


Cobots 2026:Como funcionam os robôs colaborativos e por que são importantes

Pela equipe editorial da EVST · Última atualização:10 de junho de 2026
Um robô colaborativo, ou cobot, é um braço industrial leve projetado para operar ao lado de pessoas sem a necessidade de uma cerca de segurança. Isto é conseguido através da limitação de potência e força:sensores de torque em cada articulação entram em contato e param ou retraem imediatamente o braço antes que uma colisão possa causar ferimentos. A ISO/TS 15066 descreve quatro modos de colaboração que definem a proximidade permitida entre um humano e um robô. Em 2026, as cargas úteis dos cobots normalmente variam de 3 kg a 30 kg, com alcances que variam de aproximadamente 600 mm a 1.800 mm.
O que torna um Cobot diferente de um robô convencional
O termo “colaborativo” refere-se à capacidade de segurança, não a uma classe mecânica distinta. Um cobot continua a ser um braço articulado de 6 eixos equipado com servomotores, caixas de velocidades e codificadores em cada junta. O que o diferencia é a detecção e o controle adicionais que permitem compartilhar um espaço de trabalho com segurança, combinados com um design que minimiza o risco de lesões:bordas arredondadas, baixa massa móvel, sem pontos de esmagamento e limites de velocidade.
Os robôs industriais tradicionais são construídos para oferecer velocidade, carga útil e repetibilidade dentro de uma célula protegida, assumindo que não há presença humana no envelope de trabalho. Os cobots trocam velocidade máxima e carga útil pela capacidade de operar em um espaço compartilhado, o que, por sua vez, altera a economia de implantação:uma célula cobot pode renunciar a cercas, cortinas de luz e o espaço superior que uma célula cercada exige. Esta poupança de custos é uma vantagem fundamental para os fabricantes de pequena e média dimensão. Para uma explicação estruturada dos tipos de cobot e critérios de seleção, consulte nosso guia completo sobre tipos, seleção e aplicações de cobot, que complementa este artigo com um mergulho mais profundo na mecânica de segurança.
De acordo com o relatório World Robotics 2025 da Federação Internacional de Robótica, os robôs colaborativos continuam a ser o segmento de crescimento mais rápido do mercado de robôs industriais em termos de taxa de crescimento unitário, embora ainda representem uma minoria do total de instalações. O crescimento está concentrado na montagem de produtos eletrônicos, no atendimento de máquinas e no empacotamento – áreas onde os pesos das peças são baixos e a proximidade homem-robô é operacionalmente útil.
Como funciona um Cobot:a mecânica de segurança
A principal tecnologia que permite aos cobots é como eles detectam e limitam a força de contato. Em 2026, predominam três abordagens e a maioria dos cobots de produção combina mais de uma.
Detecção de torque nas juntas
Cada junta contém um sensor de torque – ou o controlador infere o torque a partir da corrente do motor. Durante o movimento normal, o controlador conhece o perfil de torque esperado para o caminho programado na velocidade programada. Se o torque medido exceder um limite, o controlador o interpreta como uma força externa inesperada, aciona uma parada protetora e coloca o braço em uma posição segura. O tempo de reação desde o contato até a parada é da ordem de milissegundos, mantendo a força de contato abaixo dos limites de lesão.
Limitação de potência e força (PFL)
PFL é o método colaborativo mais comum. O robô foi projetado e configurado para que, mesmo no pior caso de contato, a força e a pressão transmitidas permaneçam abaixo dos limites biomecânicos definidos na ISO/TS 15066 Anexo A para a região corporal relevante. Isto é conseguido através da baixa massa móvel, dos limites de velocidade, da geometria arredondada e do batente com detecção de torque descrito acima. O PFL permite que muitos cobots funcionem sem cercas ou cortinas de luz porque o próprio robô atua como sistema de segurança.
Monitoramento de velocidade e separação
Como alternativa ou complemento, sensores de segurança externos – como scanners a laser, câmeras 3D ou tapetes de segurança – rastreiam a posição do operador. O robô funciona a toda velocidade quando não há ninguém por perto, diminui a velocidade quando uma pessoa se aproxima e para se a distância de separação protetora for violada. Isso permite que um robô mais rápido e mais pesado se comporte de forma colaborativa sem sacrificar a velocidade produtiva quando o espaço de trabalho está vazio.
Na prática, as implantações mais limpas combinam métodos:PFL como segurança básica, com monitoramento de velocidade e separação em camadas para recuperar a produtividade quando nenhum operador está presente. As observações da indústria a partir de implementações em linhas de montagem mostram que um cobot configurado exclusivamente para a velocidade PFL no pior caso pode perder 40% a 60% do seu rendimento potencial em comparação com o mesmo braço que pode funcionar rapidamente quando o espaço de trabalho está livre – portanto, as configurações híbridas são agora o padrão em linhas de maior volume.
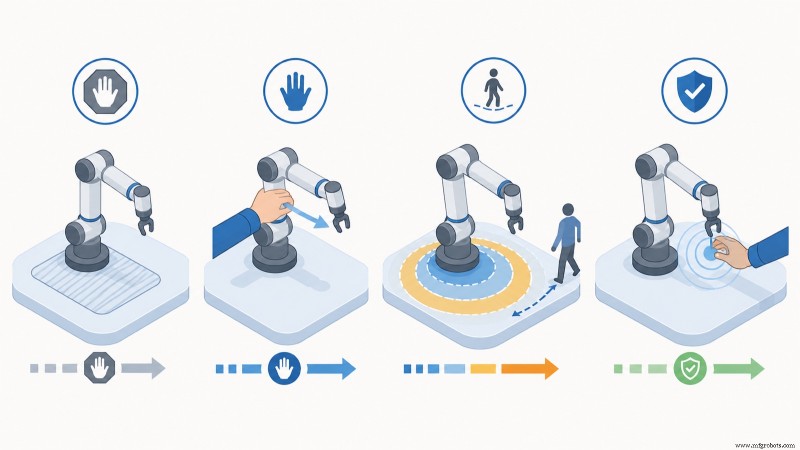
Os quatro modos de colaboração na ISO/TS 15066
A ISO/TS 15066:2016 complementa a ISO10218 para operação colaborativa e define quatro métodos de colaboração distintos. Um único aplicativo pode usar um ou combinar vários. Compreender qual modo um aplicativo precisa é o primeiro passo para especificar uma célula cobot segura.
| Modo de colaboração | Como funciona | Interação homem-robô | Aplicação típica |
|---|---|---|---|
| Parada monitorada com classificação de segurança | O robô para quando uma pessoa entra no espaço compartilhado; recomeça quando eles saem | Nenhum movimento enquanto o ser humano estiver presente na zona colaborativa | Carga/descarga manual de uma célula robótica, tarefas ocasionais de espaço compartilhado |
| Guia manual | O operador move fisicamente o braço usando um dispositivo de guia manual; robô obedece à força aplicada | Orientação física direta, movimento do robô conduzido pelo operador | Trilhas de ensino, elevação assistida, posicionamento de peças de baixo volume |
| Monitoramento de velocidade e separação | Escalas de velocidade do robô com distância do operador, medida por sensores de segurança | Coexistência com redução dinâmica de velocidade, ponto final na distância mínima | Células mistas onde humanos e robôs trabalham em proximidade alternada |
| Limitação de potência e força | Força de contato e pressão mantidas abaixo dos limites biomecânicos por projeto e controle | Contato direto permitido; robô para com força inesperada | Montagem de tarefas compartilhadas, atendimento de máquinas, embalagem próximo aos operadores |
A ISO/TS 15066 organiza os limites biomecânicos por região do corpo:os limites para a face e o crânio são muito mais rigorosos do que para o braço ou a mão, refletindo a gravidade da lesão potencial. Uma avaliação de risco correta mapeia as partes do caminho do robô onde o contato é possível até as regiões do corpo que poderiam ser contatadas e, em seguida, verifica se a força e a pressão permanecem abaixo do limite relevante. É por isso que um cobot que é “seguro” para uma aplicação não é automaticamente seguro para outra:alterar a ferramenta, a peça ou o layout altera os cenários de contacto.
Anatomia de um Cobot:Componentes e Especificações
A ficha de especificações de um cobot assemelha-se à de um pequeno robô industrial, com algumas adições específicas de colaboração. Os parâmetros que mais importam durante a seleção são:
- Carga útil — a massa máxima no flange da ferramenta, incluindo a pinça ou a ferramenta. As cargas úteis do cobot 2026 agrupam-se em 3, 5, 6, 10, 12, 16, 18, 20 e até a classe de 30 kg.
- Alcance — o raio do envelope de trabalho, normalmente de 500 mm a 1.800 mm. Alcance e carga útil são compensados dentro de uma família de produtos.
- Repetibilidade — a precisão com que o braço retorna a um ponto ensinado, geralmente de ±0,02 mm a ±0,1 mm, dependendo do tamanho. A repetibilidade mede a consistência, que é o que a maioria das tarefas de montagem e manutenção precisa.
- Graus de liberdade — seis é padrão para tarefas 3D gerais; os cobots de sete eixos acrescentam flexibilidade de alcance em espaços desordenados.
- Flange de ferramenta e E/S — a interface de montagem e as conexões elétricas/pneumáticas para pinças e sensores, geralmente direcionadas através do pulso.
- Funções com classificação de segurança — zonas de segurança configuráveis, limites de velocidade, limites de força e parada monitorada com classificação de segurança, todos certificados de acordo com os níveis de segurança funcional ISO10218-1 e IEC61508/62061.
A capacidade de colaboração reside principalmente no controlador e na detecção conjunta, e não em um único componente visível. É por isso que dois braços com carga útil e alcance idênticos podem diferir significativamente em segurança e velocidade:a diferença está no controlador de segurança, na resolução do sensor e no ajuste da detecção de colisão.
Onde os cobots são aplicados
Os cobots prosperam em aplicações onde os pesos das peças são modestos, a proximidade humana é útil e a flexibilidade para reimplantar o braço é mais importante do que o tempo de pico do ciclo. As famílias de aplicativos mais comuns em 2026 incluem:
Atendimento de máquinas
Carregamento e descarregamento de máquinas CNC, prensas de moldagem por injeção e dobradeiras. O cobot seleciona uma peça bruta, carrega a máquina, aguarda o ciclo e descarrega a peça acabada. Como o operador ainda pode aceder à máquina quando o cobot está parado, a célula permanece flexível. O atendimento de máquinas é a maior aplicação de cobot por base instalada.
Montagem e parafusamento
Tarefas repetitivas de fixação, inserção e montagem, muitas vezes acompanhadas por um ser humano que lida com etapas que exigem muito julgamento. Os cobots controlados por força são excelentes em tarefas de inserção (ajustes por pressão, encaixes por pressão), onde um perfil de força programado evita danos às peças.
Embalagem e Paletização
Embalagem de fim de linha e paletização leve. Os paletizadores Cobot manuseiam caixas até a carga útil do braço, construindo pilhas estáveis em um palete. Para casos mais pesados, a carga torna-se o fator limitante e um robô de paletização convencional assume o controle.
Inspeção de Qualidade e Automação de Laboratório
Cobots equipados com câmeras ou sensores realizam passagens de inspeção repetíveis e, em laboratórios, lidam com amostras, pipetas e manutenção de instrumentos. O layout sem cerca é adequado para ambientes onde pessoas e equipamentos compartilham bancadas estreitas.
Soldagem e Acabamento de Superfície
A soldagem Cobot cresceu rapidamente em oficinas, onde costuras curtas e baixos volumes não justificam uma célula de soldagem cercada. Os cobots também lidam com lixamento, polimento e rebarbação com controle de força. Para soldagem sustentada de alto volume em peças pesadas, um braço protegido de 6 eixos continua sendo a ferramenta certa, conforme abordado em nosso guia de robôs de soldagem para a indústria pesada.
Ambientes perigosos e extremos
Os cobots à prova de explosão ampliam a operação colaborativa em atmosferas com gases inflamáveis, como instalações químicas, de tintas e de energia. Eles exigem classificações de gabinete certificadas, em vez de gabinetes de cobot padrão. Consulte nosso guia dedicado a cobots à prova de explosão para ambientes perigosos para obter detalhes de certificação.
Cobot vs Robô Industrial:quando cada um vence
A escolha entre um cobot e um robô industrial convencional é uma decisão de aplicação, e não uma questão de qual tecnologia é mais avançada. A matriz abaixo enquadra o trade-off.
| Fator | Robô colaborativo | Robô industrial convencional |
|---|---|---|
| Carga útil | 3 a 30kg típico | 5 a mais de 800 kg |
| Velocidade | Limitado por segurança; mais rápido com monitoramento de separação | Alto, otimizado para tempo de ciclo |
| Proteção de segurança | Muitas vezes sem cerca após avaliação de risco | Cela cercada, cortinas de luz, intertravamentos |
| Espaço térreo | Compacto, sem pegada de proteção | Maior, inclui perímetro de segurança |
| Reimplementação | Rápido; o braço pode ser movido entre tarefas | Mais lento; a célula é semipermanente |
| Adequado para | Baixa carga útil, alta combinação, tarefas adjacentes a humanos | Alto volume, alta carga útil, ciclo sustentado |
Para uma estrutura de decisão completa, consulte a nossa análise complementar, cobot vs robô industrial:qual deve a sua fábrica escolher em 2026. Em suma, um cobot ganha quando a carga útil é baixa, o layout beneficia da partilha de espaço com as pessoas e a linha muda frequentemente; um robô convencional vence quando o volume e a carga útil são altos e a célula pode ser dedicada.
Implantando um Cobot com Segurança:A Avaliação de Riscos
Um equívoco comum é que um cobot está “seguro fora da caixa”. O braço é construído para ser colaborativo, mas a aplicação como um todo – o braço mais a ferramenta, a peça, o layout e a tarefa – deve ser avaliada e certificada. De acordo com a ISO10218-2 e a ISO/TS15066, o integrador (geralmente o usuário final) é responsável por uma avaliação de risco de toda a aplicação colaborativa.
- Identifique os perigos. Mapeie todos os pontos no caminho do robô onde o contato com uma pessoa é possível, além dos perigos da ferramenta (pinças afiadas, efetores de extremidade quente) e a peça que está sendo manuseada.
- Classifique o modo de colaboração. Decida qual dos quatro modos ISO/TS15066 a tarefa usa e para quais fases do ciclo.
- Verifique os limites biomecânicos. Para operação com limitação de potência e força, confirme se a força e a pressão de contato para cada contato possível permanecem abaixo do limite do Anexo A para aquela região do corpo, por cálculo ou por medição com um dispositivo de teste de força-pressão.
- Configurar funções de segurança. Defina limites de velocidade, força e zona no controlador de segurança e valide-os.
- Documente e valide. Registre a avaliação, valide a célula as-built em relação a ela e reavalie sempre que a ferramenta, a peça ou o layout mudarem.
Na prática, quando os engenheiros de aplicação do EVST comissionam uma célula colaborativa no local, a descoberta mais frequente durante a validação é que uma garra ou uma peça com arestas vivas cria uma pressão de contato acima do limite do Anexo A, mesmo que o próprio braço esteja dentro dos limites de força. A correção geralmente é um redesenho da garra, uma proteção de borda ou uma redução de velocidade no segmento do caminho afetado – e não um robô diferente. Esta é a etapa que os compradores mais frequentemente subestimam quando presumem que um cobot elimina a necessidade de engenharia de segurança.
Gama de Robôs Colaborativos da EVST
A EVST, com sede em Chengdu e fabricação em Wenling, enviou automação para mais de 100 países em sete anos. Sua linha de robôs colaborativos abrange cargas úteis de 3 kg até a classe de 30 kg, com modelos publicados incluindo um braço de 3 kg/620 mm, um braço de 6 kg/917 mm, um braço de 12 kg/1.300 mm e um braço de 18 kg/900 mm. A EVST também produz um robô colaborativo à prova de explosão para atmosferas perigosas e uma linha de cobots para serviços de catering, juntamente com seus robôs industriais convencionais QJAR, SCARA e famílias de produtos delta.
A linha de produção da EVST possui certificação de qualidade automotiva IATF16949 e seus produtos possuem certificações de terceiros CE, SGS e TUV. O cobot à prova de explosão está classificado para utilização em atmosferas inflamáveis, alargando a operação colaborativa a ambientes onde as caixas de cobot padrão não podem entrar. A empresa também detém uma patente de invenção concedida (CNZL202011601091.6), quatro patentes de invenção em exame substantivo e dois direitos autorais de software, apoiados por uma rede de engenharia de campo que abrange mais de 100 países para comissionamento no local e suporte de avaliação de risco.
Perguntas frequentes
O que é um robô colaborativo em termos simples?
Um robô colaborativo é um braço robótico construído para trabalhar com segurança próximo a pessoas sem cerca de segurança. Utiliza sensores de torque em suas juntas para detectar o contato e parar rapidamente, e é projetado com baixa massa, velocidade limitada e superfícies arredondadas para que qualquer contato permaneça abaixo dos limites de força e pressão que podem causar lesões, conforme definido na ISO/TS15066.
Os cobots realmente não precisam de uma cerca de segurança?
Frequentemente, mas não automaticamente. A necessidade de uma cerca depende da avaliação de risco da aplicação completa, do braço mais sua ferramenta, da peça e da tarefa. Muitas aplicações de baixa carga útil e baixa velocidade são executadas sem barreiras após a avaliação. Mas uma ferramenta afiada, uma peça pesada ou com arestas vivas ou um requisito de alta velocidade podem forçar proteção adicional ou monitoramento de velocidade e separação. O cobot permite um layout sem cercas; a avaliação de risco confirma se isso é permitido.
De que carga útil e alcance preciso para um cobot?
Adicione o peso da peça e o peso da pinça ao tamanho da carga útil e deixe uma margem de aproximadamente 20% a 30%. Para o atendimento de peças pequenas por máquinas, é comum um braço de 5kg a 10kg; para paletização ou movimentação mais pesada, 16kg a 30kg. O alcance deve abranger todo o envelope de trabalho da tarefa, normalmente de 600 mm a 1.300 mm para trabalhos de bancada e de manutenção de máquinas, e mais longo para paletização.
Qual é a diferença entre ISO10218 e ISO/TS15066?
ISO10218 (partes 1 e 2) é o principal padrão de segurança para robôs industriais e sua integração. A ISO/TS15066 é uma especificação técnica que a complementa especificamente para operação colaborativa, acrescentando os quatro modos de colaboração e os limites biomecânicos de força e pressão em seu Anexo A. Uma aplicação colaborativa deve satisfazer ambos. Para uma análise focada no comprador, consulte nosso guia sobre padrões de segurança de cobots no site do produto EVST.
Quão rápido um cobot pode se mover?
No modo limitado de potência e força, a velocidade do cobot é limitada para que o contacto no pior caso permaneça dentro dos limites biomecânicos, muitas vezes bem abaixo de um robô convencional. Com o monitoramento de velocidade e separação, o mesmo braço pode funcionar próximo ao seu máximo mecânico quando nenhum operador está na zona de proteção e, em seguida, desacelerar ou parar quando uma pessoa se aproxima. As configurações híbridas recuperam a maior parte do rendimento perdido, preservando a segurança colaborativa.
Onde ir a seguir
Para combinar um cobot específico com uma carga útil e um requisito de alcance com um caminho para uma cotação, consulte o guia do site do produto EVST para seleção de carga útil de robô colaborativo de 3kg a 30kg. Para obter os detalhes dos padrões de segurança que os compradores precisam antes de especificar uma célula sem cerca, consulte os padrões de segurança do cobot explicados aos compradores. Para uma decisão mais ampla de construção ou compra, leia cobot versus robô industrial e, para estimar os retornos, nossa calculadora de ROI cobot para fabricação de PMEs. Para questões de aquisição, as vendas da EVST podem ser contatadas através da página de contato.
Sobre o autor:A equipe editorial da EVST escreve sobre robótica industrial e manufatura inteligente para engenheiros e líderes de operações que avaliam projetos de automação. A EVST (EVSTECHCO.,LTD), fundada em Chengdu em 2018, já entregou mais de 600 projetos de automação e envia para mais de 100 países, com certificação de nível automotivo IATF16949 e certificações de terceiros CE/SGS/TUV nas famílias de produtos QJAR, robô colaborativo, SCARA e delta.
Cobot vs Robô Industrial:Qual escolher em 2026
IQ:Acelere a automação da paletização com verificação de ajuste habilitada por IA e implantação rápida
Robô industrial
- Como lubrificar seu robô industrial
- As vantagens dos robôs de remoção de material Fanuc
- Como dobrar chapas de metal com um robô
- Fabricação rápida e fácil com robótica
- Benefícios do uso da robótica industrial
- Manutenção de equipamentos de robôs
- Como a soldagem robótica cria produtividade para fabricantes de grandes peças de transporte
- Ferramenta de inspeção de qualidade Keyence Série LJ-V7000
- Centro de soluções virtuais:Como a simulação do robô ajuda na integração do robô?
- Fabricação importante em Elk Grove Village, Illinois