


Como funcionam os sensores de tempo de vôo (ToF)? Uma olhada nas câmeras 3D ToF
Como os sensores de tempo de vôo determinam as distâncias? Saiba mais sobre câmeras ToF usando um exemplo de câmera 3D.
Como os sensores de tempo de vôo determinam as distâncias? Saiba mais sobre câmeras ToF usando um exemplo de câmera 3D.
Existem três tecnologias de imagem 3D líderes que competem por espaço em seu celular e em seu automóvel. Essas tecnologias são imagens estereoscópicas, projeção de luz estruturada e câmeras de tempo de voo (ou ToF). Os dados gerados por esses dispositivos podem fornecer detecção de pedestres, autenticar usuários com base em características faciais, detectar movimentos das mãos e alimentar algoritmos SLAM (localização e mapeamento simultâneos).
Dois dos maiores jogadores neste espaço são ams e Infineon. No momento em que este artigo foi escrito, o ams carregava um de cada tipo de sensor e a Infineon se concentrava apenas nos sensores de tempo de vôo.
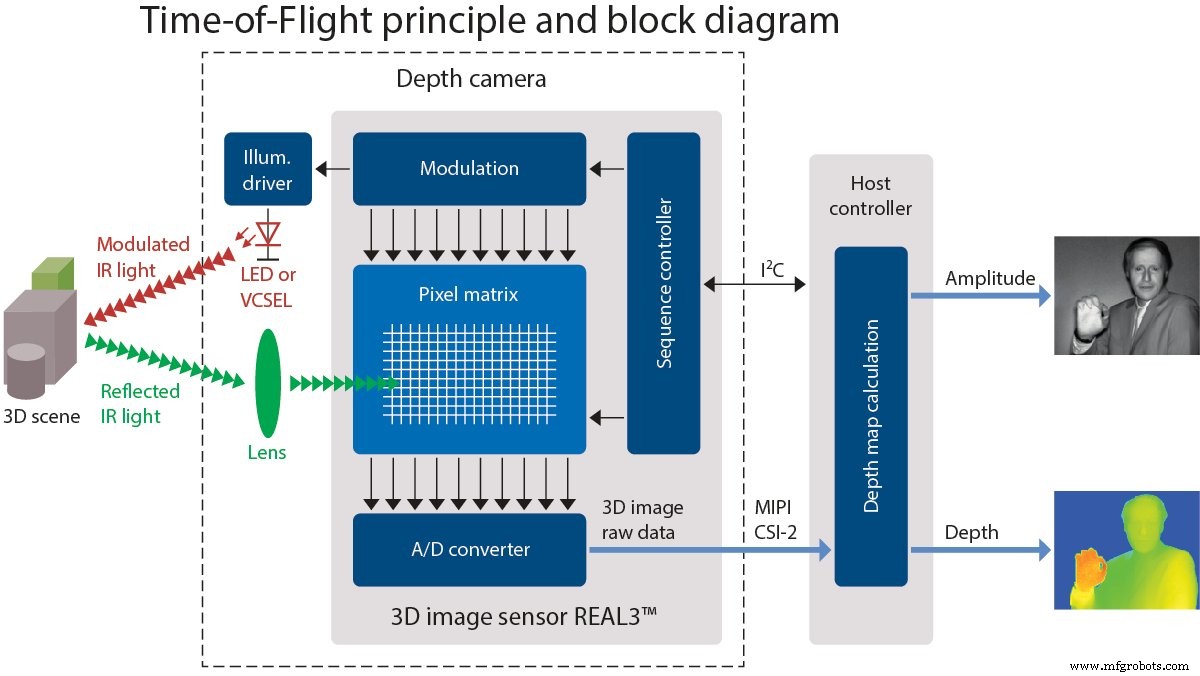
Este artigo descreve a tecnologia por trás dos sensores de tempo de voo, concentrando-se em um kit de desenvolvimento de câmera 3D “pico flexx” da pmdtechnologies. (Antes que você pergunte, "pico flexx" e "pmdtechnologies" são apresentados em minúsculas em seus sites.).
O pico flexx é construído em torno do sensor de imagem 3D REAL3 desenvolvido em conjunto pela Infineon e pmd.
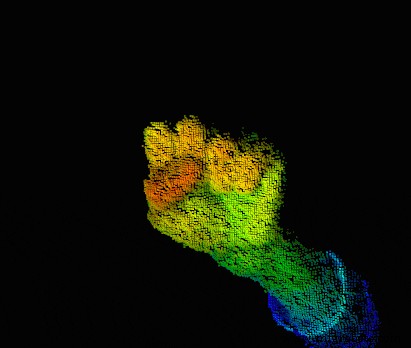
Imagem 3D em cores falsas de uma mão tirada de pmdtec.com em 29 de abril de 2019. As cores são mapeadas para pixels individuais com base na distância do sensor à mão (o vermelho está próximo, o azul está longe)
Observe que o pmd nos forneceu um dispositivo para este artigo.
O que é um sensor de tempo de vôo?
Os sensores de tempo de vôo medem o tempo que algo leva para percorrer uma distância através de um meio. Normalmente, esta é a medição do tempo decorrido entre a emissão de um pulso de onda, seu reflexo em um objeto e seu retorno ao sensor ToF. Uma câmera de tempo de vôo é um dispositivo que utiliza medição ToF para determinar distâncias entre a câmera e objetos ou ambientes, criando imagens geradas por pontos medidos individualmente.
As aplicações das câmeras ToF incluem sistemas de imagem LiDAR sem scanner baseados em laser, detecção e rastreamento de movimento, detecção de objetos para visão de máquina e direção autônoma, mapeamento topográfico e muito mais.
Mas como essas medições são realizadas?
Abaixo, representei três maneiras de usar o tempo de viagem para determinar a distância.
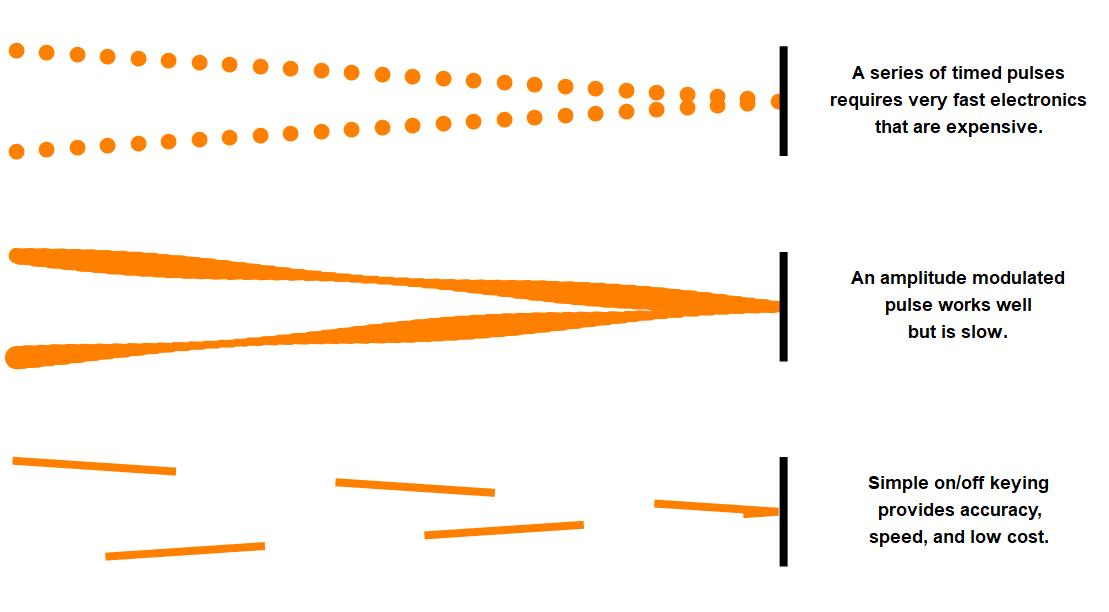
Métodos de uso do tempo de viagem para determinar distâncias
No topo da imagem, você pode ver o primeiro método, que é enviar pulsos e medir o intervalo de tempo até que eles retornem após a reflexão.
O meio da imagem mostra o segundo método, em que você pode modular a amplitude de uma fonte de luz e registrar a mudança de fase da onda refletida.
A parte inferior da imagem representa o terceiro método, transmitindo uma onda quadrada de ciclo de trabalho de 50% e registrando a quantidade de luz retornada que chega em um intervalo específico.
Câmeras ToF de precisão de nível milimétrico
As ondas de luz e rádio viajam a quase 300.000.000.000 mm / s, o que se traduz em ~ 3,3 ps para uma onda viajar 1 mm (e outros 3,3 ps para retornar). Isso significa que, se você deseja um dispositivo que possa criar imagens de todos os objetos na sala em que você está e deseja uma resolução de ~ 1 mm, sua eletrônica de cronometragem precisará de uma resolução de picossegundos. Isso se traduz em uma velocidade de clock de centenas de GHz.
Não é fácil nem econômico projetar circuitos eletrônicos que operem nessas frequências, então os projetistas tiveram que encontrar uma maneira de trabalhar em frequências mais baixas se esperavam trazer os dispositivos acessíveis para o espaço do consumidor.
Existem dois métodos comuns para atingir a precisão de nível milimétrico enquanto se trabalha com frequências sub-GHz razoáveis:
- Relacionando a mudança de fase de uma onda modulada senoidalmente com a distância
- Usando a mudança de fase de uma onda quadrada de ciclo de trabalho de 50% e uma tensão diferencial para determinar a distância
Nas seções a seguir, veremos esses dois métodos com mais detalhes.
Determinando a distância por deslocamento de fase de uma onda modulada em amplitude
Digamos que você esteja planejando um pequeno escritório ou uma grande sala de estar com comprimento máximo de 15 m. Para determinar uma frequência operacional apropriada para esse comprimento, use $$ c =\ lambda \ cdot f $$ onde c é a velocidade da luz (c =3x10 8 m / s), λ é um comprimento de onda (λ =15 m) e ƒ é a frequência. Neste exemplo, ƒ =20 MHz, que é uma frequência relativamente fácil de trabalhar.
Tudo começa quando uma luz brilhante tem sua saída modulada com um sinal senoidal de 20 MHz. A onda de luz acabará atingindo um objeto ou a parede e refletirá e inverterá as direções. Uma versão mais fraca da luz modulada original retornará ao receptor. A menos que o objeto seja exatamente um múltiplo inteiro de 15 metros de distância, a fase será alterada em alguma quantidade.
A mudança de fase pode ser usada para calcular a distância que a onda viajou.
Se você puder medir com precisão o ângulo de fase, poderá determinar com precisão a distância que o objeto refletor está do sensor / receptor.
Como medir o ângulo de fase de um sinusóide
Então, como você mede rapidamente o ângulo de fase de uma sinusóide? Isso envolve a medição da amplitude do sinal recebido em quatro pontos igualmente espaçados (ou seja, uma separação de 90 ° ou 1/4 λ).
$$ \ varphi =ArcTan \ left (\ frac {A_1-A_3} {A_2-A_4} \ right) $$
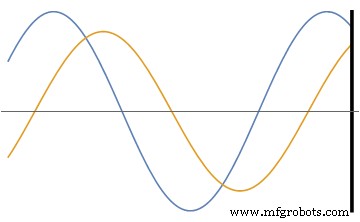
Tentei ilustrar a relação entre as medições e o ângulo de fase abaixo. A proporção da diferença entre A 1 e A 3 e a diferença entre A 2 e A 4 é igual à tangente do ângulo de fase. ArcTan é na verdade a função arco tangente de dois argumentos que mapeia quadrantes apropriados e define quando A 2 =A4 e A 1 > A 3 ou A 3 > A 1 como 0 ° ou 180 °, respectivamente.
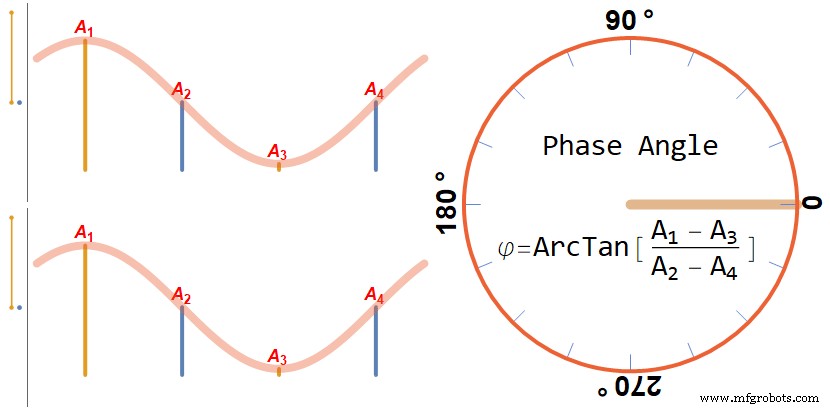
Clique no diagrama para ver uma imagem mais complicada que ilustra como as diferenças das variáveis A 1 , A 2 , A 3 , e A 4 caber no círculo unitário.
Na ilustração acima, a extremidade esquerda do gráfico tem duas linhas numéricas verticais que mostram o resultado da subtração de A 1 e A 3 (representado como amarelo escuro) e A 2 e A 4 (representado em azul). Os valores medidos são mostrados como linhas verticais nos gráficos de senoide no meio.
Observe que este gráfico não leva em consideração o reflexo (o que efetivamente deslocaria tudo em 180 °).
Determinando a frequência operacional para uma determinada distância
De volta ao nosso exemplo, a distância ao alvo é determinada com a equação:
$$ d =\ frac {c \ cdot \ varphi} {4 \ pi \ cdot f} $$
Onde c é a velocidade da luz, phi (φ) é o ângulo de fase (em radianos) e ƒ é a frequência de modulação.
Medir o tempo de vôo real de um fóton requer componentes eletrônicos de 333 GHz. Este método requer no máximo 4x a frequência de modulação, que neste caso é 4x20 MHz =80 MHz. Esta é uma redução fenomenal de recursos. Mas você ficará feliz em saber que alguns engenheiros inteligentes encontraram uma maneira de reduzir ainda mais a frequência máxima.
Determinação da mudança de fase por meio da medição de tensão diferencial de capacitores carregados
A próxima situação de medição envolve uma fonte de luz estroboscópica e um sensor de imagem CMOS com dois capacitores por pixel.
Uma fonte de relógio gera uma onda quadrada de ciclo de trabalho de 50% e essa onda quadrada controla uma fonte de luz estroboscópica brilhante, bem como a conexão com os capacitores de armazenamento de carga dentro de cada pixel.
Um exemplo de tal sistema é representado na imagem abaixo:
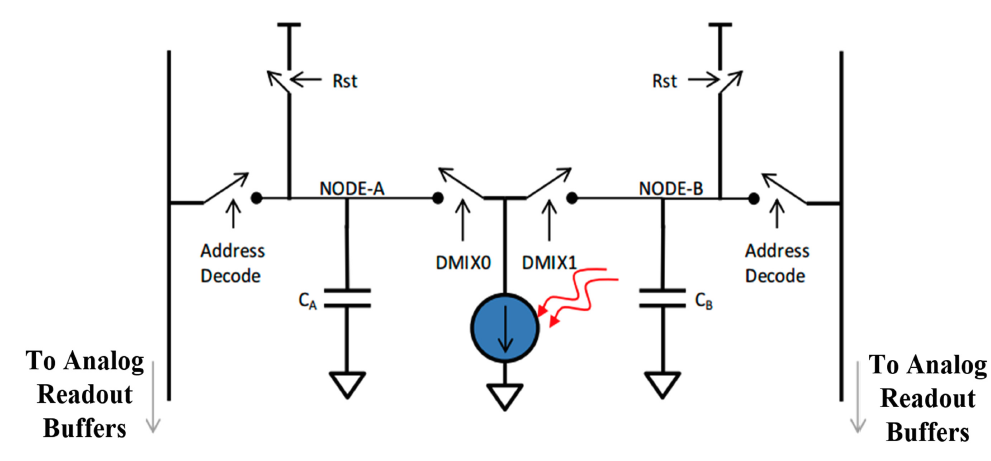
Imagem de “A Fast Calibration Method for Photonic Mixer Device Solid-State Array LiDARS” Isso mostra um pixel CMOS com dois capacitores de armazenamento de carga que são alternadamente conectados para registrar a entrada luz.
A luz sai da fonte, reflete em um objeto e atinge o pixel onde será gravada como uma carga no capacitor C A ou C B Mostrado acima. Os capacitores são conectados alternadamente ao pixel na mesma frequência da fonte de iluminação, usando a mesma fonte de clock.
Esse arranjo inteligente significa que a carga diferencial nos capacitores está diretamente relacionada ao deslocamento de fase. E a fase é determinada pelo comprimento de onda e pela distância até o alvo e vice-versa.
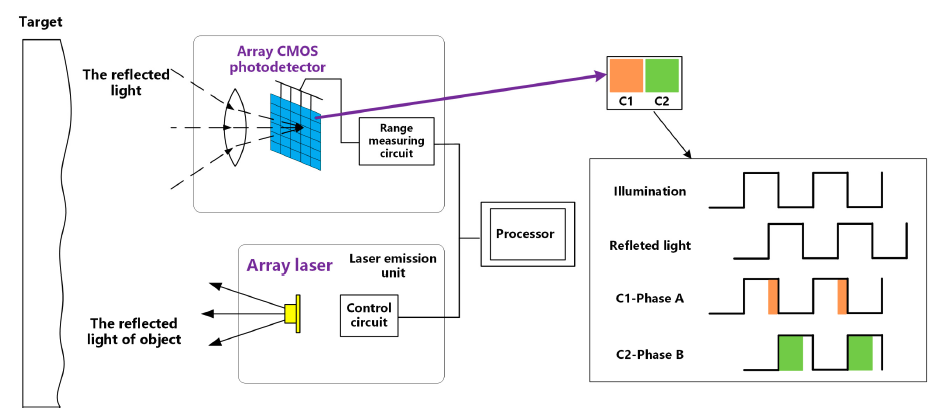
Imagem de “A Fast Calibration Method for Photonic Mixer Device Solid-State Array LiDARS”
O assunto pode ser iluminado por quantos ciclos forem necessários para preencher os capacitores. Enquanto a distância for constante, as proporções de carga permanecerão as mesmas
Sensores de tempo de vôo em ação
Este método funciona bem? Melhor do que você imagina.
O sensor fornecido ao AAC, combinado com o software que o acompanha, tem a capacidade de gravar até 45 fps. Com taxas de atualização mais baixas, o sistema pode facilmente detectar rugas em uma camisa.

A imagem acima plota a localização do vértice (x, y, z) de cada pixel capturado da câmera pico flexx do pmd.
Os dados apenas de profundidade são difíceis de visualizar por si só. Portanto, a imagem de profundidade é frequentemente combinada com uma fotografia ou mostrada usando cores falsas para permitir uma visualização mais fácil da cena.
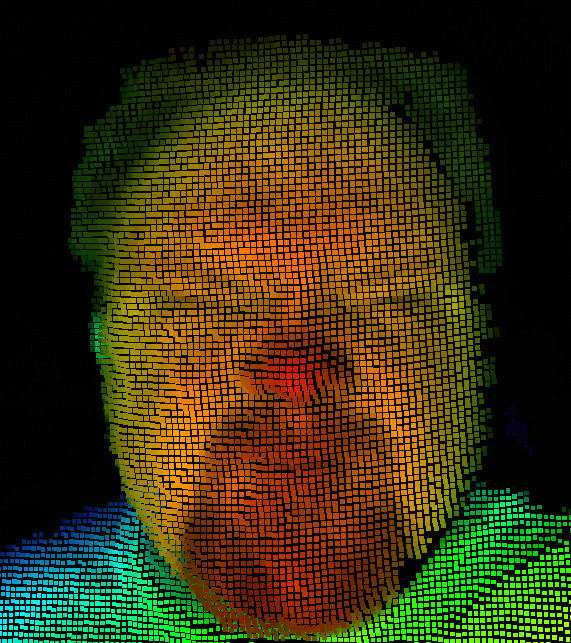
Uma sobreposição de profundidade de cores falsas de uma imagem de baixa resolução facilita a interpretação da cena. Imagem do autor goober capturada com o software Royal Viewer da pmd e o kit de desenvolvimento 3D CamBoard pico flexx.
Os sensores de tempo de vôo podem ser utilizados em uma variedade de aplicações, incluindo a criação de um mapa 3D do ambiente ao combinar física inteligente com engenharia.
Você já usou câmeras 3D em seu trabalho? O que você pode nos dizer sobre as restrições de design do uso de sensores de tempo de vôo? Compartilhe suas experiências nos comentários abaixo.
Tecnologia industrial
- O que é chamada WiFi? Como funciona?
- Problemas com pessoas:Como você está gerenciando?
- Como funcionam os sistemas SCADA?
- Como funciona a detecção de descarga parcial em comutadores?
- Equipamento de trabalho:é hora de um upgrade?
- Como funciona um motor CC escovado
- Como funcionam os sensores de nível do Biz4Intellia – seu desempenho e vida útil
- Como reduzir o tempo de troca com SMED e trabalho padrão
- Como funcionam os secadores de ar?
- Tempo de voo vs. Sistemas FMCW LiDAR