


Robô seguidor de linha
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Aplicativos e serviços online
 |
|
Sobre este projeto
Vamos fazer um robô totalmente autônomo usando sensores Arduino e IR. Ele pode seguir uma linha preta na superfície branca. Assista ao vídeo para mais!
Componentes usados:
- Pedaço de papelão / folha de acrílico
- Arduino Uno
- sensor IR
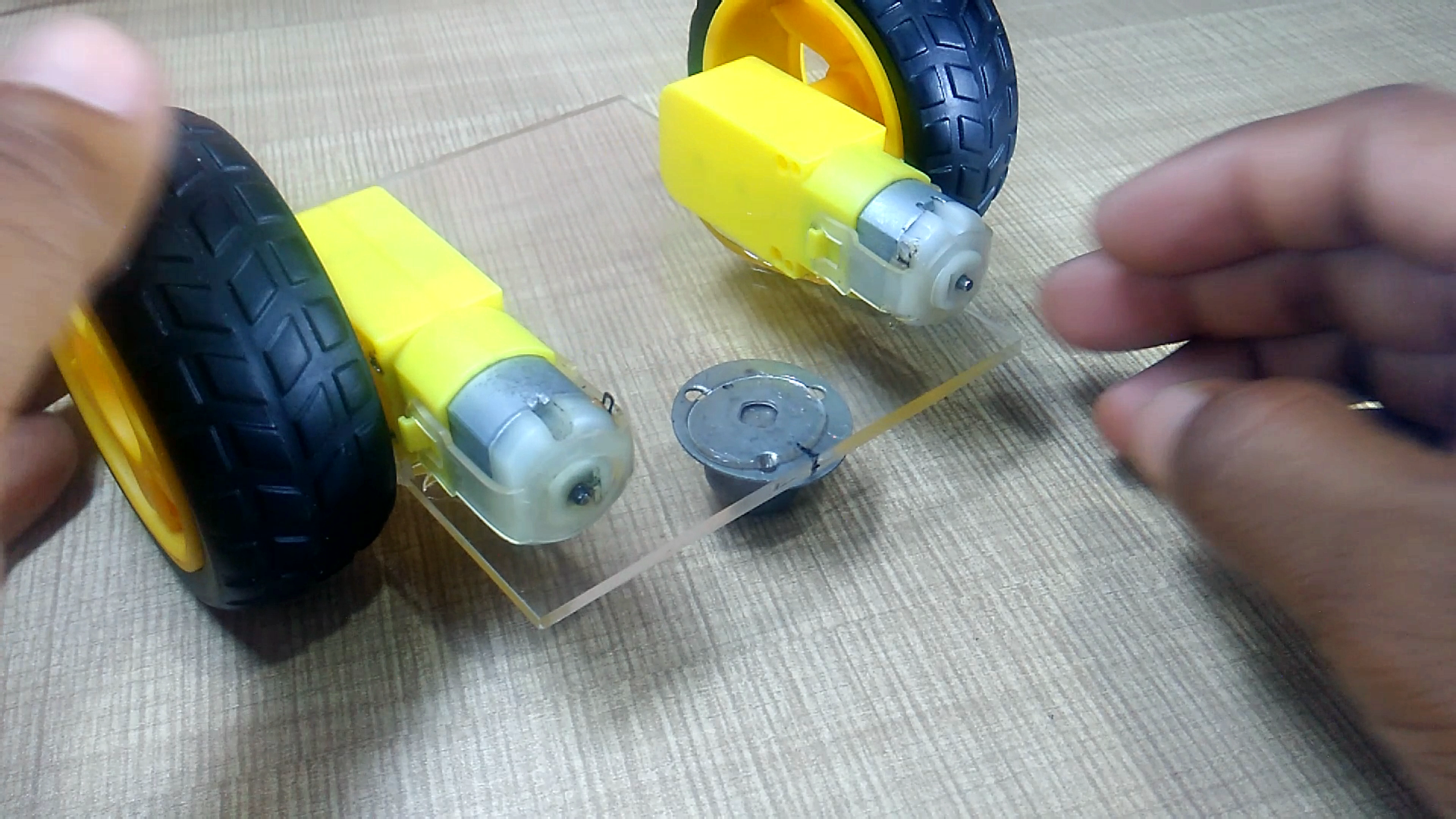
- motor BO
- rodas
- Roda giratória
- L293d IC
- PCB
- Fio flexível
- Bateria
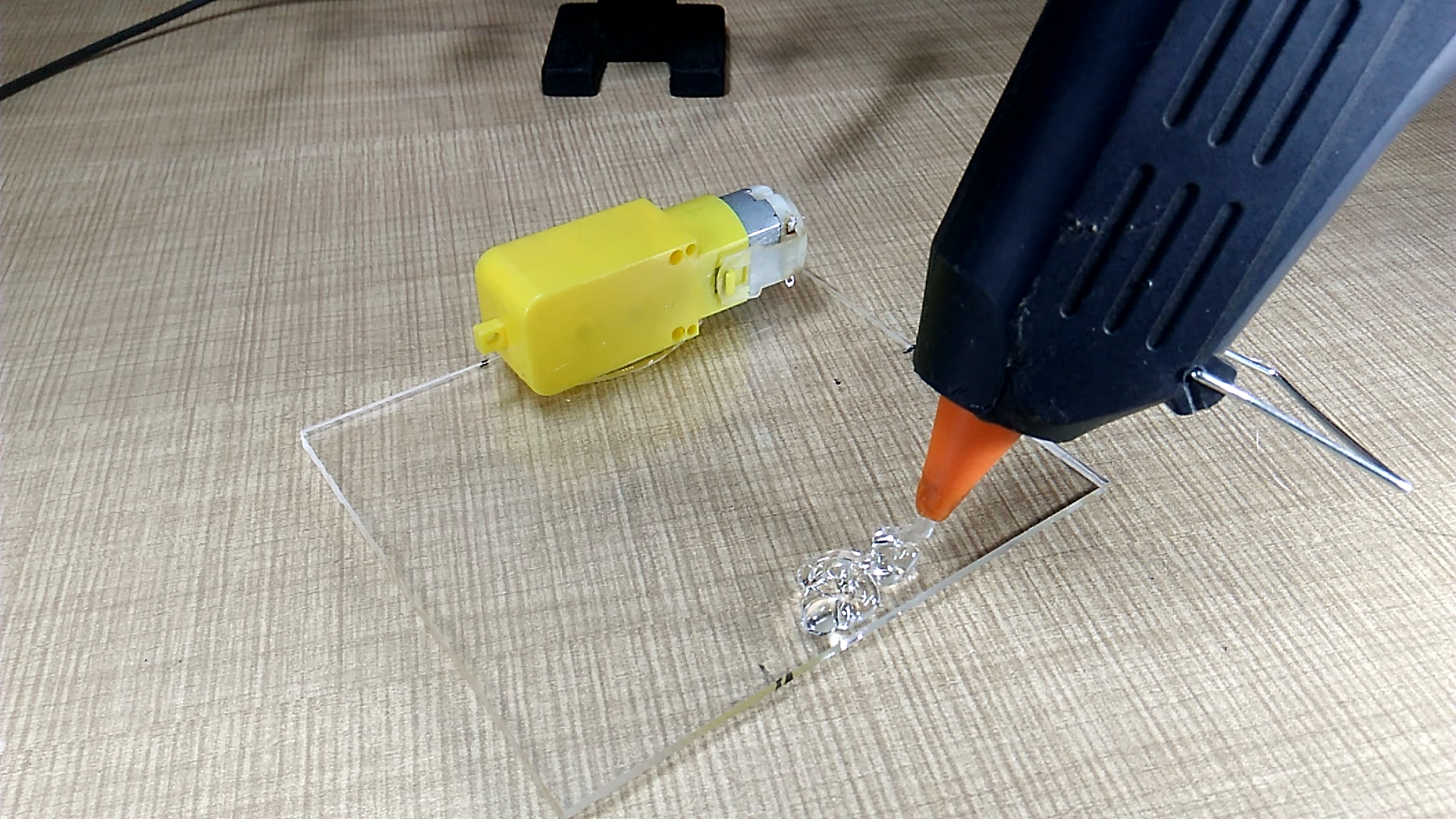
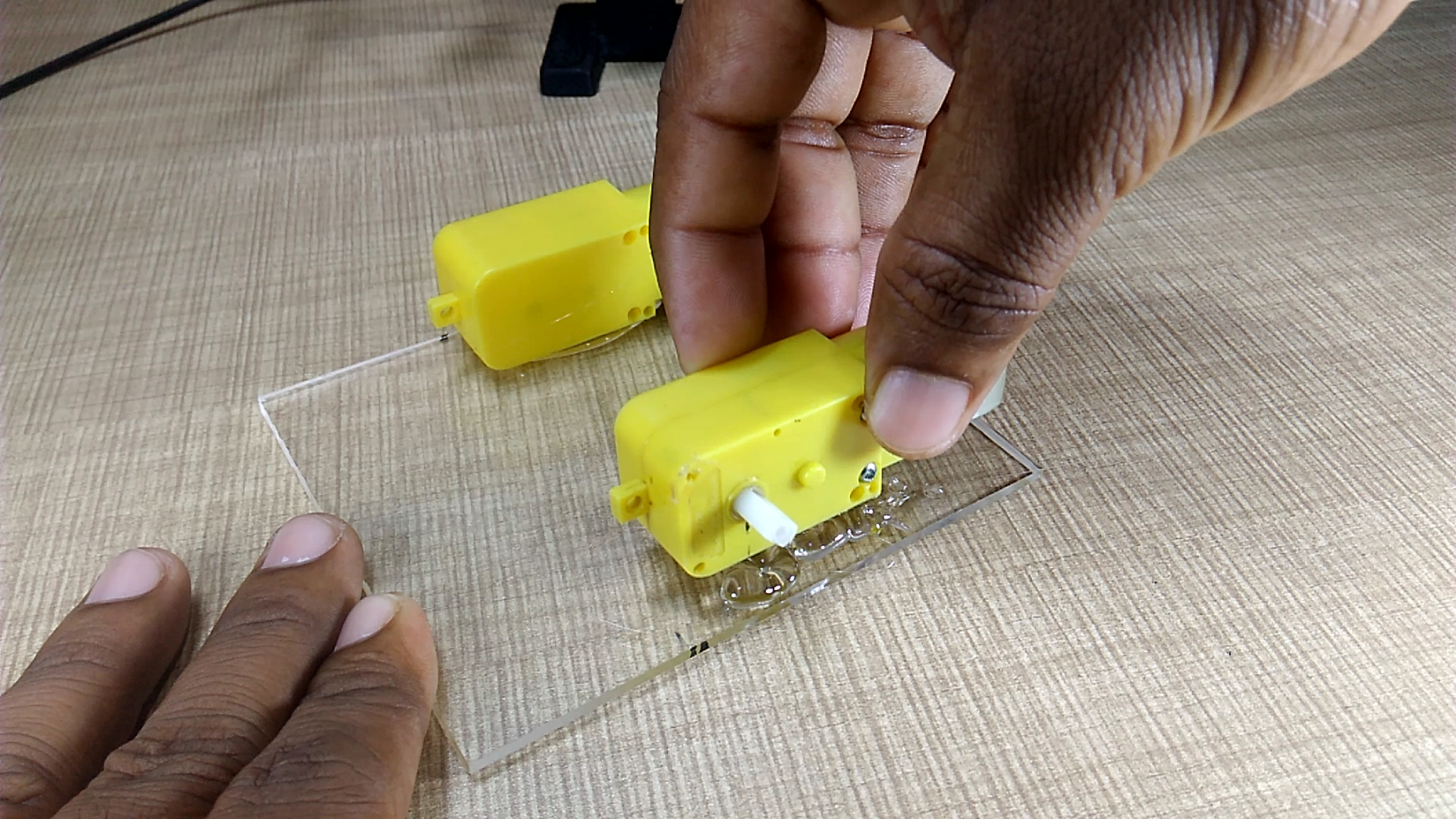
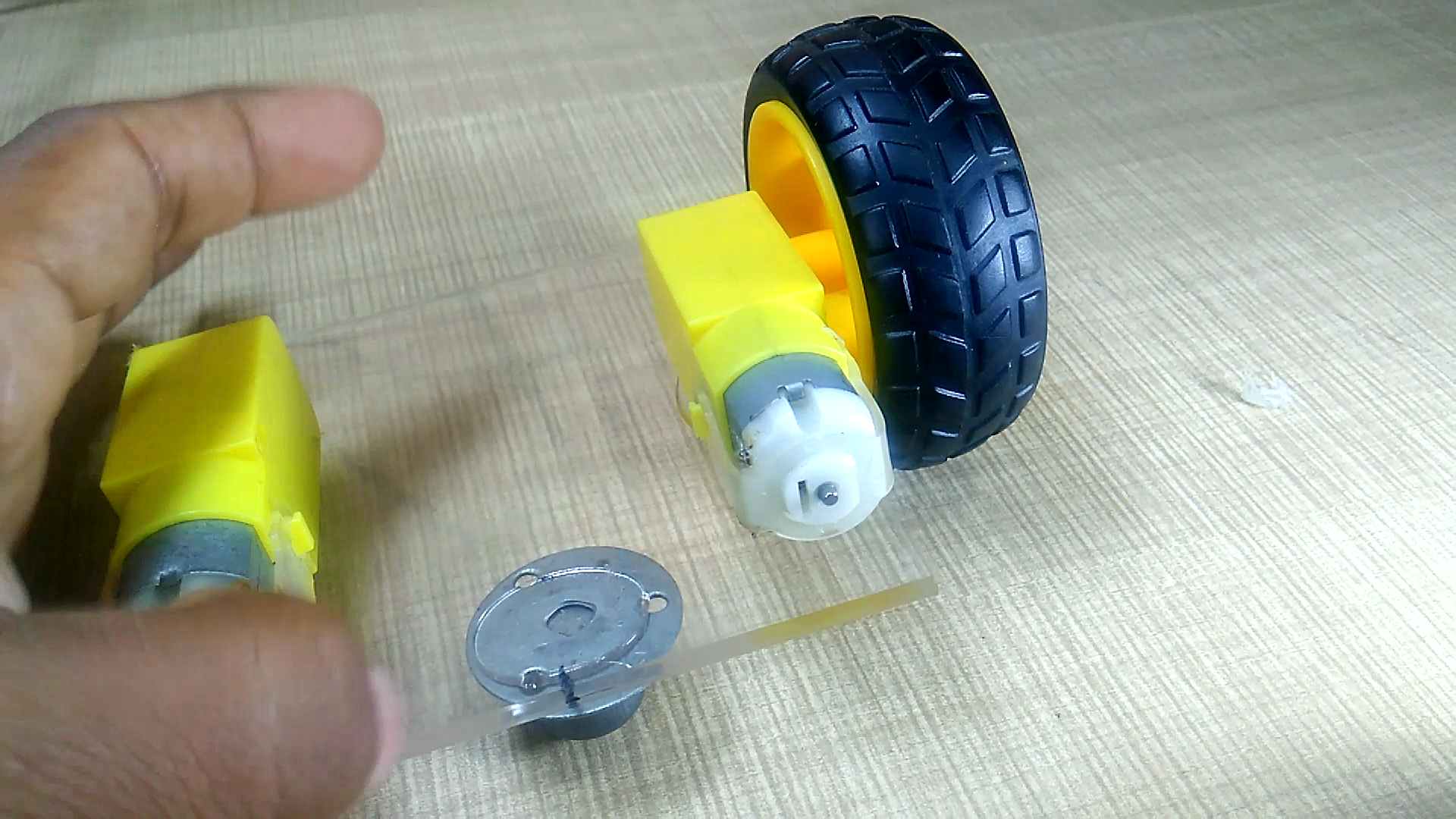
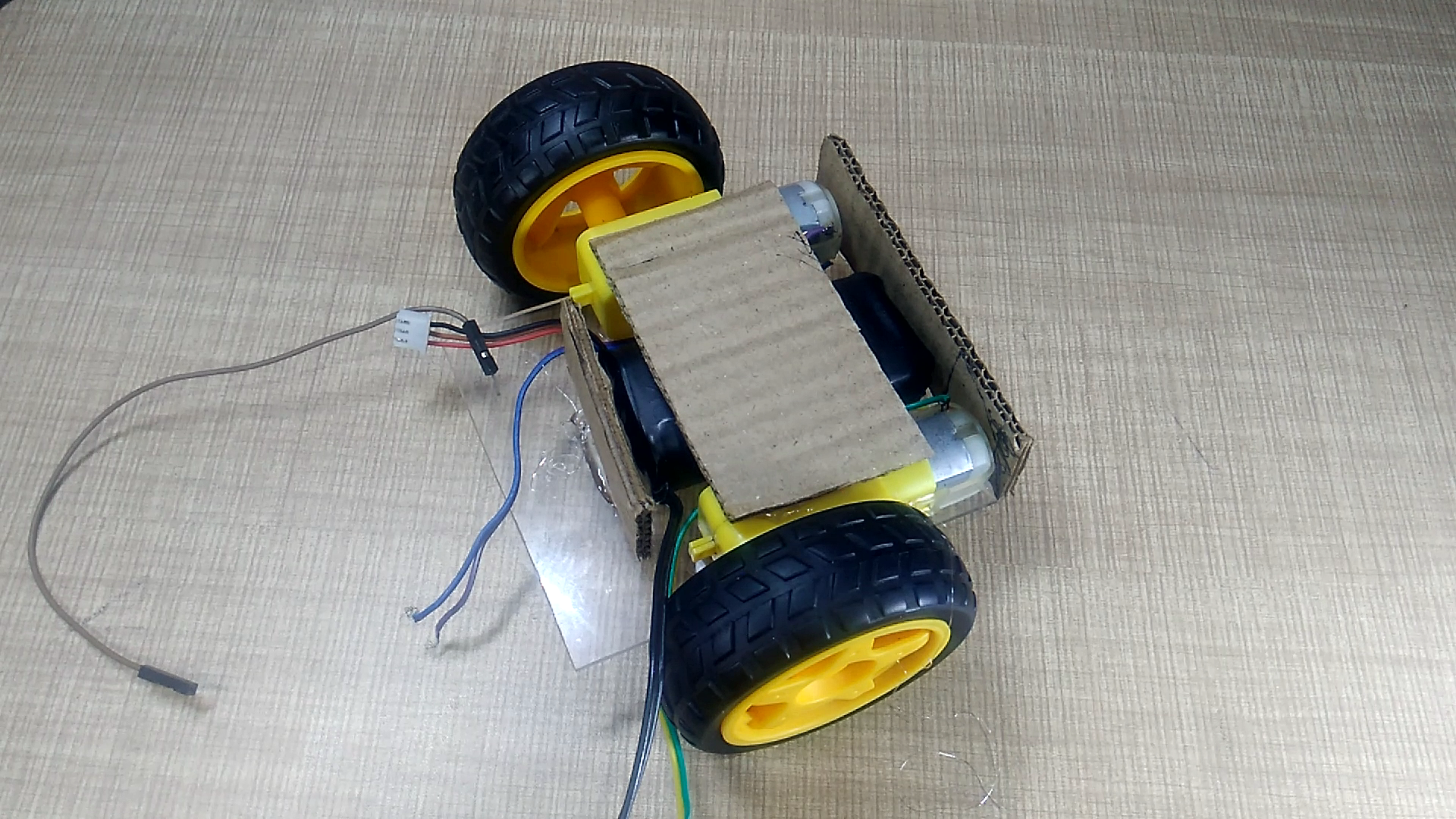
Fixe todos os componentes na chapa de acrílico e faça um chassi como mostrado nas fotos.


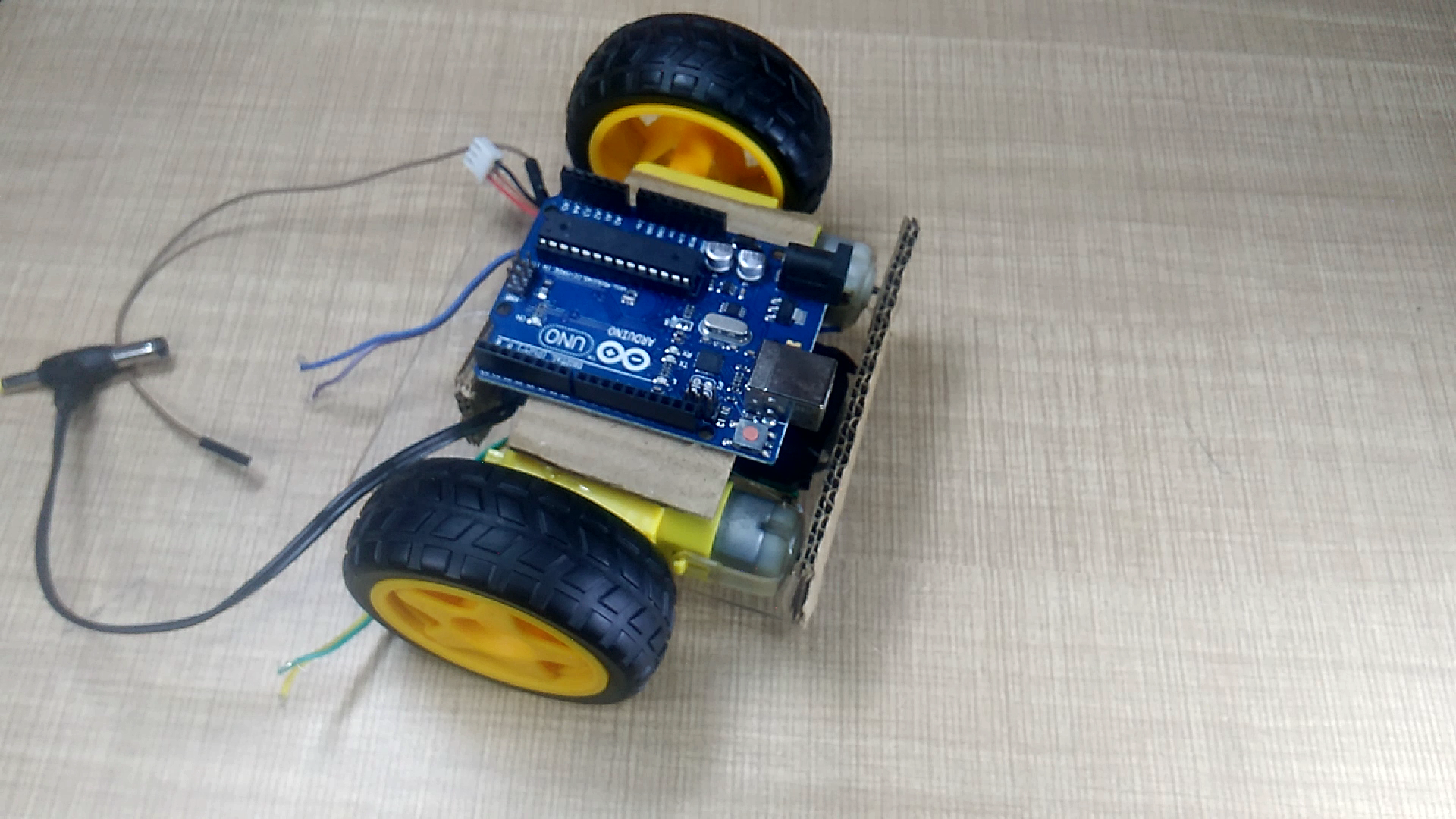

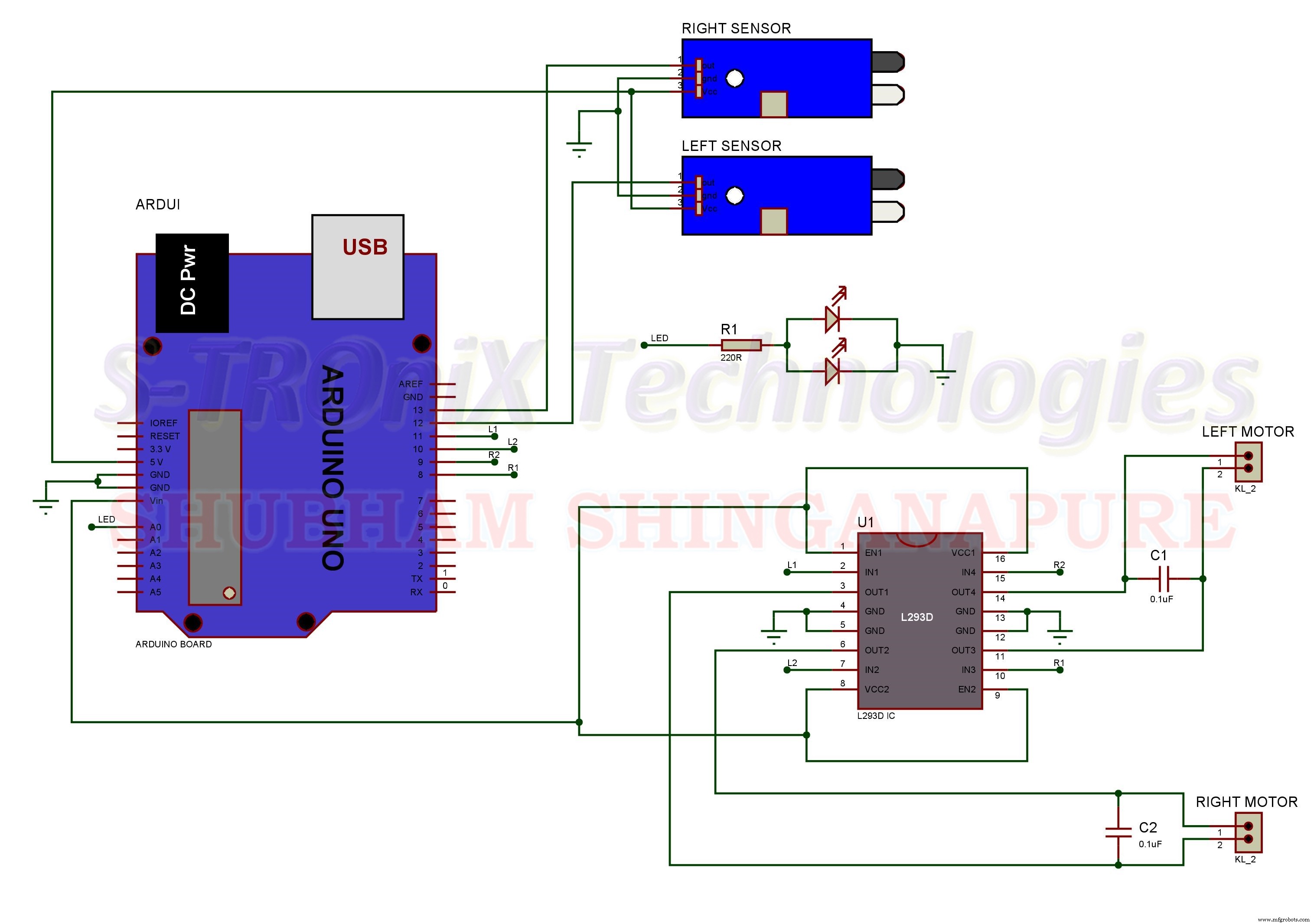
Agora faça todas as conexões de acordo com o diagrama de circuito abaixo.
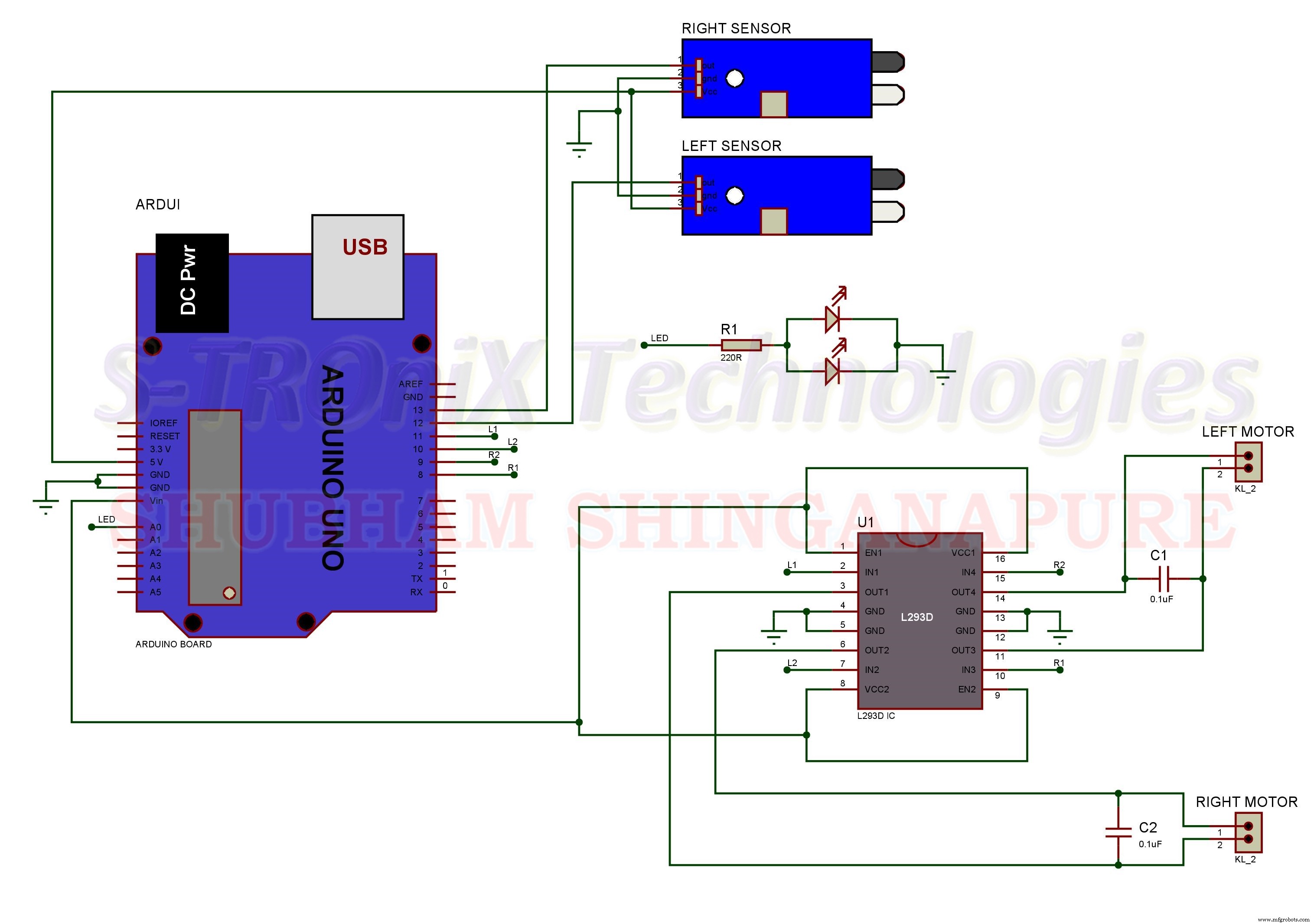
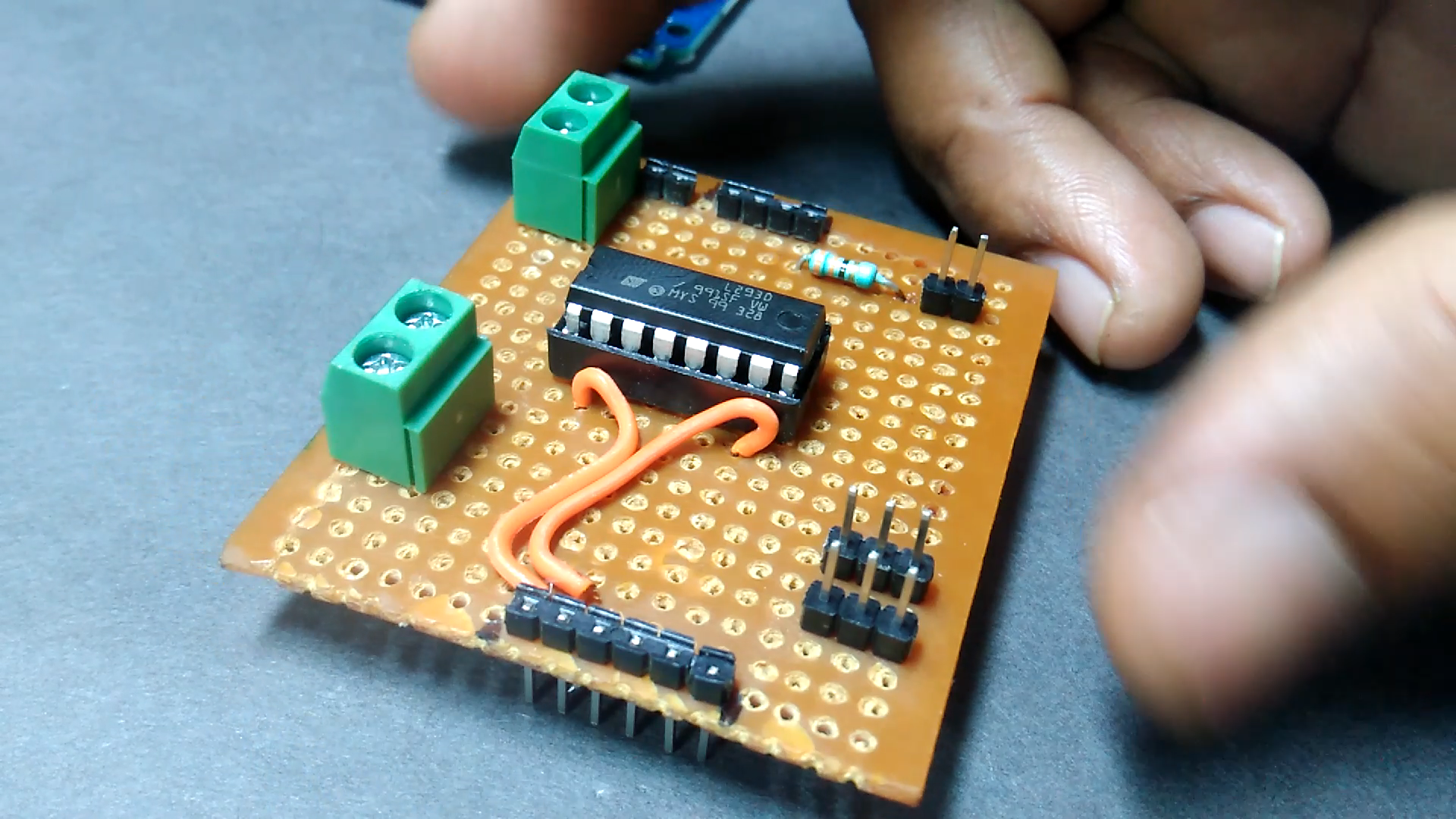
você pode fazer este circuito em um pcb pontilhado como este.
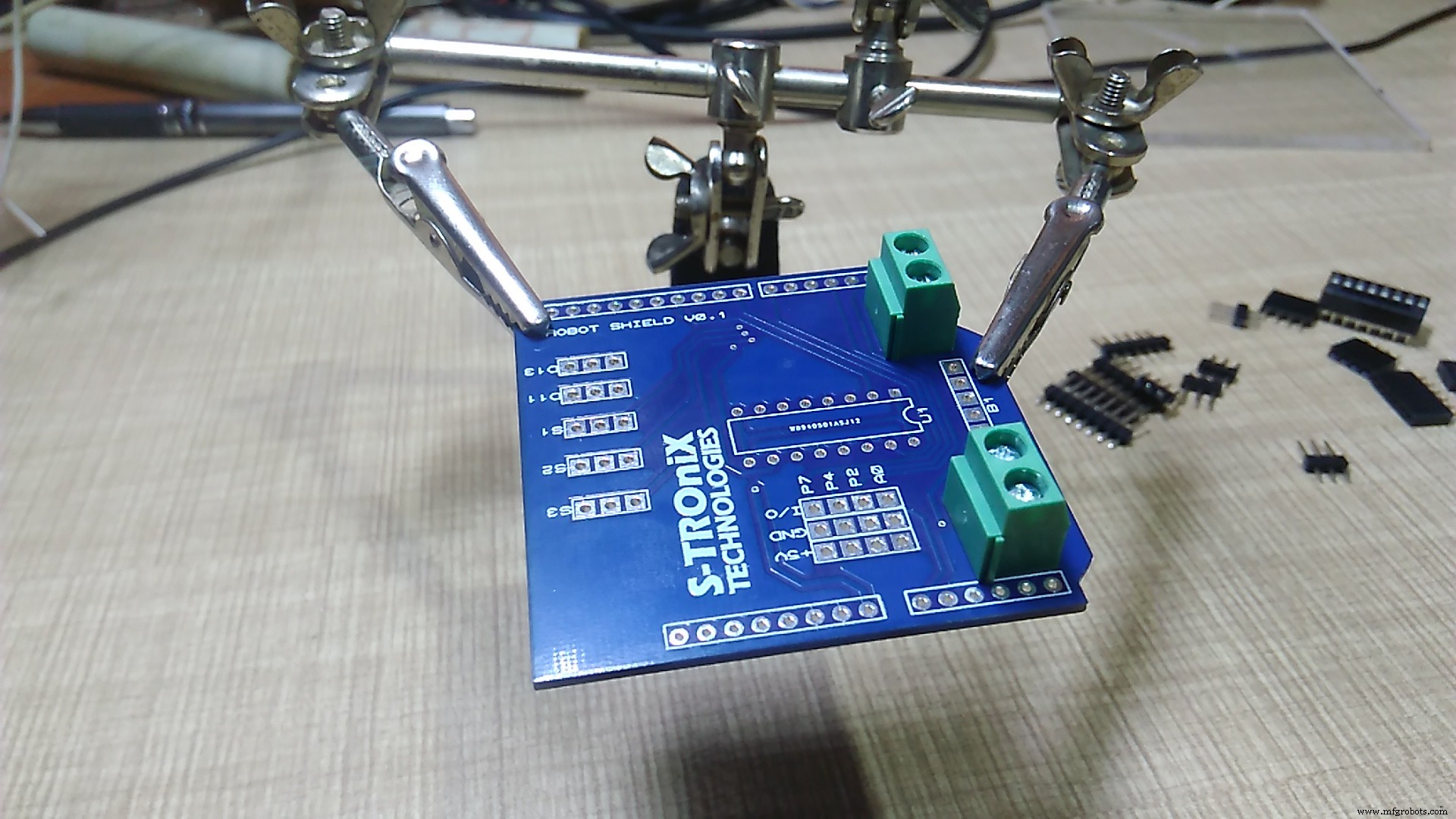
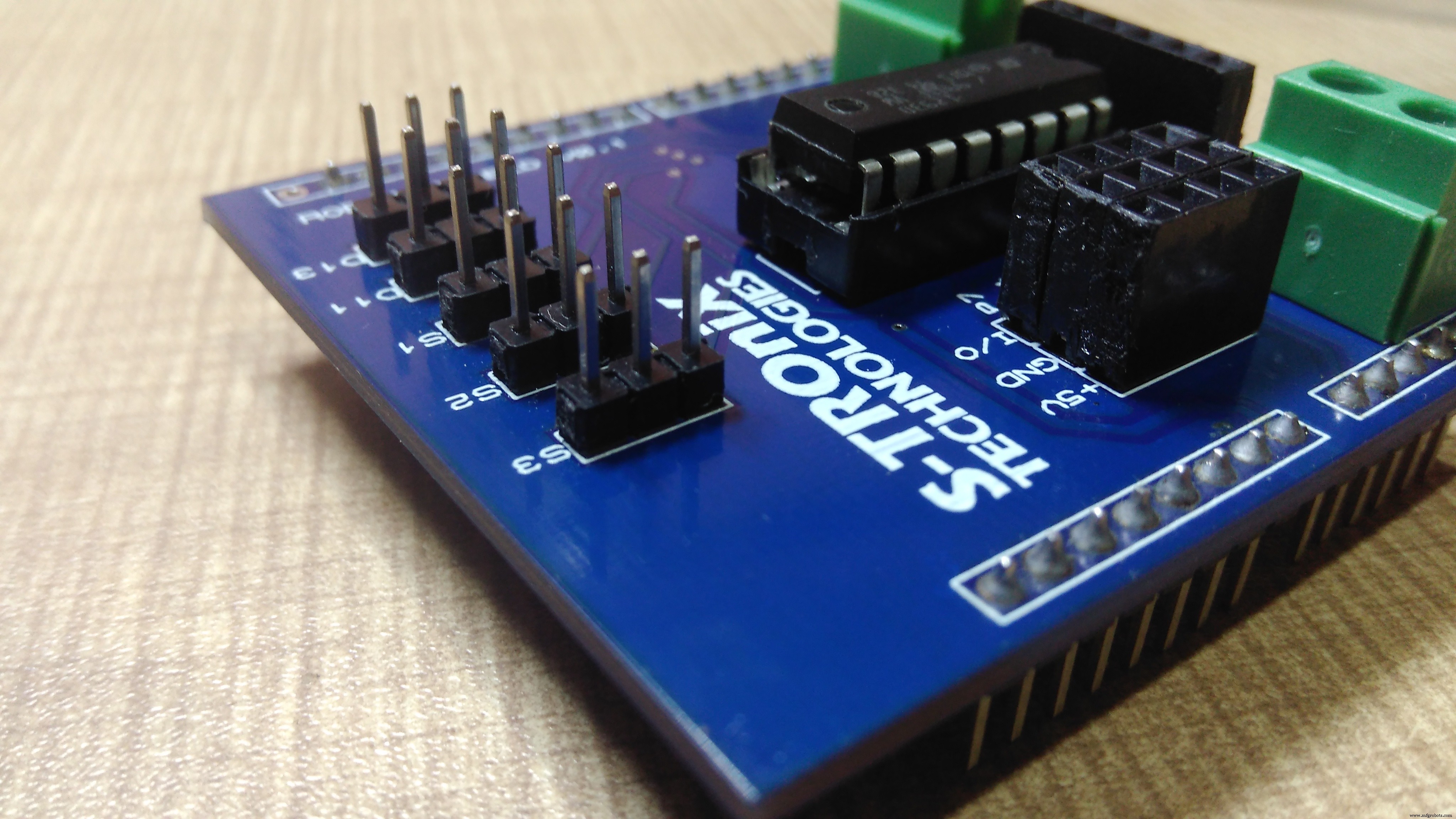
ou pode usar este tipo de PCB com aparência profissional.
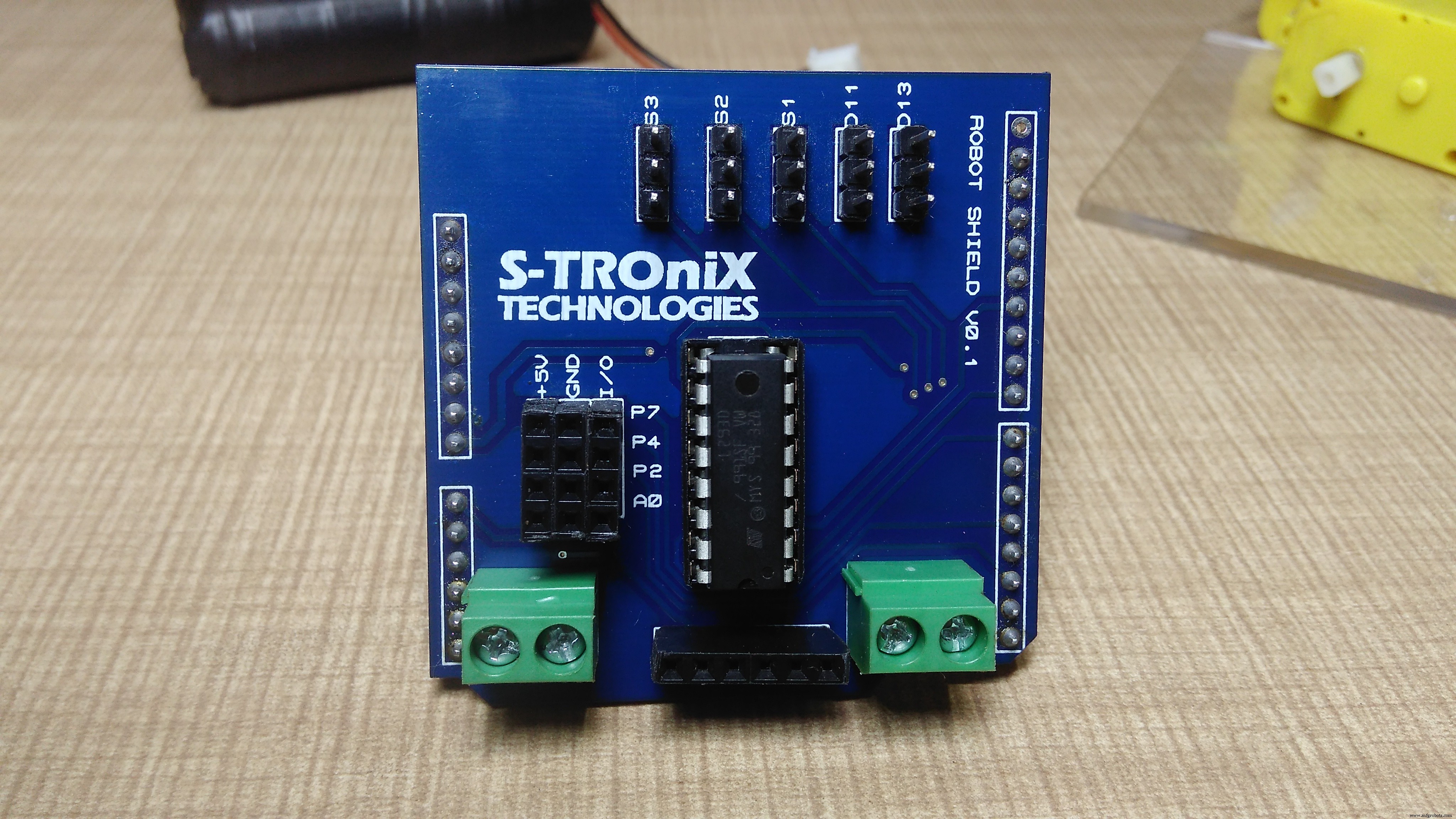
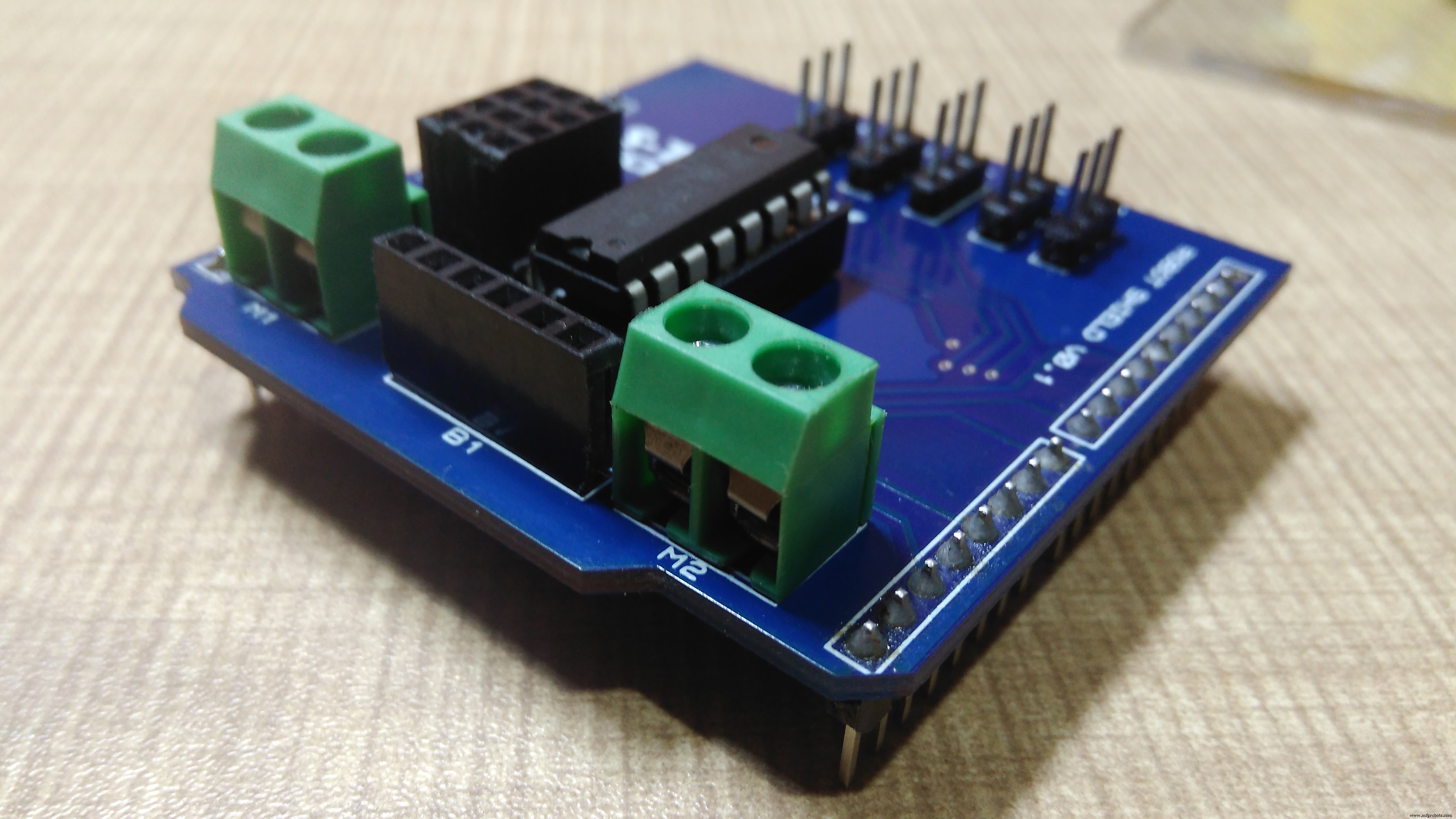
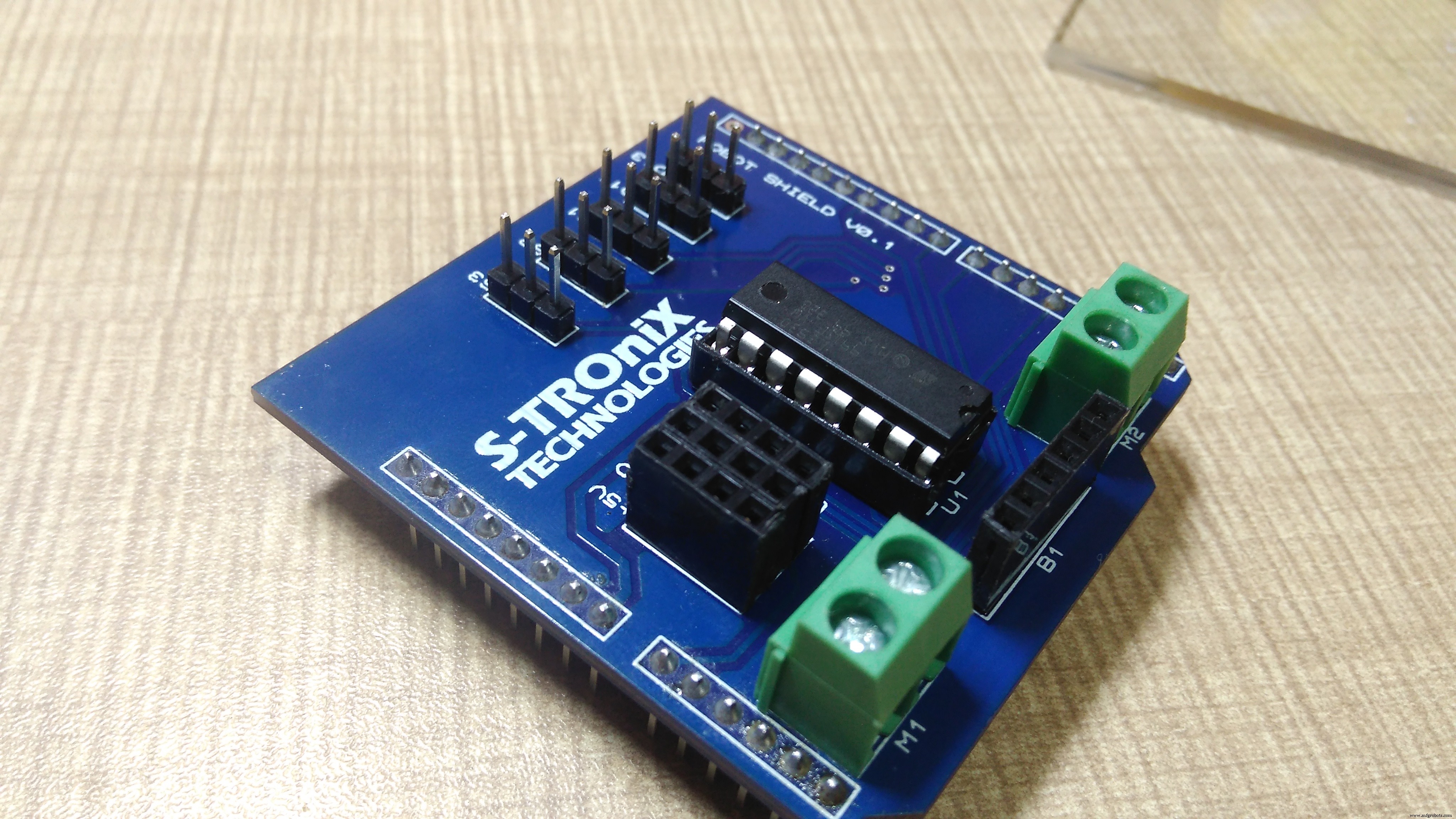
você pode solicitar PCB para este escudo aqui https://www.pcbway.com/project/shareproject/How_to_Make_Arduino_Based_Edge_Avoiding_Robot.html
ou para blindagem pronta, entre em contato conosco em:https://www.facebook.com/STROniXTechnologies
Agora é hora de programar este robô. carregue este programa para o arduino e pronto.
// programa de Shubham Shinganapure em 05-08-2019
//
// para o robô que segue a linha usando sensores 2IR
int lm1 =8; // saída do motor esquerdo 1
int lm2 =9; // saída do motor esquerdo 2
int rm1 =10; // saída do motor direito 1
int rm2 =11; // saída do motor direito 2
int sl =13; // entrada do sensor 1 (esquerda)
int sr =12; // entrada do sensor 2 (direita)
int SlV =0;
int SrV =0;
int led =A0;
configuração vazia ()
{
pinMode (lm1, OUTPUT);
pinMode (lm2, OUTPUT);
pinMode (rm1, OUTPUT);
pinMode (rm2, OUTPUT);
pinMode (led, OUTPUT);
pinMode (sl, INPUT);
pinMode (sr, INPUT);
sTOP ();
}
void loop ()
{
SlV =digitalRead (sl);
SrV =digitalRead (sr);
if (SrV ==LOW &&SlV ==LOW)
{
ForWard ( );
}
if (SrV ==HIGH &&SlV ==LOW)
{
Left ();
}
if (SrV ==LOW &&SlV ==HIGH)
{
Right ();
}
if (SrV ==HIGH &&SlV ==HIGH)
{
sTOP ();
}
}
void ForWard ()
{
digitalWrite (lm1, HIGH);
digitalWrite (lm2, LOW);
digitalWrite (rm1, HIGH);
digitalWrite (rm2, LOW);
}
vazio BackWard ()
{
digitalWrite (lm1, LOW);
digitalWrite (lm2, HIGH);
digitalWrite (rm1, LOW);
digitalWrite (rm2, HIGH);
}
vazio à esquerda ()
{
digitalWrit e (lm1, LOW);
digitalWrite (lm2, HIGH);
digitalWrite (rm1, HIGH);
digitalWrite (rm2, LOW);
}
vazio Right ()
{
digitalWrite (lm1, HIGH);
digitalWrite (lm2, LOW);
digitalWrite (rm1, LOW);
digitalWrite (rm2, HIGH) );
}
void sTOP ()
{
digitalWrite (lm1, LOW);
digitalWrite (lm2, LOW);
digitalWrite (rm1, BAIXO);
digitalWrite (rm2, BAIXO);
} Para mais inscreva-se no meu canal do youtube:
Código
- robô seguidor de linha
robô seguidor de linha Arduino
// programa de Shubham Shinganapure em 05-08-2019 //// para o Robô Seguidor de Linha usando sensores 2IR int lm1 =8; // saída do motor esquerdo 1int lm2 =9; // saída do motor esquerdo 2int rm1 =10; // saída do motor direito 1int rm2 =11; // saída do motor direito 2int sl =13; // sensor 1 input (left) int sr =12; // entrada do sensor 2 (direita) int SlV =0; int SrV =0; int led =A0; void setup () {pinMode (lm1, OUTPUT); pinMode (lm2, OUTPUT); pinMode (rm1, OUTPUT); pinMode (rm2, OUTPUT); pinMode (led, OUTPUT); pinMode (sl, INPUT); pinMode (sr, INPUT); sTOP ();} void loop () {SlV =digitalRead (sl); SrV =digitalRead (sr); if (SrV ==LOW &&SlV ==LOW) {ForWard (); } if (SrV ==HIGH &&SlV ==LOW) {Left (); } if (SrV ==LOW &&SlV ==HIGH) {Right (); } if (SrV ==HIGH &&SlV ==HIGH) {sTOP (); }} void ForWard () {digitalWrite (lm1, HIGH); digitalWrite (lm2, LOW); digitalWrite (rm1, HIGH); digitalWrite (rm2, LOW); } void BackWard () {digitalWrite (lm1, LOW); digitalWrite (lm2, HIGH); digitalWrite (rm1, LOW); digitalWrite (rm2, HIGH); } void Left () {digitalWrite (lm1, LOW); digitalWrite (lm2, HIGH); digitalWrite (rm1, HIGH); digitalWrite (rm2, LOW); } void Right () {digitalWrite (lm1, HIGH); digitalWrite (lm2, LOW); digitalWrite (rm1, LOW); digitalWrite (rm2, HIGH); } void sTOP () {digitalWrite (lm1, LOW); digitalWrite (lm2, LOW); digitalWrite (rm1, LOW); digitalWrite (rm2, LOW); } Esquemas
Processo de manufatura
- Robô Raspberry Pi controlado por Bluetooth
- Robô Pi Simples
- Obstáculos para evitar o robô com servo motor
- Joy Robot (Robô Da Alegria)
- Robô seguidor de linha de velocidade V4
- Robô controlado por fala
- Robô de piano controlado por Arduino:PiBot
- Plataforma de treinamento Arduino
- Robô assistente autônomo da casa
- Robô para navegação interna supercool