


Singularidade da Robótica:O que é nos Braços Robóticos

Fonte:www. idtechex.com
O uso de braços robóticos na indústria de manufatura está crescendo, com mais empresas obtendo os benefícios do uso de braços robóticos. Se você planeja incorporar braços robóticos em seus processos de negócios, deve garantir que está bem informado. Procure um fabricante de braço robótico de qualidade com o qual você possa trabalhar para obter resultados de qualidade.
O braço robótico apresenta o corpo, o pulso e também o efetor final. O efetor final é o que é usado para manter diferentes produtos ou realizar várias tarefas. Na maioria dos casos, você precisará do efetor final para se mover em diferentes direções com precisão. É aqui que você precisa se certificar de que está ciente da singularidade do robô e de como isso afeta o desempenho de seu braço robótico. Neste artigo, aprofundamos a singularidade do robô e por que é essencial mantê-la em mente.
Índice
O que é a singularidade do robô

Fonte:www. technologyreview.com
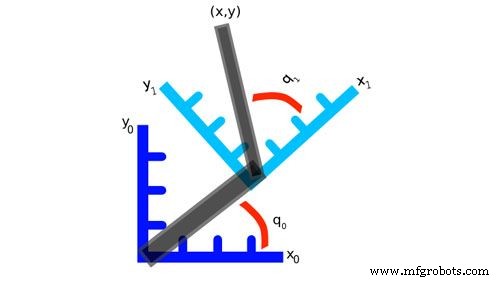
A singularidade do robô se refere a uma configuração em que o movimento do executor final do robô é bloqueado em certas direções. Essa configuração resulta em um limite para a eficiência e precisão do braço robótico com o qual você está trabalhando. Geralmente, quando se trata de braços robóticos de 6 eixos, eles funcionam movendo-se em movimentos relativos aos eixos X, Y e Z em um plano 3D ou cartesiano. É composto por 6 articulações que contribuem para os 6 graus de liberdade experimentados pelo braço robótico durante a ação.
Esse grau de liberdade permite que o braço robótico se mova em diferentes direções e execute facilmente as tarefas para as quais foi projetado. Se por acaso o executor final do robô não conseguir chegar aos produtos ou se mover na direção errada, é aí que entra o problema da singularidade. Algumas singularidades são bastante fáceis de identificar e resolver, permitindo que você volte para o seu tarefas. No entanto, por outro lado, alguns robôs experimentarão singularidades mais difíceis de identificar, a menos que com a ajuda de fórmulas complexas e longas.
O que afeta a singularidade do robô?
Fonte:www. mecademic.com
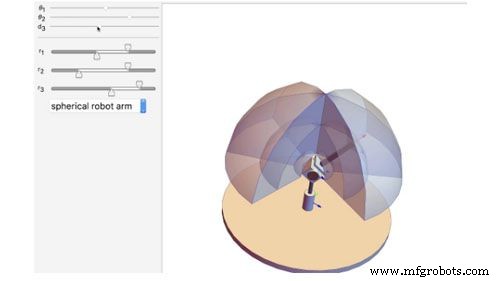
A singularidade do robô apresentará diferentes efeitos e também desafios, especialmente na identificação de problemas específicos. Esses desafios variam dependendo de alguns fatores apresentados no braço robótico com o qual você trabalhará. A complexidade e a gravidade da singularidade experimentada por seu robô dependem do número de juntas, tipo de robô (linear ou rotativo) e do arranjo geométrico.
Um braço de robô industrial possui dois espaços onde pode ser facilmente controlado. Geralmente é o espaço comum e o espaço cartesiano. Com os diferentes espaços onde o braço robótico opera, você descobre que ele apresentará dois conjuntos de comandos de movimento do modo de posição.
Quando se trata dos comandos do espaço articular, o robô receberá instruções específicas com o conjunto desejado de espaços articulares. Em seguida, ele se moverá para trazer cada junta para o posicionamento de junta sugerido em uma translação linear e simultânea. Com os comandos do espaço cartesiano, a sugestão ao robô contará com a pose desejada para o efetor final com um caminho cartesiano específico. O caminho cartesiano é projetado para ser linear ou circular.
Para que o robô se alinhe precisamente com a junta cartesiana e os comandos, o controlador do robô calcula a posição inversa e a cinemática da velocidade do robô. Isso resulta no posicionamento correto do efetor final para realizar a tarefa projetada. No entanto, se os cálculos estiverem errados, as singularidades ocorrem onde você descobre que o efetor final não está posicionado com precisão. Isso mostra as configurações que você deseja evitar para evitar que os problemas de singularidade atrapalhem seus processos de automação.
Funções da singularidade do robô

Fonte:www. dignited.com
As singularidades reconhecidas do robô devem ser evitadas a todo custo para garantir que seu braço robótico industrial possa trabalhar da melhor forma nas tarefas desejadas. Aprender mais sobre a função da singularidade do robô lhe dará uma melhor compreensão de por que você deve tentar evitá-la. A singularidade do robô está associada principalmente a duas funções distintas.
O declínio no mapeamento de velocidade
Fonte:studywolf. wordpress.com
Considere dois robôs cartesianos usados para orientar seus efetores finais em direções diferentes. Os dois robôs apresentam o posicionamento de seis eixos com pilhas de três guias lineares ortogonais e três estágios de rotação. Quando o robô usado pode manter os eixos e juntas onde deveriam estar, então a orientação do efetor final é fácil.
Ele pode usar continuamente o efetor final ao longo do caminho 6D em seu espaço de trabalho, mantendo a precisão e exatidão. Porém, quando os eixos e as juntas coincidem, ocorre uma singularidade e o robô não consegue mais se mover com os 6 graus de liberdade à sua disposição.
Com este robô, você descobre que ele não pode girar seu efetor final em torno dos eixos que coincidem com as juntas de rotação. Esse tipo de singularidade costuma ser conhecido como bloqueio de cardan. Dado que a maioria das singularidades é resolvida com a ajuda de equações, você descobre que se torna mais difícil determinar a velocidade de certos vetores cartesianos. Quando a singularidade ocorre, ela prejudica a capacidade de você descobrir a intensidade em números associados às velocidades apresentadas.
Ser capaz de medir as velocidades de um braço robótico é essencial para garantir que você observe a segurança. Ao enfrentar um problema de singularidade, você descobre que ele representa um grande risco para a robótica, embora eles ainda não estejam nesse ponto. Isso resulta em altas velocidades de junta que podem ser perigosas, especialmente se você estiver trabalhando com robôs industriais grandes e rápidos. É por isso que mapear as velocidades com as quais você está trabalhando é tão importante.
Limites limitados do espaço de trabalho interno
Fonte:Youtube
Quando se trata da singularidade do robô, ela não afeta apenas a cinemática da velocidade inversa, mas também desce para as equações cinemáticas da posição inversa. Ao trabalhar com robôs industriais, você descobrirá que eles apresentam equações e soluções para diferentes posições de junta. As diferentes soluções apresentadas estão intimamente ligadas aos diferentes tipos de configuração.
Por exemplo, se o seu robô apresenta 8 soluções exclusivas para posições de junta até a posição do efetor final, ele também apresentará 8 tipos de configuração diferentes. Para alterar um tipo de configuração, você teria que passar por uma singularidade. Singularidades são os limites encontrados entre as entidades 6D apresentadas no espaço de trabalho cartesiano é um robô de 6 eixos típico. Isso limita as diferentes configurações que você pode alcançar e os limites do espaço de trabalho disponíveis para o seu robô industrial.
Tipos de singularidade do robô em um robô articulado verticalmente

Fonte:blog. grabcad.com
Dado o fato de que as singularidades do robô podem ocorrer em qualquer braço robótico industrial com o qual você está trabalhando, é importante perceber que existem diferentes tipos. Assim como o braço robótico vem em partes diferentes, as singularidades também afetarão essas partes diferentes, resultando em uma variedade de problemas.
Aqui, é importante ter em mente os diferentes eixos de articulações dos braços robóticos industriais. Você estará trabalhando com 2 e 3 que são paralelos, 1 e 4 que são normais a 2 e 3, o eixo da articulação 5 que é normal para as articulações dos eixos 4 e 6. Agora que você tem uma melhor compreensão do diferentes eixos e articulações você está em um lugar melhor para explorar os tipos de singularidade. Os tipos mais aparentes de singularidades em um braço de robô articulado verticalmente a serem considerados incluem:
Singularidade de pulso
Fonte:sites. google.com
Quando se trata de braços de robô articulados verticalmente com pulsos em linha, eles tendem a ter a singularidade do pulso como o problema mais comum. Este tipo de singularidade ocorre quando os eixos das juntas 4 e 6 coincidem. Quando isso acontece, o pulso não é capaz de mover o efetor final na direção do eixo da junta 5. Na aplicação, considere um braço de robô industrial que esteja trabalhando com precisão.
Para que siga uma linha através da singularidade, as juntas 4 e 6 devem ser simultâneas e girar a 90 graus. Isso será feito em direções opostas para garantir que o processo seja preciso. Isso mostra que cruzar a singularidade de um pulso é viável. No entanto, quando você chega à singularidade, o efetor final permanece imóvel enquanto as duas articulações giram. Para que o efetor final cruze a singularidade, ele precisa parar primeiro. Se estivesse em uso, prejudicaria a precisão do braço industrial durante o trabalho. Existem inúmeras soluções para a singularidade do pulso que podem ser facilmente implementadas para corrigir o problema.
Singularidade do cotovelo

Fonte:www. electronicsteacher.com
O segundo tipo de singularidade que você pode encontrar ao trabalhar com braços de robô articulados verticalmente com pulsos em linha é a singularidade do cotovelo. Ocorre principalmente quando o centro do punho se encontra no plano que passa pelos eixos das articulações 2 e 3. O centro do punho é usado para se referir ao ponto onde os eixos das articulações 4, 5 e 6 se cruzam. Na singularidade do cotovelo, você descobrirá que o braço está totalmente esticado e também pode apresentar alguns casos em que não pode ser totalmente dobrado. Esse tipo de singularidade é determinado principalmente pelo eixo e pela posição da articulação 3. A singularidade do cotovelo também apresenta algumas soluções que podem ajudá-lo a resolver quaisquer problemas de desempenho que possa estar ocorrendo com seu braço robótico. Esse tipo de singularidade ocorre com bastante frequência e pode ser facilmente previsto e também evitado.
Singularidade do ombro
Fonte:blenderartists. org
A singularidade final que você pode encontrar é a singularidade do ombro que ocorre quando o centro do pulso do robô está na linha que passa pelos eixos das articulações 1 e 2. Esta singularidade é a mais complexa entre as demais, uma vez que não depende de uma única posição de articulação. Com a singularidade do ombro, a limitação é colocada no movimento na direção do eixo da articulação 2.
Na aplicação, para o robô seguir uma linha através da singularidade do ombro, as articulações 1 e 4 devem girar simultaneamente em um ângulo de 90 graus. Esta rotação, como na singularidade do pulso, é feita em direções opostas enquanto o efetor final permanece constante. Como na singularidade do pulso, o movimento através da singularidade do ombro é possível, entretanto, o efetuador final terá que parar para tornar isso possível. Essa singularidade também apresenta algumas soluções que podem ser implementadas para garantir que o braço robótico volte a funcionar da melhor forma.
Tipos de singularidade em um robô colaborativo de seis eixos (Cobot)

Fonte:www. istockphoto.com
Quando se trata de robôs colaborativos, você encontrará os eixos das juntas 2, 3 e 4 que são paralelos, o eixo da junta 1 se cruza e é normal aos eixos da junta 2. Além disso, também apresenta o eixo da junta 5 que se cruza e é normal aos eixos das juntas 4 e 6. Como as singularidades nos robôs articulados, esses robôs também apresentam soluções diferentes em relação aos diferentes tipos de configuração. Os tipos de singularidades incluídas no Cobots incluem:
Singularidade de pulso
A singularidade do pulso nesses robôs ocorre quando os eixos das articulações 4 e 6 tornam-se paralelos. Nesta situação, você pode descobrir que os eixos das juntas 2, 3, 4 e 5 podem se mover enquanto o efetor final permanece constante.
Singularidade do cotovelo
Nesses robôs, a singularidade do cotovelo ocorre quando os eixos das articulações 2, 3 e 4 estão no mesmo plano. Isso limita muito o movimento do efetor final e, por sua vez, afeta o desempenho do braço robótico.
Singularidade do ombro
A singularidade do ombro ocorre quando o ponto de intersecção dos eixos das juntas 5 e 6 encontra-se no plano que passa pelos eixos das juntas 1 e 2. Aqui existem algumas soluções que podem ser implementadas para remediar a singularidade e ter um robô industrial funcionando.
Como evitar a singularidade na robótica

Fonte:www. ennomotive.com
Com os diferentes efeitos que a singularidade do robô tem nos processos de fabricação, ter formas de evitá-los é essencial. Visto que tipos diferentes de robôs, as singularidades variam dependendo do tipo de robô com o qual você está trabalhando, ter um conhecimento básico de como evitá-los garantirá que seus processos sejam executados com facilidade. Geralmente, as singularidades só podem ser evitadas garantindo que as células robóticas sejam projetadas corretamente. Isso também se estende ao design apresentado na placa adaptadora que você escolhe para usar em seu efetor final.
Por exemplo, se por acaso você configurar seu braço robótico e atribuir incorretamente um local de escolha para corresponder a uma singularidade do pulso, então não há muito que você possa fazer para resolver o problema. Com isso, a única coisa a fazer é verificar se a pose pode ser usada em uma aplicação não singular. Além disso, singularidades também podem ser evitadas adicionando pequenos ângulos ao ferramental. Isso ajuda muito a reduzir as chances de o robô se mover para uma singularidade. Esta é uma técnica usada principalmente por técnicos que entendem de mecânica e podem ajustar as soluções a seu favor.
Por último, as singularidades também podem ser evitadas adotando-se a abordagem de programação e tendo a matemática para ajudá-lo a cuidar das coisas. Nisto, você verá que o número de eixos é bastante reduzido para permitir evitar a singularidade. Principalmente porque um número maior de eixos aumenta as chances de ocorrência de singularidades. Lembre-se de que as singularidades ocorrem quando os eixos se alinham, bloqueando o movimento dos braços robóticos em certas direções. Reduzir o número de eixos também diminui as chances de eles se alinharem e causar bloqueios.
Conclusão
A singularidade do robô é um grande problema experimentado em diferentes aplicações industriais de braços robóticos e outros equipamentos de automação. Lidar com esses problemas sozinho pode ser uma chatice, por isso você deve tentar evitar a singularidade do robô. No entanto, se você encontrar esse problema, poderá encontrar uma solução ou contratar um técnico experiente que cuidará do problema.
Como alternativa, estabeleça uma relação de trabalho próxima com um fabricante de equipamentos de automação de renome que o ajudará quando você encontrar alguma singularidade. Leve o seu tempo para garantir que o seu equipamento robótico funcione bem para ajudá-lo a personalizar totalmente e capitalizar sobre o uso dele para o seu negócio.
Robô industrial
- Envelope de trabalho do robô:O que é?
- Diferentes graus de liberdade nos braços de robótica:Uma explicação completa
- Braços robóticos na manufatura e seus benefícios
- Quais são os benefícios dos braços de robô para humanos?
- O que é um pulso de robô:um guia definitivo
- O que é soldagem robótica? - Processo e aplicação
- O que são Cobots?
- Robótica Guiada por Visão
- O que é soldagem robótica? - Processo e aplicação
- O que é um robô de bebidas?