


Pesquisadores desenvolvem dedos robóticos para agarrar e soltar objetos em condições secas e úmidas
Uma equipe de pesquisadores da Universidade de Kanazawa desenvolveu um sistema de controle de robô – ou ponta dos dedos – para agarrar e soltar objetos em condições secas e molhadas.
Os pesquisadores dizem que o estudo foi capaz de verificar que “a preensão de objetos pelas pontas dos dedos fluidos de superfície macia com alto atrito era controlável pela aplicação de um lubrificante adequado”.
No entanto, eles acrescentaram que era necessário fazer mais experimentos sob várias condições para aplicar a tecnologia de controle atual aos ambientes de fabricação.
No entanto, espera-se que este estudo seja um passo à frente para realizar a automação do trabalho de, por exemplo, agarrar e soltar objetos em um espaço estreito.
Robôs industriais são agora amplamente utilizados e indispensáveis na fabricação de automóveis e em outros campos. As mãos robóticas convencionais são adequadas para agarrar objetos duros de forma fixa, enquanto não é fácil agarrar objetos complicados ou agarrar delicadamente objetos macios.
Também é necessário, sob várias condições, responder às características físicas dos objetos, como características da superfície:seca, molhada, etc.
A ponta do dedo de superfície macia de uma mão robótica é deformável e pode agarrar um objeto de forma complicada com bastante facilidade, uma vez que a área de contato pode ser aumentada pela deformação da superfície em resposta à forma do objeto.
As pontas dos dedos de superfície macia são muito eficazes para agarrar objetos macios; até mesmo o tofu pode ser agarrado.
Geralmente, no entanto, o atrito superficial do material macio é alto, o que dificulta a liberação. Também é difícil liberar objetos para as posições desejadas, especialmente nos casos em que o espaço de trabalho é estreito.
O grupo de pesquisa foi liderado pelo professor Tetsuyou Watanabe da Universidade de Kanazawa e vem realizando pesquisas sobre tecnologia de controle para agarrar objetos pelas pontas dos dedos das mãos dos robôs.
No presente estudo, o grupo teve como objetivo desenvolver um sistema de controle de atrito.
O grupo usou a ponta dos dedos macios de uma mão robótica para agarrar objetos; a liberação foi realizada aplicando (injetando) um lubrificante.
Neste estudo, o etanol absoluto (>99,5%) foi empregado como lubrificante, uma vez que o etanol é quimicamente seguro e fácil de secar e sua tensão superficial é baixa.
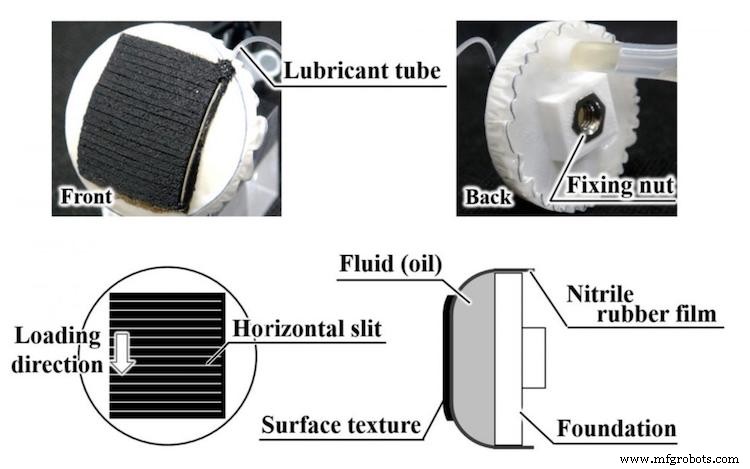
Como visto na Figura 1, um filme de borracha nitrílica foi colado nas laterais da base da ponta do dedo para criar um espaço para preenchimento com óleo de motosserra para fazer uma “ponta de dedo fluida”.
Em seguida, uma “textura” de silicone foi colada para revestir o filme de borracha; o material da “textura” foi um selante de silicone com fendas, cujo intervalo foi de 1,5 mm, perpendicular à direção da carga.
As fendas foram introduzidas para uma grande fricção sob uma condição úmida e para o espalhamento do lubrificante.
Com essa ponta de dedo fluida, foram apreendidos objetos de diversos materiais utilizados para utensílios de cozinha e verificou-se que, ao aplicar o lubrificante, o atrito foi de fato reduzido.
O atrito foi reduzido tanto em condições secas quanto úmidas, enquanto tal efeito lubrificante não foi observado em condições oleosas.
Em seguida, foi realizada uma simulação da tarefa de embalagem da caixa. Uma caixa de papel foi agarrada com duas pontas de dedos fluidas de ambos os lados.
A “textura” descrita acima foi colada a cada ponta de dedo fluida. A preensão estável foi confirmada colocando um peso na caixa de papel.
Após a retirada do peso, o lubrificante foi injetado em ambas as pontas dos dedos do fluido, o que causou um deslizamento da caixa de papel para baixo em um tempo bastante curto (menos de 2,5 s), de modo que a tarefa de embalagem da caixa de papel foi concluída.
Como mostrado aqui, uma “textura” de alto atrito foi colada na ponta do dedo do fluido e a injeção de um lubrificante (aqui, etanol absoluto) reduziu o atrito.
Portanto, a liberação e colocação de um objeto na posição desejada era realizada controlando o atrito sem mover as pontas dos dedos.
Os 13 melhores dispositivos e sistemas domésticos inteligentes de 2019
Columbia desenvolve 'assistência robótica de suporte de tronco' para pessoas com lesões na medula espinhal
Sistema de controle de automação
- Projetando um painel de controle para uma traineira de pesca
- Garras de injeção de combustível personalizadas para impressão em 3D para um robô de seleção e colocação
- Essentium e Lehvoss fazem parceria para desenvolver materiais para fabricação de aditivos
- DSM e Nedcam desenvolvem novos aplicativos para impressão 3D de tamanho grande
- Sepro lança aplicativos para aprimorar o software do robô
- Automação para IML e moldes de pilha
- Robô ‘Artístico’ na NPE
- 3 Vantagens da Simulação de Robôs para Fabricantes e Outros Usuários de Robôs
- As notícias sobre robótica e automação são boas para a ABB, diz CEO
- Fanuc e Plus One Robotics desenvolvem soluções de automação para atendimento de comércio eletrônico