


Faça uma máquina de escrever trabalhos de casa DIY em casa
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Ferramentas e máquinas necessárias
 |
|
Aplicativos e serviços online
 |
|
Sobre este projeto
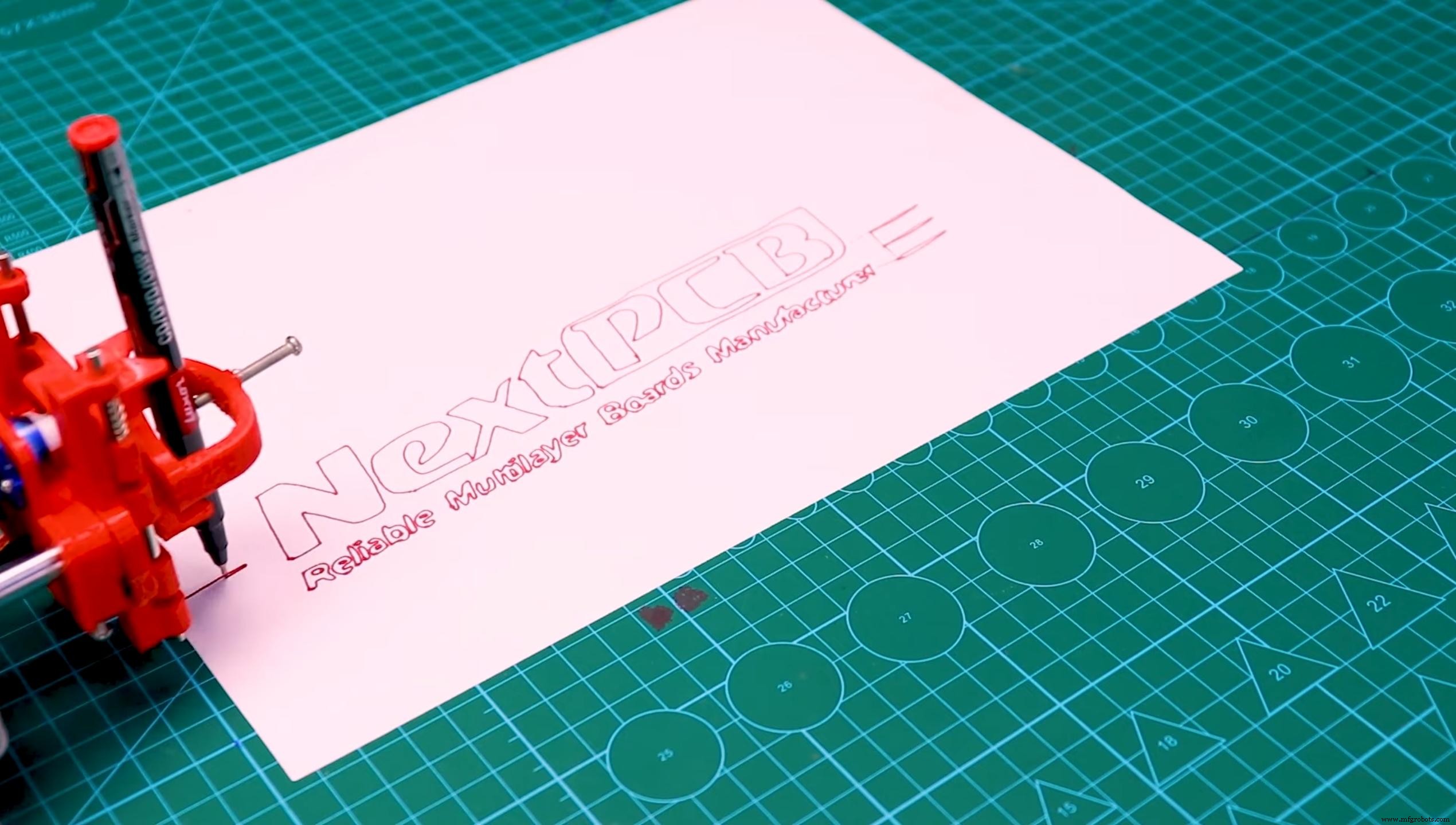
Drawing Robot / Pen Plotter / Drawing Machine é uma versão Open Hardware da famosa máquina AxiDraw que é uma caneta plotter, capaz de escrever ou desenhar em quase qualquer superfície plana. Ele pode escrever com canetas, marcadores permanentes, lápis e outros instrumentos de escrita para lidar com uma variedade infinita de aplicações.
Seu design exclusivo apresenta uma cabeça de escrita que se estende além da máquina, tornando possível desenhar em objetos maiores do que a própria máquina. A maior vantagem da máquina é que ela pode ser colocada sobre o livro devido ao design de extensão XY do núcleo da máquina.
Este robô de desenho / plotter de caneta / máquina de desenho é semelhante ao AxiDraw disponível comercialmente. Ele é alimentado por um controlador Arduino Uno, usa um CNC Shield e firmware GRBL
O custo para construir o Robot de desenho é entre US $ 75, dependendo de onde você compra suas peças e se você já possui algumas das peças, como o Arduino.
Você pode encontrar todos os meus projetos em https://www.diyprojectslab.com/
Área máxima de desenho 24 * 30 CM.
Obrigado NextPCB
Este projeto foi concluído com sucesso devido à ajuda e suporte do NextPCB. Pessoal, se vocês têm um projeto PCB, por favor, visite o site deles e ganhe descontos e cupons incríveis.
Frete grátis 0 $ PCB Prototype : https://www.nextpcb.com/pcb-quote? Act =2 &code =Romeo ...
Vitória de 100% do sorteio do Natal de Ação de Graças:https://www.nextpcb.com/christmas-lucky-draw? Código ...
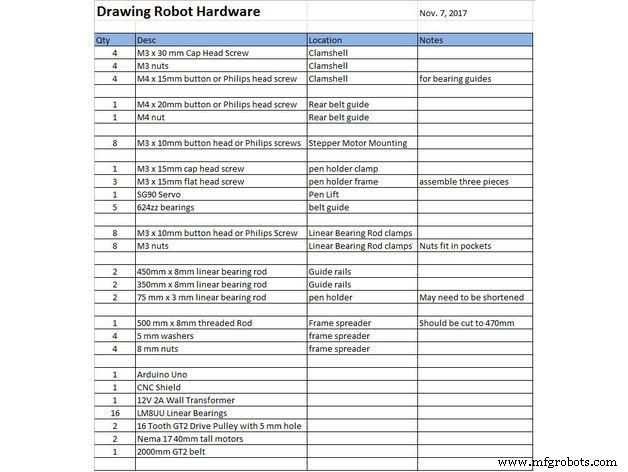
Etapa 1:peças e materiais necessários

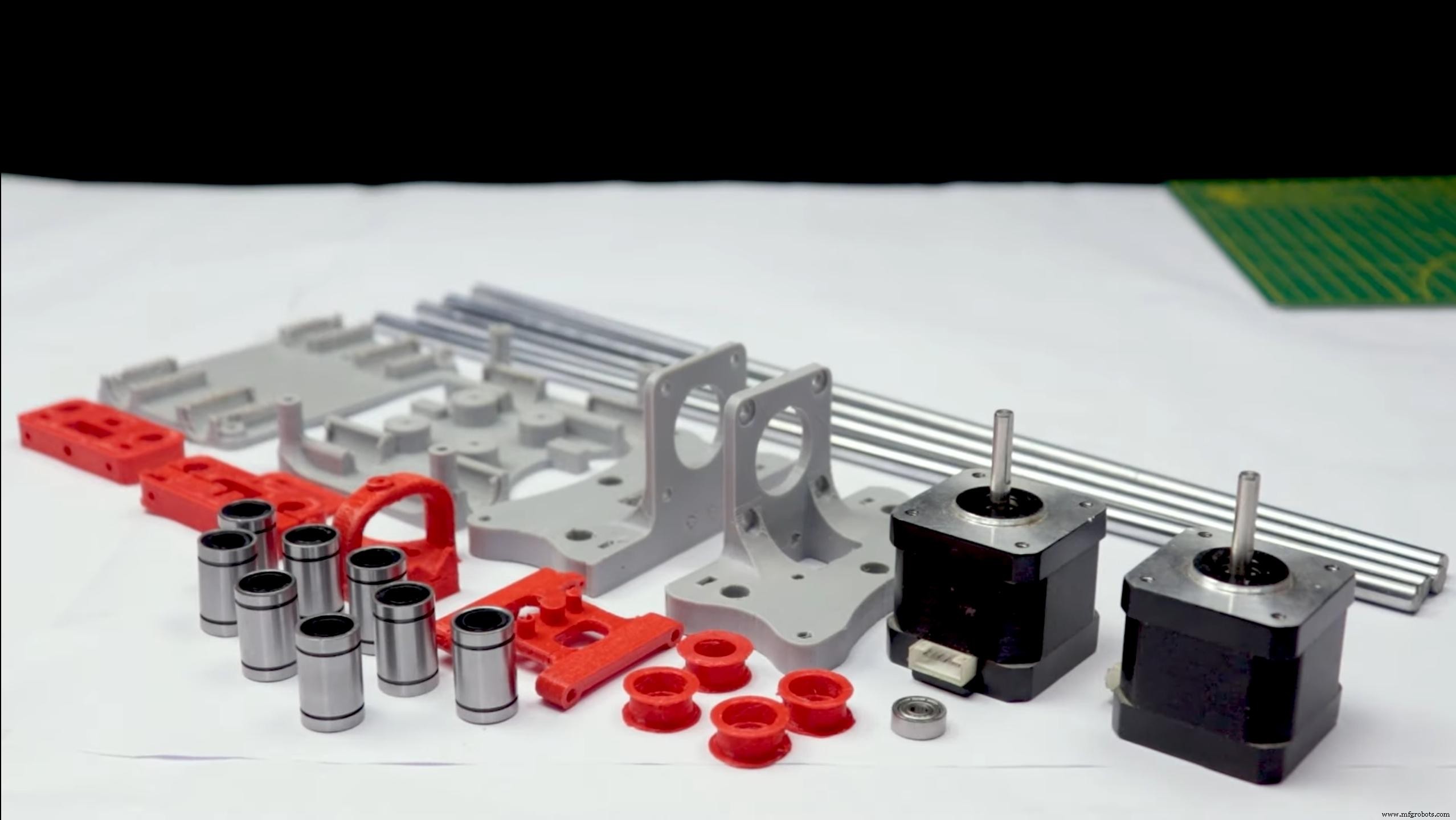
2 x Nema 17 Stepper Motors Amazon.com
2 x Haste Linear M8 x 450mm para X Axis Amazon.com
2 x Haste Linear M8 x 350 mm para Y Axis Amazon.com
2 x Haste linear de 3 mm para o eixo Z (você pode obtê-lo no CD-ROM antigo)
1 x haste roscada M8 x 480mm8 x rolamentos LM8UU Amazon.com
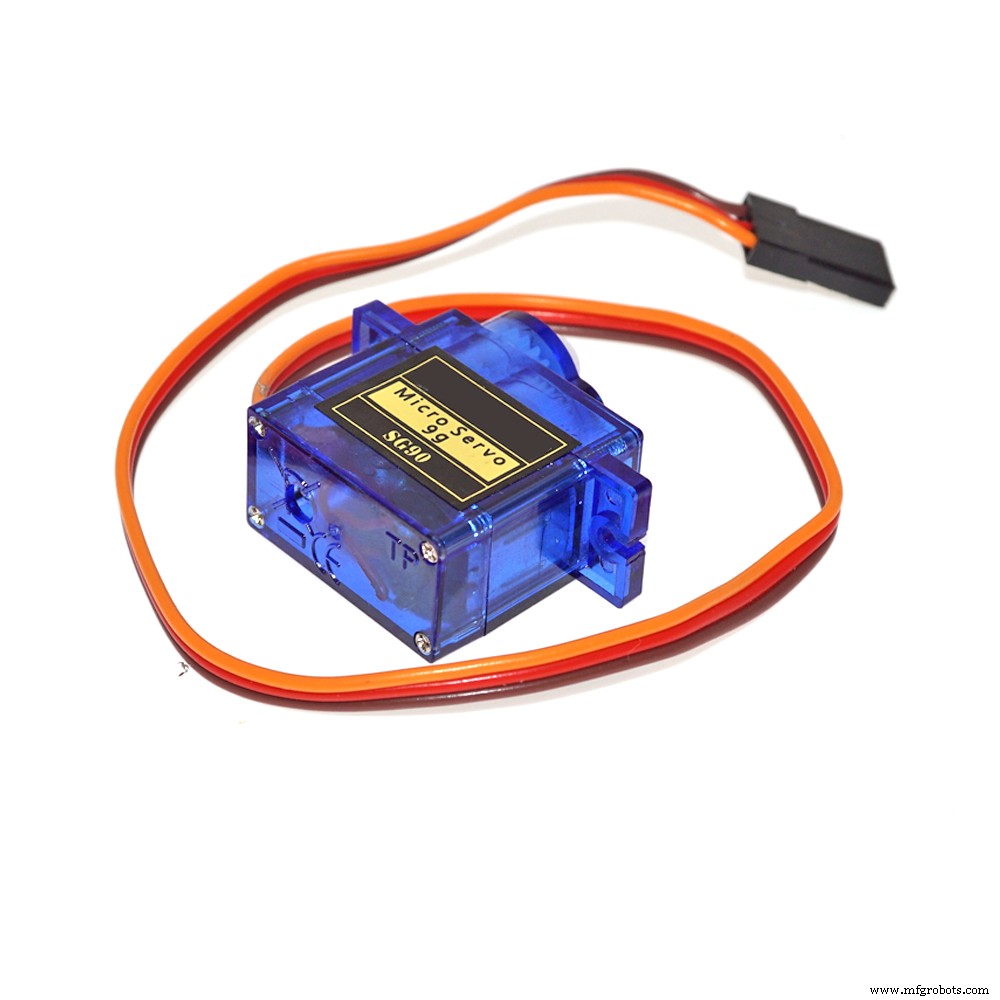
1 x Servo Sg901 x Primavera 5m (da caneta esferográfica) Amazon.com
2 x polia GT2, 16 dentes Amazon.com
5 x Rolamento 624zz Amazon.com
1 x cinto GT2 de 2.000 mm Amazon.com
1 x Arduino Uno Amazon.com
1 x CNC Shield Amazon.com
2 x A4988 Stepper driver com dissipador de calor Amazon.com
6 x Jumpers Amazon.com
Fonte de alimentação 1 x 12V 2A Amazon.com
Nozes
- 7 x M3-0,5
- 5 x M4-0,7
- 4 x 5/16 em 18
Amazonas
Parafusos
- 13 x Phillips M3-0,5 x 16 mm
- 4 x Phillips M3-0,5 x 6 mm
- 5 x Phillips M4-0,7 x 35 mm
- 1 x Hex M3-0,5 x 20 mm
Arruelas
- arruela 4 x 5/16 pol.
- 4 arruelas M3
Etapa 2:Impressão 3D

Baixe os arquivos do Thingiverse
Abra os modelos 3D no Cura ou qualquer outro fatiador.
Use 75% de preenchimento em todas as peças (um preenchimento de 70 - 100% também funcionará)
Impressas todas as peças com camada de 0,10 - 0,20 mm de altura
Impresso com PLA
Use suportes no Penholder, Slider, X_Support_L e X_Support_R
Observação:a parte mais longa levou cerca de 10 horas e a mais curta 30 minutos para imprimir
PLA é adequado para este design. Eu imprimo a 200C no BuildTak. Nenhuma das peças requer jangadas ou abas. Eu sugiro suportes apenas para o porta-canetas e a placa final do eixo Z que está de pé.
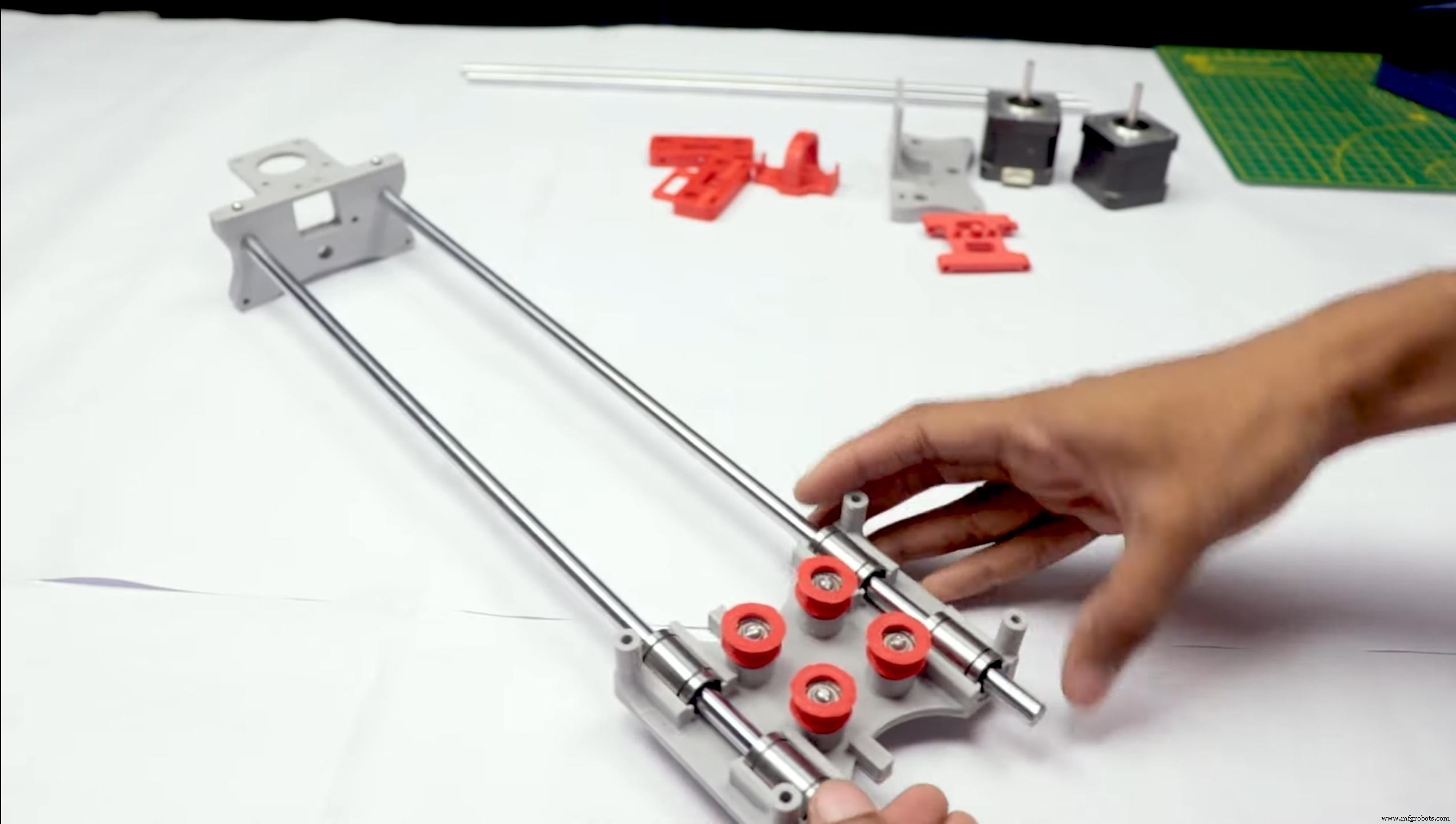
Etapa 3:montar o eixo X
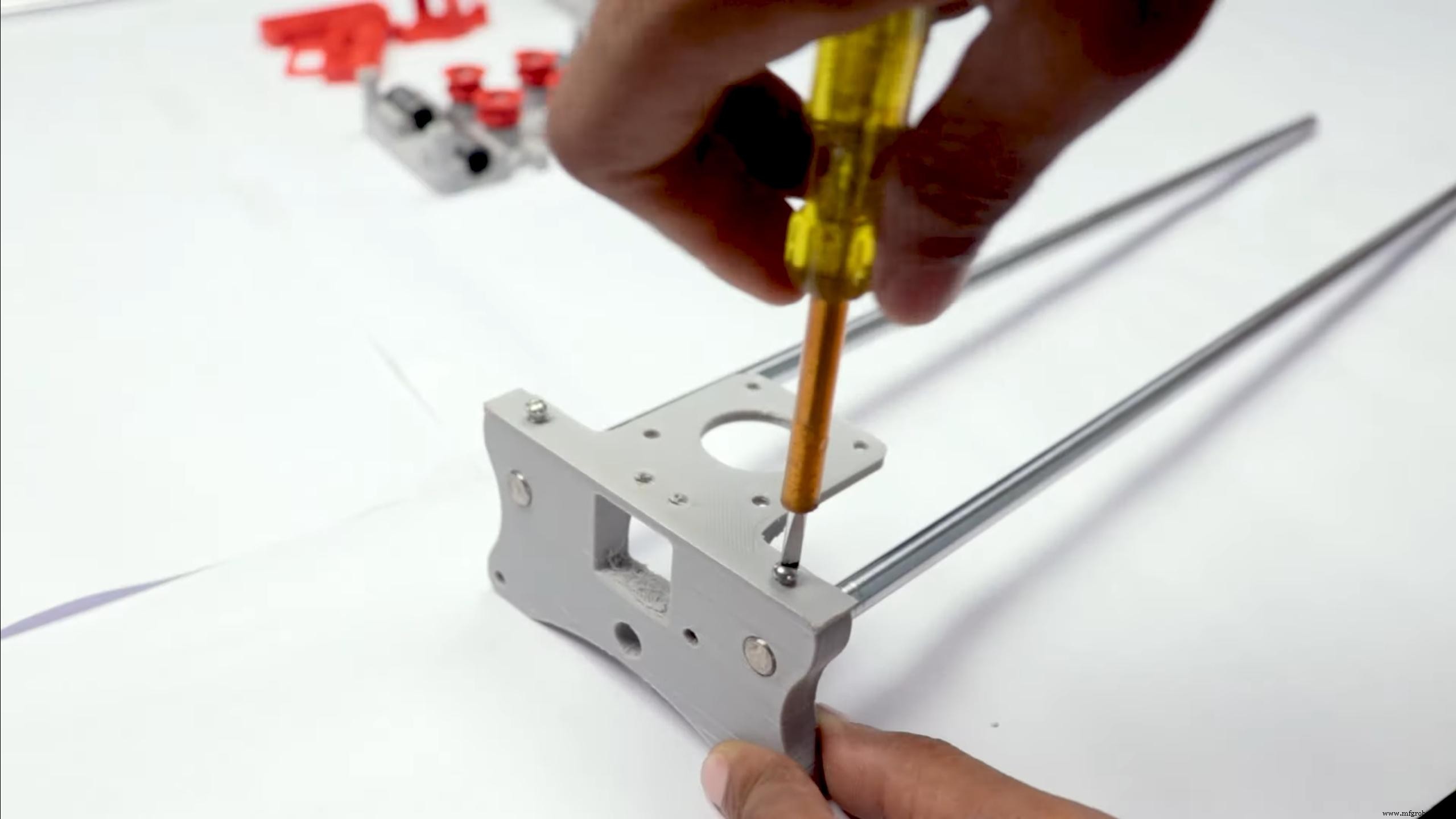
Lembre-se de que você precisa de hastes lineares de (2) 350 mm e (2) 450 mm de comprimento
Pegue o (2) 450 mm hastes lineares e insira-as em qualquer parte do suporte x
- Pode ser necessário usar uma lima redonda para alisar os orifícios em que você os insere
- Além disso, você pode usar um martelo de borracha para ajudar a inserir as hastes
Agora pegue a haste roscada e insira-a no orifício abaixo. Alimente uma arruela de 5/16 pol. E uma porca de 5/16 pol. Em ambos os lados da peça do suporte x
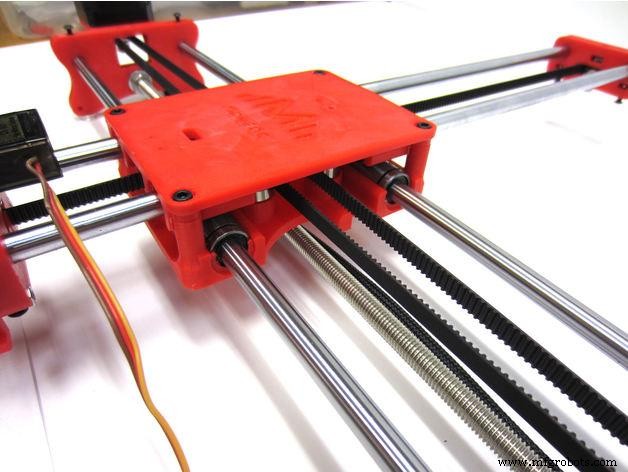
Etapa 4:monte o rolamento do eixo X


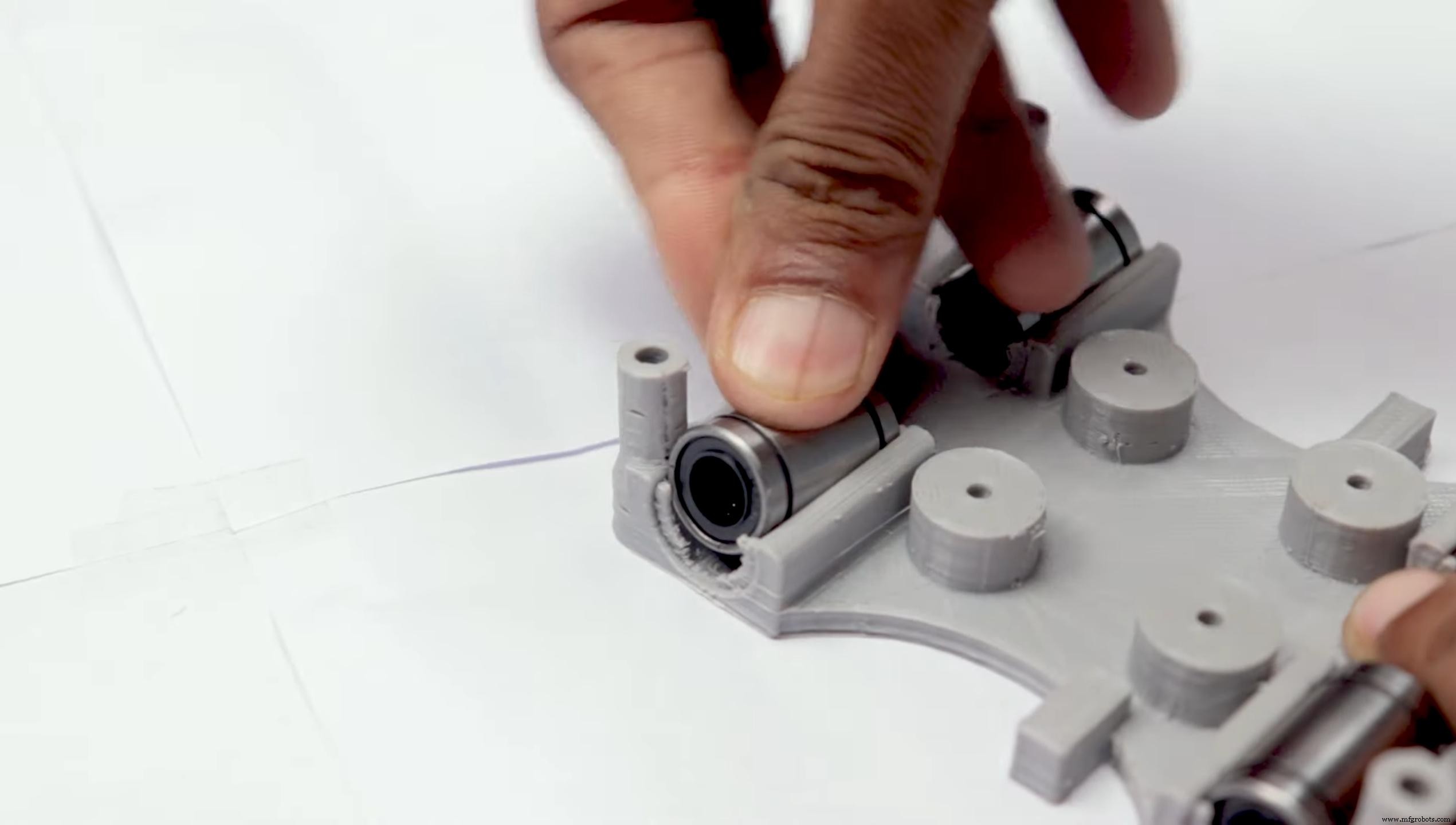


Agora você deseja empurrar os rolamentos LM8UU em seus lugares na parte superior e inferior da garra (a parte superior e inferior da garra pegam (4) rolamentos cada)
Pegue (4) rolamentos 624zz e empurre-os através das polias intermediárias impressas em 3D. Deixe o 5º rolamento para mais tarde, quando montar o eixo Y
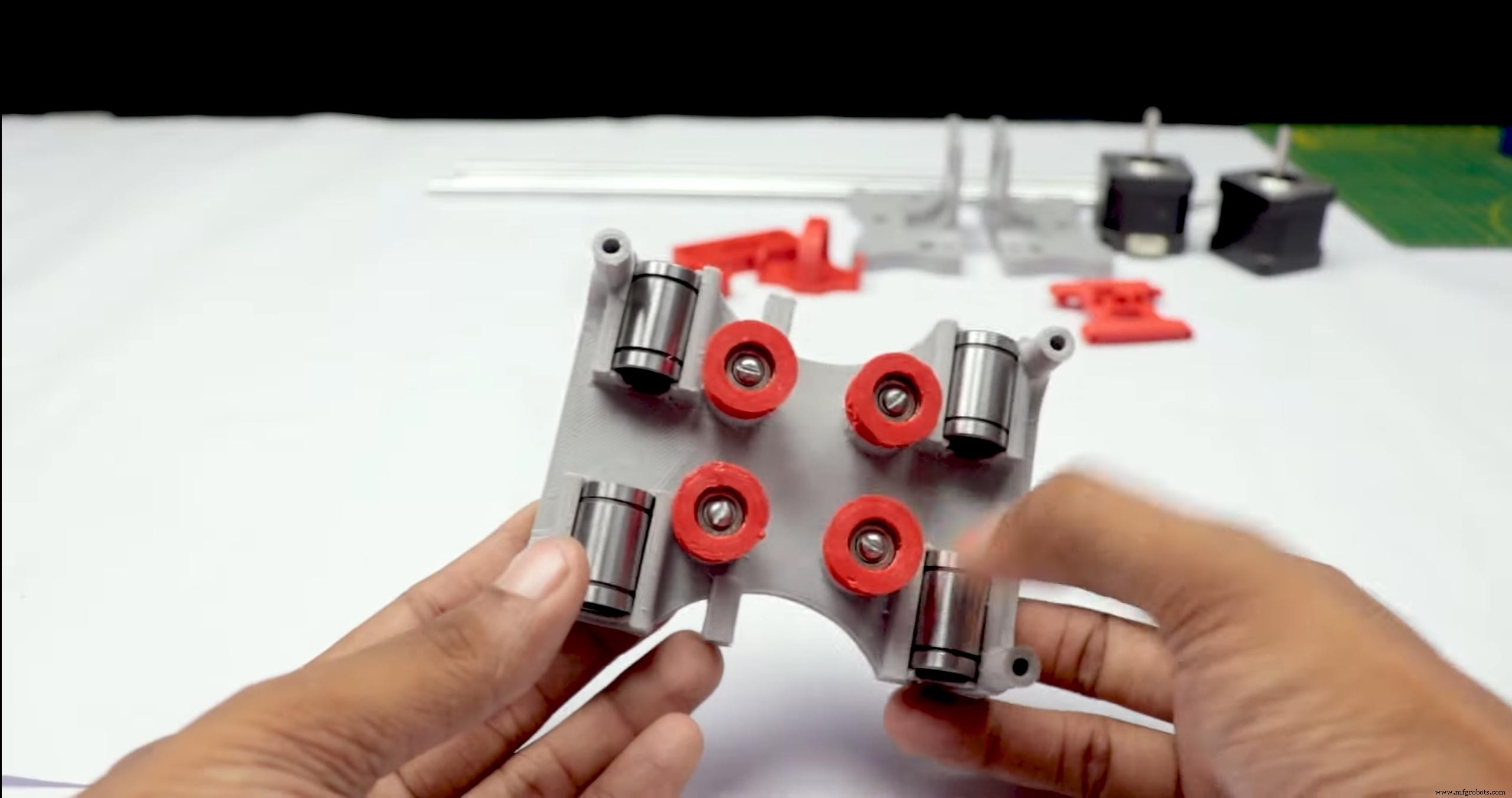
Monte o eixo X (carro)
- Obtenha (4) parafusos M3-0,5 x 20mm, (4) porcas M3, (4) arruelas M3 e (4) rolamentos 624zz com as polias intermediárias instaladas
- Pegue um parafuso e alimente uma arruela através dele, a arruela irá descansar no rolamento. A porca ficará na parte inferior do carro, o que fixará o rolamento no lugar
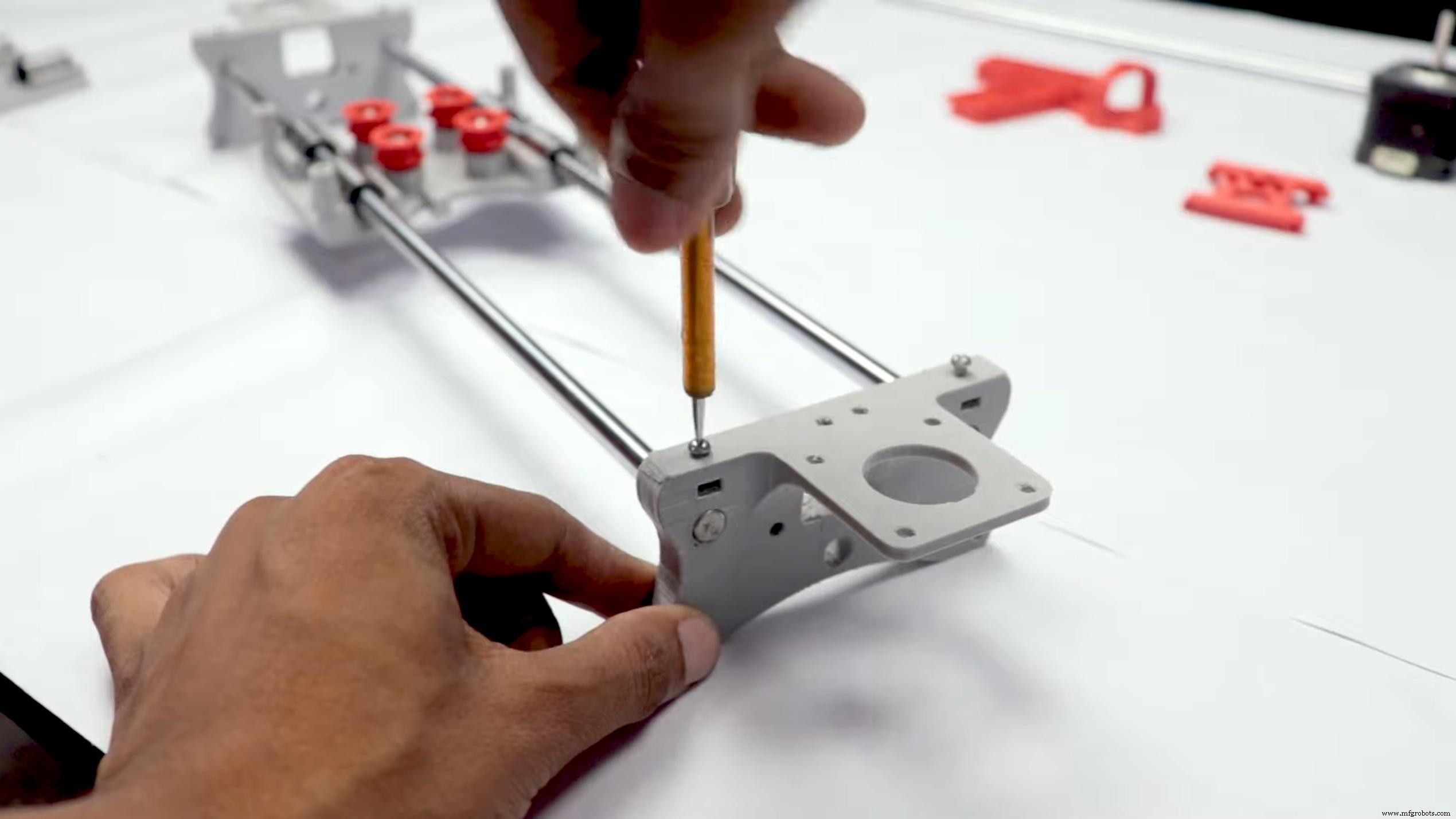
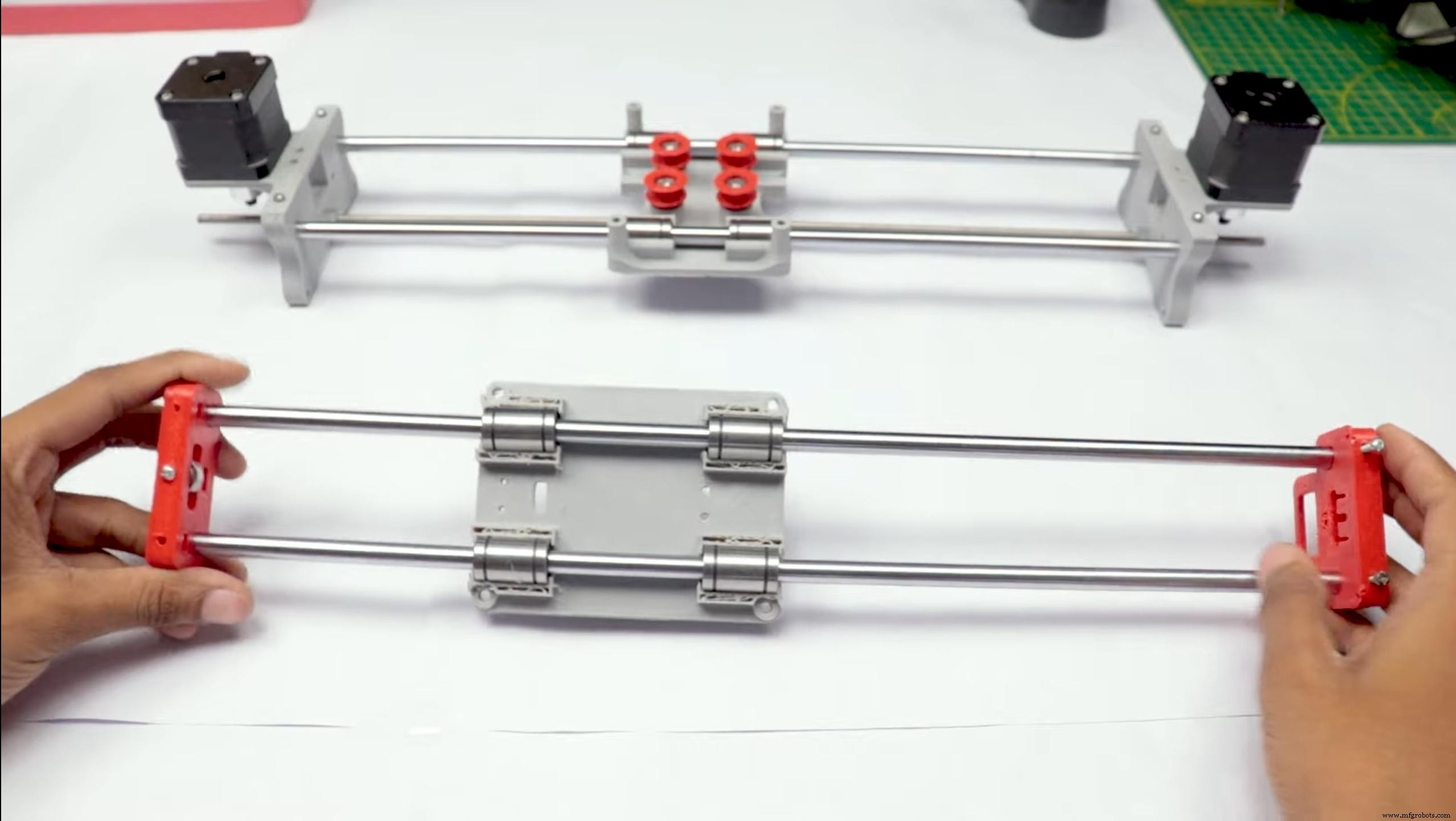
Monte o eixo X (suporte X)
- Deslize a garra através das hastes lineares de 450 mm (eixo X)
- Use um martelo de borracha novamente para prender o último suporte X nas hastes lineares
- Certifique-se de que as hastes se projetam igualmente em ambos os lados
- Deslize a outra extremidade da haste roscada através do orifício no suporte X
- Coloque o último conjunto de porcas e arruelas para segurar o suporte X no lugar
- Agora que o eixo X está completo, você pode usar (2) parafusos Phillips M3-0,5 x 16 mm por suporte X para ajudar a evitar que as hastes lineares deslizem
Etapa 5:montar o eixo Y
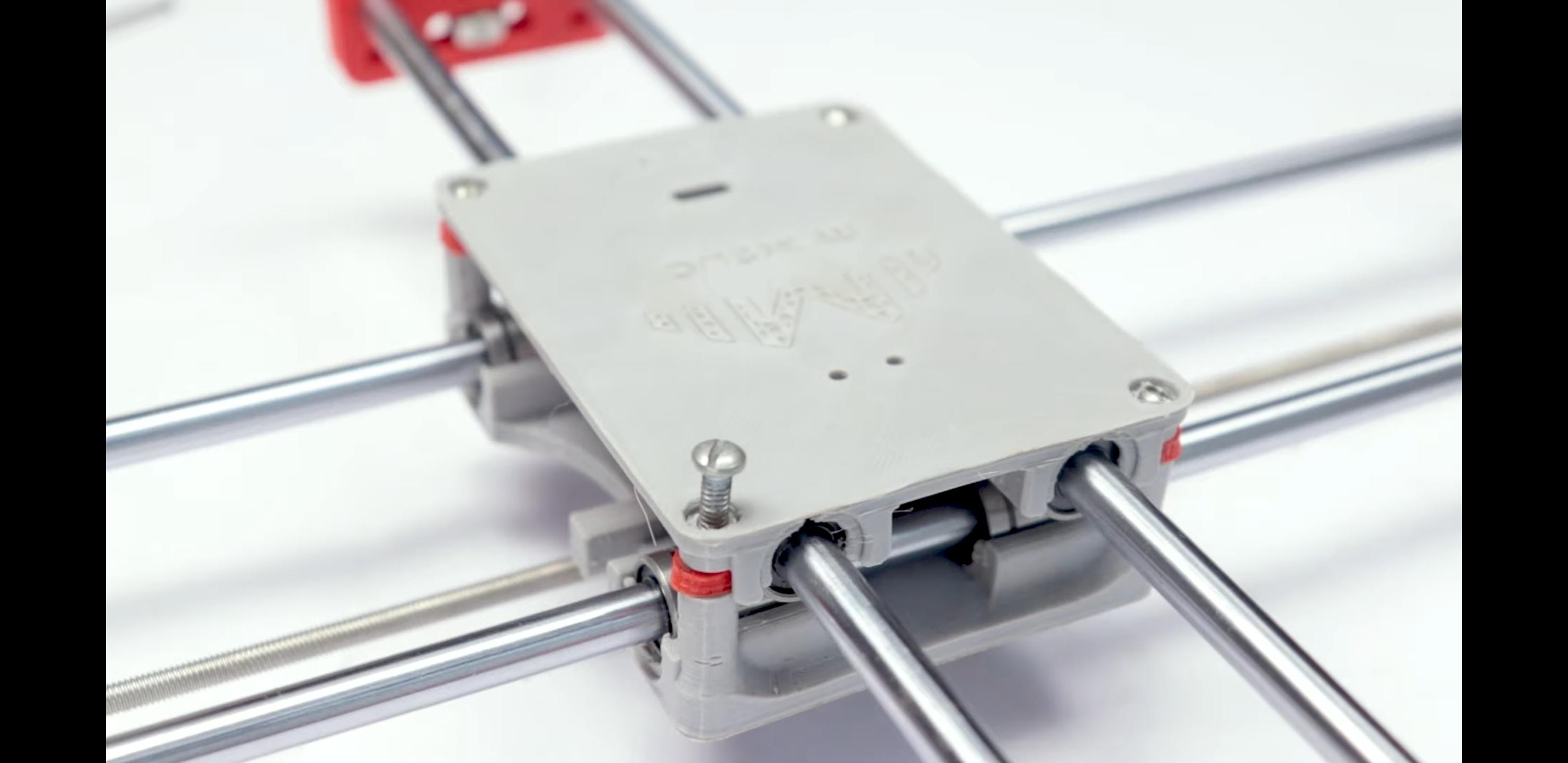
Y-Back
- Pegue as (2) hastes lineares de 350 mm e insira-as na peça em Y usando um macete de borracha
- Obtenha (1) parafuso M4-0,5 x 35, (1) porca M4 e o 5º rolamento 624zz
- Obtenha (2) parafusos M3-0,5 x 16 para fixar as hastes lineares
- Deslize o rolamento ao inserir o parafuso através da peça Y-back
Y-Front
- Deslize as hastes lineares / peça traseira em Y através dos rolamentos do LM8UU e prenda a peça frontal em Y usando um macete de borracha
Etapa 6:monte o eixo X-Y (correia)
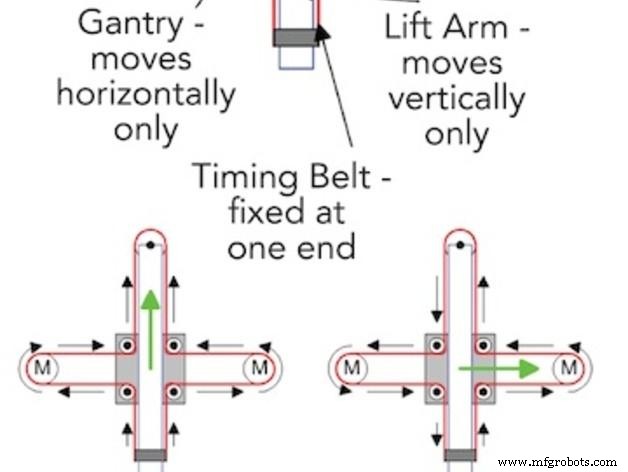

- Use um alicate de bico fino para ajudar a guiar a correia GT2 mais facilmente através da garra
- Pegue as duas pontas da correia e deslize-as através dos “dentes” do controle deslizante da base
- O cinto deve ser apertado e não frouxo
- Observe que, uma vez que o cinto GT2 está colocado, é normal que a garra não se mova facilmente
Etapa 7:monte o eixo Z

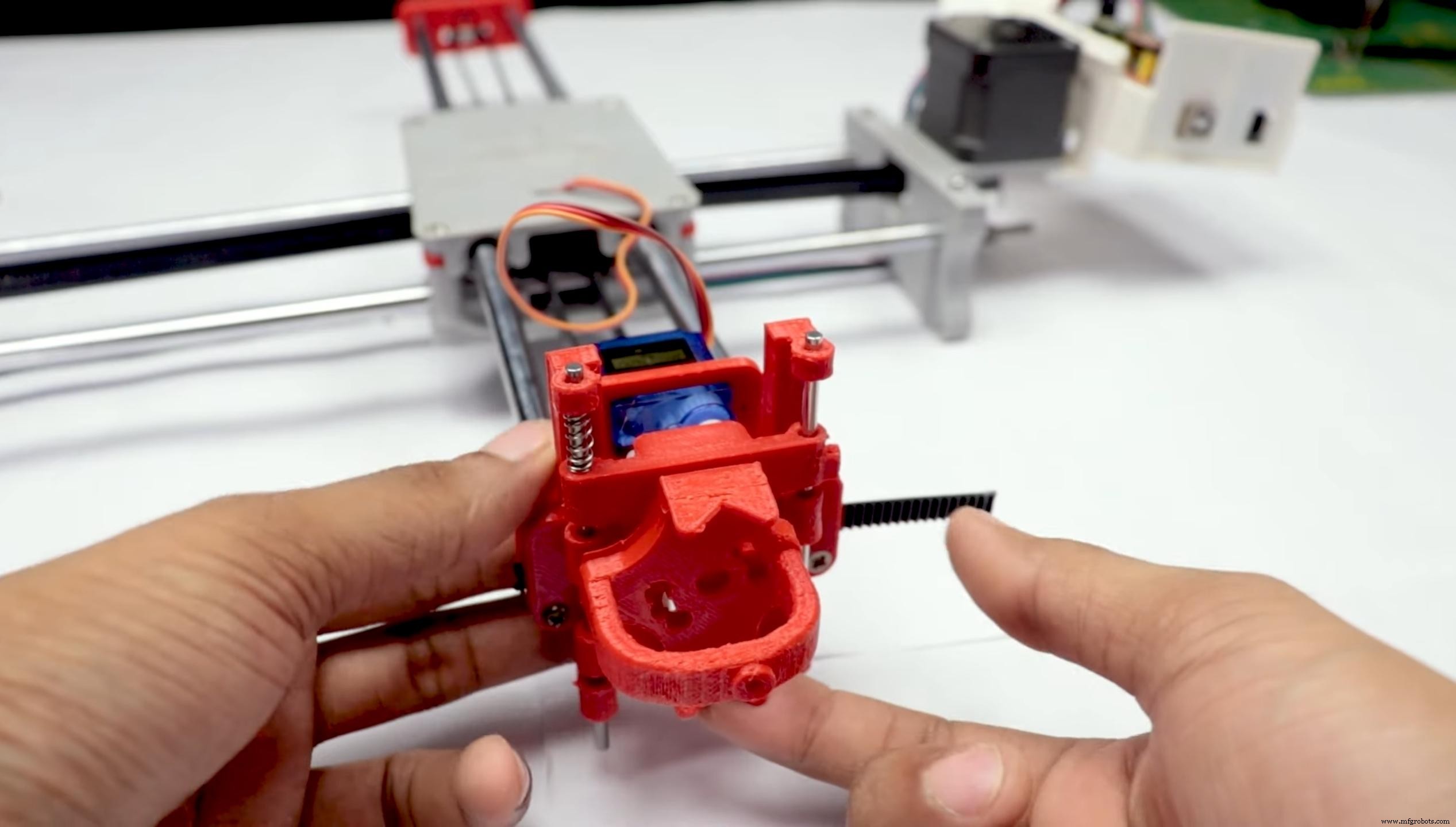
- Obtenha (2) hastes lineares de 3 mm e as seguintes peças impressas em 3D (controle deslizante, suporte para caneta, base deslizante, parafuso de aperto métrico 3 MM)
- Obtenha o (1) parafuso hexagonal M3-0,5 x 20mm e o parafuso de aperto manual métrico e empurre-os um contra o outro. Use supercola para mantê-los juntos.
- Obtenha (3) parafusos M3-0,5 x 16 mm que você usará para prender a base deslizante à parte frontal em Y. Você pode precisar usar (3) porcas M3-0.5 para mantê-lo no lugar
- Empurre o controle deslizante e o suporte para caneta juntos para fazer uma peça
- Agora pegue aquela nova peça e as (2) hastes lineares de 3 mm e deslize as hastes pelos orifícios. Coloque uma pequena mola entre as duas partes para que haja um pouco de pressão para levantar o controle deslizante. Pode ser necessário cortar um pouco a mola até que haja uma quantidade adequada de pressão no controle deslizante.
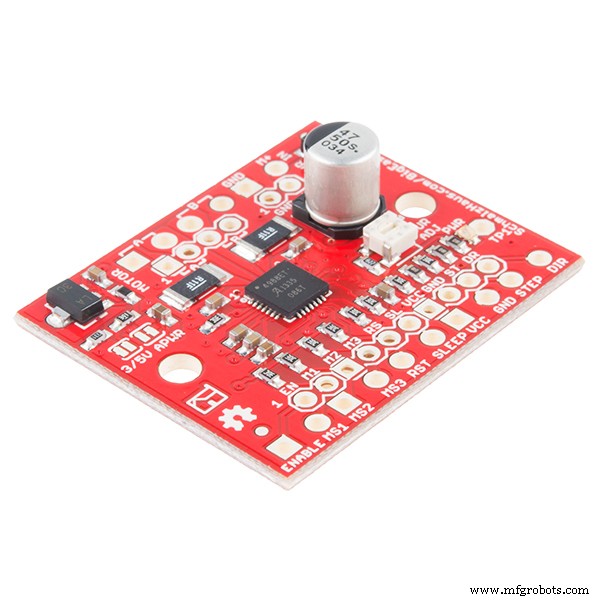
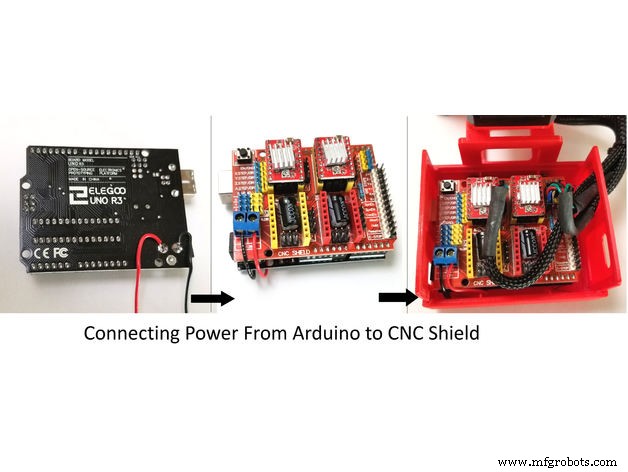
Etapa 8:ELETRÔNICA
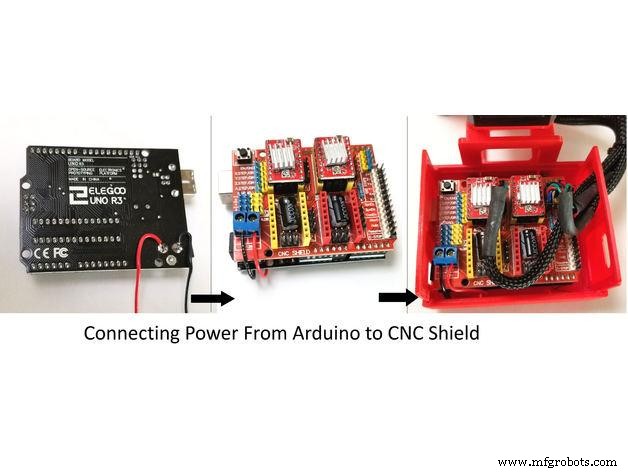
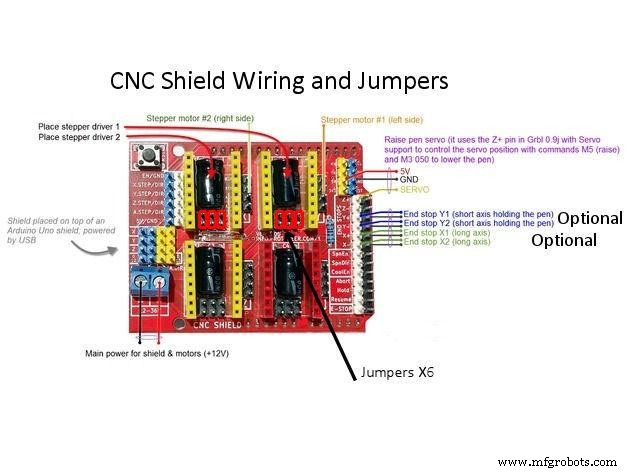

ELETRÔNICOS
Eu prefiro que você possa usar o Arduino uno CNC Shield
Pronto para todo o seu circuito
1) 4pcs A4988 Stepper Motor Driver
2) Driver da placa de expansão A4988
3) Arduino UNO Em primeiro lugar, acerte o coletor e coloque o driver do motor A4988.
4pcs A4988 Stepper motor driver conecte na placa de expansão A4988 driver módulo, em seguida, conecte o arduino com placa de expansão e conecte toda a fiação. faria, podemos fazer os motores se moverem em 1/16 ou 1/32 de passo para fazer o laser se mover com a máxima precisão possível. No entanto, os motores vão consumir mais eletricidade:eles vão esquentar mais rápido.
Para usar os modos de micro stepping, coloque alguns dos pinos de modo em curto. Combinações diferentes fornecem resoluções diferentes. Dê uma olhada no gráfico para as diferentes configurações possíveis. Quando a blindagem estiver programada, adicione os drivers A4988 a ela e conecte o restante dos componentes eletrônicos.
Para encontrar as bobinas dos motores de passo, use um multímetro. Se houver resistência entre os dois fios, você tem uma bobina. No esquema, as bobinas são representadas por dois fios da mesma cor.
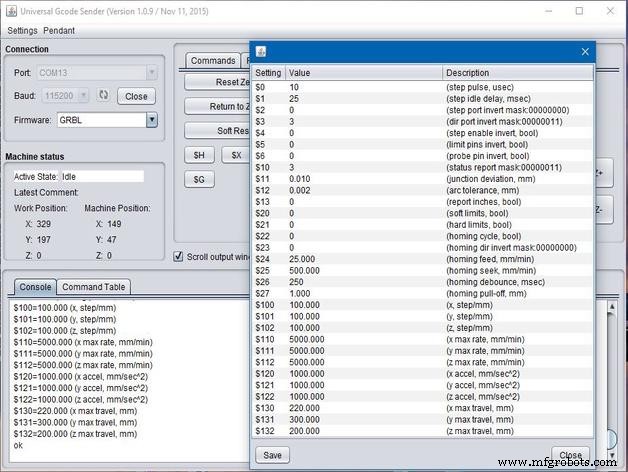
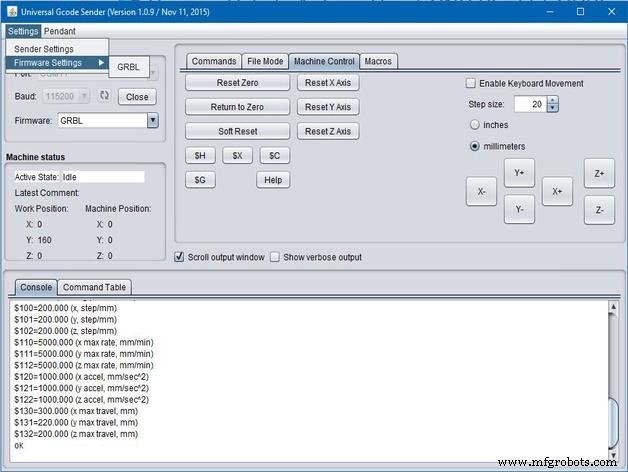
Etapa 9:SOFTWARE
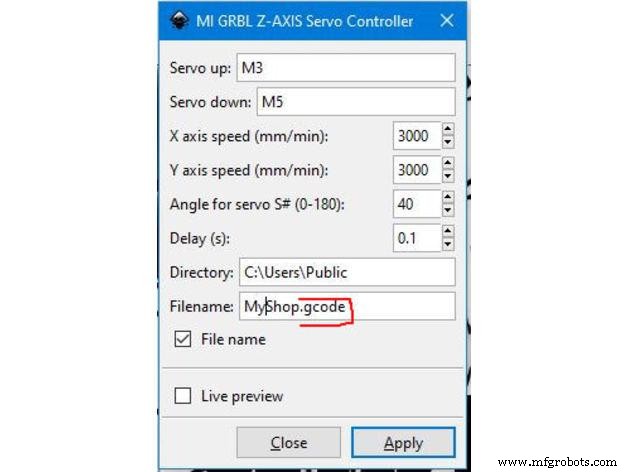
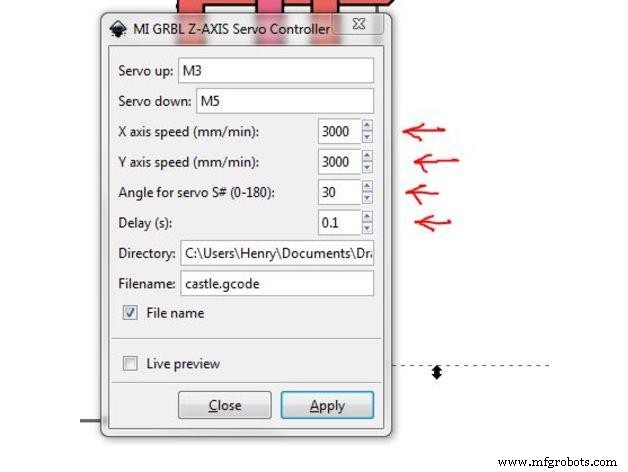
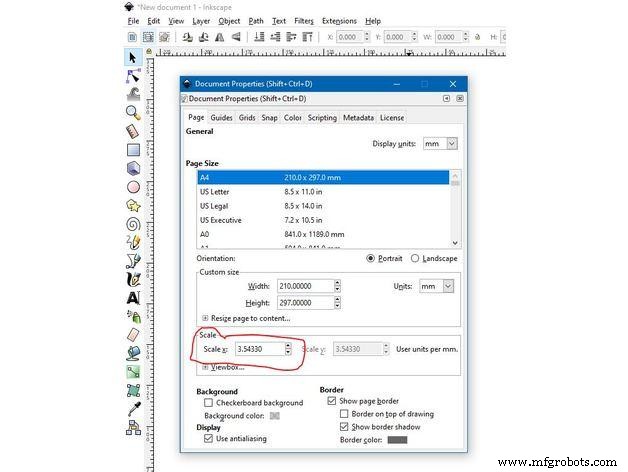
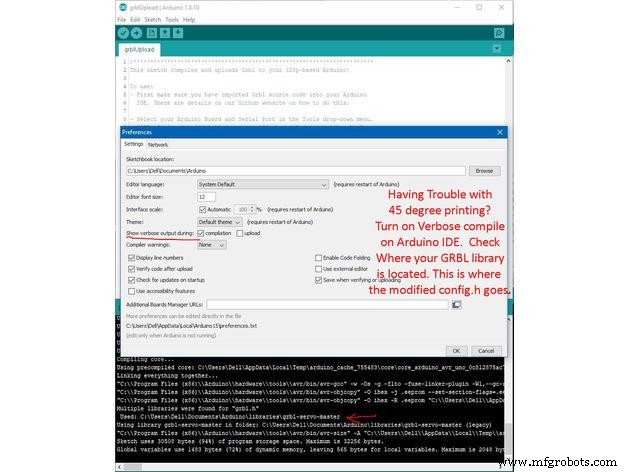
Inkscape, que é o software de design gráfico (desenhar ou importar gráficos)
Inkscape MI GRBL Extension (converter gráficos para código G) Universal G Code Sender (enviar o código G para o robô causando movimento de desenho) GRBL que é o firmware do Arduino (programado no Arduino Uno)
Arduino:https://www.arduino.cc/en/software
Remetente universal do código G:https://winder.github.io/ugs_website / ...
Inkscape:https://inkscape.org/release/inkscape ..
4xiDraw &km laser:https://drive.google.com/file/d/1YO8 -...
Processando:https://processing.org/download/
desenho para processamento de código G:https://drive.google.com/file/d/1PIFx ...
assista ao vídeo para configuração completa
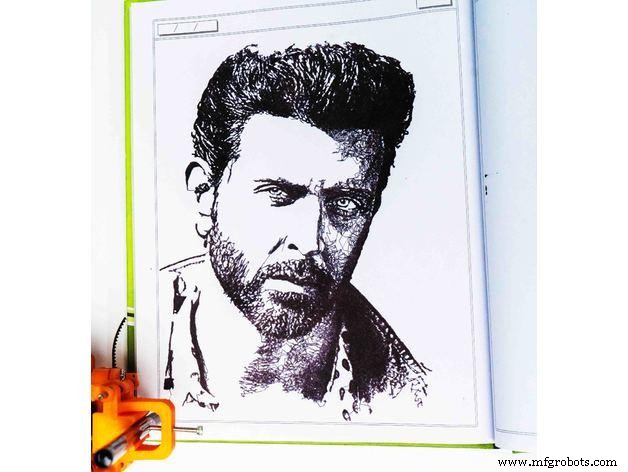
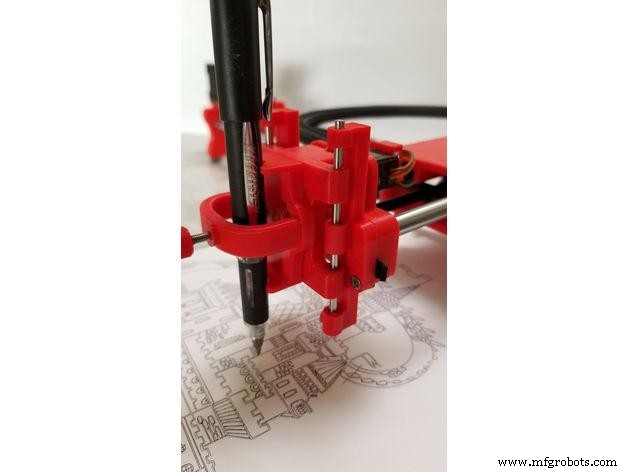
Etapa 10:Máquina de desenho no trabalho
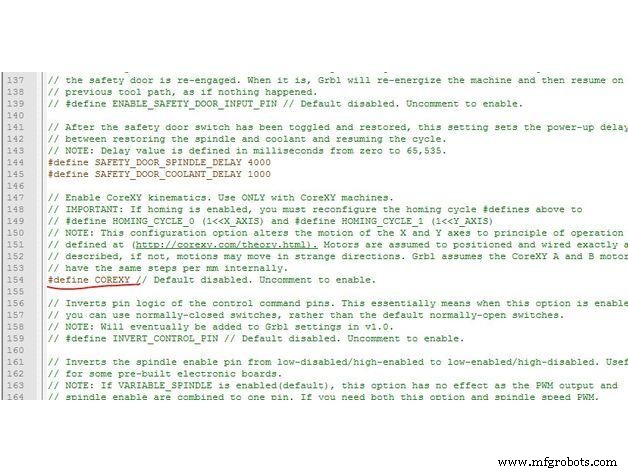
Código
- código grbl
código grbl Arduino
/ ********************************************** ************************* Este esboço compila e carrega Grbl para seu Arduino baseado em 328p! Para usar:- Primeiro, certifique-se de ter importado o código-fonte Grbl para o seu Arduino IDE. Há detalhes em nosso site do Github sobre como fazer isso. - Selecione a placa Arduino e a porta serial no menu suspenso Ferramentas. NOTA:Grbl só suporta oficialmente Arduinos baseados em 328p, como o Uno. O uso de outros painéis provavelmente não funcionará! - Em seguida, basta clicar em 'Enviar'. É isso! Para usuários avançados:se você gostaria de ver o que mais o Grbl pode fazer, existem algumas opções adicionais de personalização e recursos que você pode ativar ou desativar. Navegue em seu sistema de arquivos para onde o Arduino IDE armazenou os arquivos de código-fonte Grbl, abra o arquivo 'config.h' em seu editor de texto favorito. Dentro, há dezenas de descrições de recursos e # define. Simplesmente comente ou descomente o #defines ou altere seus valores atribuídos, salve suas alterações e então clique em 'Carregar' aqui. Copyright (c) 2015 Sungeun K. JeonReleased sob a licença MIT. Veja license.txt para detalhes. ******************************************* ***************************** / # include// Não altere este arquivo!
Esquemas
Processo de manufatura
- Robô seguidor de linha
- Plataforma de treinamento Arduino
- Robô assistente autônomo da casa
- Máquina CNC
- Braço do robô Arduino DIY - Controlado por gestos manuais
- Monitor doméstico
- Como fazer um mini osciloscópio em casa usando o Arduino Nano
- Ideia DIY com RFID
- Máquina de garra caseira
- Plotadora Arduino CNC (Máquina de desenho)