


Codificador Rotativo Arduino – Uma Diretriz para Usar Codificadores Rotativos Com Arduino
O codificador rotativo Arduino é útil em máquinas CNC, robótica e até impressoras devido à sua construção sólida e controle digital fino.
Se você está trabalhando em um projeto de codificador rotativo Arduino e precisa de ajuda, está no lugar certo.
O artigo de hoje analisa o codificador rotativo, sua configuração, tipos, funcionamento, exemplos e aplicações.
O que é um Codificador Rotary?
Fig 1:Um Codificador Rotary
É um sensor de posição eletromecânico que determina a posição ou movimento angular de um eixo ou eixo.
Em seguida, converte os dados de posição angular em sinais de saída digitais ou analógicos.
Pinagem do codificador rotativo
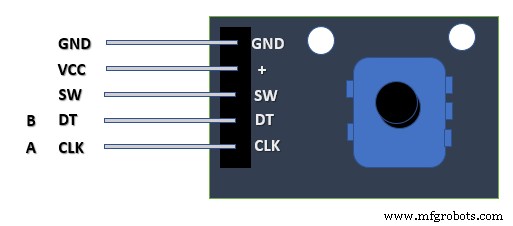
Fig 2:Pinagem do codificador rotativo
- VCC- Tensão de alimentação de 3,3 ou 5V
- GND- Terra
- SW- botão baixo ativo
- CLK (Saída A)- Pulso de saída para determinar a rotação em qualquer direção
- DT (Saída B)- Atrasa CLK em 90 graus e determina a direção de rotação
Tipos de Codificador Rotary
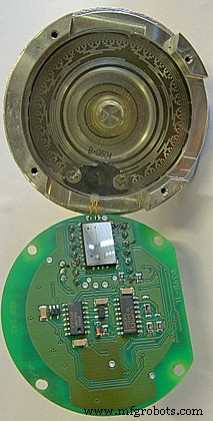
Fig 3:Um codificador rotativo absoluto de código cinza com 13 faixas
Fonte:Wikimedia
Codificador Absoluto
Consiste em um fotodetector, uma fonte de luz, um disco e um condicionador de sinal. Ele retém as informações de posição quando a energia é perdida e retoma quando volta.
Além disso, a relação entre a posição física do maquinário controlado e o valor do codificador é definida na montagem. Você não precisa retornar a um ponto de calibração para manter a precisão da posição.
Codificador incremental
Os codificadores incrementais começam sua contagem em zero quando ligados e relatam imediatamente as mudanças de posição. No entanto, não mantém sua posição absoluta. Você terá que mover um sistema de monitoramento para um ponto de referência fixo para iniciar uma leitura de posição.
Como funciona o Rotary Encoder?
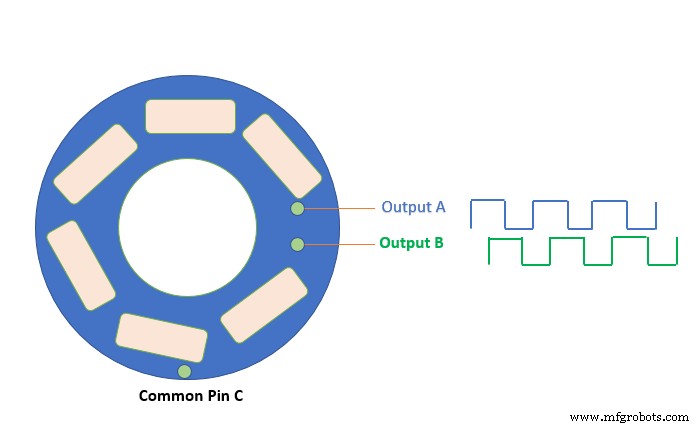
Fig 4:Funcionamento de um codificador Rotary
Ele tem dois pinos de contato, A e B, e um pino de aterramento comum, C. Quando você gira os botões de contato A e B do pino C na ordem de rotação, eles produzem sinais. Além disso, os sinais estão 90 graus defasados entre si (codificação em quadratura).
Quando você gira o botão no sentido horário, o pino A se conecta primeiro, seguido pelo B. Além disso, o oposto acontece quando você gira o botão no sentido anti-horário.
Podemos então rastrear quando os pinos se conectam e se desconectam do solo para determinar a direção de rotação.
Como escolher o codificador Rotary?
Codificador incremental ou absoluto?
Escolha um com melhor relação custo/capacidade ou um que retorne ou não à origem durante a inicialização. Além disso, escolha um dependendo da tolerância ao ruído e da velocidade máxima.
Qual é a resolução necessária?
Escolha um que corresponda à precisão necessária e ao custo do equipamento. Portanto, você deve selecionar um com resolução de ½ a ¼ da precisão da máquina usada.
Dimensões
Considere o tipo de eixo rotativo a ser utilizado em relação ao espaço de montagem. Para sua informação, os eixos podem ser ocos ou regulares.
Carregamento de eixo permitido
Ao escolher um encoder, considere como os métodos de montagem influenciam a carga do eixo e a vida mecânica.
Velocidade máxima permitida
Selecione um considerando sua velocidade mecânica máxima durante o uso.
Frequência máxima de resposta
Selecione um com base na velocidade máxima do eixo do dispositivo quando usado em conjunto.
Frequência máxima de resposta =(Revoluções (RPM)/60) * Resolução.
Certifique-se de selecionar um cujas especificações forneçam certa margem de manobra em relação ao valor máximo da frequência de resposta.
Grau de proteção
Escolha um modelo de acordo com a poeira, óleo e água presentes em seu ambiente de trabalho.
- Somente poeira:IP50
- Presença de água ou óleo:IP52 (f), IP64 (f)
- Óleo presente:selecione os à prova de óleo
Torque de partida do eixo
Neste caso, considere o torque de partida.
Tipo de circuito de saída
Aqui, considere a frequência do sinal, distância de transmissão, ruído e dispositivo de conexão.
Vantagens e desvantagens dos codificadores Rotary
Fig 5:Peça mecânica do motor de passo e da polia de sincronização para impressoras 3D e máquinas CNC
Vantagens
- Alta resolução
- Comentários de baixo custo
- Alta precisão e confiabilidade
- Compacto
- Combina tecnologia digital e óptica
Desvantagens
- Os sinais de rádio e magnéticos interferem nos codificadores magnéticos
- A luz direta interfere nos codificadores ópticos
- Afetado por óleo, sujeira e poeira
Exemplo de codificador rotativo Arduino
Exemplo básico
Você precisará de uma placa Arduino, um LCD, um potenciômetro, fios de conexão e uma placa de ensaio. Conecte como mostrado abaixo.
Conecte o pino +V do módulo ao pino de 5V do Arduino e aterre sua configuração. Em seguida, conecte os pinos CLK e DT aos pinos digitais 2 e 3, respectivamente.
Controle de um motor de passo usando um codificador rotativo
Você precisará de uma placa Arduino, um motor de passo e uma placa de driver, um codificador rotativo e uma placa de ensaio.
Conecte o codificador GND ao Arduino GND e o + ao pino Arduino 5V. Além disso, conecte o DT ao pino analógico 5 do Arduino e o CLK ao pino analógico 4 do Arduino.
Controle o servomotor com codificador rotativo
Os codificadores rotativos são cruciais em projetos que precisam de uma posição precisa de objetos, como o braço de um robô.
Para usar, aterre o fio marrom/preto do servo motor. Além disso, conecte o fio vermelho do servo motor a uma fonte de 5V. Finalmente, o fio laranja/amarelo para o pino 9 habilitado para PWM.
Conclusão
Como vimos, você pode usar um codificador rotativo com Arduino para muitos de seus projetos. Eles são simples de usar, versáteis e baratos de adquirir. Para assistência com seu projeto, ou se você tiver algumas áreas cinzentas que precisam de esclarecimento, entre em contato conosco.
Sensor de intensidade de luz:recursos, aplicativos e como usá-lo com Arduino
Tipos de conector RJ45:um guia básico
Tecnologia industrial
- Protocolos de comunicação:Revisão das opções para aplicativos do codificador
- Painel LCD com Arduino para o simulador de vôo
- Switch / Painel de LED com Arduino para FS2020
- 6 Dicas simples para reparo e solução de problemas do codificador
- Luzes de dimerização com PWM usando o botão de ação
- Sistema de atendimento usando Arduino e RFID com Python
- Roda de medição simples DIY com codificador rotativo
- Usando o sensor de pulso vestível MAX30100 com Arduino
- Usando chapa metálica perfurada para ventilação
- Codificadores rotativos melhoram a precisão absoluta da posição do robô