


Reaproveitar controles remotos antigos
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Sobre este projeto
Este projeto permite que você reutilize controles remotos excedentes de videocassetes, TV, reprodutores de DVD antigos, etc.

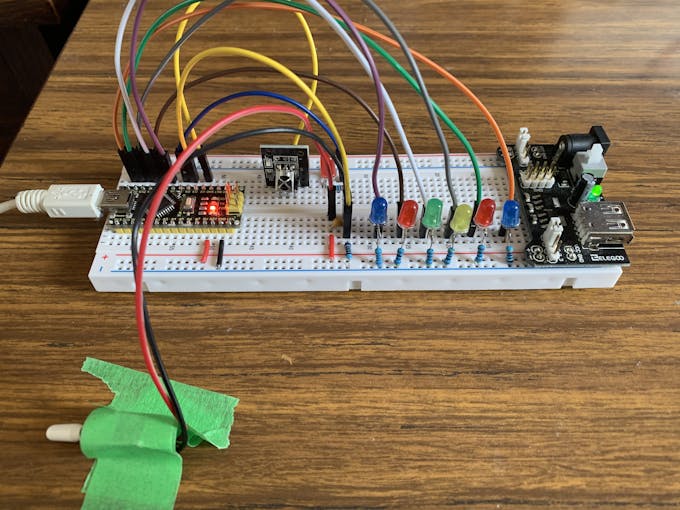
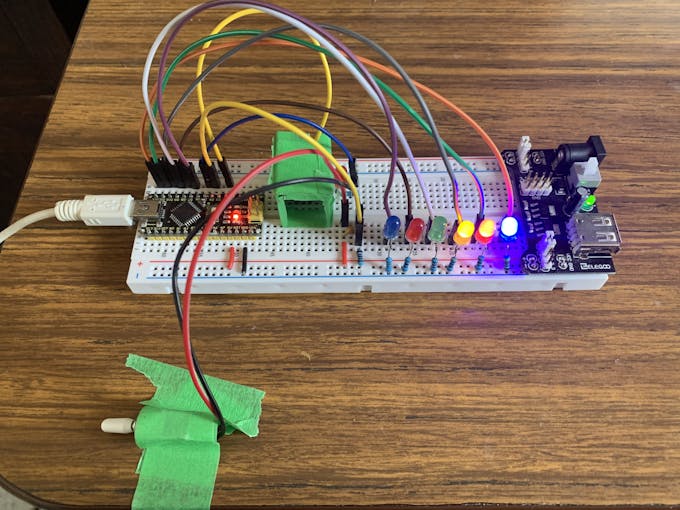
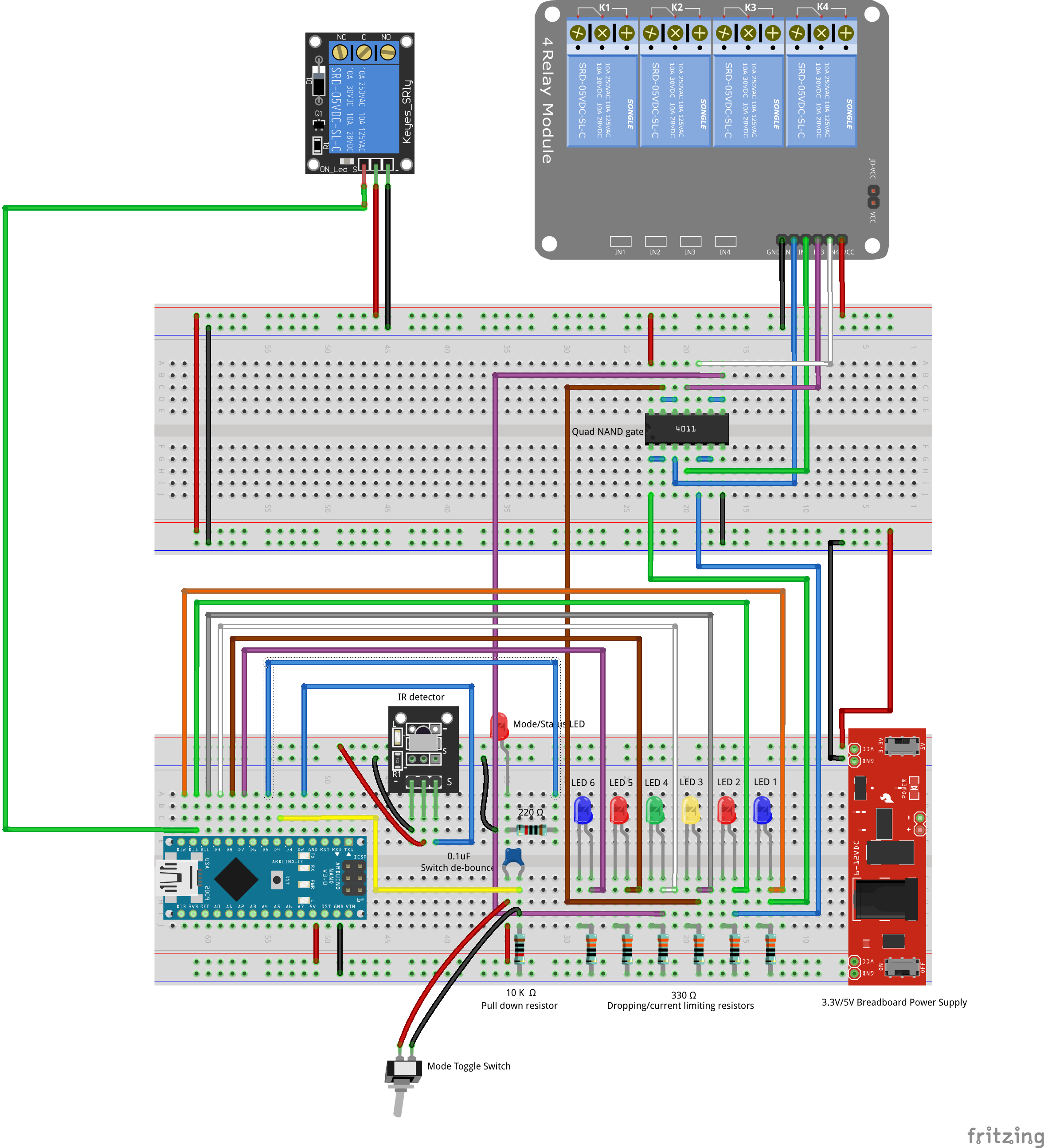
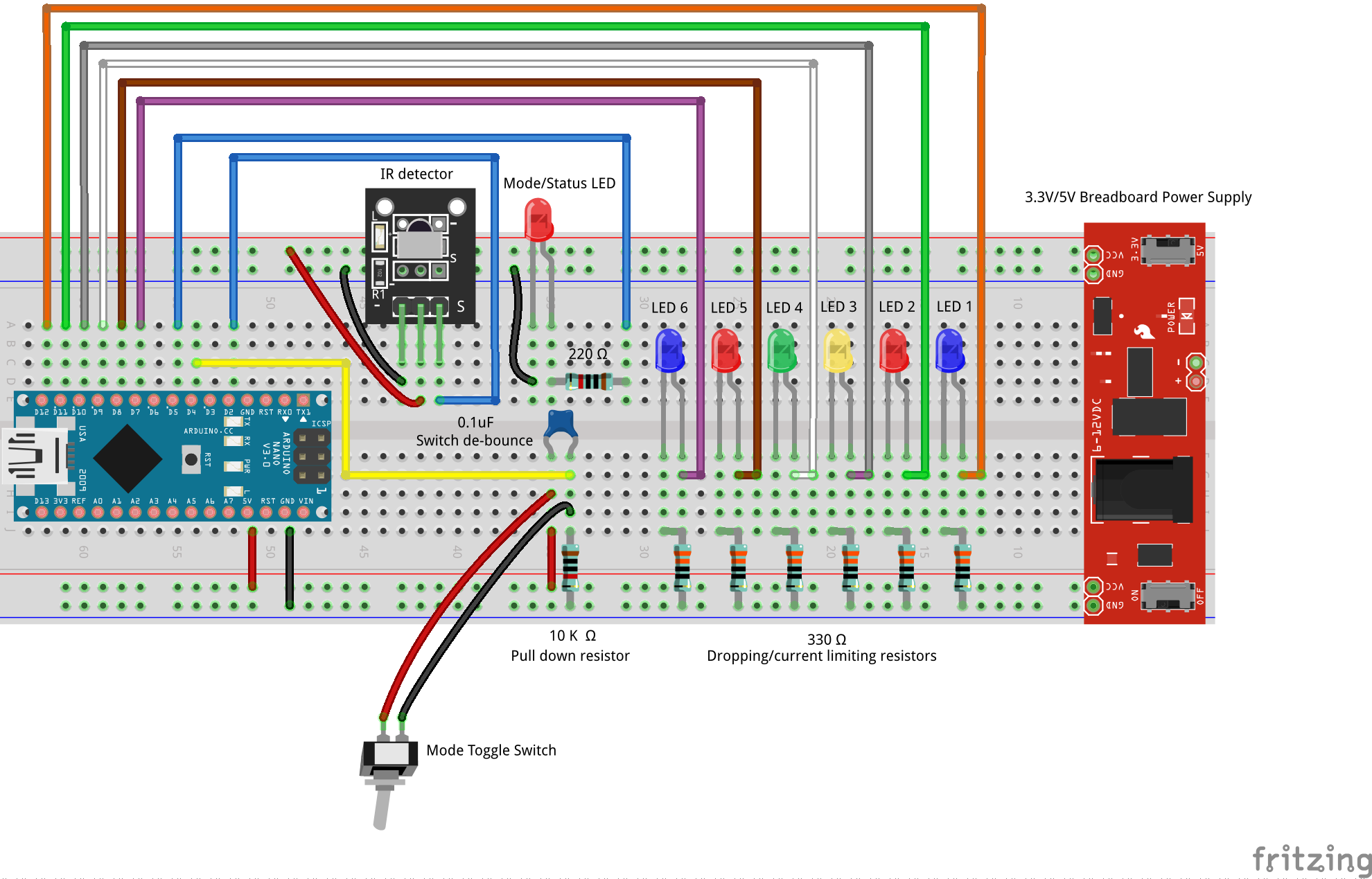
Você pode usar os controles remotos para ligar dispositivos como lâmpadas, aquecedores, etc. com relés, transistores de potência ou qualquer outra coisa que um sinal de 5 volts possa controlar. Conforme mostrado aqui, ele apenas alterna até 6 LEDs. A ideia é fornecer o esboço e o layout do breadboard para que os sinais enviados aos LEDs possam ser enviados em paralelo ao que o usuário imaginar!
Conforme projetado, ele lê 6 códigos IR de qualquer controle remoto e os "memoriza". Eu gosto de usar dights 1, 2, 3, 4, 5, 6 - mas quaisquer seis teclas irão funcionar. Observe que qualquer outra chave com um código IR diferente dos 6 códigos conhecidos atua como uma reinicialização e define todas as saídas como desligadas. Eu consigo isso escrevendo os códigos como inteiros longos na memória EEPROM na placa Ardunio. Cada um leva 4 bytes, mas como o UNO e o NANO têm cada um 1024 bytes de memória EEPROM, há muito espaço. Essa memória é mantida por meio de reinicializações e desligamentos, como seria de se esperar. A coisa toda caberia em uma única placa de ensaio, exceto a chave seletora. Pinos podem ser soldados a esse switch para incluí-lo na placa de ensaio. Fui preguiçoso e usei fita adesiva para segurá-lo na minha mesa durante o desenvolvimento.
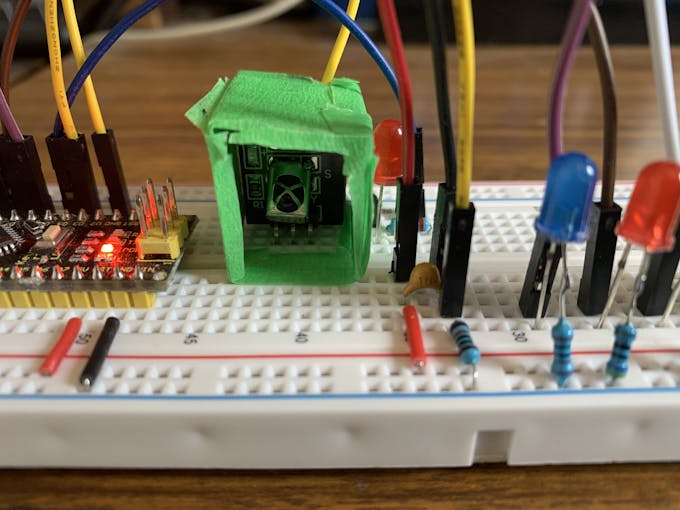
Eu tentei com cinco sobres diferentes antigos, e todos eles têm o mesmo desempenho. O "pegadinho" com o qual eu lutei era luz difusa ou sinais mais fracos de alguns controles remotos. Para resolver isso, dobrei cuidadosamente o receptor "LED" para baixo em cerca de 45 graus e coloquei um pequeno papelão caseiro e uma caixa de fita adesiva sobre ele, com uma das extremidades aberta. Parece captar os códigos de forma consistente e a uma distância de 1,5 a 2,5 metros ou mais. Eu não perdi nada em mais de cinco dias testando e aprimorando o programa.
Para programá-lo, use a posição "aprender". Você vai do modo "executar" para o modo "aprender" girando uma chave seletora. Esta chave liga um LED indicador de modo vermelho, indicando que está pronto para ouvir. O LED 1 pisca e você pressiona uma tecla no controle remoto. O LED 1 piscando está programado para reagir a esse código. Assim que reconhece o código, ele pisca rapidamente o LED indicador de modo por um ou dois segundos (tão rápido que parece que está vibrando!) E passa para o próximo LED. Isso continua até que todos os seis sejam programados. Em seguida, o LED indicador de modo pisca lentamente em intervalos de um segundo, indicando que o sistema deve ser alternado para o modo de operação.
Descobri durante a programação que o erro mais comum era esquecer de mover o dedo para o próximo dígito do controle remoto. Assim, é fácil programar duas saídas com o mesmo código. Cada vez que ele é inicializado, ele procura por duplicatas. Se ele os encontrar, os LEDs "ofensivos" piscarão algumas vezes para sugerir que a reprogramação pode ser necessária. No entanto, uma pessoa pode querer várias chaves fazendo a mesma coisa, então isso não força a reprogramação.
O status do modo, erros, etc. são indicados pela taxa de flash do LED de status VERMELHO. Todas as informações indicadas pelos LEDs piscando, etc., são enviadas para o monitor serial. Eu o configurei para usar sequências de flashes de LED para que um usuário pudesse configurá-lo sem um computador. As mensagens enviadas para o monitor serial são mais fáceis de seguir do que memorizar o que significam os LEDs piscando em várias velocidades. Como isso normalmente seria programado apenas algumas vezes, provavelmente é mais natural conectá-lo ao PC e assistir ao texto no monitor serial.
Existem muitas verificações e equilíbrios no código do esboço. Eles estão bem documentados (espero!), Então não vou dar os detalhes aqui. Os usuários familiarizados com C, C ++ e Arduino IDE devem ser capazes de facilmente seguir o código e fazer modificações, se desejado.
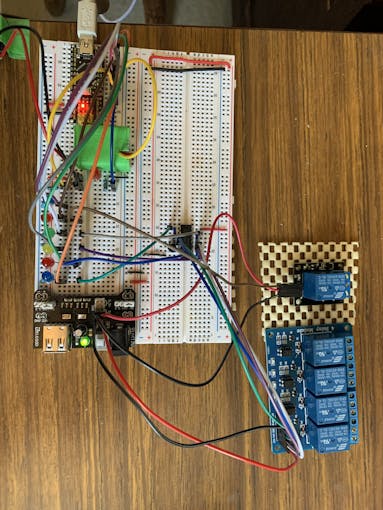
Adendo: Eu testei isso com 5 relés em paralelo com os LEDs 1 a 5 e funciona conforme o esperado. Todos eles alternam um abajur de 120 VAC para que o circuito funcione conforme o esperado. Fiquei sem relés, então deve-se assumir que o 6º sinal também funcionará. Observe que esta é apenas uma prova de conceito. Tive que inverter os sinais das primeiras quatro saídas com uma porta NAND quad CD4011 porque eles fecham em 0 volts em oposição a 5 volts. O relé único funciona em um sinal de + 5 volts, portanto, nenhuma inversão de sinal foi necessária. Tenha cuidado ao mudar as tensões da rede. Eles são de alta voltagem e têm potencial para causar um forte choque ou até mesmo matar!
Lembre-se, este é apenas um exemplo. Use sua imaginação para saber quais dispositivos conectar às 6 saídas. Aproveitar!
Código
- Desenho de reaproveitamento remoto IR
Esboço de reaproveitamento remoto IR Arduino
/ * Alterne 6 LEDs usando um controle remoto IR para ilustrar como redefinir os controles remotos Surpulus para que possam ser usados para controlar quase todos os dispositivos. Este esboço aprende os códigos do fabricante para os botões 1,2,3,4,5,6 e 0 em qualquer controle remoto IR quando a chave seletora está na posição "Aprender" ou programa. Esses valores são salvos na EEPROM do Arduino Nano. Quando a chave seletora é colocada no modo "Executar", esses valores são usados para determinar qual tecla é pressionada. 6 LEDs associados são então ligados e desligados pelo controle remoto. Isso é para demonstrar como aprender e interpretar os códigos, independentemente do tipo de controle remoto infravermelho. Além dos LEDs, as saídas podem ser expandidas para ligar ou desligar dispositivos com relés, transistores de alta potência, etc. Paul M Dunphy VE1DX março de 2020 * / // Incluir Biblioteca Remota IR desenvolvida por Ken Shirriff # include// Permite ler / escrever para 1024 bytes de EEPROM # include long unsigned int intIRCode; long unsigned int savedIRCodes [6]; long unsigned int dupeCheck [6]; // Define o pino para o sensor de IR int Recv_Pin =2; // Define as constantes de pin para alternar os LEDsconst int PinOne =12; const int PinTwo =11; const int PinThree =10; const int PinFour =9; const int PinFive =8; const int PinSix =7; // Definir constantes de pin para ler e indicar o // status da chave de alternância Executar / Aprender.const int switchPin =4; const int statusPin =5; const unsigned long int repeatKeyPress =0xFFFFFFFF; boolean learnMode; // Usado para acompanhar em qual // modo estamos de acordo com o switch.boolean first_iteration; // Definir inteiros para lembrar os estados de alternância de cada LEDint togglestate1; int togglestate2; int togglestate3; int togglestate4; int togglestate5; int togglestate6; int current_remote_code; int remote_code_1; int remote_code_2; int remote_code_3; int remote_code_3; int remote_code_3; int remote_code_3; // Definir receptor de IR e objetos de resultadosIRrecv irrecv (Recv_Pin); decode_results results; void EEPROMWritelong (endereço interno, valor longo) // Grava um inteiro longo de 4 bytes (32 bits) na EEPROM // Como eles têm 4 bytes de comprimento, eles são armazenado em // endereço para endereço + 3 {// Decompor um inteiro longo em 4 bytes usando bitshift. // Um =Mais significativo -> Quatro =Byte menos significativo byte quatro =(valor &0xFF); byte três =((valor>> 8) &0xFF); byte dois =((valor>> 16) &0xFF); byte um =((valor>> 24) &0xFF); EEPROM.write (endereço, quatro); EEPROM.write (endereço + 1, três); EEPROM.write (endereço + 2, dois); EEPROM.write (endereço + 3, um); } long EEPROMReadlong (long address) // Lê um inteiro longo de 4 bytes (32 bits) da EEPROM.// Como eles têm 4 bytes de comprimento, eles foram armazenados no // endereço para o endereço + 3 {long four =EEPROM.read ( Morada); três longos =EEPROM.read (endereço + 1); dois longos =EEPROM.read (endereço + 2); um longo =EEPROM.read (endereço + 3); // Monte os bytes em um inteiro longo e retorne return ((quatro <<0) &0xFF) + ((três <<8) &0xFFFF) + ((dois <<16) &0xFFFFFF) + ((um <<24) &repeatKeyPress); } int Flip_LED (int led, int toggle_state) {if (toggle_state ==0) {digitalWrite (led, HIGH); toggle_state =1; } else {digitalWrite (led, LOW); toggle_state =0; } return toggle_state; } void Reset () {// Desligue todos os LEDs e defina os sinalizadores // de alternância para desligados (0) digitalWrite (PinOne, LOW); digitalWrite (PinTwo, LOW); digitalWrite (PinThree, LOW); digitalWrite (PinFour, LOW); digitalWrite (PinFive, LOW); digitalWrite (PinSix, LOW); togglestate1 =0; togglestate2 =0; togglestate3 =0; togglestate4 =0; togglestate5 =0; togglestate6 =0; } void guessType () {Serial.print ("O remoto parece ser um"); switch (results.decode_type) {case NEC:Serial.println ("NEC"); pausa; case SONY:Serial.println ("SONY"); pausa; caso RC5:Serial.println ("RC5"); pausa; caso RC6:Serial.println ("RC6"); pausa; case DISH:Serial.println ("DISH"); pausa; case SHARP:Serial.println ("SHARP"); pausa; case JVC:Serial.println ("JVC"); pausa; case SANYO:Serial.println ("SANYO"); pausa; case MITSUBISHI:Serial.println ("MITSUBISHI"); pausa; caso SAMSUNG:Serial.println ("SAMSUNG"); pausa; caso LG:Serial.println ("LG"); pausa; case WHYNTER:Serial.println ("WHYNTER"); pausa; case AIWA_RC_T501:Serial.println ("AIWA_RC_T501"); pausa; case PANASONIC:Serial.println ("PANASONIC"); pausa; case DENON:Serial.println ("DENON"); pausa; padrão:case UNKNOWN:Serial.println ("UNKNOWN"); pausa; }} int learnCodeRead (int pinCode) {if (irrecv.decode (&results)) {pinCode =results.value; } return pinCode; } void Confirm () {int i; para (i =0; i <=20; i ++) {digitalWrite (statusPin, HIGH); atraso (50); digitalWrite (statusPin, LOW); atraso (50); } digitalWrite (statusPin, HIGH); // Deixe o LED "Aprendizado" alto} void learn_Mode () {boolean goodCode; int i, j; localização interna; pinos internos [6] ={12,11,10,9,8,7}; // Comece a escutar cada um em sequência if (first_iteration) {Serial.println (); Serial.println ("Entrando no modo de aprendizagem"); Serial.println (); } intIRCode =0; localização =0; goodCode =true; j =0; while ((goodCode =true) and (j <=5)) {for (i =0; i <=25; i ++) {digitalWrite (pins [j], HIGH); atraso (200); intIRCode =learnCodeRead (intIRCode); digitalWrite (pinos [j], LOW); atraso (200); intIRCode =learnCodeRead (intIRCode); goodCode =((intIRCode! =repeatKeyPress) e (intIRCode! =0)); if (goodCode) {i =30; // Truque para sair do loop porque 'break' // não funciona em loops} irrecv.resume (); // Comece a ouvir novamente} goodCode =(intIRCode! =RepeatKeyPress e intIRCode! =0); if (goodCode) {if (j ==0) {guessType (); } Serial.print ("Gravando no local da EEPROM"); Serial.print (local); Serial.print ("código IR ="); Serial.println (intIRCode, HEX); EEPROMWritelong (localização, intIRCode); localização =localização + 4; j ++; Confirme(); intIRCode =0; irrecv.resume (); // Comece a ouvir novamente}} Serial.println (); Serial.println ("Colocar o Arduino de volta no modo de execução."); while (digitalRead (switchPin) ==HIGH) {digitalWrite (statusPin, HIGH); atraso (1000); digitalWrite (statusPin, LOW); atraso (1000); } Serial.println (); Serial.println ("Retornando ao modo de execução."); // Provavelmente não precisa ser tão drástico aqui, mas // Isso é uma "redefinição" para ter certeza de que sairemos do // modo de aprendizagem e reiniciaremos corretamente. É * provável * OK // remover as 4 linhas a seguir. atraso (50); Serial.flush (); atraso (50); asm volatile ("jmp 0"); } void run_Mode () {if (first_iteration) {Serial.println ("Entrando no modo de execução"); } if (irrecv.decode (&results)) {if (results.value! =repeatKeyPress) {current_remote_code =results.value; Serial.print ("Tecla pressionada detectada, código IR ="); Serial.println (current_remote_code, HEX); if (current_remote_code ==remote_code_1) {togglestate1 =Flip_LED (PinOne, togglestate1); } else if (current_remote_code ==remote_code_2) {togglestate2 =Flip_LED (PinTwo, togglestate2); } else if (current_remote_code ==remote_code_3) {togglestate3 =Flip_LED (PinThree, togglestate3); } else if (current_remote_code ==remote_code_4) {togglestate4 =Flip_LED (PinFour, togglestate4); } else if (current_remote_code ==remote_code_5) {togglestate5 =Flip_LED (PinFive, togglestate5); } else if (current_remote_code ==remote_code_6) {togglestate6 =Flip_LED (PinSix, togglestate6); } else {Reset (); }} atraso (500); // Usado para contornar a sequência rápida de dados // se um botão for pressionado. Retarda o tempo de resposta // introduzindo um atraso no loop. irrecv.resume (); // Comece a ouvir novamente}} void setup () {first_iteration =true; int i, j, k; localização interna; int dupeFlash [6] ={12,11,10,9,8,7}; // Fixar números no flash // se duplicatas encontradas Serial.begin (9600); irrecv.enableIRIn (); // Habilite o receptor IR / * A seção de código a seguir nunca deve precisar ser redefinida a EEPROM. * No entanto, alguns NANOs novos, prontos para uso, aparecem com seus EEPROMs configurados * para FFFFFFFFs. Acontece que este é o código enviado por muitos controles remotos IR quando * uma tecla é mantida pressionada. Este esboço verifica esse código em vários lugares * e não funcionará corretamente se uma "chave" for atribuída a um FFFFFFFF hexadecimal. Para * evitar esse problema, verificamos se há FFFFFFFFs e, se encontrarmos um, definimos * os 6 locais principais para os códigos Sony RM-YD104. Se isso acontecer, a menos que você * esteja usando aquele controle remoto em particular, você precisará executar o esboço no modo "aprender" * para inicializá-lo. * /// =============Começar Novo Arduino ==================boolean defaultToSony =false; long unsigned int IRCode =0; localização =0; para (i =0; i <=5; i ++) {IRCode =EEPROMReadlong (localização); if (IRCode ==repeatKeyPress) {defaultToSony =true; } localização =localização + 4; } if (defaultToSony) {Serial.println ("HEX FFFFFFFF encontrado na memória EEPROM. Códigos de configuração"); Serial.println ("para um controle remoto Sony RM-YD104. Executando o modo 'aprender' agora"); Serial.println ("é recomendado, a menos que seja o controle remoto que você possui."); EEPROMWritelong (0, 0x10); atraso (50); EEPROMWritelong (4, 0x810); atraso (50); EEPROMWritelong (8, 0x410); atraso (50); EEPROMWritelong (12, 0xC10); atraso (50); EEPROMWritelong (16, 0x210); atraso (50); EEPROMWritelong (20, 0xA10); atraso (50); } // =============Fim do novo Arduino ==================// Definir pinos de LED como saídas pinMode (PinOne, OUTPUT); pinMode (PinTwo, OUTPUT); pinMode (PinThree, OUTPUT); pinMode (PinFour, OUTPUT); pinMode (PinFive, OUTPUT); pinMode (PinSix, OUTPUT); Redefinir(); // Comece com todos eles desligados pinMode (statusPin, OUTPUT); pinMode (switchPin, INPUT); // Obter códigos do último remoto usado Serial.println (); Serial.println ("Lendo códigos remotos IR armazenados..."); localização =0; para (j =0; j <=5; j ++) {savedIRCodes [j] =EEPROMReadlong (localização); Serial.print ("Leitura da localização da EEPROM"); Serial.print (localização); Serial.print ("código IR ="); Serial.println (saveIRCodes [j], HEX); localização =localização + 4; dupeCheck [j] =salvosIRCodes [j]; // Salve uma cópia para verificação de duplicata} // Procure por códigos duplicados consecutivos atribuídos às // saídas. Não procuramos duplicatas gerais porque // é improvável que aconteçam. A experiência tem mostrado que // durante a programação, o erro mais provável é pressionar // a mesma tecla duas vezes em LEDs bacl-to-back. Se duplicatas // forem encontradas, indique isso piscando os LEDs suspeitos. // Existem apenas 6 LEDs, portanto, são necessárias apenas 21 comparações // para encontrar quaisquer duplicatas (6 + 5 + 4 + 3 + 2 + 1 =21). Esta // seção pode ser aprimorada para procurar qualquer duplicata // classificando o array primeiro, etc. for (i =0; i <5 - 1; i ++) {for (j =i + 1; j <6; j ++ ) {if (dupeCheck [i] ==dupeCheck [j]) {Serial.println ("Códigos duplicados encontrados. Sugerir nova execução do modo de aprendizagem"); para (k =0; k <=5; k ++) {digitalWrite (dupeFlash [i], ALTO); digitalWrite (dupeFlash [j], HIGH); atraso (1000); digitalWrite (dupeFlash [i], LOW); digitalWrite (dupeFlash [j], LOW); atraso (1000); }}}} remote_code_1 =savedIRCodes [0]; remote_code_2 =savedIRCodes [1]; remote_code_3 =savedIRCodes [2]; remote_code_4 =savedIRCodes [3]; remote_code_5 =savedIRCodes [4]; remote_code_6 =savedIRCodes [5]; atraso (1000); Serial.println ("Códigos armazenados lidos."); Serial.println (); } void loop () {// Verifique se a alternância está ligada ou desligada. Se estiver ligado (no modo de aprendizagem) // o switchPin é HIGH:learnMode =(digitalRead (switchPin) ==HIGH); if (learnMode) {first_iteration =true; Redefinir(); digitalWrite (statusPin, HIGH); // Liga o LED do modo de aprendizagem:learn_Mode (); Redefinir(); first_iteration =false; } else {digitalWrite (statusPin, LOW); // Desligue o LED do modo de aprendizagem:run_Mode (); first_iteration =false; }}
Esquemas
Obstáculos para evitar o robô com servo motor
Como fazer a medição do oxigênio no sangue e da temperatura corporal
Processo de manufatura
- Diodo emissor de luz (LED)
- Monitoramento remoto do clima usando Raspberry Pi
- Controle remoto universal Raspberry Pi
- Monitor de frequência cardíaca remoto
- Melodia para dança do caixão
- Converta seu telefone antigo em um interruptor remoto
- Criando imagens usando um LED
- Iluminação LED 8x por som
- 5 principais fatores para escolher uma plataforma de controles
- Como descartar máquinas antigas com segurança