


Minimização do ruído e vibração do motor de passo em aplicações de controle de movimento de precisão
Os motores de passo funcionam bem em uma ampla gama de aplicações, mas podem ter problemas com ondulação de torque e problemas de distorção de corrente. Aprenda sobre QuietStep, um algoritmo proprietário da Allegro MicroSystems, como uma solução possível.
Os motores de passo oferecem vantagens exclusivas sobre os motores de corrente contínua (DC) e DC sem escova (BLDC) em muitas aplicações. Um passo bipolar fornece posição de malha aberta precisa, bem como torque de velocidade zero sem usar uma malha de controle ou sensores externos. Com seus recursos de passo controlados, os motores de passo funcionam bem em uma ampla gama de aplicações de controle de movimento de precisão, incluindo TVs de circuito fechado (CCTV), impressoras 3D, controle numérico computadorizado (CNC), equipamento de manufatura têxtil e máquinas pick and place.
A implantação bem-sucedida de motores de passo requer um gerenciamento eficaz de ruído e vibração. Em aplicações de CFTV, por exemplo, a vibração se traduz diretamente no sensor de imagem e no cardan. O grande zoom combinado com o movimento pode distorcer a imagem. Na impressão 3D, a ressonância do motor ou overshoot causado por ondulação de alto torque pode resultar em muitos artefatos de impressão indesejados. Na maioria dos casos, a redução da vibração do motor resulta em melhor qualidade de imagem ou impressão 3D mais precisa. A redução da vibração do motor também permite uma operação geral mais silenciosa.
Tecnologias avançadas baseadas em algoritmos proprietários estão agora disponíveis para minimizar ruído e vibração em projetos de motores de passo, reduzindo a ondulação de torque e a distorção da corrente. Antes de mergulhar nessas soluções de controle de movimento, é útil entender o que causa a vibração e, por sua vez, o ruído audível. Primeiro, vamos dar uma olhada em como um motor de passo opera.
Fundamentos Stepper
Um motor de passo bipolar é um motor DC com posições discretas de pólos construídas de múltiplas bobinas dispostas em dois grupos chamados fases. A relação de corrente entre as duas fases determina como o rotor é posicionado entre os dois enrolamentos. Dessa forma, um motor de passo pode dividir sua posição entre dois pólos em incrementos menores chamados microsteps.
A corrente em cada enrolamento do motor de passo pode ser somada para criar um vetor onde a magnitude do vetor é o torque. Ao examinar a corrente em cada uma das duas fases no espaço polar, podemos visualizar o vetor conforme ele gira em cada ciclo elétrico.
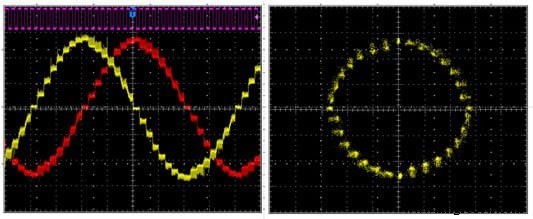
Figura 1. Corrente de fase em cada um dos dois enrolamentos de um motor de passo bipolar em 1/8 (à esquerda). Corrente de fase em cada um dos dois enrolamentos de um passo bipolar na etapa 1/8, mas representada no domínio polar (direita).
No domínio baseado no tempo (Figura 1 à esquerda), o torque é definido como a soma da área sob as duas curvas. No domínio polar (Figura 1 à direita), a magnitude do vetor é o torque. Nessas imagens, podemos ver que o torque é constante conforme o campo se move em cada ciclo elétrico. Quando o torque não é constante, o sistema experimenta vibração e ruído audível.
Assumindo que o motor não está operando em ressonância, a ondulação de torque se torna a maior fonte de ruído audível e vibração em um motor de passo.
Controle de um motor de passo (controle de corrente)
O controle de corrente de modulação por largura de pulso (PWM) é a maneira mais comum de acionar um stepper. Ao implementar o controle de corrente, o controlador PWM corta a saída, limitando a corrente em cada enrolamento para manter uma proporção que define a posição do rotor.
A natureza do controle de corrente PWM resulta em ondulação de corrente com base no ciclo de trabalho aplicado, a indutância do motor e a tensão através dele. Para minimizar a ondulação, o controlador pode gerenciar como a corrente diminui nos enrolamentos implementando vários modos de decaimento.
Vamos revisar os modos de decaimento comuns para um único ciclo de PWM começando com o aumento da corrente do inversor.
Seguindo o inversor, mostrado na figura 2A, o modo de decaimento é implementado durante o tempo de inatividade PWM por meio de dois métodos síncronos mostrados na figura 2B e 2C.
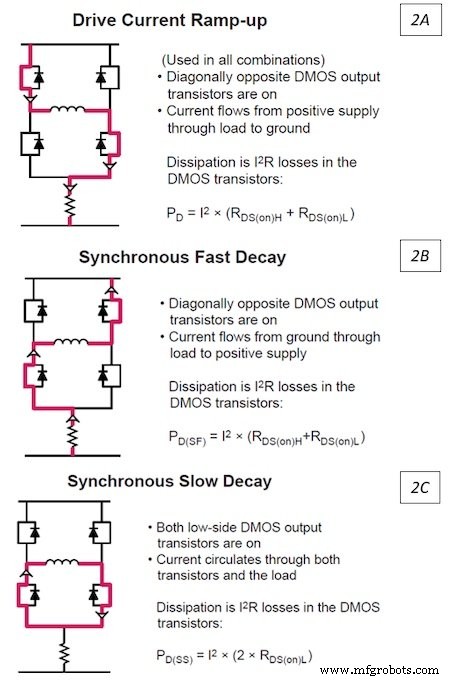
Figura 2. Caminho atual em ponte completa mostrando os modos de drive e decaimento.
O decaimento rápido fornece controle de corrente ideal, mas resulta em alta ondulação. A decadência lenta resulta em baixa ondulação, mas a taxa de decadência está sujeita à força eletromotriz traseira do motor (BEMF), que em alguns casos pode criar distorções na corrente.
A Figura 3A mostra o que pode acontecer ao usar um decaimento 100 por cento lento. Quando a corrente do enrolamento está caindo, a decadência lenta não pode diminuir a corrente rápido o suficiente, causando distorção na borda de queda. A Figura 3B mostra os efeitos do uso de decaimento rápido de 100 por cento. A ondulação da corrente é muito maior, mas o controlador mantém o controle preciso da corrente.
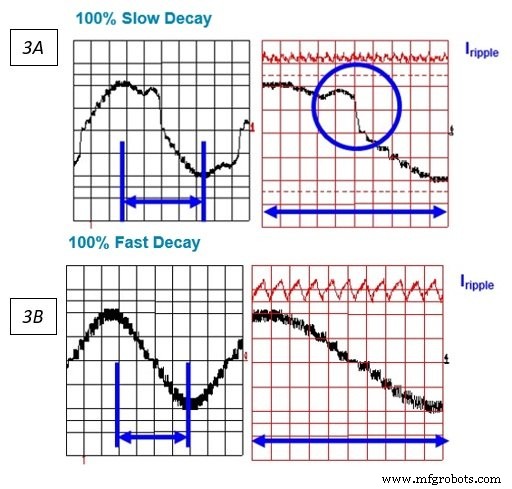
Figura 3A. A decadência lenta pode produzir distorção quando a corrente na carga está diminuindo.
Figura 3B. O decaimento rápido causa uma grande ondulação de corrente, o que pode resultar em vibração e ruído audível.
Podemos evitar os efeitos mostrados na Figura 1 e também manter uma corrente de ondulação razoável alcançando um meio-termo. Quando a corrente está diminuindo na carga, o driver implementa uma combinação de decaimento rápido e lento, conhecido como decaimento misto. O tempo desligado é dividido em uma parte de decaimento rápido e uma parte de decaimento lento, conforme mostrado na Figura 4. Quando a corrente na carga está aumentando, o decaimento lento minimiza a ondulação.
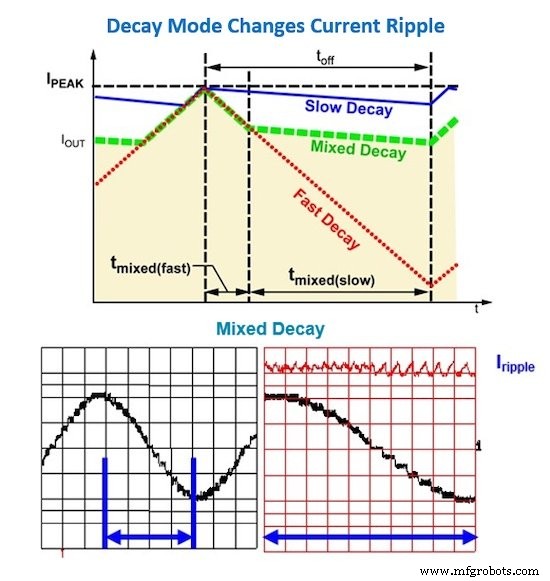
Figura 4. A degradação mista minimiza a ondulação, ao mesmo tempo que mantém o controle da corrente no enrolamento.
Dependendo das características de um motor de passo e de sua constante de tempo LR, o decaimento lento na borda ascendente pode criar problemas em correntes baixas, onde a taxa de mudança na corrente é muito rápida para o controlador PWM regular para correntes baixas devido ao apagamento do amplificador de detecção de corrente. Este cenário pode resultar em distorção de corrente quando a corrente na carga está aumentando, conforme mostrado na Figura 5.
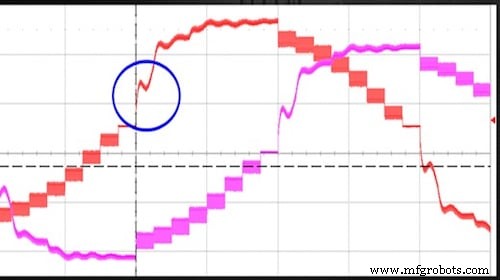
Figura 5. O decaimento lento na borda ascendente pode causar distorção em motores com certas características LR.
É difícil alcançar um compromisso fácil que funcione para todos os motores de passo bipolares. Para resolver esses problemas enquanto mantém a ondulação mais baixa possível, o sistema deve se adaptar às diferentes características do motor.
Uma nova abordagem para reduzir a ondulação de torque
A Allegro introduziu uma maneira de reduzir a ondulação do torque e a distorção da corrente para aplicações de motor de passo. Chamada de QuietStep, esta inovação agora está disponível como uma opção no driver de motor de passo A5984 da Allegro.
A tecnologia QuietStep usa um algoritmo proprietário que ajusta dinamicamente (para cima ou para baixo) a porcentagem de redução rápida necessária ciclo a ciclo para obter o melhor desempenho possível em todas as condições operacionais, sem usar software complexo.
O algoritmo reverte a abordagem tradicional para decaimento misto implementando primeiro decaimento lento, seguido pelo decaimento rápido. A Figura 6A mostra o decaimento misto tradicional com a porção fixa de decaimento rápido e lento e com o decaimento rápido iniciando o ciclo fora do tempo de PWM. A Figura 6B mostra como a decadência lenta começa ao usar QuietStep no início do ciclo de tempo desativado de PWM. O QuietStep ajusta automaticamente a proporção de decaimento rápido e lento para minimizar a ondulação da corrente enquanto mantém a regulação precisa da corrente.
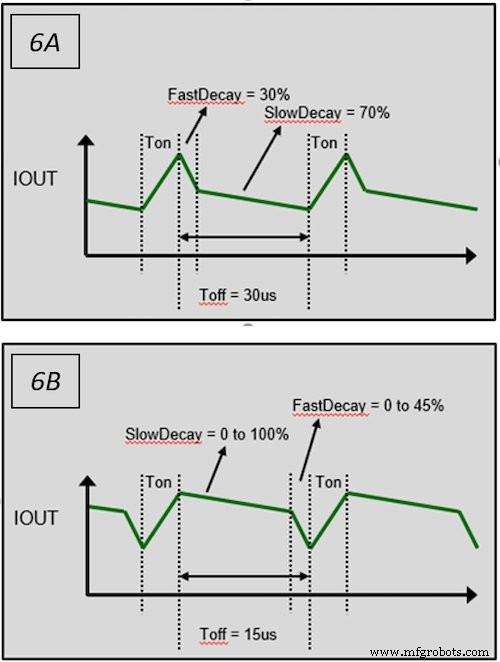
Figura 6A. Decadência mista tradicional em que a proporção de decadência rápida e lenta é fixa.
Figura 6B. O QuietStep pode ajustar dinamicamente a proporção de decaimento rápido e lento para manter o controle da corrente e minimizar a ondulação da corrente.
O decaimento rápido é introduzido apenas quando necessário para a regulação da corrente, resultando na menor ondulação de corrente possível. A Figura 7 mostra a alta ondulação da corrente resultante do decaimento misto fixo com a diminuição da corrente e da perda de controle da corrente com o decaimento lento com o aumento da corrente. A tecnologia QuietStep elimina esses efeitos cortando a corrente ondulada pela metade em comparação com o decaimento misto. Quando a corrente está aumentando, o QuietStep mantém a regulação da corrente até zero amperes.
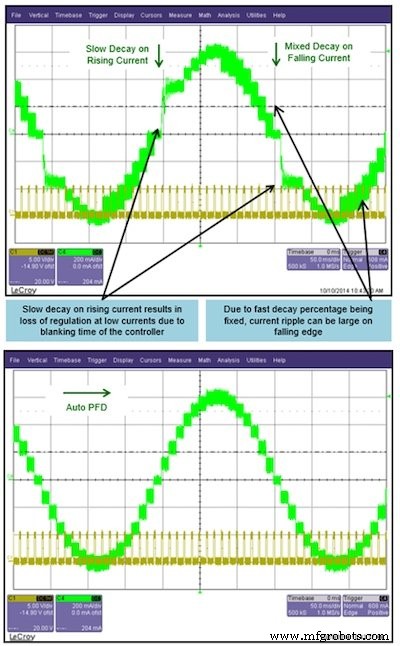
Figura 7. O decaimento lento tradicional com o aumento da corrente e o decaimento misto para diminuir a corrente resulta em perda de regulação ao aumentar com o aumento da corrente e grande ondulação com a diminuição da corrente. QuietStep fornece excelente regulação de corrente com aumento de corrente, mantendo baixa ondulação de corrente ao longo de todo o ciclo elétrico.
A redução da ondulação e ressonância da corrente no nível do sistema minimiza a vibração, bem como o ruído audível causado pela vibração. O resultado é melhor imagem de vídeo em sistemas CCTV e qualidade de impressão superior em impressoras 3D.
A redução do ruído audível e da vibração aprimora quase todas as aplicações de controle de motores, desde fechaduras de portas de automação residencial e controle de válvulas até sistemas de visão de precisão e impressão 3D. A tecnologia QuietStep da Allegro elimina o incômodo de tentar determinar a fonte de ruído e vibração em um sistema. Totalmente integrado ao IC, o QuietStep é fácil de implementar, não requer programação ou componentes externos e é totalmente automático.
Implantando QuietStep com drivers de motor de passo bipolar
Com drivers de motor de passo que permitem esta tecnologia avançada, como o Allegro A5984, as formas de onda atuais são otimizadas automaticamente em uma ampla gama de velocidades e características do motor de passo. As soluções de driver de motor de passo, equipadas com a tecnologia QuietStep, ajustam a quantidade de decadência rápida durante um ciclo de PWM para minimizar a ondulação da corrente em várias condições operacionais.
O recurso QuietStep melhora o desempenho do sistema, resultando em redução do ruído audível do motor, vibração mais baixa e maior precisão do passo. Utilizando esta tecnologia, o driver A5984 é projetado para operar motores de passo bipolares de passo completo até modos de passo 1/32 e permite uma capacidade de saída de até 40 V e ± 2 A. No geral, o algoritmo QuietStep permite um sistema mais fácil desenho, implementação e operação.
Para saber mais sobre o driver A5984 e a tecnologia QuietStep, visite a página do produto A5984.
A Allegro MicroSystems é líder global em soluções de energia e detecção para controle de movimento e sistemas de eficiência energética. Para obter mais informações, visite o site da Allegro MicroSystems.
Artigos do setor são uma forma de conteúdo que permite aos parceiros do setor compartilhar notícias, mensagens e tecnologia úteis com os leitores do All About Circuits de uma forma que o conteúdo editorial não é adequado. Todos os artigos da indústria estão sujeitos a diretrizes editoriais rígidas com a intenção de oferecer aos leitores notícias úteis, conhecimentos técnicos ou histórias. Os pontos de vista e opiniões expressos nos Artigos da Indústria são do parceiro e não necessariamente da All About Circuits ou de seus redatores.
Reimaginando sistemas ERP em manufatura moderna para crescimento futuro
Algoritmo de otimização de variável ortogonal eficiente para sistemas de comunicação
Robô industrial
- Circuitos permissivos e de bloqueio
- Motores de passo
- Renesas expande a linha de MCU RX24T e RX24U para aplicações de controle de motor
- Nanotec:controlador de motor compacto para motores CC sem escovas e motores de passo
- Aplicações e limitações de algoritmos genéticos
- Como a soldagem TIG robótica adiciona precisão e controle de qualidade à sua produção
- IQ Motion Control lança nova linha de servomotores
- A área cinzenta entre servomotores e motores de passo
- O controle de movimento integrado à segurança permite que a segurança e a produtividade coexistam
- Conexões para Controle:Interfaces de Comunicação para Sensores de Posição e Movimento