispositivos analógicos)
Mesmo que a quantidade de choque térmico seja bastante forte, ainda é impressionante ver o quão mais rápido o eixo z responde neste experimento do que os eixos xey. Usando o coeficiente de temperatura de deslocamento da planilha de dados, e com uma mudança de 40 ° C na temperatura, seria de se esperar observar cerca de 100 µ g / ° C × 40 ° C =4 m g shift, que os eixos xey eventualmente começam a mostrar. No entanto, notando um quase instantâneo de 10 m g a mudança no eixo z mostra que este é um efeito diferente que está sendo tratado, em vez da mudança de deslocamento devido à temperatura. Isso é resultado da tensão / deformação térmica diferencial no sensor e é mais obviamente visto no eixo z devido a esse sensor ser mais sensível a tensões diferenciais do que xey, conforme descrito anteriormente neste artigo.
O coeficiente de temperatura típico do deslocamento do ADXL355 (temperatura de deslocamento) é especificado em ± 100 µ g / ° C na folha de dados. É importante entender a metodologia de teste usada aqui, pois o deslocamento de temperatura é medido com os acelerômetros em um forno. O forno é lentamente acelerado através da faixa de temperatura do sensor e as inclinações das compensações são medidas. Um exemplo típico é mostrado na Figura 8.
clique para ver a imagem em tamanho real
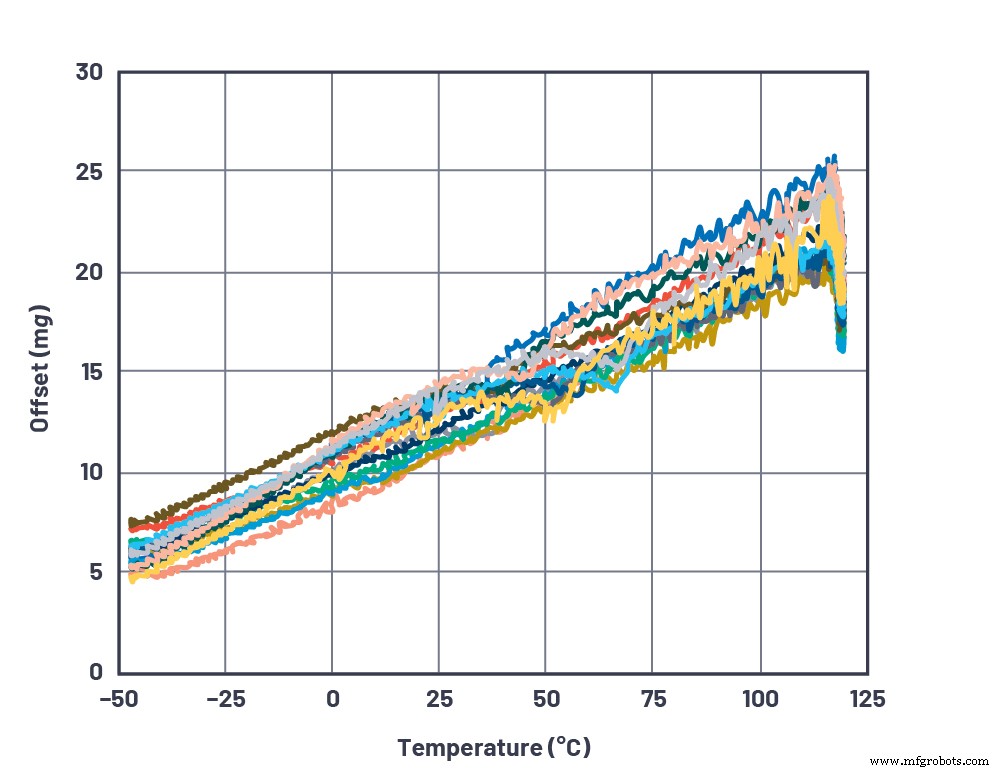
Figura 8. Caracterização da temperatura baseada no forno do ADXL355. (Fonte:Dispositivos analógicos)
Existem dois efeitos em jogo neste enredo. Um deles é o offset tempco, conforme caracterizado e documentado na folha de dados. Isso pode ser interpretado como o valor médio de muitas partes de –45 ° C a + 120 ° C conforme o forno aumenta a temperatura em 5 ° C / min, mas sem nenhum tempo de absorção. Isso seria derivado de gráficos semelhantes à Figura 9 e indicaria cerca de 18 m g acima de 165 ° C, ou cerca de 109 µ g / ° C, que fica ligeiramente fora do valor típico de 100 µ g / ° C, mas dentro do intervalo mínimo e máximo conforme especificado na folha de dados. No entanto, considere o lado direito da Figura 9, pois os dispositivos continuam a embeber a 120 ° C por cerca de 15 minutos. Conforme os dispositivos ficam em uma temperatura quente, a quantidade real de deslocamento de deslocamento diminui e melhora. Neste caso, o valor médio é próximo a 10 m g acima de 165 ° C ou cerca de 60 µ g / ° C offset temp. O segundo efeito em jogo é o estresse térmico diferencial conforme a massa à prova de sensor se estabiliza em temperatura em todo o dispositivo de silício e o estresse é então reduzido. Este é o efeito que é visto no teste do canhão de ar mostrado na Figura 6 até a Figura 8 e é importante entender que esse efeito opera em uma escala de tempo mais rápida do que os tempcos de deslocamento de longo prazo listados na planilha de dados. Isso pode ser valioso para muitos sistemas, que, devido à sua dinâmica térmica geral, provavelmente terão uma rampa muito mais lenta do que 5 ° C / min.
Na parte três desta série, exploraremos outros fatos que afetam a estabilidade e, em seguida, ofereceremos recomendações de projeto de sistema mecânico para melhorar o desempenho geral de um acelerômetro MEMS de 3 eixos de alta precisão.
Referências
1
Chris Murphy. “Escolhendo o acelerômetro MEMs mais adequado para sua aplicação - Parte 1.” Analog Dialogue, vol. 51, No. 4, outubro de 2017.
2
Chris Murphy. “Medição de inclinação do acelerômetro acima da temperatura e na presença de vibração”. Diálogo analógico, agosto de 2017.
3
Sistema de avaliação SDP-K1. Analog Devices, Inc.
4
Mbed:Guia do usuário para SDP-K1. Analog Devices, Inc.
5
Suporte de braço articulado PanaVise. PanaVise.
6
Código Mbed. Analog Devices, Inc.
7
Pistola de ar de aquecimento / resfriamento Weller 6966C. Weller.
8
Parileno. Wikipedia.
Integrado
- Construa sua infraestrutura de nuvem para desempenho e eficiência
- VersaLogic lança computador integrado de alto desempenho baseado em Xeon
- Coleta de dados IoT alimenta agricultura de precisão
- MÓDULO DE DADOS:monitores de grande porte com alto brilho e função easyTouch
- Seis inovações impulsionando melhorias no desempenho do hardware criptográfico
- TECHWAY:Plataforma Kintex-7 FPGA PCIe para impulsionar o desempenho da taxa de dados com 12 links HSS
- Abaco:o XMC robusto oferece 2,3 TeraFLOPS de desempenho máximo e suporte para CUDA e OpenCL
- Unidade de negócios de materiais de alto desempenho da Lanxess será legalmente independente
- Monitoramento de desempenho:desafios, soluções e benefícios
- Centros CNC de alta precisão para serviços pesados