


Duas técnicas para linearizar pontes de sensores resistivos
Medir as mudanças minúsculas de resistência em sensores resistivos pode ser uma tarefa assustadora. Aqui estão dois métodos de hardware para eliminar erros de não linearidade de ponte.
A resistência de um sensor resistivo depende de uma variável física, como temperatura ou força. A variação percentual na resistência desses dispositivos geralmente é pequena. Por exemplo, a mudança total na resistência de um medidor de tensão pode ser inferior a 1% em toda a sua faixa operacional.
Discernir esses pequenos valores exige circuitos de medição altamente precisos. Os circuitos de ponte nos permitem realizar mais facilmente essas medições precisas. No entanto, a saída de um circuito de ponte pode ter uma relação não linear com a variável física medida, mesmo se estivermos usando um sensor linear.
Nestes casos, podemos usar técnicas de software ou hardware para eliminar os erros de não linearidade da ponte. Neste artigo, daremos uma olhada em duas técnicas diferentes de linearização de pontes de sensores resistivos.
Não linearidade de ponte de sensores resistivos
Considere um sensor de pressão resistiva com a seguinte resposta linear:
\ [R_ {sensor} =R_0 + Mx \]
onde R 0 é a resistência inicial do sensor à pressão zero, x é o valor do mensurando (pressão) e M é a inclinação da resposta do sensor. Para tornar nossas futuras equações mais simples, vamos assumir que o valor de M é igual ao valor da resistência inicial do sensor (R 0 ) e, portanto, a resposta do sensor é \ [R_0 (1 + x) \].
Normalmente, a mudança percentual na resistência de um sensor resistivo é pequena e precisamos empregar um circuito em ponte para realizar medições precisas com mais facilidade. Uma configuração de ponte comum para este sensor é ilustrada na Figura 1.
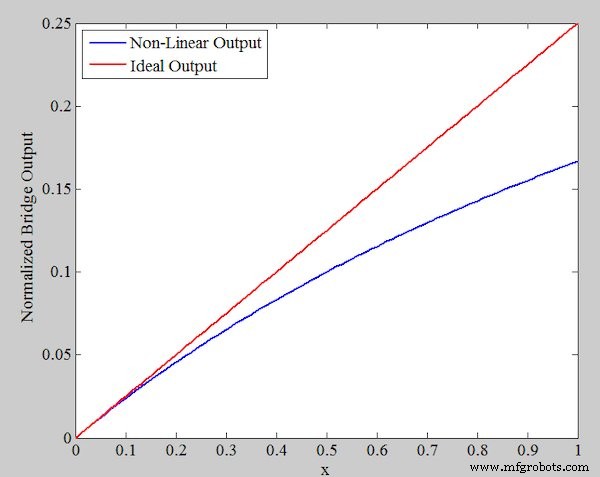
Figura 1. Configuração de ponte comum de um sensor resistivo
Observe que os outros três resistores da ponte têm uma resistência de R 0 . Esta escolha de resistores em ponte maximiza a sensibilidade da saída (V out ) a mudanças na resistência do sensor. A equação de saída pode ser obtida como:
\ [V_ {out} =V_A - V_B =V_r \ left (\ frac {R_0 (1 + x)} {R_0 + R_0 (1 + x)} - \ frac {1} {2} \ direita) \]
Isso simplifica para:
\ [V_ {out} =V_r \ left (\ frac {x} {2 (2 + x)} \ right) \]
Equação 1.
Como você pode ver, a relação entre a saída da ponte e a mudança no valor da resistência (x) não é linear. Com \ [x \ ll2 \], podemos aproximar a equação acima pela seguinte relação linear:
\ [V_ {out} \ approx V_r \ left (\ frac {x} {4} \ right) \]
Equação 2.
A Figura 2 descreve a saída normalizada da ponte \ [\ frac {V_ {out}} {V_r} \] para o caso real (Equação 1) e a saída ideal (Equação 2).
Figura 2. Saídas não lineares (azul) e ideais (vermelhas) das Equações 1 e 2
Como esperado, o desvio da resposta linear aumenta com x.
Quantos erros de não linearidade serão introduzidos?
Vamos quantificar o erro de não linearidade do circuito da ponte acima. Podemos reescrever a Equação 1 como:
\ [V_ {out} =V_r \ left (\ frac {x} {4} \ right) \ left (\ frac {1} {1+ \ frac {x} {2}} \ direita) \]
Supondo que \ [\ frac {x} {2} <<1 \], podemos usar o teorema de Taylor para obter uma aproximação da função acima como:
\ [V_ {out} =V_r \ left (\ frac {x} {4} \ right) \ left (1 - \ frac {x} {2} \ right) \]
Comparando este resultado com a Equação 2, podemos calcular a magnitude do erro como:
\ [E_ {Não linearidade} =V_r \ left (\ frac {x} {4} \ right) \ left (\ frac {x} {2} \ right) \]
Dividindo isso pelo valor ideal esperado dado pela Equação 2, podemos obter o erro de linearidade do ponto final percentual para uma dada mudança na resistência (x):
\ [Porcentagem ~ Erro =\ frac {x} {2} \ vezes 100 \% \]
Exemplo de cálculo do erro não linear
Considere um sensor com resposta \ [R_ {sensor} =R_0 (1 + x) \]. Suponha que \ [R_0 =100 ~ \ Omega \] e o valor máximo de x em toda a faixa operacional seja 0,01. A porcentagem máxima de erro de linearidade será:
\ [Porcentagem ~ Erro =\ left (\ frac {0,01} {2} \ right) \ times 100 \% =0,5 \% \]
Observe que, embora possamos usar um software para remover os erros de linearidade do sensor, é desejável ter uma resposta linear, pois aumenta a precisão da medição e facilita a calibração do sistema. Existem diferentes topologias de circuito que podem ser usadas para linearizar circuitos de ponte.
No restante deste artigo, examinaremos duas técnicas diferentes de linearização de ponte.
Método 1:Criação de uma tensão proporcional às mudanças de resistência (x)
A primeira técnica de linearização que discutiremos neste artigo é mostrada na Figura 3. Vamos primeiro examinar a ideia básica dessa técnica e, em seguida, ver como o circuito na Figura 3 implementa essa ideia.
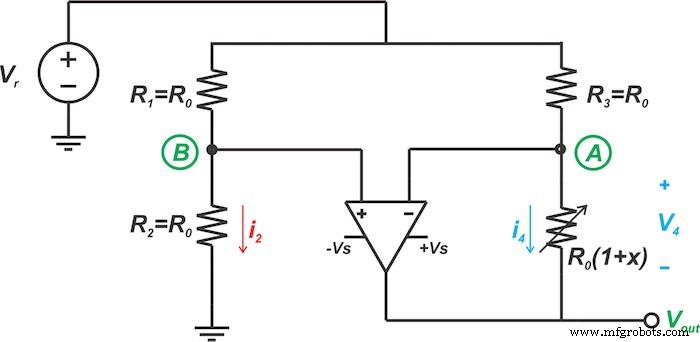
Figura 3. Um tipo de circuito para linearizar pontes de sensores resistivos
A Figura 4 mostra uma representação de uma corrente fixa de \ [I_ {Ref} \] forçado a fluir através de nosso sensor linear.
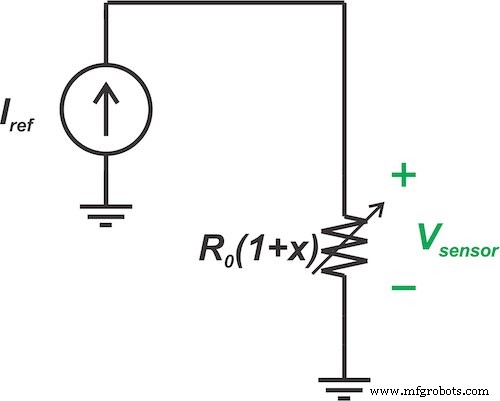
Figura 4. Uma corrente fixa (I Ref ) forçado através de um sensor linear
Neste cenário, a tensão resultante através do sensor seria:
\ [V_ {sensor} =I_ {Ref} \ times R_0 (1 + x) \]
que pode ser reorganizado como:
\ [V_ {sensor} =R_0 \ vezes I_ {Ref} + R_0 \ vezes I_ {Ref} \ vezes x \]
Enquanto o primeiro termo é um valor constante, o segundo termo é proporcional às mudanças na resistência do sensor (x). Se pudermos omitir o termo constante, teremos uma tensão que tem uma relação linear com x.
Implementação de Circuito
O circuito na Figura 3 usa a ideia acima para linearizar o circuito da ponte. Uma vez que as entradas do amplificador operacional idealmente não puxam nenhuma corrente, a tensão no nó B terá um valor constante de:
\ [v_B =\ frac {R_0} {R_0 + R_0} V_r =\ frac {V_r} {2} \]
O feedback negativo junto com o alto ganho do op-amp forçará as entradas inversora e não inversora do op-amp a ter a mesma tensão:
\ [v_A =v_B =\ frac {V_r} {2} \]
Uma vez que ambas as extremidades de R3 estão em potenciais constantes, uma corrente constante fluirá através dele. Em outras palavras, o op-amp faz com que R3 atue como uma fonte de corrente que força uma corrente constante de \ [\ frac {V_r} {2R_0} \] no sensor. Portanto, a tensão através do sensor será:
\ [V_4 =\ frac {V_r} {2R_0} \ times R_0 (1 + x) =\ frac {V_r} {2} + \ frac {V_r} {2} x \]
O primeiro termo é o valor constante que deve ser eliminado do V out equação. O segundo termo é proporcional às mudanças de resistência do sensor (x) e deve aparecer na equação de saída. Aplicando a lei de tensão de Kirchhoff, encontramos V out Como:
\ [V_ {out} =-V_4 + V_A =- \ left (\ frac {V_r} {2} + \ frac {V_r} {2} x \ right) + V_A \]
Portanto, precisamos apenas de V A para ser igual a \ [\ frac {V_r} {2} \]. Isso já está satisfeito, o que leva a:
\ [V_ {out} =- \ frac {V_r} {2} x \]
Portanto, a saída tem uma relação linear com x.
Método 2:Criação de uma corrente proporcional às mudanças de resistência (x)
A segunda técnica de linearização de ponte que discutiremos neste artigo é mostrada na Figura 5.
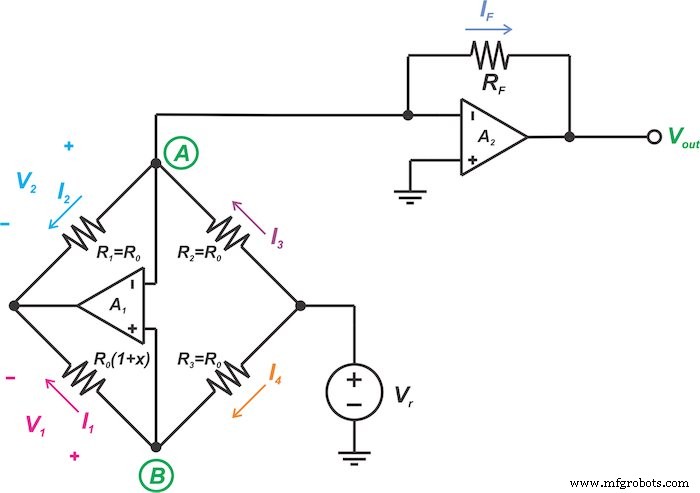
Figura 5. Outro circuito para a linearização analógica de pontes de sensores resistivos
Vamos novamente dar uma olhada na ideia básica desta técnica e, em seguida, examinar sua implementação de circuito.
Esta segunda técnica de linearização é ilustrada na Figura 6.
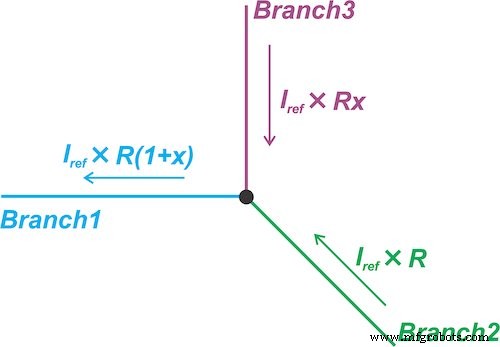
Figura 6. Técnica de linearização que força a corrente através de um ramo do circuito a ser proporcional à resistência do sensor
Ele força a corrente através de uma ramificação do circuito (Ramificação 1) a ser proporcional à resistência do sensor:
\ [I_1 =I_ {Ref} \ vezes R_0 (1 + x) \]
onde eu Ref é um valor constante. Em seguida, realiza a subtração do domínio atual para eliminar o termo constante \ [I_ {Ref} \ times R_0 \]. Para este fim, a corrente através da Ramificação 2 é definida como \ [I_ {Ref} \ times R_0 \]. Portanto, a corrente através do Branch 3 será \ [I_ {Ref} \ times R_0x \] - proporcional às mudanças na resistência do sensor (x).
Implementação de Circuito
Vamos ver como o circuito na Figura 5 implementa a ideia acima. Mais uma vez, o feedback negativo junto com o alto ganho dos amplificadores operacionais forçará as entradas inversora e não inversora dos dois amplificadores operacionais (ambos A 1 e A 2 ) para ter a mesma tensão:
\ [v_A =v_B =0 \]
Equação 3.
Portanto, temos V 1 =V 2 que leva a
\ [R_0 (1 + x) \ vezes I_1 =R_0 \ vezes I_2 \]
Isso simplifica para:
\ [I_2 =I_1 + I_1 \ vezes x \]
Equação 4.
Nós sabemos que eu 1 =I 4 e, levando em consideração a Equação 3, temos:
\ [I_1 =I_4 =\ frac {V_r - v_A} {R_0} =\ frac {V_r} {R_0} \]
Substituindo isso na Equação 4, obtemos:
\ [I_2 =\ frac {V_r} {R_0} + \ frac {V_r} {R_0} \ vezes x \]
Portanto, I 2 é a soma de um valor constante e um termo proporcional ax. Precisamos apenas usar a lei atual de Kirchhoff para eliminar o termo constante na equação da corrente de saída. A corrente através de R2 origina uma corrente igual a \ [\ frac {V_r} {R_0} \] para o nó A, levando a:
\ [I_F =- \ frac {V_r} {R_0} \ times x \]
Portanto, obtemos:
\ [V_ {out} =V_r \ times \ frac {R_F} {R_0} \ times x \]
O circuito da Figura 5 precisa de um amplificador operacional adicional em comparação com a primeira técnica. No entanto, com as duas soluções de amp op, podemos definir arbitrariamente o ganho escolhendo a razão \ [\ frac {R_F} {R_0} \].
Para ver uma lista completa dos meus artigos, visite esta página.
Sensor
- Como as pontes são usadas na impressão 3D
- Ponte de Tração
- “Pele eletrônica” bimodal
- Sensor de pressão vestível de metal líquido
- Sensor de radiação de microondas de alta sensibilidade
- Filme Sensor para Aeroespacial
- Sensor de pulmão-coração em miniatura em um chip
- Sensor de dióxido de carbono de estado sólido
- Sensor de qualidade do ar à base de carbono
- Microsensores de fluxo ultra-sensíveis