


Motores de passo
Motor de passo vs servo motor
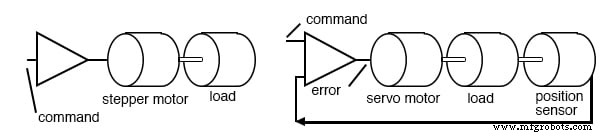
Um motor de passo é uma versão “digital” do motor elétrico. O rotor se move em etapas discretas conforme comandado, em vez de girar continuamente como um motor convencional. Quando parado, mas energizado, um stepper (abreviação de motor de passo) mantém sua carga estável com um torque de retenção .
A ampla aceitação do motor de passo nas últimas duas décadas foi impulsionada pelo surgimento da eletrônica digital. A eletrônica de driver de estado sólido moderna foi a chave para seu sucesso. E os microprocessadores se conectam prontamente aos circuitos do driver de motor de passo.
Em termos de aplicação, o predecessor do motor de passo foi o servo motor. Hoje, essa é uma solução de custo mais alto para aplicações de controle de movimento de alto desempenho. O custo e a complexidade de um servomotor são devidos aos componentes adicionais do sistema:sensor de posição e amplificador de erro). Ainda é a maneira de posicionar cargas pesadas além do alcance de escalonadores de baixa potência.
Alta aceleração ou alta precisão incomum ainda requerem um servo motor. Caso contrário, o padrão é o escalonador devido à eletrônica de unidade simples, boa precisão, bom torque, velocidade moderada e baixo custo.
Motor de passo vs servo motor
Um motor de passo posiciona as cabeças de leitura e gravação em uma unidade de disquete. Eles já foram usados para o mesmo propósito em discos rígidos. No entanto, a alta velocidade e precisão exigidas do posicionamento da cabeça do disco rígido moderno requer o uso de um servomotor linear (bobina de voz).
O servo amplificador é um amplificador linear com alguns componentes discretos de difícil integração. Um esforço considerável de projeto é necessário para otimizar o ganho do servo amplificador em relação à resposta de fase aos componentes mecânicos. Os drivers do motor de passo são chaves de estado sólido menos complexas, sendo “on” ou “off”. Assim, um controlador de motor de passo é menos complexo e caro do que um controlador de servo motor.
Slo-syn motores síncronos podem funcionar com tensão de linha CA como um motor de indução de capacitor permanente monofásico. O capacitor gera um 90 ° segunda fase. Com a tensão de linha direta, temos um inversor de duas fases.
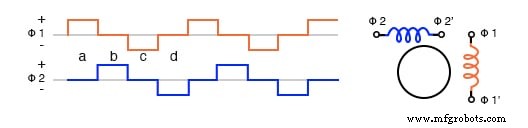
Formas de onda de impulso de bipolar (±) ondas quadradas de 2-24 V são mais comuns atualmente. Os campos magnéticos bipolares também podem ser gerados a partir de unipolar (uma polaridade) tensões aplicadas a extremidades alternadas de um enrolamento com derivação central (figura abaixo).
Em outras palavras, a CC pode ser comutada para o motor para que ele veja CA. À medida que os enrolamentos são energizados em sequência, o rotor se sincroniza com o campo magnético do estator conseqüente. Portanto, tratamos os motores de passo como uma classe de motores síncronos CA.
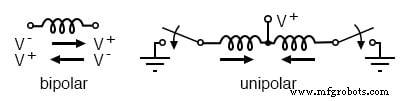
Uma unidade unipolar de uma bobina com derivação central em (b), emula corrente CA em bobina única em (a)
Características
Os motores de passo são robustos e baratos porque o rotor não contém anéis coletores de enrolamento ou comutador. O rotor é um sólido cilíndrico, que também pode ter pólos salientes ou dentes finos. Na maioria das vezes, o rotor é um ímã permanente.
Você pode determinar que o rotor é um ímã permanente pela rotação da mão sem energia, mostrando torque de detenção , pulsações de torque. As bobinas do motor de passo são enroladas dentro de um estator laminado, exceto para pode empilhar construção. Pode haver apenas duas fases de enrolamento ou até cinco.
Essas fases são freqüentemente divididas em pares. Assim, um motor de passo de 4 pólos pode ter duas fases compostas de pares de pólos em linha espaçados 90 ° separado. Também pode haver vários pares de pólos por fase. Por exemplo, um stepper de 12 pólos tem 6 pares de pólos, três pares por fase.
Como os motores de passo não giram necessariamente de forma contínua, não há classificação de potência. Se eles girarem continuamente, eles nem mesmo se aproximam de uma capacidade nominal de potência subfracionária. Eles são realmente pequenos dispositivos de baixa potência em comparação com outros motores.
Eles têm classificações de torque de mil in-oz (polegadas-onças) ou dez N-m (newton-metros) para uma unidade de 4 kg. Um pequeno stepper do tamanho de uma “moeda de dez centavos” tem um torque de um centésimo de newton-metro ou algumas polegadas-onças. A maioria dos steppers tem alguns centímetros de diâmetro com uma fração de um torque n-m ou alguns in-oz.
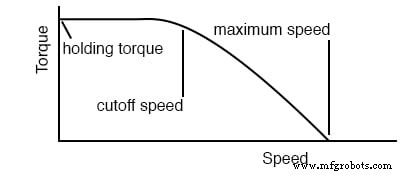
O torque disponível é uma função da velocidade do motor, inércia da carga, torque da carga e componentes eletrônicos da unidade, conforme ilustrado na curva de velocidade vs torque abaixo. Um motor de passo de retenção energizado tem um torque de retenção relativamente alto Avaliação. Há menos torque disponível para um motor em funcionamento, diminuindo para zero em alguma alta velocidade.
Frequentemente, essa velocidade não é atingível devido à ressonância mecânica da combinação de carga do motor.
Características de velocidade do passo
Os motores de passo movem-se um passo de cada vez, o ângulo do passo quando as formas de onda do drive são alteradas. O ângulo do degrau está relacionado aos detalhes da construção do motor:número de bobinas, número de pólos, número de dentes. Pode ser de 90 ° a 0,75 ° , correspondendo a 4 a 500 passos por revolução.
A eletrônica de acionamento pode reduzir pela metade o ângulo do passo movendo o rotor em meios-passos .
Os steppers não podem atingir as velocidades na curva de torque-velocidade instantaneamente. A frequência máxima de início é a taxa mais alta em que um stepper parado e descarregado pode ser iniciado. Qualquer carga tornará este parâmetro inatingível.
Na prática, a taxa de escalonamento é aumentada durante a partida bem abaixo da frequência máxima de partida. Ao parar um motor de passo, a taxa de passo pode ser diminuída antes de parar.
O torque máximo no qual um stepper pode iniciar e parar é o torque de tração . Esta carga de torque no passo é devido às cargas de fricção (freio) e inercial (volante) no eixo do motor. Assim que o motor estiver em velocidade, torque de extração é o torque máximo sustentável sem perder etapas.
Existem três tipos de motores de passo em ordem crescente de complexidade:relutância variável, ímã permanente e híbrido. O escalonador de relutância variável possui um rotor sólido de aço macio com pólos salientes. O escalonador de ímã permanente tem um rotor de ímã permanente cilíndrico.
O passo de passo híbrido tem dentes de aço macio adicionados ao rotor de ímã permanente para um ângulo de passo menor.
Stepper de relutância variável
Um motor de passo de relutância variável depende do fluxo magnético que busca o caminho de menor relutância através de um circuito magnético. Isso significa que um rotor magnético macio de formato irregular se moverá para completar um circuito magnético, minimizando o comprimento de qualquer entreferro de alta relutância.
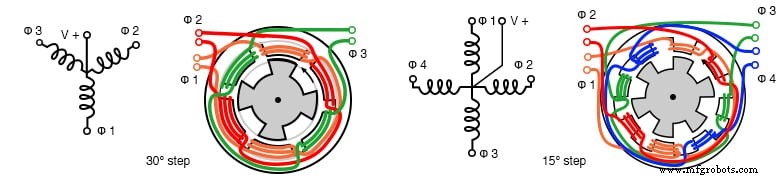
O estator normalmente tem três enrolamentos distribuídos entre pares de pólos, o rotor quatro pólos salientes, produzindo um 30 ° ângulo do passo. Um stepper desenergizado sem torque de detenção quando girado à mão é identificável como um stepper do tipo relutância variável.
Motores de passo de relutância variável trifásicos e quatro fases
As formas de onda do drive para o 3-φ stepper podem ser vistas na seção “Motor de relutância”. O drive para um 4-φ stepper é mostrado na Figura abaixo. A comutação sequencial das fases do estator produz um campo magnético giratório que o rotor segue.
No entanto, devido ao menor número de pólos do rotor, o rotor se move menos do que o ângulo do estator para cada etapa. Para um motor de passo de relutância variável, o ângulo de passo é dado por:
ΘS =360o / NS ΘR =360o / NR ΘST =ΘR - ΘS onde:ΘS =ângulo do estator, ΘR =ângulo do rotor, ΘST =ângulo do passo NS =número de pólos do estator, NP =número de pólos do rotor
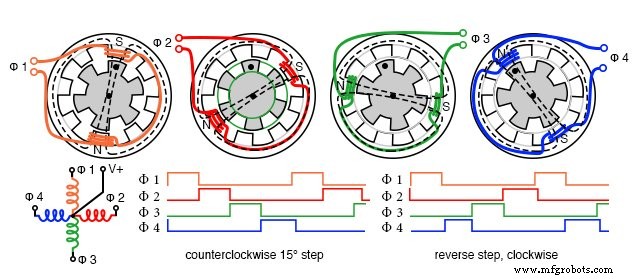
Sequência de passo para passo de relutância variável
Na figura acima, movendo-se de φ1 para φ2, etc., o campo magnético do estator gira no sentido horário. O rotor se move no sentido anti-horário (CCW). Observe o que não acontece! O dente pontilhado do rotor não se move para o próximo dente do estator. Em vez disso, o campo do estator φ2 atrai um dente diferente ao mover o rotor no sentido anti-horário, que é um ângulo menor (15 ° ) do que o ângulo do estator de 30 ° .
O ângulo do dente do rotor de 45 ° entra no cálculo pela equação acima. O rotor moveu no sentido anti-horário para o próximo dente do rotor em 45 ° , mas se alinha com um CW em 30 ° dente do estator. Assim, o ângulo de passo real é a diferença entre um ângulo do estator de 45 ° e um ângulo do rotor de 30 °.
Até que ponto o passo giraria se o rotor e o estator tivessem o mesmo número de dentes? Zero - sem notação.
Começando em repouso com a fase φ1 energizada, três pulsos são necessários (φ2, φ3, φ4) para alinhar o dente do rotor "pontilhado" ao próximo dente do estator CCW, que é 45 ° . Com 3 pulsos por dente do estator e 8 dentes do estator, 24 pulsos ou etapas movem o rotor 360 ° .
Ao inverter a sequência de pulsos, a direção de rotação é invertida acima à direita. A direção, a taxa de passo e uma série de etapas são controladas por um controlador de motor de passo que alimenta um driver ou amplificador. Isso pode ser combinado em uma única placa de circuito.
O controlador pode ser um microprocessador ou um circuito integrado especializado. O driver não é um amplificador linear, mas um simples interruptor liga-desliga capaz de fornecer corrente alta o suficiente para energizar o stepper. Em princípio, o driver pode ser um relé ou mesmo uma chave seletora para cada fase. Na prática, o driver são interruptores de transistor discretos ou um circuito integrado.
Tanto o driver quanto o controlador podem ser combinados em um único circuito integrado que aceita um comando direto e um pulso de passo. Ele fornece corrente para as fases adequadas em sequência.
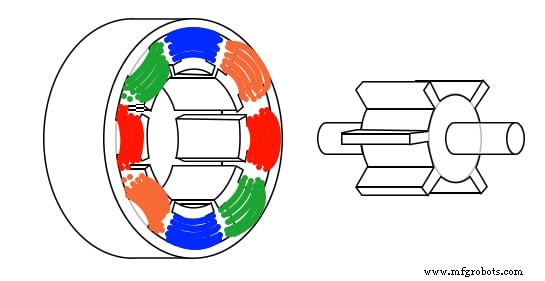
Motor de passo de relutância variável
Você pode desmontar um escalonador de relutância para visualizar os componentes internos. A construção interna de um motor de passo de relutância variável é mostrada na figura acima. O rotor tem pólos salientes para que possam ser atraídos para o campo do estator rotativo quando ele é comutado. Um motor real é muito mais longo do que nossa ilustração simplificada.
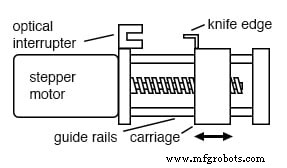
Passo de relutância variável aciona parafuso de avanço
O eixo é freqüentemente equipado com um parafuso de acionamento (figura acima). Isso pode mover as cabeças de uma unidade de disquete sob comando do controlador da unidade de disquete.
Os motores de passo de relutância variável são aplicados quando apenas um nível moderado de torque é necessário e um ângulo de passo grosso é adequado. Uma unidade de parafuso, como usada em uma unidade de disquete, é um desses aplicativos. Quando o controlador é ligado, ele não sabe a posição do carro.
No entanto, ele pode conduzir o carro em direção ao interruptor óptico, calibrando a posição na qual o fio da navalha corta o interruptor como “inicial”. O controlador conta os pulsos de passo a partir desta posição. Contanto que o torque da carga não exceda o torque do motor, o controlador saberá a posição do carro.
Resumo:motor de passo de relutância variável
- O rotor é um cilindro de ferro macio com pólos salientes (salientes).
- Este é o motor de passo mais barato e menos complexo.
- O único tipo de passo sem torque de detenção na rotação manual de um eixo de motor desenergizado.
- Grande ângulo de degrau
- Um parafuso de avanço é frequentemente montado no eixo para movimento de passo linear.
Stepper de ímã permanente
Um motor de passo de ímã permanente tem um rotor de ímã permanente cilíndrico. O estator geralmente tem dois enrolamentos. Os enrolamentos podem ser rosqueados no centro para permitir um unipolar circuito acionador onde a polaridade do campo magnético é alterada pela comutação de uma tensão de uma extremidade para a outra do enrolamento.
Um bipolar o acionamento de polaridade alternada é necessário para alimentar os enrolamentos sem a torneira central. Um passo de passo de ímã permanente puro geralmente tem um grande ângulo de passo. A rotação do eixo de um motor desenergizado exibe torque de detenção. Se o ângulo de retenção for grande, diga 7,5 ° a 90 ° , é provável que seja um stepper de ímã permanente em vez de um stepper híbrido.
Os motores de passo de ímã permanente requerem correntes alternadas em fase aplicadas aos dois (ou mais) enrolamentos. Na prática, quase sempre são ondas quadradas geradas a partir de CC por eletrônicos de estado sólido.
O bipolar impulso é ondas quadradas alternando entre (+) e (-) polaridades, digamos, +2,5 V a -2,5 V. Unipolar drive fornece um fluxo magnético alternado (+) e (-) para as bobinas desenvolvidas a partir de um par de ondas quadradas positivas aplicadas às extremidades opostas de uma bobina com derivação central. O tempo da onda bipolar ou unipolar é a pulsação, passo completo ou meio passo.
Wave Drive
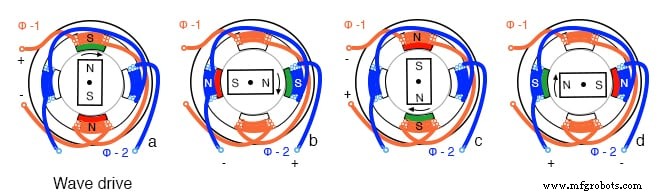
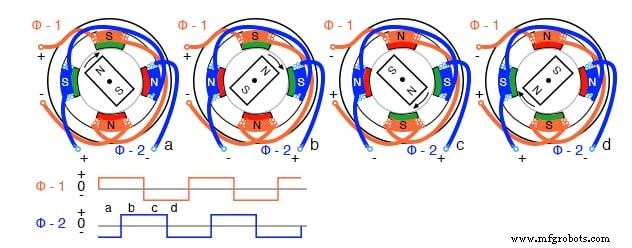
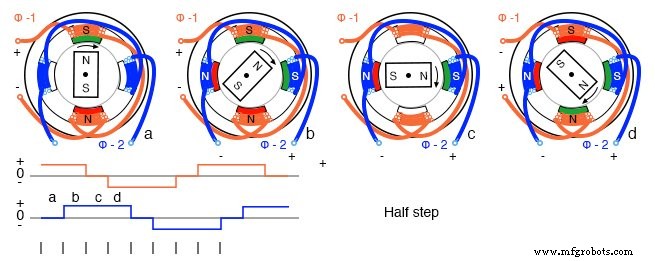
PM sequência da unidade de onda (a) φ1 +, (b) φ2 +, (c) φ1-, (d) φ2-
Conceitualmente, a unidade mais simples é unidade de ondas . A sequência de rotação da esquerda para a direita é positiva φ-1 aponta para o pólo norte do rotor para cima, (+) φ-2 aponta para o rotor para o norte à direita, φ-1 negativo atrai o rotor para o norte para baixo, (-) φ-2 aponta para o rotor para a esquerda. As formas de onda da unidade de onda abaixo mostram que apenas uma bobina é energizada por vez. Embora simples, isso não produz tanto torque quanto outras técnicas de acionamento.
Formas de onda:unidade de onda bipolar
As formas de onda (figura acima) são bipolares porque ambas as polaridades, (+) e (-) conduzem o stepper. O campo magnético da bobina se inverte porque a polaridade da corrente de acionamento se inverte.
Formas de onda:unidade de onda unipolar
As formas de onda (figura acima) são unipolares porque apenas uma polaridade é necessária. Isso simplifica a eletrônica da unidade, mas requer o dobro de drivers. Existem duas vezes mais formas de onda porque um par de ondas (+) é necessário para produzir um campo magnético alternado por aplicação nas extremidades opostas de uma bobina com derivação central.
O motor requer campos magnéticos alternados. Eles podem ser produzidos por ondas unipolares ou bipolares. No entanto, as bobinas do motor devem ter torneiras centrais para o acionamento unipolar.
Os motores de passo de ímã permanente são fabricados com várias configurações de fio condutor.
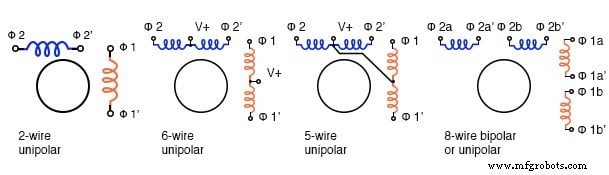
Diagramas de fiação do motor de passo
- O motor de 4 fios só pode ser acionado por formas de onda bipolares.
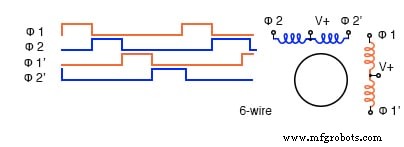
- O motor de 6 fios, o arranjo mais comum, é projetado para acionamento unipolar por causa das derivações centrais. Porém, pode ser impulsionado por ondas bipolares se os toques no centro forem ignorados.
- O motor de 5 fios só pode ser acionado por ondas unipolares, pois a torneira central comum interfere se os dois enrolamentos forem energizados simultaneamente.
- A configuração de 8 fios é rara, mas oferece o máximo de flexibilidade. Ele pode ser conectado tanto para um inversor unipolar quanto para o motor de 6 ou 5 fios. Um par de bobinas pode ser conectado em série para acionamento de corrente baixa bipolar de alta tensão ou em paralelo para acionamento de corrente alta de baixa tensão.
Um enrolamento bifilar é produzido enrolando as bobinas com dois fios em paralelo, geralmente um fio esmaltado vermelho e verde. Este método produz taxas de espiras de 1:1 exatas para enrolamentos com rosca central. Este método de enrolamento é aplicável a todos, exceto ao arranjo de 4 fios acima.
Unidade de passo completo
Etapa completa o inversor fornece mais torque do que o acionamento por onda porque ambas as bobinas são energizadas ao mesmo tempo. Isso atrai os pólos do rotor a meio caminho entre os dois pólos do campo. (Figura abaixo)
Etapa completa, impulso bipolar
O impulso bipolar de passo completo, conforme mostrado acima, tem o mesmo ângulo de passo que o impulso de onda. A unidade unipolar (não mostrada) exigiria um par de formas de onda unipolares para cada uma das formas de onda bipolares acima aplicadas às extremidades de um enrolamento com derivação central. O drive unipolar usa um circuito de driver menos complexo e menos caro. O custo adicional do acionamento bipolar é justificado quando mais torque é necessário.
Percurso de meio passo
O ângulo de passo para uma dada geometria de motor de passo é cortado pela metade com meio passo dirigir. Isso corresponde a duas vezes mais pulsos de passo por revolução. (Figura abaixo) O meio passo fornece maior resolução no posicionamento do eixo do motor.
Por exemplo, dar meia-volta no motor movendo a cabeça de impressão sobre o papel de uma impressora jato de tinta dobraria a densidade do ponto.
Meio passo, impulso bipolar
Half step drive é uma combinação de wave drive e full step drive com um enrolamento energizado, seguido por ambos os enrolamentos energizados, produzindo o dobro de passos. As formas de onda unipolares para drive de meio passo são mostradas acima. O rotor é alinhado com os pólos de campo no acionamento das ondas e entre os pólos no acionamento de passo completo.
Microstepping é possível com controladores especializados. Ao variar, as correntes para os enrolamentos sinusoidalmente, muitos micro-passos podem ser interpolados entre as posições normais. A construção de um motor de passo de ímã permanente é consideravelmente diferente dos desenhos acima.
É desejável aumentar o número de pólos além do ilustrado para produzir um ângulo de degrau menor. Também é desejável reduzir o número de enrolamentos, ou pelo menos não aumentar o número de enrolamentos para facilitar a fabricação.
Construção
A construção de um motor de passo de ímã permanente é consideravelmente diferente dos desenhos acima. É desejável aumentar o número de pólos além do ilustrado para produzir um ângulo de degrau menor. Também é desejável reduzir o número de enrolamentos, ou pelo menos não aumentar o número de enrolamentos para facilitar a fabricação.
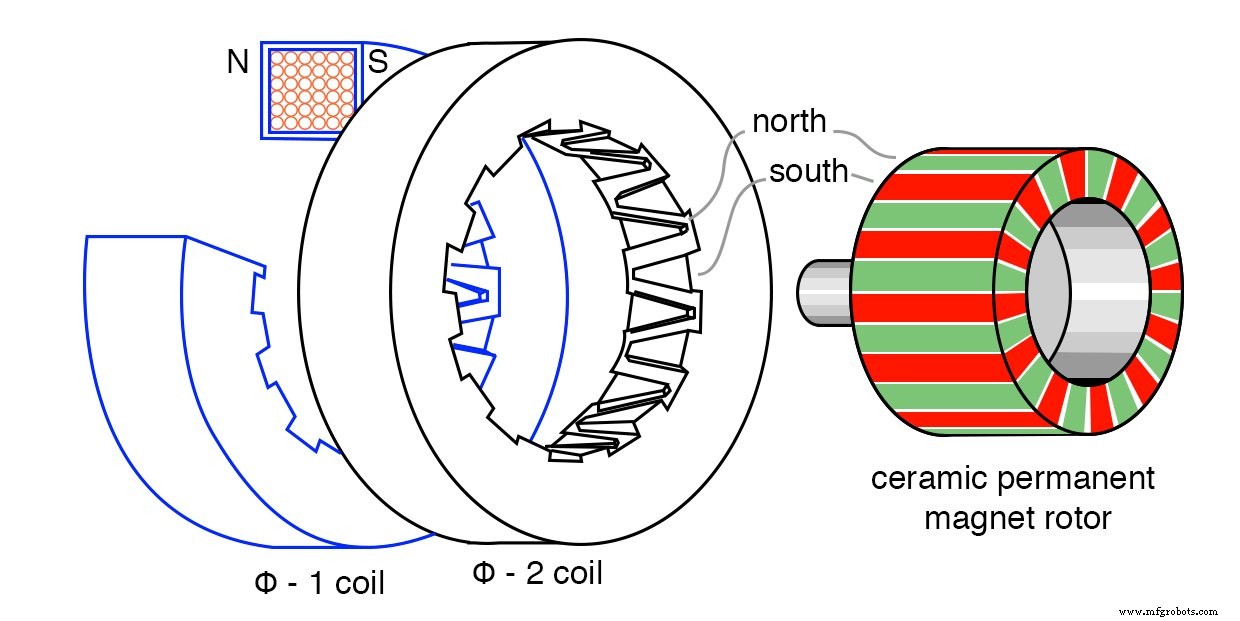
Motor de passo de ímã permanente, construção em pilha de 24 pólos
O passo de íman permanente tem apenas dois enrolamentos, mas tem 24 pólos em cada uma das duas fases. Este estilo de construção é conhecido como pode empilhar . Um enrolamento de fase é envolto em uma concha de aço macio, com os dedos colocados no centro.
Uma fase, em uma base transitória, terá um lado norte e um lado sul. Cada lado envolve o centro do donut com doze dedos interdigitados para um total de 24 pólos. Esses dedos alternados norte-sul atrairão o rotor do ímã permanente.
Se a polaridade da fase fosse invertida, o rotor saltaria 360 ° / 24 =15 ° . Não sabemos em que direção, o que não é útil. No entanto, se energizarmos φ-1 seguido por φ-2, o rotor se moverá 7,5 ° porque o φ-2 é deslocado (girado) em 7,5 ° de φ-1. Veja abaixo o deslocamento. E, ele irá girar em uma direção reproduzível se as fases forem alternadas.
A aplicação de qualquer uma das formas de onda acima fará girar o rotor do ímã permanente.
Observe que o rotor é um cilindro de cerâmica de ferrite cinza magnetizado no padrão de 24 pólos mostrado. Isso pode ser visto com filme visualizador de ímã ou limalha de ferro aplicada a uma embalagem de papel. Porém, as cores serão verdes para os pólos norte e sul com o filme.
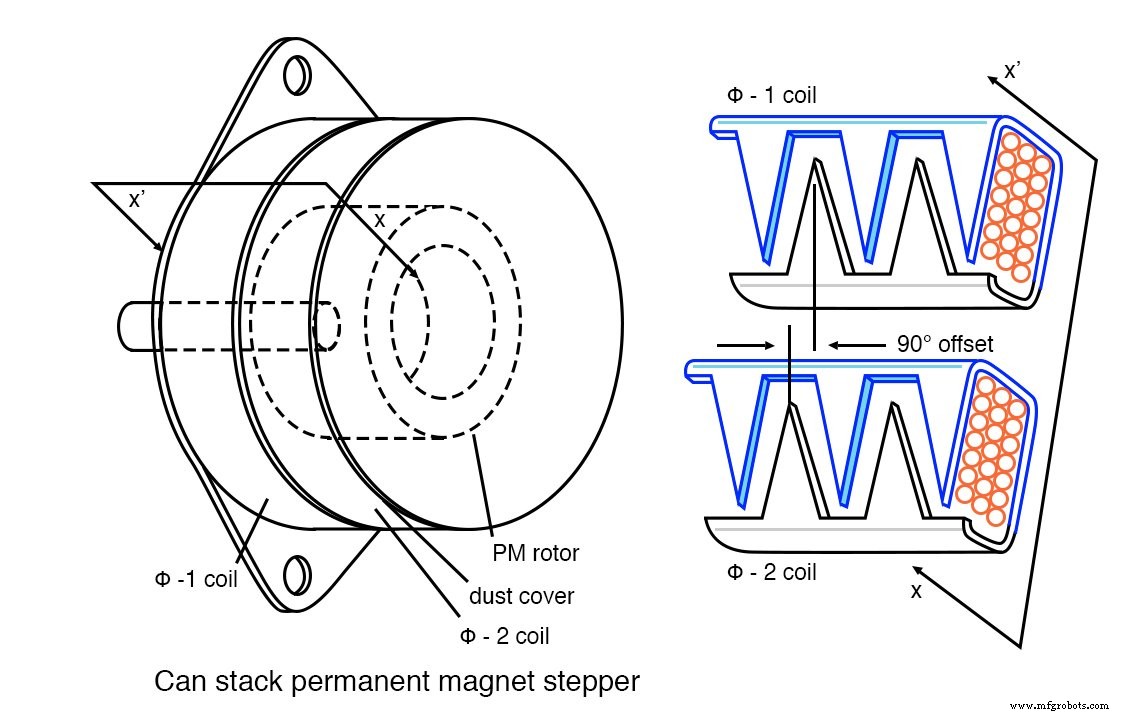
(a) External view of can stack, (b) field offset detail
Can-stack style construction of a PM stepper is distinctive and easy to identify by the stacked “cans” (figure above). Note the rotational offset between the two-phase sections. This is key to making the rotor follow the switching of the fields between the two phases.
Summary:permanent magnet stepper motor
- The rotor is a permanent magnet, often a ferrite sleeve magnetized with numerous poles.
- Can-stack construction provides numerous poles from a single coil with interleaved fingers of soft iron.
- Large to moderate step angle.
- Often used in computer printers to advance the paper.
Hybrid Stepper Motor
The hybrid stepper motor combines features of both the variable reluctance stepper and the permanent magnet stepper to produce a smaller step angle. The rotor is a cylindrical permanent magnet, magnetized along the axis with radial soft iron teeth.
The stator coils are wound on alternating poles with corresponding teeth. There are typically two winding phases distributed between pole pairs. This winding may be center tapped for a unipolar drive. The center tap is achieved by a bifilar winding , a pair of wires wound physically in parallel but wired in series.
The north-south poles of a phase swap polarity when the phase drive current is reversed. The bipolar drive is required for un-tapped windings.
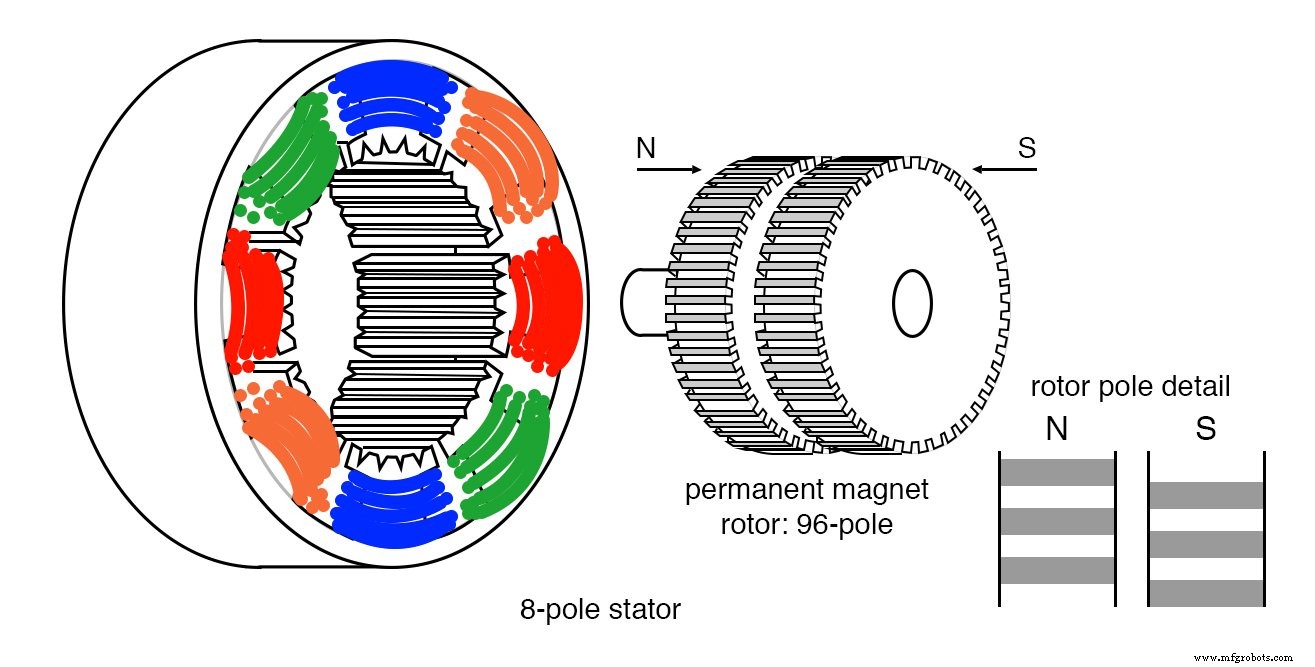
Hybrid stepper motor
Note that the 48-teeth on one rotor section are offset by half a pitch from the other. (See rotor pole detail above. This rotor tooth offset is also shown below.) Due to this offset, the rotor effectively has 96 interleaved poles of opposite polarity.
This offset allows for rotation in 1/96 th of a revolution steps by reversing the field polarity of one phase. Two-phase windings are common as shown above and below. Though, there could be as many as five phases.
The stator teeth on the 8-poles correspond to the 48-rotor teeth, except for missing teeth in the space between the poles. Thus, one pole of the rotor, say the south pole, may align with the stator in 48 distinct positions. However, the teeth of the south pole are offset from the north teeth by half a tooth.
Therefore, the rotor may align with the stator in 96 distinct positions. This half tooth offset shows in the rotor pole detail above or Figure below.
As if this were not complicated enough, the stator main poles are divided into two phases (φ-1, φ-2). These stator phases are offset from one another by one-quarter of a tooth. This detail is only discernible on the schematic diagrams below. The result is that the rotor moves in steps of a quarter of a tooth when the phases are alternately energized.
In other words, the rotor moves in 2×96=192 steps per revolution for the above stepper.
The above drawing is representative of an actual hybrid stepper motor. However, we provide a simplified pictorial and schematic representation to illustrate details not obvious above. Note the reduced number of coils and teeth in rotor and stator for simplicity.
In the next two figures, we attempt to illustrate the quarter tooth rotation produced by the two stator phases offset by a quarter tooth, and the rotor half tooth offset. The quarter tooth stator offset in conjunction with drive current timing also defines the direction of rotation.
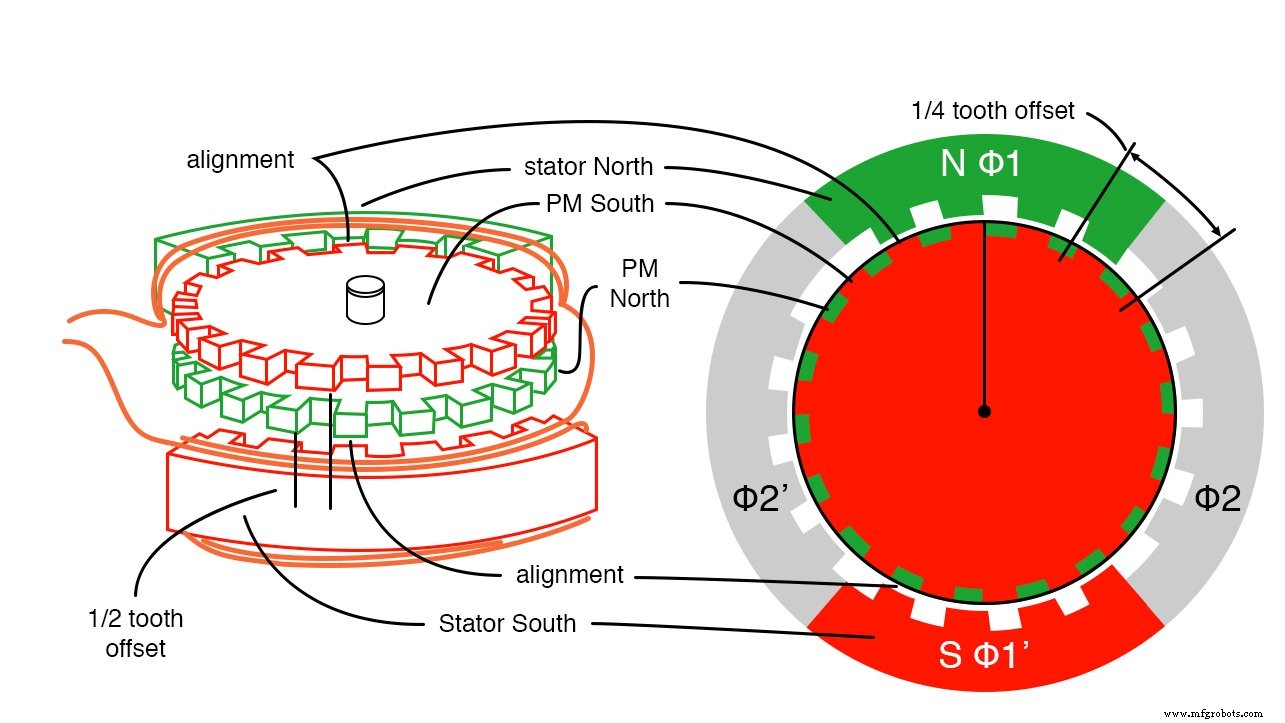
Hybrid stepper motor schematic diagram
Features of Hybrid Stepper Schematic
- The top of the permanent magnet rotor is the south pole, the bottom north.
- The rotor north-south teeth are offset by half a tooth.
- If the φ-1 stator is temporarily energized north top, south bottom.
- The top φ-1 stator teeth align north to rotor top south teeth.
- The bottom φ-1’ stator teeth align south to rotor bottom north teeth.
- Enough torque applied to the shaft to overcome the hold-in torque would move the rotor by one tooth.
- If the polarity of φ-1 were reversed, the rotor would move by one-half tooth, direction unknown. The alignment would be south stator top to north rotor bottom, north stator bottom to the south rotor.
- The φ-2 stator teeth are not aligned with the rotor teeth when φ-1 is energized. In fact, the φ-2 stator teeth are offset by one-quarter tooth. This will allow for rotation by that amount if φ-1 is de-energized and φ-2 energized. The polarity of φ-1 and drive determine the direction of rotation.
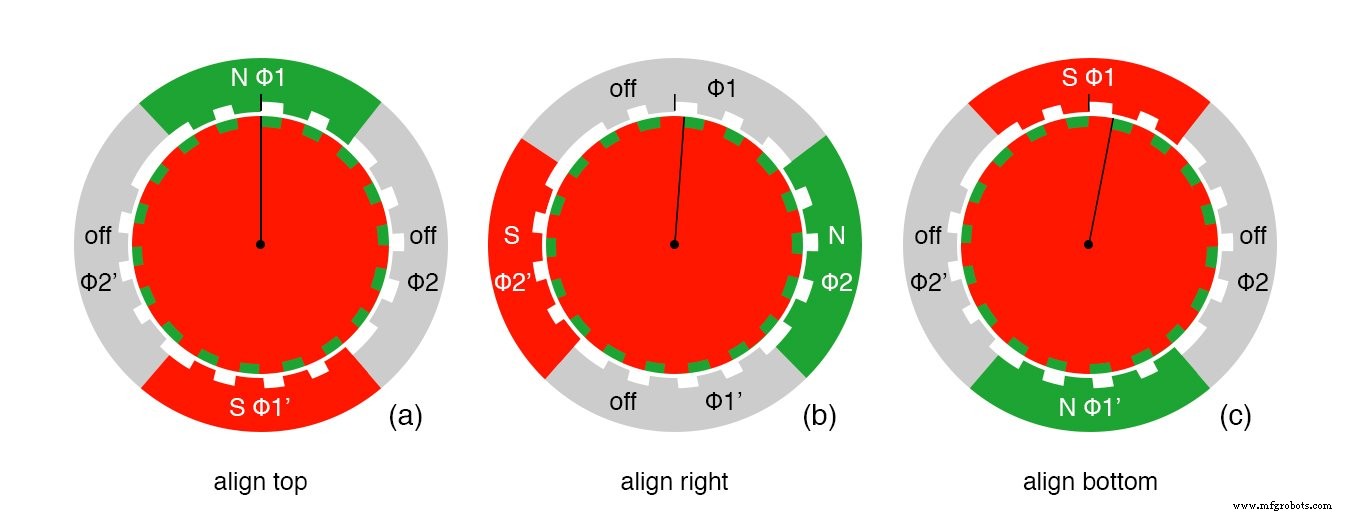
Hybrid stepper motor rotation sequence
Hybrid Stepper Motor Rotation
- Rotor top is permanent magnet south, bottom north. Fields φ1, φ-2 are switchable:on, off, reverse.
- (a) φ-1=on=north-top, φ-2=off. Align (top to bottom): φ-1 stator-N:rotor-top-S, φ-1’ stator-S:rotor-bottom-N. Start position, rotation=0.
- (b) φ-1=off, φ-2=on. Align (right to left): φ-2 stator-N-right:rotor-top-S, φ-2’ stator-S:rotor-bottom-N. Rotate 1/4 tooth, total rotation=1/4 tooth.
- (c) φ-1=reverse(on), φ-2=off. Align (bottom to top): φ-1 stator-S:rotor-bottom-N, φ-1’ stator-N:rotor-top-S. Rotate 1/4 tooth from the last position. Total rotation from start:1/2 tooth.
- Not shown:φ-1=off, φ-2=reverse(on). Align (left to right): Total rotation:3/4 tooth.
- Not shown:φ-1=on, φ-2=off (same as (a)). Align (top to bottom): Total rotation 1-tooth.
An unpowered stepper motor with detent torque is either a permanent magnet stepper or a hybrid stepper. The hybrid stepper will have a small step angle, much less than the 7.5° of permanent magnet steppers. The step angle could be a fraction of a degree, corresponding to a few hundred steps per revolution. Summary:Hybrid Stepper Motor
- The step angle is smaller than variable reluctance or permanent magnet steppers.
- The rotor is a permanent magnet with fine teeth. North and south teeth are offset by half a tooth for a smaller step angle.
- The stator poles have matching fine teeth of the same pitch as the rotor.
- The stator windings are divided into no less than two phases.
- The poles of one stator windings are offset by a quarter tooth for an even smaller step angle.
PLANILHA RELACIONADA:
- Stepper Motors Worksheet
Tecnologia industrial
- Motores de indução monofásicos
- Motores do comutador CA
- Nanotec:controlador de motor compacto para motores CC sem escovas e motores de passo
- Dica técnica:Motores
- A área cinzenta entre servomotores e motores de passo
- Segurança do motor elétrico:diferentes fases e medidas de segurança
- 4 principais tipos de falhas de enrolamento em motores elétricos CA
- Sobre motores industriais e aplicações
- Uma introdução ao motor BLDC
- Manutenção adequada dos motores do compressor