


O projeto de referência simplifica o controle do motor robótico industrial
Trinamic, agora parte da Maxim Integrated, demonstrou uma gama de soluções de controle de energia na vanguarda da APEC, incluindo suas soluções mais recentes que simplificam o desenvolvimento de ferramentas de fim de braço (EoAT) para robótica industrial e o servo controlador de eixo único / driver com controle de movimento integrado. Em entrevista à Power Electronics, Jeff DeAngelis, vice-presidente de comunicações industriais da Maxim Integrated, bem como Jonas Proeger, diretor de gestão de negócios, e Stephan Kubisch, diretor de definição de produtos, ambos da Trinamic, destacaram essas soluções mais recentes que aceleram o tempo de desenvolvimento em várias aplicações de automação industrial.
O design de referência de código aberto TMCM-1617-GRIP-REF integra um controlador orientado a campo de hardware (FOC) e três portas de comunicação. Inclui o MAX22000 IC de nível industrial da Maxim Integrated, transceptor MAX22515 IO-Link, uma E / S analógica de alta precisão configurável por software e o MAX14906, uma E / S digital de quatro canais usada para configurar o modo de operação do eixo servo drive.
O novo módulo servo controlador / driver TMCM-1321 tem como objetivo otimizar o desempenho de motores de passo bipolares bipolares otimizando a velocidade e a sincronização do eixo e reduzindo as perdas de energia. A Maxim Integrated destacou que o dispositivo integra um codificador magnético e entradas digitais para codificadores ópticos para simplificar o controle do servo com feedback e diagnósticos avançados.
Plataforma de código aberto
“O benefício do design de referência TMCM-1617-GRIP-REF é sua capacidade de integrar vários circuitos em uma placa que normalmente seria distribuída por várias placas ou componentes na extremidade de um braço robótico. Esta pegada compacta combina uma interface de barramento de comunicação simplificada que reduz a carga do chicote de fios e fornece uma maneira simplificada de mover dados e energia por um único ou duplo par de fios, bem como a capacidade de comissionar a ferramenta corretamente. Este tamanho compacto e comunicação simplificada e interface de barramento de configuração são acoplados ao nosso ambiente de desenvolvimento de software TMCL-IDE, tornando-o um design de referência muito versátil para ferramentas de fim de braço ”, disse DeAngelis. Ele acrescentou, “além de seu tamanho compacto, outro fator importante alcançado são os muito leves 24 gramas de peso para este módulo”.
Como Proeger descreveu, o diagrama de blocos da figura 1 mostra uma célula de carga para detectar a força que vem do braço ou da garra, ou sensor de proximidade. TMCM-1617-GRIP-REF suporta os protocolos de comunicação industrial EtherCAT, IO-Link e RS-485, e fornece um sinal analógico e entradas / saídas digitais programáveis por software e pode ser configurado usando o Trinamic Motion Control Language Integrated Development Environment (TMCL- IDE). “Oferecemos a opção de comunicação RS-485 com 100 megabits por segundo, que ainda é popular. A vantagem é que ainda é um cabeamento tradicional de alta velocidade para atender às demandas desta aplicação. É um produto muito flexível do ponto de vista da comunicação como uma abordagem mais tradicional para controlar o motor ”, disse Proeger.
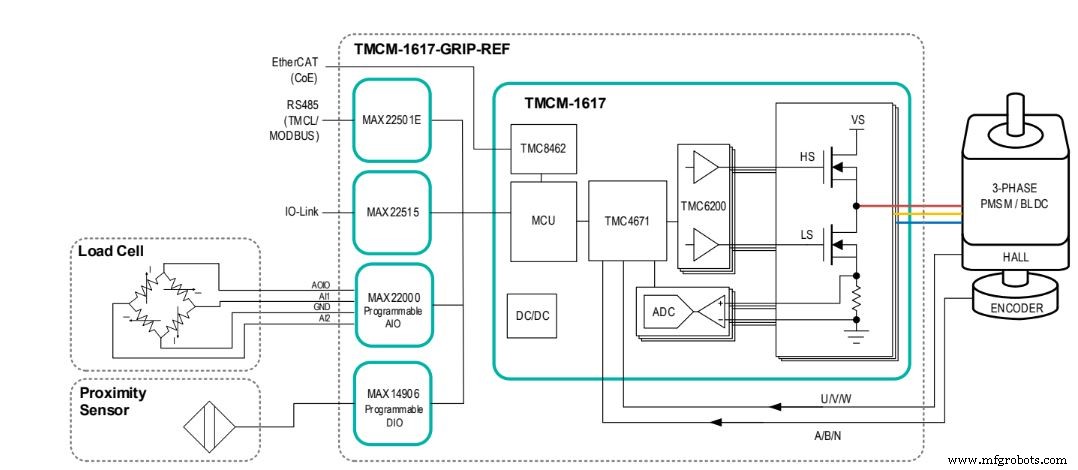
Figura 1:Diagrama de blocos de TMCM-1617-GRIP-REF (Fonte:Maxim Integrated)
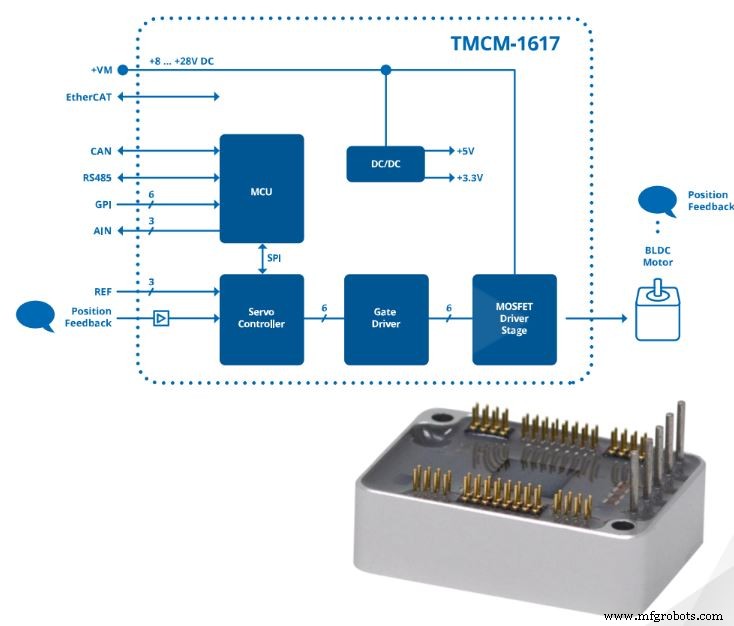
Figura 2:TMCM-1617 - Menor Servo Controlador (Fonte:Maxim Integrated)
“Fornecemos todos os trilhos de alimentação necessários para suportar periféricos e sensores externos sem a necessidade de uma fonte de alimentação adicional”, disse Kubisch. Ele acrescentou, “o controle de corrente perfeito tem o maior impacto na eficiência geral do sistema”.
Com arquiteturas de barramento de última geração, combinadas com controle e diagnóstico integrados em uma única solução, a Maxim Integrated acredita que o design de referência pode aumentar a produtividade no chão de fábrica e levar a inteligência artificial ao limite. Por exemplo, os recursos integrados do MAX22515, como ampla proteção integrada para garantir uma comunicação robusta em ambientes industriais adversos. Todos os pinos de interface de linha IO-Link (V24, C / Q, DI e GND) são protegidos contra tensão reversa, contra curto-circuito, hot-plug e possuem proteção contra surtos de ± 1,2kV / 500Ω integrada.
Para o futuro do motor e do controle de movimento, a crescente complexidade em conexão com a demanda por confiabilidade final levará a mais inteligência do sistema - e isso precisa ser descentralizado. As decisões precisam ser tomadas em tempo real, os dados precisam ser coletados na fonte e compartilhados na nuvem.
Servo controlador / driver TMCM-1321
O TMCM-1321 é um controlador / driver de eixo único para motores de passo bipolares bipolares com um codificador magnético integrado e entradas digitais, todos oferecendo lógica de controle de malha fechada para otimizar o controle do motor.
Maxim Integrated apontou que o fator de forma deve ser significativamente menor do que outras soluções, e a placa oferece suporte a microstep de 256x com operação livre de ruído. O codificador magnético integrado pode ser usado quando um ímã adequado é conectado ao eixo do motor, permitindo a operação em malha fechada. Alternativamente, um codificador óptico pode ser conectado por meio das entradas digitais ABN. Diferentes formatos de rampa podem ser selecionados. Além da rampa linear e da rampa Trinamic SixPoint ™, o módulo TMCM-1321 implementa uma rampa em forma de S que pode acelerar o tempo real de transferência.
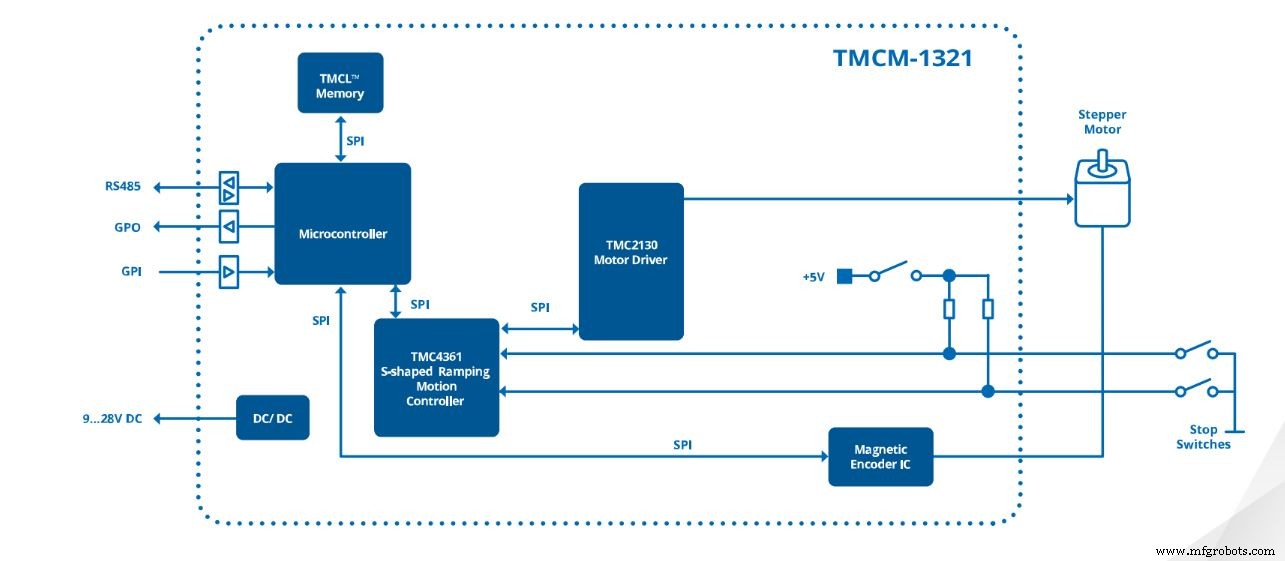
Figura 3:Diagrama de blocos de TMCM-1321 (Fonte:Maxim Integrated)

Figura 4:Placa TMCM-1321 (Fonte:Maxim Integrated)
O TMCM-1321 foi projetado para correntes de bobina de até 0,7 A RMS e tensão de alimentação de 24 Vcc. Três entradas digitais podem ser usadas como chaves finais e entradas de chaves home ou como entradas de uso geral.
O controle de motores e acionamentos são fundamentais em muitas aplicações, pois permitem obter um alto grau de precisão, o que por sua vez se traduz em menores custos e maior eficiência. A função vital desempenhada por um circuito de controle do motor é garantir que o rotor assuma, durante as diferentes condições de operação e carga, uma posição precisa em relação aos enrolamentos, para determinar sua localização com um grau de precisão suficiente.
>> Este artigo foi publicado originalmente em nosso site irmão, Power Notícias de eletrônicos.
Conteúdos Relacionados:
- Projetando controles de motor para sistemas robóticos
- Fazendo robôs com Ada, Parte 2 - Dirigindo os motores
- Resolvendo desafios de projeto de controle de motor multi-eixo determinístico
- O software facilita o design do driver do motor BLDC
- Os kits de desenvolvimento oferecem plataformas para projetos de controle de motor e energia digital
- Projetar um sistema de feedback de reação rápida para projetos motorizados miniaturizados
Para obter mais informações sobre o Embedded, assine o boletim informativo semanal por e-mail da Embedded.
Integrado
- Renesas expande opções de microcontrolador para controle de servo em robôs industriais
- Módulo front-end simplifica o design do WI-Fi 6
- Projetando controles de motor para sistemas robóticos
- O controlador do motor integra o núcleo Arm Cortex-M0
- Drivers integrados facilitam o design do motor de passo
- Benefícios da convergência de controle industrial
- Compreendendo os painéis de controle industrial
- Noções básicas de design do painel de controle
- O que é prototipagem de design industrial?
- Sobre motores industriais e aplicações