


Circuitos Computacionais
Quando alguém menciona a palavra “computador”, geralmente um dispositivo digital é o que vem à mente. Os circuitos digitais representam grandezas numéricas em binário formato:padrões de 1 e 0 representados por uma infinidade de circuitos de transistor operando em estados saturados ou de corte. No entanto, os circuitos analógicos também podem ser usados para representar grandezas numéricas e realizar cálculos matemáticos, usando sinais de tensão variável em vez de estados liga / desliga discretos.
Aqui está um exemplo simples de representação binária (digital) versus representação analógica do número "vinte e cinco:"
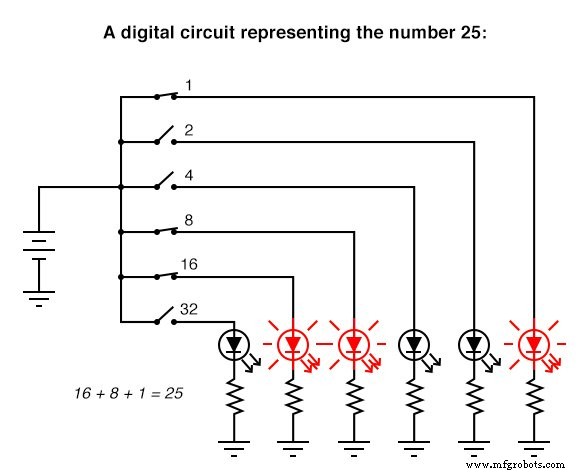
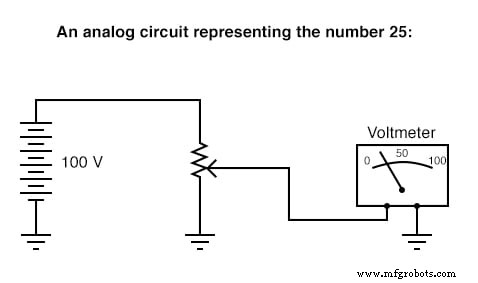
Os circuitos digitais são muito diferentes dos circuitos construídos com base em princípios analógicos. Os circuitos computacionais digitais podem ser incrivelmente complexos, e os cálculos muitas vezes devem ser realizados em “etapas” sequenciais para obter uma resposta final, da mesma forma que um ser humano faria cálculos aritméticos em etapas com lápis e papel. Os circuitos computacionais analógicos, por outro lado, são bastante simples em comparação e executam seus cálculos de maneira contínua e em tempo real. Porém, há uma desvantagem em usar circuitos analógicos para representar números:imprecisão. O circuito digital mostrado acima está representando o número vinte e cinco, precisamente. O circuito analógico mostrado acima pode ou não ser exatamente calibrado para 25.000 volts, mas está sujeito a “desvios” e erros.
Em aplicações onde a precisão não é crítica, os circuitos computacionais analógicos são muito práticos e elegantes. Aqui estão alguns circuitos op-amp para realizar computação analógica:
Circuitos amplificadores operacionais computacionais
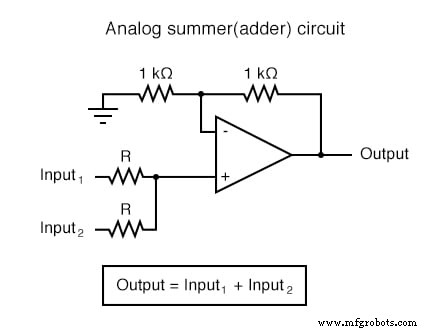
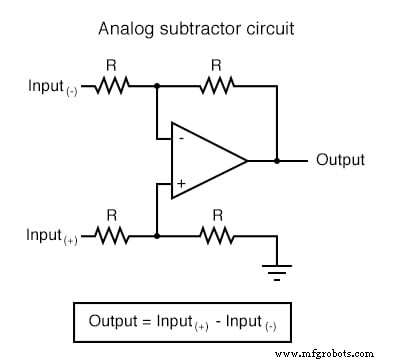
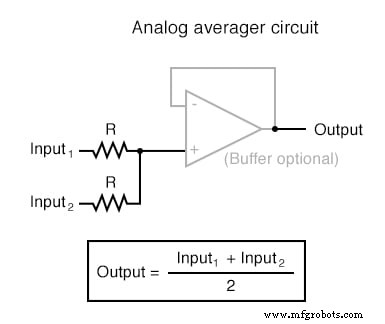
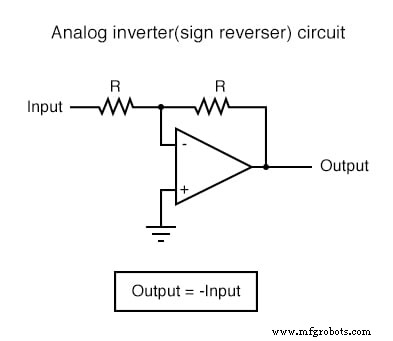
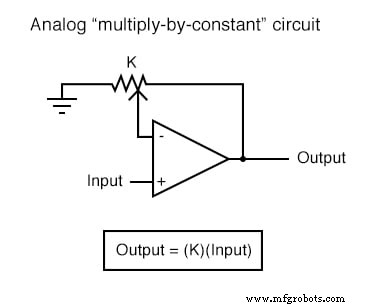
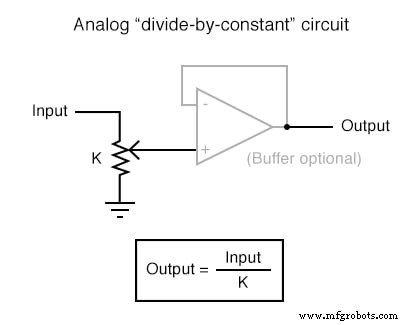
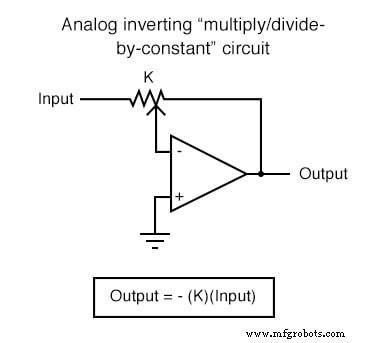
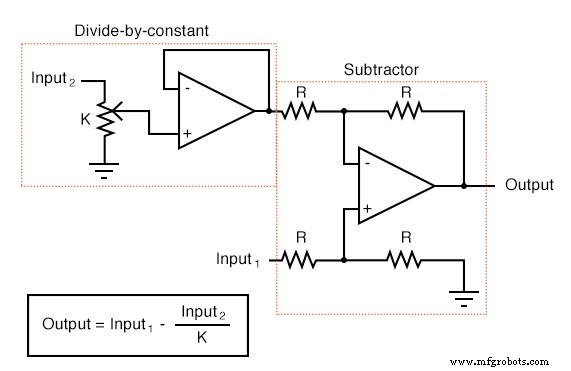
Cada um desses circuitos pode ser usado de forma modular para criar um circuito capaz de cálculos múltiplos. Por exemplo, suponha que precisemos subtrair uma certa fração de uma variável de outra variável. Ao combinar um circuito divisão por constante com um circuito subtrator, podemos obter a função necessária:
Dispositivos chamados computadores analógicos costumava ser comum em universidades e oficinas de engenharia, onde dezenas de circuitos de amp op podiam ser "remendados" junto com fios de jumper removíveis para modelar declarações matemáticas, geralmente com o propósito de simular algum processo físico cujas equações subjacentes eram conhecidas. Os computadores digitais tornaram os computadores analógicos praticamente obsoletos, mas o circuito computacional analógico não pode ser derrotado pelo digital em termos de elegância e economia de componentes necessários.
O circuito computacional analógico se destaca na execução de operações de cálculo integração e diferenciação com respeito ao tempo, usando capacitores em um loop de feedback do amplificador operacional. Para compreender totalmente a operação e as aplicações desses circuitos, no entanto, devemos primeiro entender o significado desses conceitos fundamentais de cálculo. Felizmente, a aplicação de circuitos amplificadores operacionais a problemas do mundo real envolvendo cálculo serve como um meio excelente para ensinar cálculo básico. Nas palavras de John I. Smith, extraídas de seu excelente livro, Modern Operational Circuit Design :
“Uma nota de encorajamento é oferecida a certos leitores:cálculo integral é uma das disciplinas matemáticas que o circuito operacional [amplificador] explora e, no processo, em vez disso, destrói como uma barreira para a compreensão.” (pág. 4)
Os sentimentos do Sr. Smith sobre o valor pedagógico dos circuitos analógicos como uma ferramenta de aprendizagem para a matemática não são únicos. Considere a opinião do engenheiro George Fox Lang, em um artigo que ele escreveu para a edição de agosto de 2000 da revista Sound and Vibration , intitulado “Analog was not uma marca registrada de computador! ”:
“Criar uma entidade física real (um circuito) governada por um conjunto particular de equações e interagir com ela fornece uma visão única dessas declarações matemáticas. Não há melhor maneira de desenvolver uma “intuição” para a interação entre a física e a matemática do que experimentar tal interação. O computador analógico era uma ferramenta poderosa de ensino interdisciplinar; sua obsolescência é lamentada por muitos educadores em diversos campos. ” (pág. 23)
A diferenciação é a primeira operação tipicamente aprendida por alunos iniciantes de cálculo. Simplificando, a diferenciação é determinar a taxa instantânea de mudança de uma variável em relação a outra. Em circuitos diferenciadores analógicos, a variável independente é o tempo e, portanto, as taxas de mudança com as quais estamos lidando são taxas de mudança para um sinal eletrônico (tensão ou corrente) em relação ao tempo.
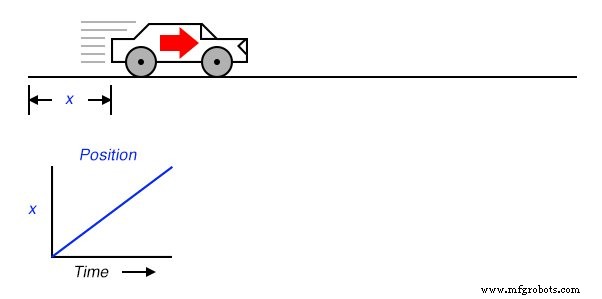
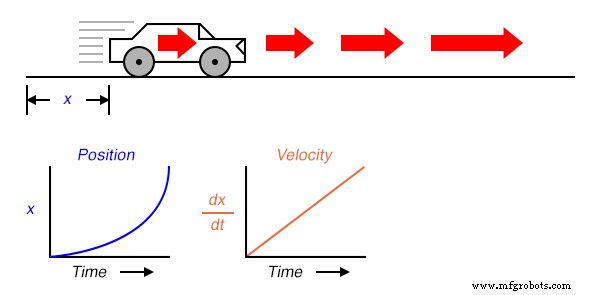
Suponha que medíssemos a posição de um carro, viajando em um caminho direto (sem curvas), a partir de seu ponto de partida. Vamos chamar essa medida de x . Se o carro se move a uma taxa tal que sua distância da "partida" aumenta continuamente ao longo do tempo, sua posição será plotada em um gráfico como um linear função (linha reta):
Se tivéssemos que calcular a derivada da posição do carro em relação ao tempo (isto é, determinar a taxa de variação da posição do carro em relação ao tempo), chegaríamos a uma quantidade que representa a velocidade do carro. A função de diferenciação é representada pela notação fracionária d / d , então, ao diferenciar a posição ( x ) com respeito ao tempo ( t ), denotamos o resultado (a derivada) como dx / dt :
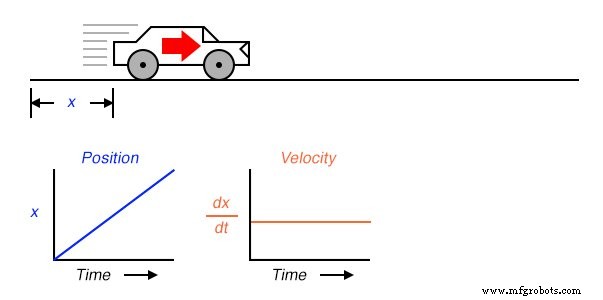
Para um gráfico linear de x ao longo do tempo, a derivada da posição ( dx / dt ), caso contrário e mais comumente conhecido como velocidade , será uma linha plana, de valor inalterado. A derivada de uma função matemática pode ser compreendida graficamente como sua inclinação quando plotado em um gráfico, e aqui podemos ver que a posição ( x ) gráfico tem uma inclinação constante, o que significa que sua derivada ( dx / dt ) deve ser constante ao longo do tempo.
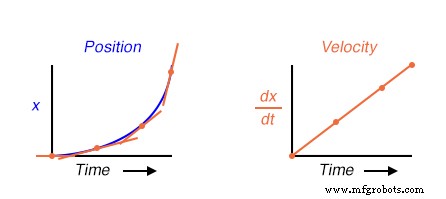
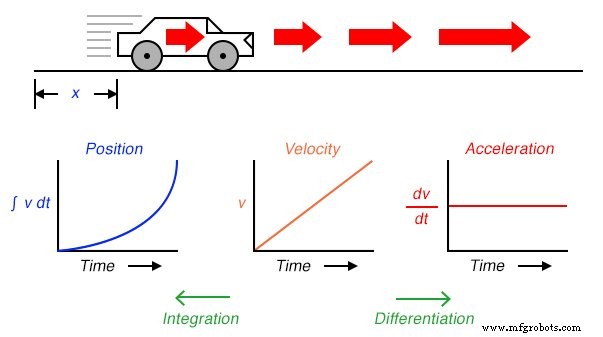
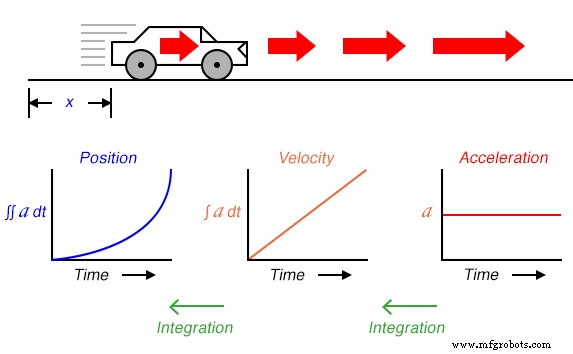
Agora, suponha que a distância percorrida pelo carro aumente exponencialmente com o tempo:isto é, ele começou sua viagem em movimentos lentos, mas percorreu uma distância adicional a cada período de tempo que passava. Veríamos então que a derivada da posição ( dx / dt ), também conhecido como velocidade ( v ), não seria constante ao longo do tempo, mas aumentaria:
A altura dos pontos no gráfico de velocidade corresponde às taxas de mudança, ou inclinação, dos pontos em tempos correspondentes no gráfico de posição:
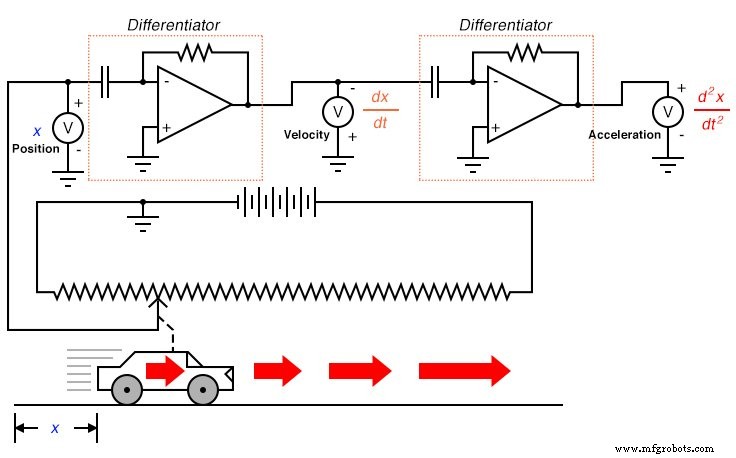
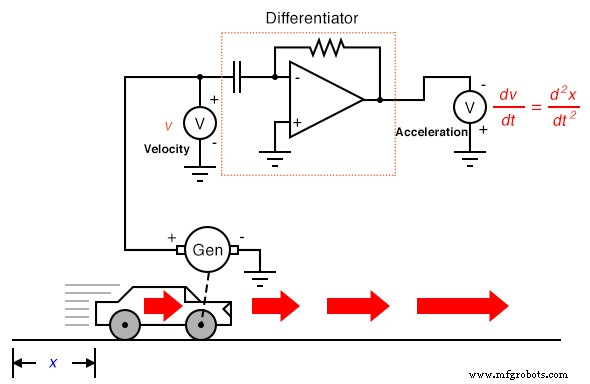
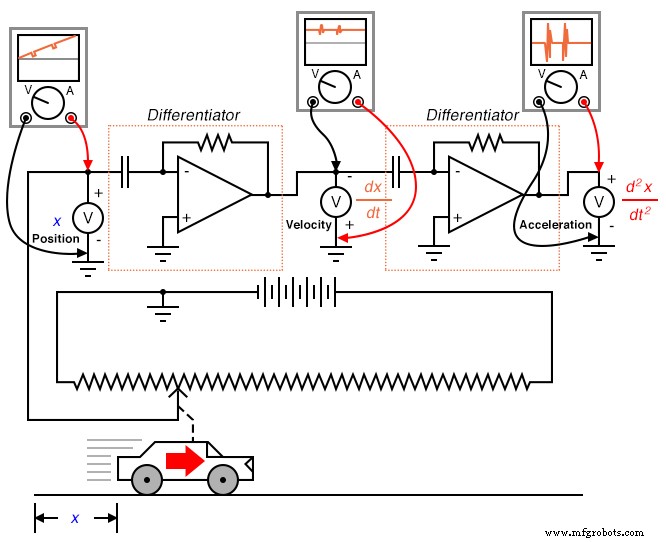
O que isso tem a ver com circuitos eletrônicos analógicos? Bem, se tivéssemos que ter um sinal de voltagem analógico representando a posição do carro (pense em um enorme potenciômetro cujo limpador estava conectado ao carro, gerando uma voltagem proporcional à posição do carro), poderíamos conectar um circuito diferenciador a este sinal e ter o circuito continuamente calcula a velocidade do carro, exibindo o resultado por meio de um voltímetro conectado à saída do circuito diferenciador:
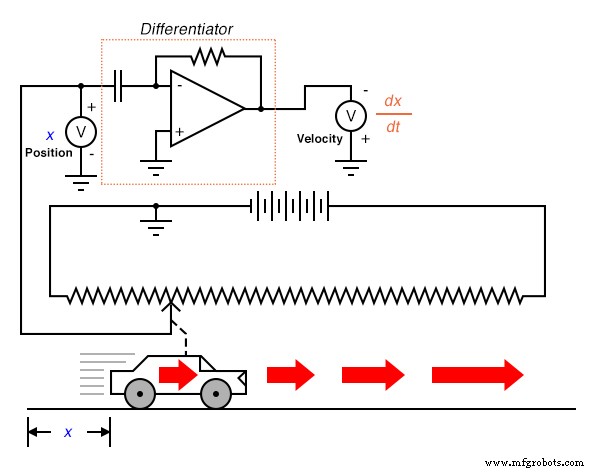
Lembre-se do último capítulo que um circuito diferenciador emite uma tensão proporcional à taxa de variação ao longo do tempo da tensão de entrada ( d / dt ) Assim, se a tensão de entrada está mudando ao longo do tempo a uma taxa constante , a tensão de saída terá um valor constante. Se o carro se move de tal maneira que a distância decorrida ao longo do tempo aumenta a uma taxa constante, isso significa que o carro está viajando a uma velocidade constante e o circuito diferenciador produzirá uma tensão constante proporcional a essa velocidade. Se a distância percorrida do carro ao longo do tempo muda de uma maneira não estável, a saída do circuito diferenciador também não será estável, mas sempre em um nível representativo da taxa de mudança da entrada ao longo do tempo.
Observe que a velocidade de registro do voltímetro (na saída do circuito diferenciador) está conectada em polaridade “reversa” à saída do amplificador operacional. Isso ocorre porque o circuito diferenciador mostrado está invertido :produzindo uma tensão negativa para uma taxa de variação de tensão de entrada positiva. Se desejarmos que o voltímetro registre um valor positivo para a velocidade, ele deverá ser conectado ao amplificador operacional conforme mostrado. Por mais impraticável que seja conectar um potenciômetro gigante a um objeto em movimento, como um automóvel, o conceito deve ser claro:realizando eletronicamente a função de cálculo da diferenciação em um sinal que representa a posição, obtemos um sinal que representa a velocidade.
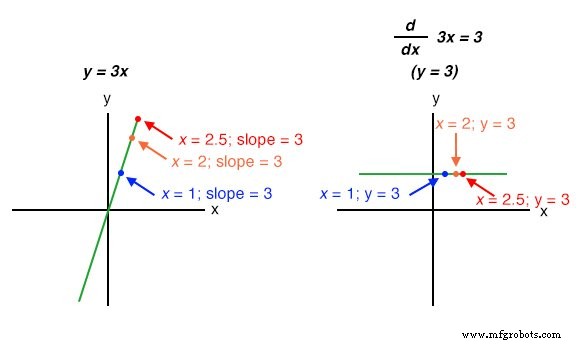
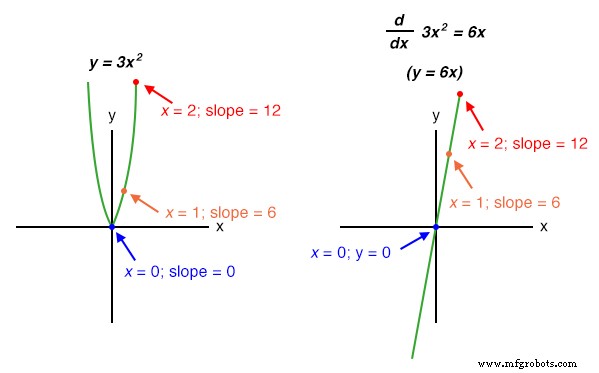
Alunos iniciantes em cálculo aprendem técnicas simbólicas de diferenciação. No entanto, isso requer que a equação que descreve o gráfico original seja conhecida. Por exemplo, alunos de cálculo aprendem como realizar uma função como y =3x e encontre sua derivada em relação a x ( d / dx ), 3 , simplesmente manipulando a equação. Podemos verificar a precisão dessa manipulação comparando os gráficos das duas funções:
Funções não lineares, como y =3x 2 também pode ser diferenciado por meios simbólicos. Neste caso, a derivada de y =3x 2 com respeito a x é 6x :
Na vida real, porém, muitas vezes não podemos descrever o comportamento de qualquer evento físico por uma equação simples como y =3x , e assim a diferenciação simbólica do tipo aprendido pelos alunos de cálculo pode ser impossível de aplicar a uma medição física. Se alguém deseja determinar a derivada da posição do nosso carro hipotético ( dx / dt =velocidade) por meios simbólicos, eles primeiro teriam que obter uma equação descrevendo a posição do carro ao longo do tempo, com base em medições de posição tomadas a partir de um experimento real - uma tarefa quase impossível, a menos que o carro seja operado sob condições cuidadosamente controladas levando a um processo muito simples gráfico de posição. No entanto, um circuito diferenciador analógico, explorando o comportamento de um capacitor em relação à tensão, corrente e tempo i =C (dv / dt) , naturalmente diferencia qualquer sinal real em relação ao tempo, e seria capaz de emitir um sinal correspondente à velocidade instantânea ( dx / dt ) a qualquer momento. Ao registrar o sinal de posição do carro junto com o sinal de saída do diferenciador usando um gravador de gráfico ou outro dispositivo de aquisição de dados, ambos os gráficos se apresentariam naturalmente para inspeção e análise.
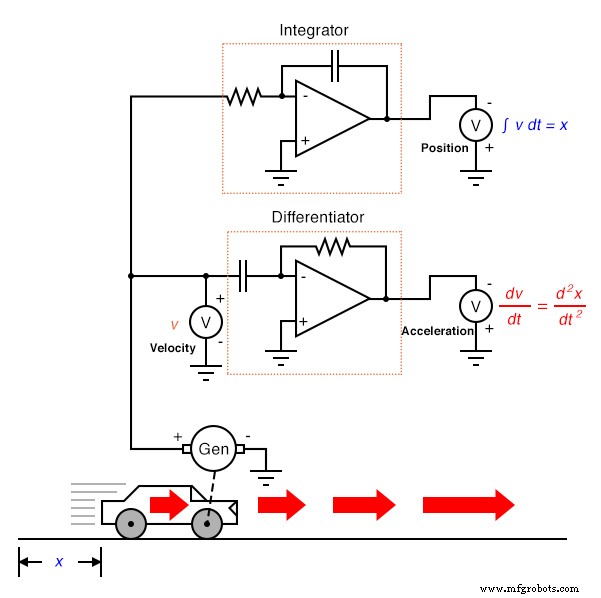
Podemos levar o princípio da diferenciação um passo adiante, aplicando-o ao sinal de velocidade usando outro circuito diferenciador. Em outras palavras, use-o para calcular a taxa de variação da velocidade, que sabemos ser a taxa de variação da posição. A que medida prática chegaríamos se fizéssemos isso? Pense nisso em termos das unidades que usamos para medir a posição e a velocidade. Se fôssemos medir a posição do carro a partir de seu ponto de partida em milhas, então provavelmente expressaríamos sua velocidade em unidades de milhas por hora ( dx / dt ) Se fossemos diferenciar a velocidade (medida em milhas por hora) em relação ao tempo, acabaríamos com uma unidade de milhas por hora por hora . Aulas introdutórias de física ensinam os alunos sobre o comportamento de objetos em queda, medindo a posição em metros , velocidade em metros por segundo , e mudança na velocidade ao longo do tempo em metros por segundo, por segundo . Esta medida final é chamada de aceleração :a taxa de variação da velocidade ao longo do tempo:
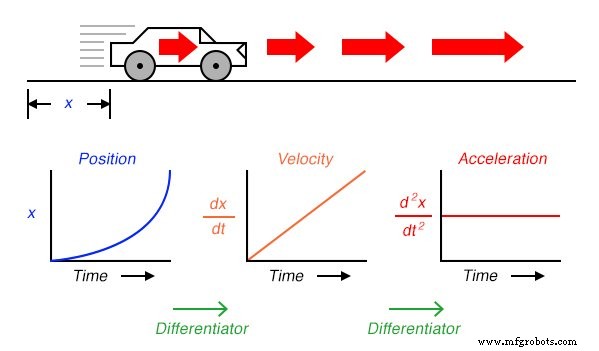
A expressão d 2 x / dt 2 é chamada de segunda derivada de posição ( x ) em relação ao tempo ( t ) Se conectássemos um segundo circuito diferenciador à saída do primeiro, o último voltímetro registraria a aceleração:
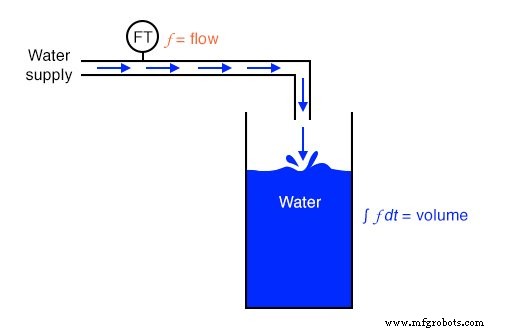
Derivando a velocidade da posição e a aceleração da velocidade, vemos o princípio da diferenciação muito claramente ilustrado. Essas não são as únicas medidas físicas relacionadas entre si dessa maneira, mas são, talvez, as mais comuns. Outro exemplo de cálculo em ação é a relação entre o fluxo de líquido ( q ) e volume de líquido ( v ) acumulado em uma embarcação ao longo do tempo:
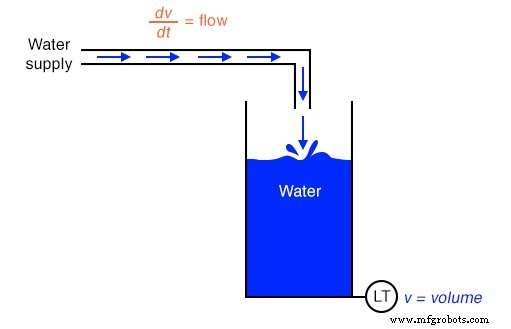
Um dispositivo “Transmissor de Nível” montado em um tanque de armazenamento de água fornece um sinal diretamente proporcional ao nível de água no tanque, que - se o tanque tiver uma área transversal constante ao longo de sua altura - equivale diretamente ao volume de água armazenado. Se tivéssemos que pegar este sinal de volume e diferenciá-lo em relação ao tempo ( dv / dt ), obteríamos um sinal proporcional à taxa de fluxo da água através do tubo levando água para o tanque. Um circuito diferenciador conectado de forma a receber este sinal de volume produziria um sinal de saída proporcional à vazão, possivelmente substituindo um dispositivo de medição de vazão (“Transmissor de Vazão”) instalado na tubulação.
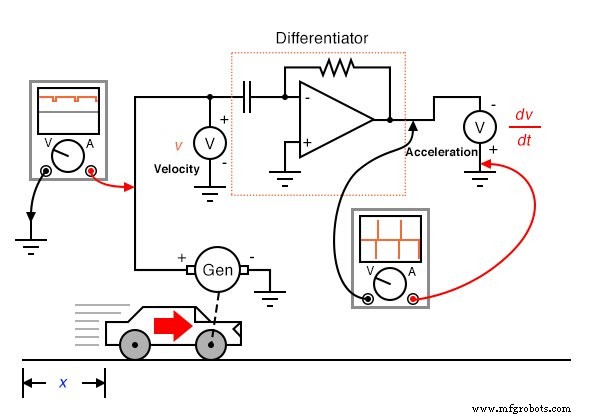
Voltando ao experimento do carro, suponha que nosso carro hipotético fosse equipado com um tacogerador em uma das rodas, produzindo um sinal de tensão diretamente proporcional à velocidade. Poderíamos diferenciar o sinal para obter aceleração com um circuito, assim:
Por sua própria natureza, o tacogerador diferencia a posição do carro em relação ao tempo, gerando uma tensão proporcional à rapidez com que a posição angular da roda muda ao longo do tempo. Isso nos fornece um sinal bruto já representativo da velocidade, com apenas uma única etapa de diferenciação necessária para obter um sinal de aceleração. Um tacogerador medindo velocidade, é claro, é um exemplo muito mais prático de instrumentação automotiva do que um potenciômetro gigante medindo sua posição física, mas o que ganhamos em praticidade, perdemos na medição de posição. Não importa quantas vezes façamos diferença, nunca podemos inferir a posição do carro a partir de um sinal de velocidade. Se o processo de diferenciação nos levou de posição para velocidade e aceleração, então, de alguma forma, precisamos realizar o processo “reverso” de diferenciação para ir da velocidade para a posição. Esse processo matemático existe e é chamado de integração . O circuito "integrador" pode ser usado para realizar esta função de integração com respeito ao tempo:
Lembre-se do último capítulo que um circuito integrador emite uma tensão cuja taxa de mudança ao longo do tempo é proporcional à magnitude da tensão de entrada. Assim, dada uma tensão de entrada constante, a tensão de saída irá mudar a uma taxa constante . Se o carro viaja a uma velocidade constante (entrada de voltagem constante para o circuito integrador do tacogerador), então sua distância percorrida aumentará continuamente conforme o tempo passa, e o integrador emitirá uma voltagem em constante mudança proporcional a essa distância. Se a velocidade do carro não for constante, então nem a taxa de mudança ao longo do tempo será da saída do circuito integrador, mas a tensão de saída será representam fielmente a distância percorrida pelo carro em um determinado momento.
O símbolo para integração se parece com uma letra cursiva “S” (∫) muito estreita. A equação que utiliza este símbolo (∫ v dt =x ) nos diz que estamos integrando velocidade ( v ) em relação ao tempo ( dt ) e obter a posição ( x ) como resultado.
Portanto, podemos expressar três medidas do movimento do carro (posição, velocidade e aceleração) em termos de velocidade ( v ) tão facilmente quanto poderíamos em termos de posição ( x ):
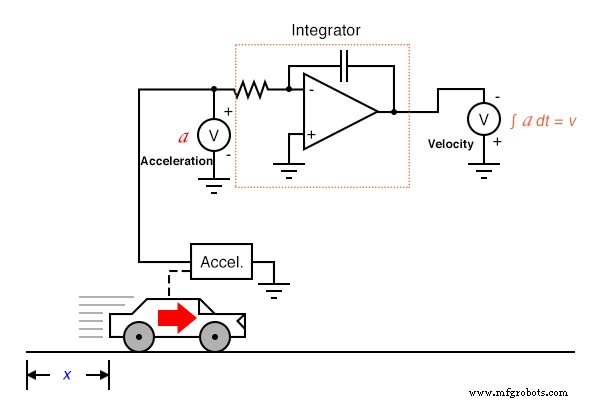
Se tivéssemos um acelerômetro acoplado ao carro, gerando um sinal proporcional à taxa de aceleração ou desaceleração, poderíamos (hipoteticamente) obter um sinal de velocidade com uma etapa de integração e um sinal de posição com uma segunda etapa de integração:
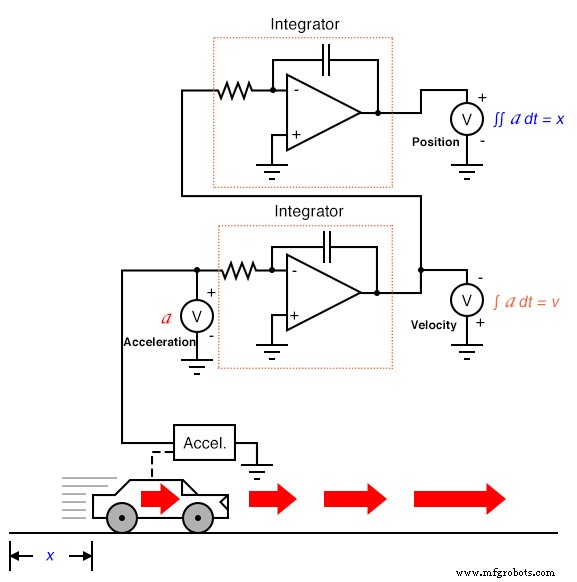
Assim, todas as três medidas do movimento do carro (posição, velocidade e aceleração) podem ser expressas em termos de aceleração:
Como você deve ter suspeitado, o processo de integração também pode ser ilustrado e aplicado a outros sistemas físicos. Considere, por exemplo, o tanque de armazenamento de água e o exemplo de fluxo mostrado anteriormente. Se a taxa de fluxo for derivada do volume do tanque em relação ao tempo ( q =dv / dt ), então também podemos dizer que o volume é a integral da taxa de fluxo em relação ao tempo:
Se fôssemos usar um dispositivo “transmissor de fluxo” para medir o fluxo de água, então, por integração de tempo, poderíamos calcular o volume de água acumulado no tanque ao longo do tempo. Embora seja teoricamente possível usar um circuito integrador de amplificador operacional capacitivo para derivar um sinal de volume de um sinal de fluxo, dispositivos "integradores" eletrônicos digitais e mecânicos são mais adequados para integração por longos períodos de tempo e encontram uso frequente na água indústrias de tratamento e distribuição.
Assim como existem técnicas simbólicas de diferenciação, também existem técnicas simbólicas de integração, embora tendam a ser mais complexas e variadas. A aplicação de integração simbólica a um problema do mundo real, como a aceleração de um carro, no entanto, ainda depende da disponibilidade de uma equação que descreve com precisão o sinal medido - muitas vezes uma coisa difícil ou impossível de derivar de dados medidos. No entanto, os circuitos integradores eletrônicos executam esta função matemática continuamente, em tempo real e para qualquer perfil de sinal de entrada, fornecendo assim uma ferramenta poderosa para cientistas e engenheiros.
Dito isso, há ressalvas ao uso de técnicas de cálculo para derivar um tipo de medição de outro. A diferenciação tem a tendência indesejável de amplificar o “ruído” encontrado na variável medida, uma vez que o ruído normalmente aparecerá como frequências muito mais altas do que a variável medida, e as frequências altas por sua própria natureza possuem altas taxas de mudança ao longo do tempo.
Para ilustrar esse problema, suponha que estejamos derivando uma medida da aceleração do carro a partir do sinal de velocidade obtido de um tacogerador com escovas ou barras do comutador gastas. Pontos de contato deficiente entre a escova e o comutador produzirão "quedas" momentâneas na tensão de saída do tacogerador e o circuito diferenciador conectado a ele interpretará essas quedas como mudanças muito rápidas na velocidade. Para um carro se movendo em velocidade constante - nem acelerando nem desacelerando - o sinal de aceleração deve ser 0 volts, mas o "ruído" no sinal de velocidade causado por um tacogerador com defeito fará com que o sinal diferenciado (aceleração) contenha "picos", indicando falsamente breves períodos de alta aceleração e desaceleração:
A tensão de ruído presente em um sinal a ser diferenciado não precisa ser de amplitude significativa para causar problemas:tudo o que é necessário é que o perfil de ruído tenha tempos de subida ou queda rápidos. Em outras palavras, qualquer ruído elétrico com um alto dv / dt componente será problemático quando diferenciado, mesmo que seja de baixa amplitude.
Deve-se notar que este problema não é um artefato (um erro idiossincrático do instrumento de medição / computação) do circuito analógico; em vez disso, é inerente ao processo de diferenciação. Não importa como possamos realizar a diferenciação, o “ruído” no sinal de velocidade invariavelmente corromperá o sinal de saída. Claro, se estivéssemos diferenciando um sinal duas vezes, como fizemos para obter velocidade e aceleração de um sinal de posição, a saída do sinal de ruído amplificado pelo primeiro circuito diferenciador será amplificado novamente pelo próximo diferenciador, agravando assim o problema:
A integração não sofre com esse problema, pois os integradores atuam como filtros passa-baixa, atenuando os sinais de entrada de alta frequência. Na verdade, todos os picos altos e baixos resultantes do ruído no sinal são calculados juntos ao longo do tempo, para um resultado líquido diminuído. Pode-se supor, então, que poderíamos evitar todos os problemas medindo a aceleração diretamente e integrando esse sinal para obter velocidade; na verdade, calculando "ao contrário" da maneira mostrada anteriormente:
Infelizmente, seguir esta metodologia pode nos levar a outras dificuldades, sendo uma delas um artefato comum de circuitos integradores analógicos conhecido como drift . Todos os amplificadores operacionais têm alguma quantidade de corrente de polarização de entrada e essa corrente tenderá a fazer com que uma carga se acumule no capacitor, além de qualquer carga que se acumule como resultado do sinal de tensão de entrada. Em outras palavras, todos os circuitos integradores analógicos sofrem com a tendência de ter sua tensão de saída “drift” ou “creep” mesmo quando não há absolutamente nenhuma tensão de entrada, acumulando erro ao longo do tempo como resultado. Além disso, os capacitores imperfeitos tendem a perder sua carga armazenada ao longo do tempo devido à resistência interna, resultando em um “desvio” para a tensão de saída zero. Esses problemas são artefatos do circuito analógico e podem ser eliminados pelo uso de computação digital.
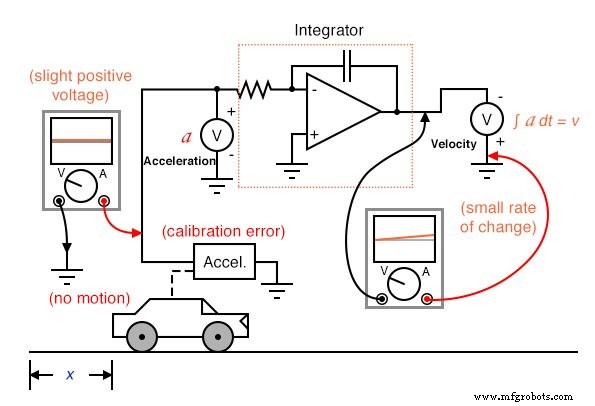
Apesar dos artefatos de circuito, possíveis erros podem resultar da integração de uma medição (como a aceleração) para obter outra (como a velocidade) simplesmente por causa da forma como a integração funciona. Se o ponto de calibração “zero” do sensor de sinal bruto não for perfeito, ele emitirá um leve sinal positivo ou negativo mesmo em condições em que não deveria produzir nada. Considere um carro com um acelerômetro mal calibrado ou que seja influenciado pela gravidade para detectar uma ligeira aceleração não relacionada ao movimento do carro. Mesmo com um computador de integração perfeita, esse erro do sensor fará com que o integrador acumule erros, resultando em um sinal de saída indicando uma mudança de velocidade quando o carro não está acelerando nem desacelerando.
Tal como acontece com a diferenciação, este erro também se agravará se o sinal integrado for passado para outro circuito integrador, uma vez que a saída “drifting” do primeiro integrador apresentará muito em breve um sinal positivo ou negativo significativo para o próximo integrador integrar. Portanto, deve-se ter cuidado ao integrar os sinais do sensor:se o ajuste “zero” do sensor não for perfeito , o resultado integrado irá variar, mesmo que o circuito integrador em si seja perfeito.
Até agora, os únicos erros de integração discutidos foram de natureza artificial:originados de imperfeições nos circuitos e sensores. Também existe uma fonte de erro inerente ao próprio processo de integração, que é a constante desconhecida problema. Alunos iniciantes em cálculo aprendem que sempre que uma função é integrada, existe uma constante desconhecida (geralmente representada como a variável C ) adicionado ao resultado. Esta incerteza é mais fácil de entender comparando as derivadas de várias funções que diferem apenas pela adição de um valor constante:
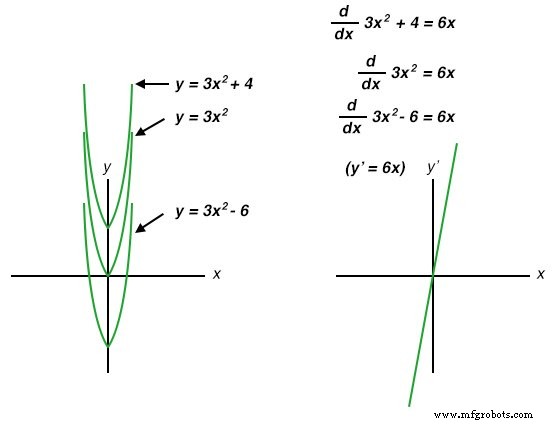
Observe como cada uma das curvas parabólicas ( y =3x 2 + C ) compartilham exatamente a mesma forma, diferindo entre si no que diz respeito ao deslocamento vertical. No entanto, todos eles compartilham exatamente a mesma função derivada: y ’=(d / dx) (3x 2 + C) =6x , porque todos compartilham taxas de mudança idênticas (declives) em pontos correspondentes ao longo do x eixo. Embora isso pareça bastante natural e esperado do ponto de vista da diferenciação (diferentes equações compartilhando uma derivada comum), geralmente parece estranho aos alunos iniciantes do ponto de vista da integração, porque há várias respostas corretas para a integral de uma função. Indo de uma equação para sua derivada, há apenas uma resposta, mas passando dessa derivada de volta para a equação original nos leva a uma gama de soluções corretas. Em homenagem a esta incerteza, a função simbólica de integração é chamada de integral indefinida .
Quando um integrador realiza integração de sinal ao vivo em relação ao tempo, a saída é a soma do sinal de entrada integrado ao longo do tempo e um valor inicial de magnitude arbitrária, representando a saída pré-existente do integrador no momento em que a integração começou. Por exemplo, se eu integrar a velocidade de um carro dirigindo em linha reta para longe de uma cidade, calcular que uma velocidade constante de 50 milhas por hora ao longo de 2 horas produzirá uma distância (∫ v dt ) de 100 milhas, isso não significa necessariamente que o carro estará a 100 milhas da cidade após 2 horas. Tudo o que nos diz é que o carro estará 100 milhas adiante longe da cidade após 2 horas de condução. A distância real da cidade após 2 horas de condução depende da distância que o carro estava da cidade quando a integração começou. Se não soubermos esse valor inicial para a distância, não podemos determinar a distância exata do carro da cidade após 2 horas de condução.
Este mesmo problema aparece quando integramos a aceleração em relação ao tempo para obter a velocidade:
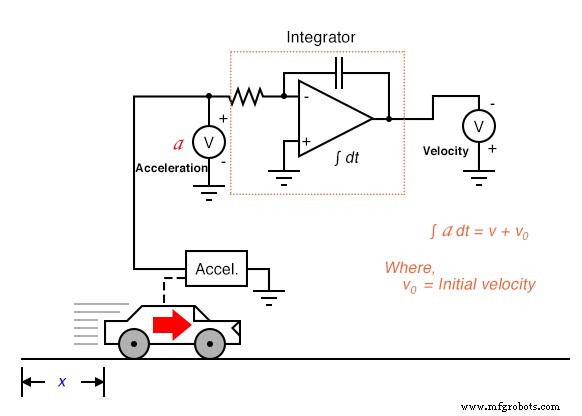
Neste sistema integrador, a velocidade calculada do carro só será válida se o circuito integrador for inicializado para um valor de saída de zero quando o carro está parado ( v =0). Caso contrário, o integrador poderia muito bem estar emitindo um sinal diferente de zero para velocidade ( v 0 ) quando o carro está parado, pois o acelerômetro não pode dizer a diferença entre um estado estacionário (0 milhas por hora) e um estado de velocidade constante (digamos, 60 milhas por hora, inalterado). Essa incerteza na saída do integrador é inerente ao processo de integração, e não um artefato do circuito ou do sensor.
Em resumo, se a precisão máxima for desejada para qualquer medição física, é melhor medir essa variável diretamente, em vez de computá-la a partir de outras medições. Isso não quer dizer que a computação seja inútil. Muito pelo contrário, muitas vezes é o único meio prático de obter uma medição desejada. No entanto, os limites do cálculo devem ser compreendidos e respeitados para que medidas precisas sejam obtidas.
PLANILHA RELACIONADA:
- Planilha de circuitos computacionais lineares
Tecnologia industrial
- Introdução aos Circuitos DC
- Introdução aos circuitos CA
- Introdução aos circuitos de semicondutores discretos
- Introdução aos circuitos integrados analógicos
- Circuitos integrados
- Circuitos de controle do motor
- Circuitos retificadores
- Circuitos de fonte de alimentação
- Circuitos de controle
- Energia em circuitos elétricos