


Tipos de juntas de robôs:um guia detalhado
Fonte:www. idtechex.com
A automação na indústria de manufatura está ganhando impulso rapidamente com mais empresas adotando o uso da robótica. Isso é atribuído aos benefícios da automação nos negócios e ao uso de processos mais inteligentes e inteligentes. Você consegue ter mais produção e também reduz o risco de acidentes na fábrica. A maioria das empresas está se inclinando para o uso de braços robóticos para atender a retirada e colocação, embalagem, pintura e montagem, entre outras tarefas.
À medida que incorpora braços robóticos ao seu negócio, assegure-se de trabalhar com um fabricante de braços robóticos de qualidade que lhe oferecerá o melhor. Além disso, também é essencial ter uma compreensão básica do que elas envolvem. O braço robótico apresenta o corpo, o pulso e o efetor final que têm funções específicas. Para que essas diferentes peças funcionem com precisão, é necessário a presença de articulações do robô. Neste artigo, vamos nos aprofundar nas diferentes articulações robóticas para lhe dar uma melhor compreensão.
Índice
O que são juntas de robôs?
Fonte:www. researchgate.net
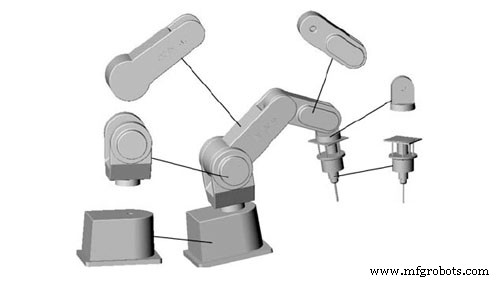
As juntas do robô referem-se aos componentes móveis do robô que resultam em movimentos relativos entre os links adjacentes. Neste contexto, os links são usados para se referir aos membros rígidos que conectam as juntas para um funcionamento claro e adequado. Isso mostra que o braço robótico industrial apresenta o uso de uma combinação de elos e juntas para uma funcionalidade ideal. É essencial garantir que as juntas em seu manipulador estejam funcionando de acordo para garantir que haja precisão e exatidão durante a aplicação.
As articulações robóticas também são às vezes chamadas de eixos. Eles são essenciais e são úteis para garantir que o movimento do braço não seja limitado ou interferido. Aprender mais sobre as articulações robóticas o ajudará a determinar o tipo de braço robótico com o qual deseja trabalhar, dependendo das tarefas que deseja realizar.
Tipos de juntas mecânicas para robôs
Fonte:www. britannica.com
Dado que existem diferentes tipos de robôs usados na indústria de manufatura, você também encontrará uma variedade de juntas mecânicas. Essas juntas diferem em termos de movimento e também de aplicação, especialmente no que diz respeito ao tipo de robô a ser usado.
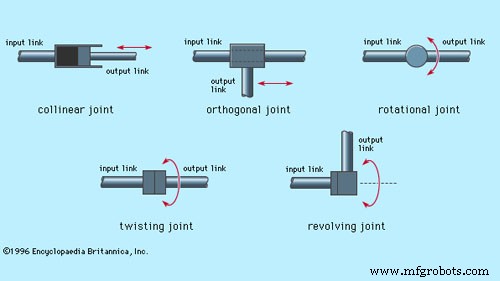
Quando se trata das juntas mecânicas dos braços robóticos, há cinco tipos principais que você precisa considerar. Duas das juntas são lineares, o que significa que o movimento relativo entre os links adjacentes é translacional. Por outro lado, os outros três são rotativos, o que significa que o movimento relativo dos elos envolve rotações entre eles. Os cinco tipos de juntas mecânicas para robôs incluem:
Juntas lineares
Nas juntas lineares, o movimento relativo apresentado pelos links adjacentes deve ser paralelo. Isso significa que os links de entrada e saída estão deslizando em um movimento linear. Esse tipo de movimento resulta em um movimento translacional. Esse tipo de movimento linear pode ser obtido de várias maneiras, incluindo o uso do mecanismo telescópico e do pistão. Esse tipo de junta também é conhecido como junta em L.
Juntas ortogonais
As juntas ortogonais também são popularmente chamadas de juntas tipo O. Eles apresentam um movimento relativo obtido pelo link de entrada e pelo link de saída. Este tipo de movimento envolvido nas articulações ortogonais é um movimento de deslizamento translacional. No entanto, ao contrário do arranjo de juntas lineares, com a junta ortogonal, o link de saída é perpendicular ao link de entrada.
Juntas de rotação
Quando se trata de juntas rotacionais, você encontrará o uso de movimentos relativos de rotação que são úteis para manipuladores de robôs que trabalham em vários espaços de trabalho. Esses movimentos são realizados com o eixo de rotação perpendicular aos eixos dos elos de entrada e saída. Essas juntas rotacionais também são chamadas de juntas do tipo R.
Juntas torcidas
Este tipo de junta apresenta movimento rotativo que também resulta em algum grau de rotação quando em uso. O movimento nessas articulações é relativo ao eixo de rotação que é perpendicular aos eixos dos links de entrada e saída. As juntas de torção também são conhecidas como juntas do tipo T.
Juntas giratórias
Nas juntas giratórias, as coisas são um pouco diferentes em comparação com as outras. Essas juntas também apresentam um movimento rotacional que é útil em diferentes aplicações. O movimento dessas articulações apresenta movimento entre os dois links. O eixo do link de entrada é projetado para ser paralelo ao eixo de rotação da junta. Por outro lado, o eixo do elo de saída é projetado para ser perpendicular ao eixo de rotação da junta. Este tipo de junta também é conhecido como junta Tipo V.
Diferentes tipos de robôs e juntas mecânicas usadas

Fonte:www. technologyreview.com
Diferentes robôs apresentarão o uso de diferentes tipos de juntas mecânicas. Aprender mais sobre os diferentes robôs o colocará em uma posição melhor para investir em um robô que funcione para você. Alguns dos robôs mais comuns a serem considerados incluem:
Articulado
O projeto do robô articulado provavelmente virá com diferentes faixas e combinações de juntas rotativas. Esta faixa pode apresentar 2 estruturas de junta simples e mover para estruturas mais complexas com 10 ou mais juntas. Com este projeto, o braço é conectado à base com o uso de uma junta de torção enquanto os elos do braço são conectados por juntas rotativas.
Cartesiano
Com os robôs cartesianos, o projeto prevê o uso de três juntas lineares. Essas articulações são apresentadas no plano cartesiano que envolve X, Y e Z. Esses robôs também podem apresentar um pulso conectado com articulações de rotação mais fáceis para o movimento. Esse tipo específico de robô também é conhecido como retilíneo ou pórtico.
Cilíndrico
O robô cilíndrico possui uma junta rotativa que é anexada à base e uma junta linear usada para conectar os diferentes links. Dado que os robôs cilíndricos trabalham em um escopo de trabalho em forma cilíndrica, o movimento rotacional e linear é útil para garantir que a precisão seja alcançada.
Polar
No design polar de robôs, o braço é conectado à base por meio de uma junta de torção. Às vezes, você também encontrará o uso de uma combinação de duas juntas rotativas e uma junta linear. Uma vez que este robô também é conhecido como robô esférico, o escopo de trabalho a ser apresentado também será esférico. Os eixos usados neste robô formam um sistema de coordenadas polares que permite ao manipulador trabalhar com facilidade.
SCARA
O robô SCARA é uma opção popular entre muitos fabricantes, especialmente aqueles que buscam automatizar seus processos de montagem. Este robô é geralmente cilíndrico e funciona em um escopo de trabalho relativamente cilíndrico. Possui o uso de duas juntas paralelas que são úteis no processo de montagem. Essas juntas fornecem conformidade em um plano selecionado conforme o robô está em uso.
Delta
Os robôs delta são projetados com uma construção semelhante a uma aranha que lhes permite oferecer excelentes serviços aos seus usuários. Eles são construídos a partir de paralelogramos que são unidos e conectados a uma base comum. As juntas apresentadas neste tipo de robô são rotacionais e lineares. Isso permite que o robô mova uma única extremidade da ferramenta do braço em uma área de trabalho em forma de cúpula. Ele aprimora seu desempenho para garantir que o desenvolvimento de diferentes tarefas seja realizado com precisão.
Conclusão
Ao trabalhar com a robótica como meio de automatizar diferentes processos em seu negócio, é preciso ter em mente os diferentes aspectos. Esses aspectos desempenham um grande papel no desempenho da robótica específica que você escolhe usar. Quando se trata de usar braços robóticos industriais, as articulações do robô devem ser algo para se manter atualizado.
Conheça as diferentes articulações e como elas afetam o desempenho do robô. Isso o ajudará a avaliar o tipo de articulação mais adequado para as atividades que você deseja automatizar. Depois de fazer isso, você pode investir em braços de robô que vêm com as articulações que você está procurando. Tome seu tempo e trabalhe com fabricantes de equipamentos de automação que irão ajudá-lo.
Robô industrial
- Tipos de dados C++
- Tipos de dados C
- t é SFM em Usinagem?
- Os 10 maiores fabricantes de robôs industriais em 2020
- Robôs Industriais - O Guia Definitivo
- Robótica na Manufatura Automotiva
- Sistema de depósito do robô:o que é e como é usado
- Robot Gripper:O que é e como é usado para robôs
- Quais são os benefícios dos braços de robô para humanos?
- Automação industrial