


Robô seguidor de linha de velocidade V4
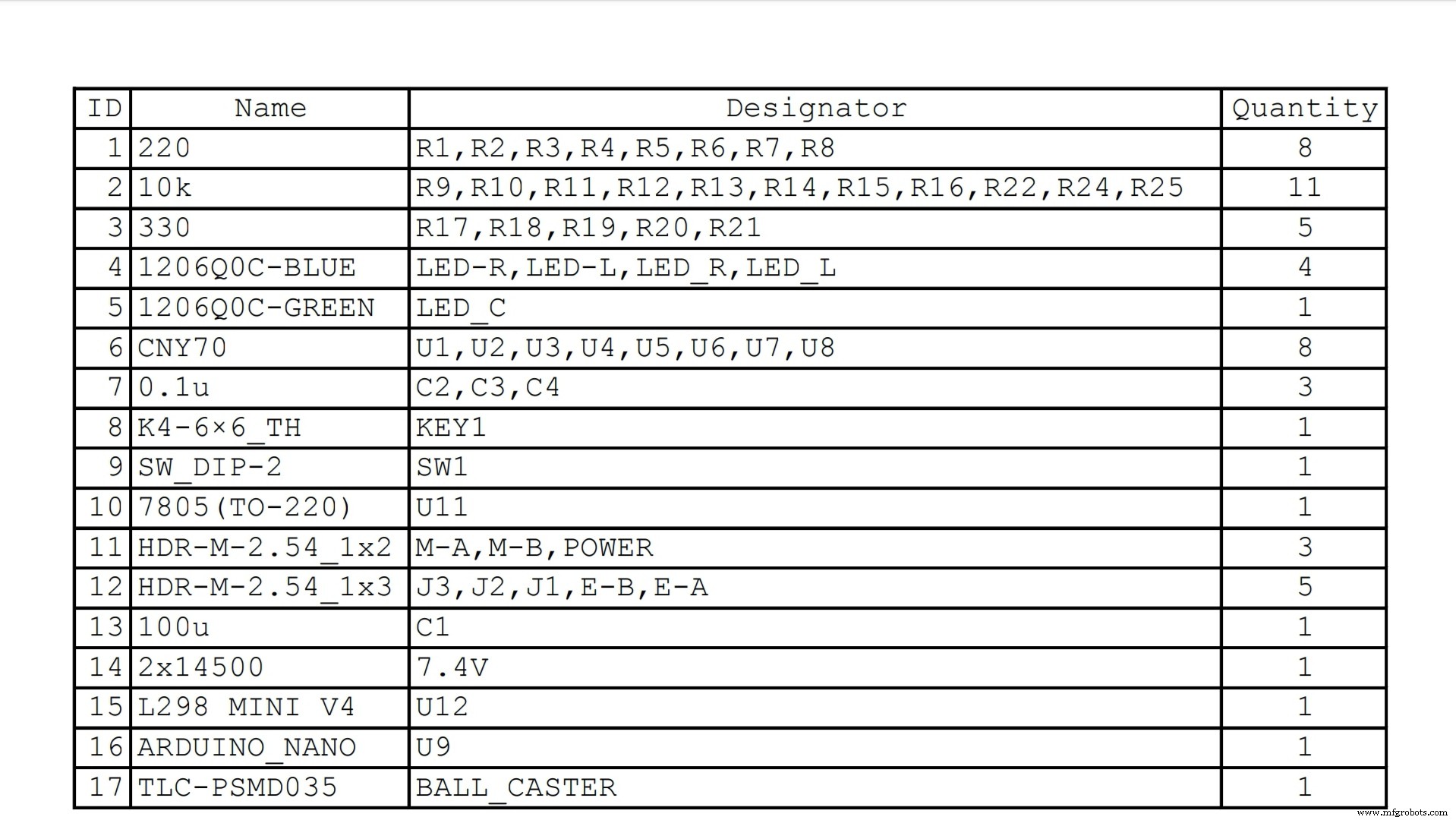
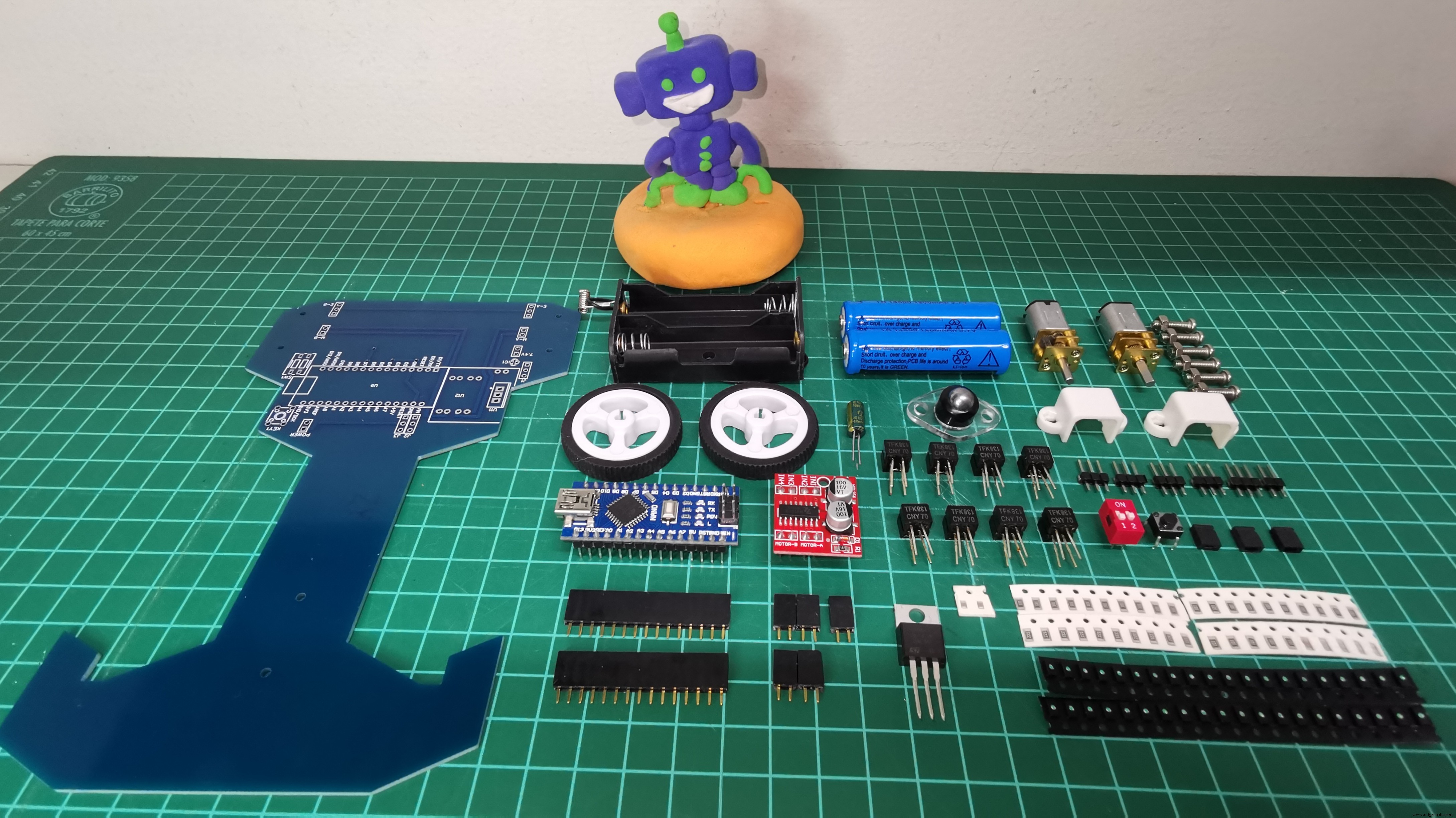
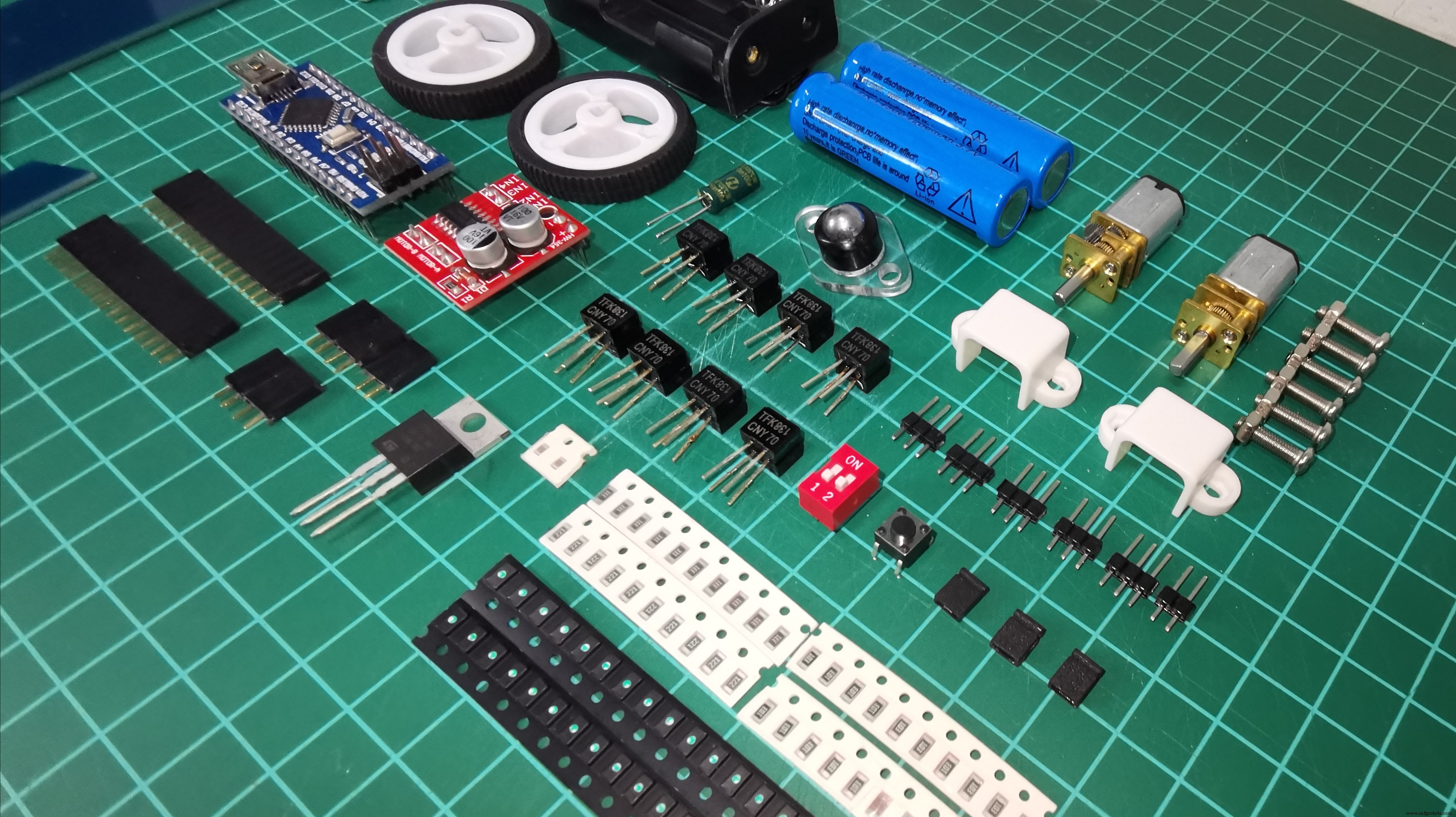
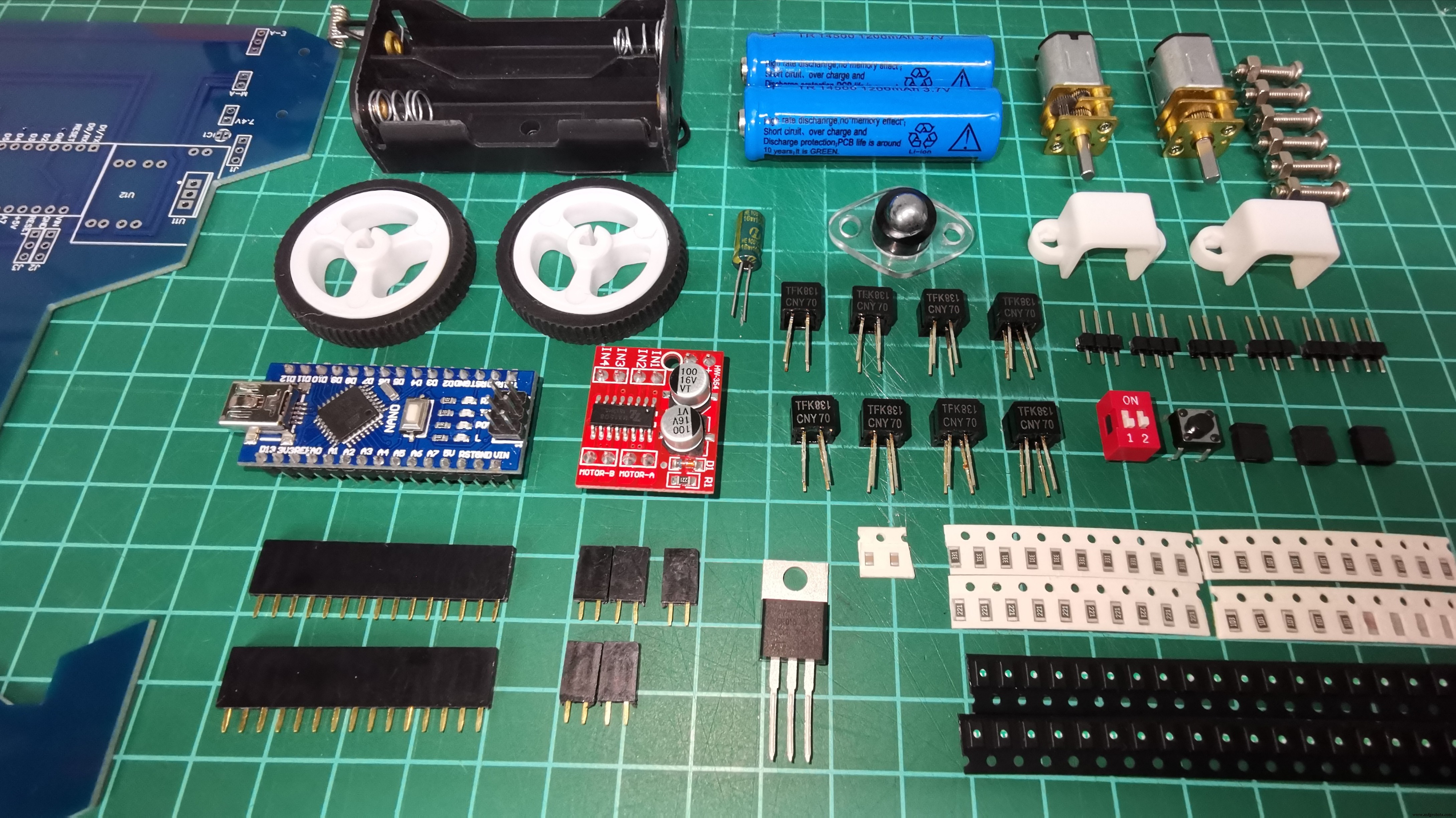
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 8 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 8 | ||||
| × | 11 | ||||
| × | 5 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 3 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 | ||||
 |
| × | 1 |
Ferramentas e máquinas necessárias
 |
| |||
 |
| |||
 |
| |||
 |
|
Aplicativos e serviços online
 |
|
Sobre este projeto
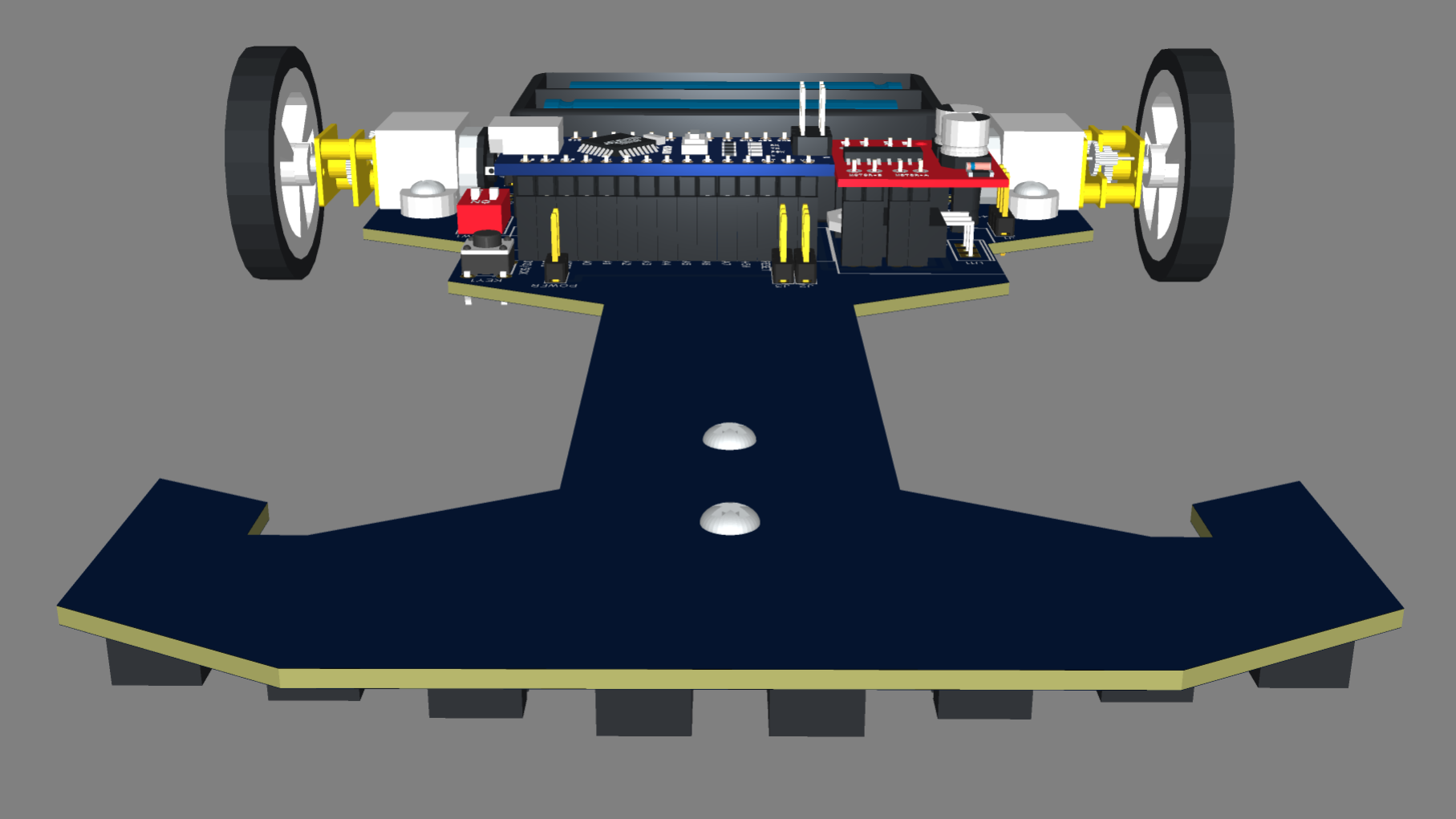
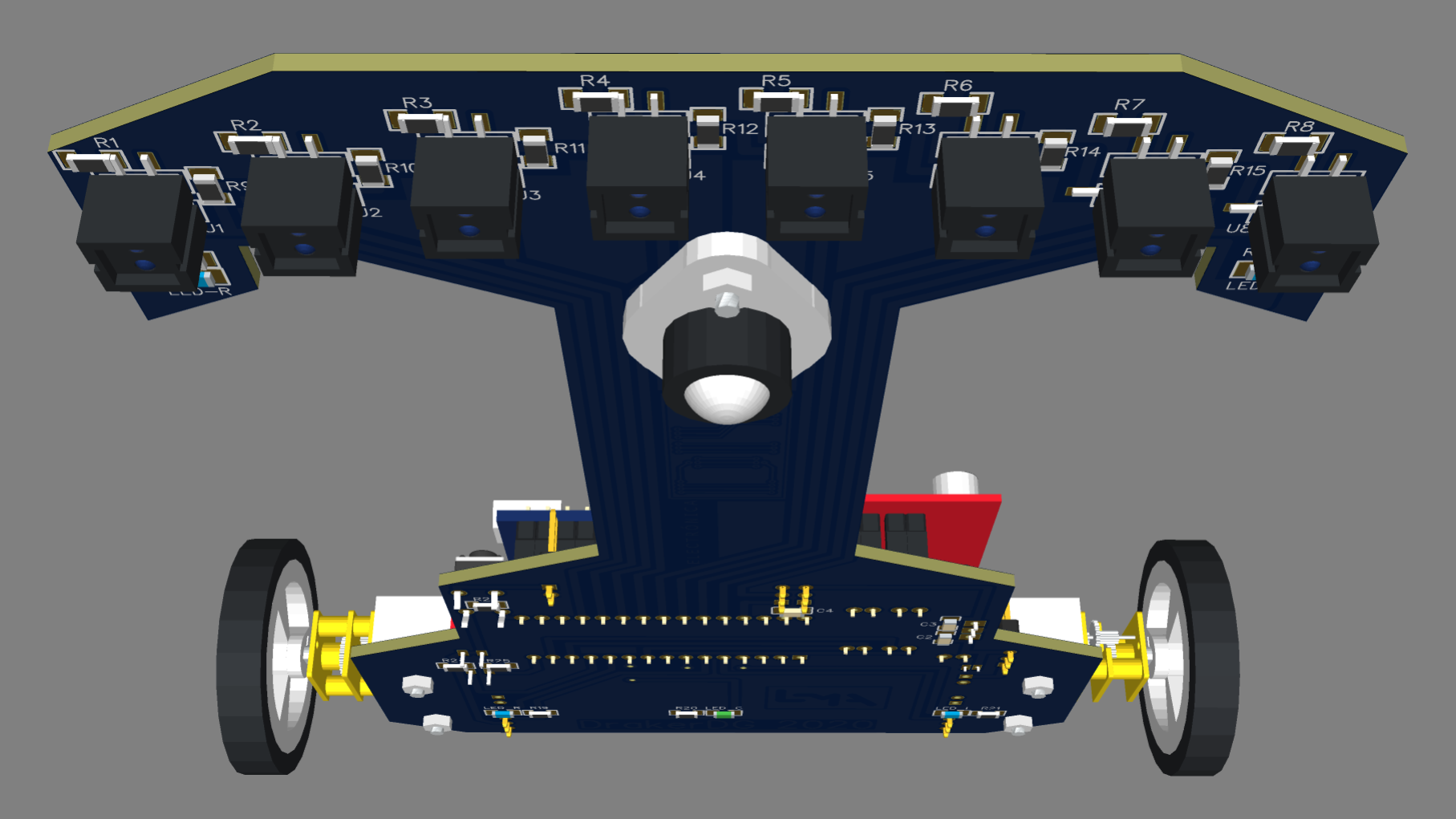
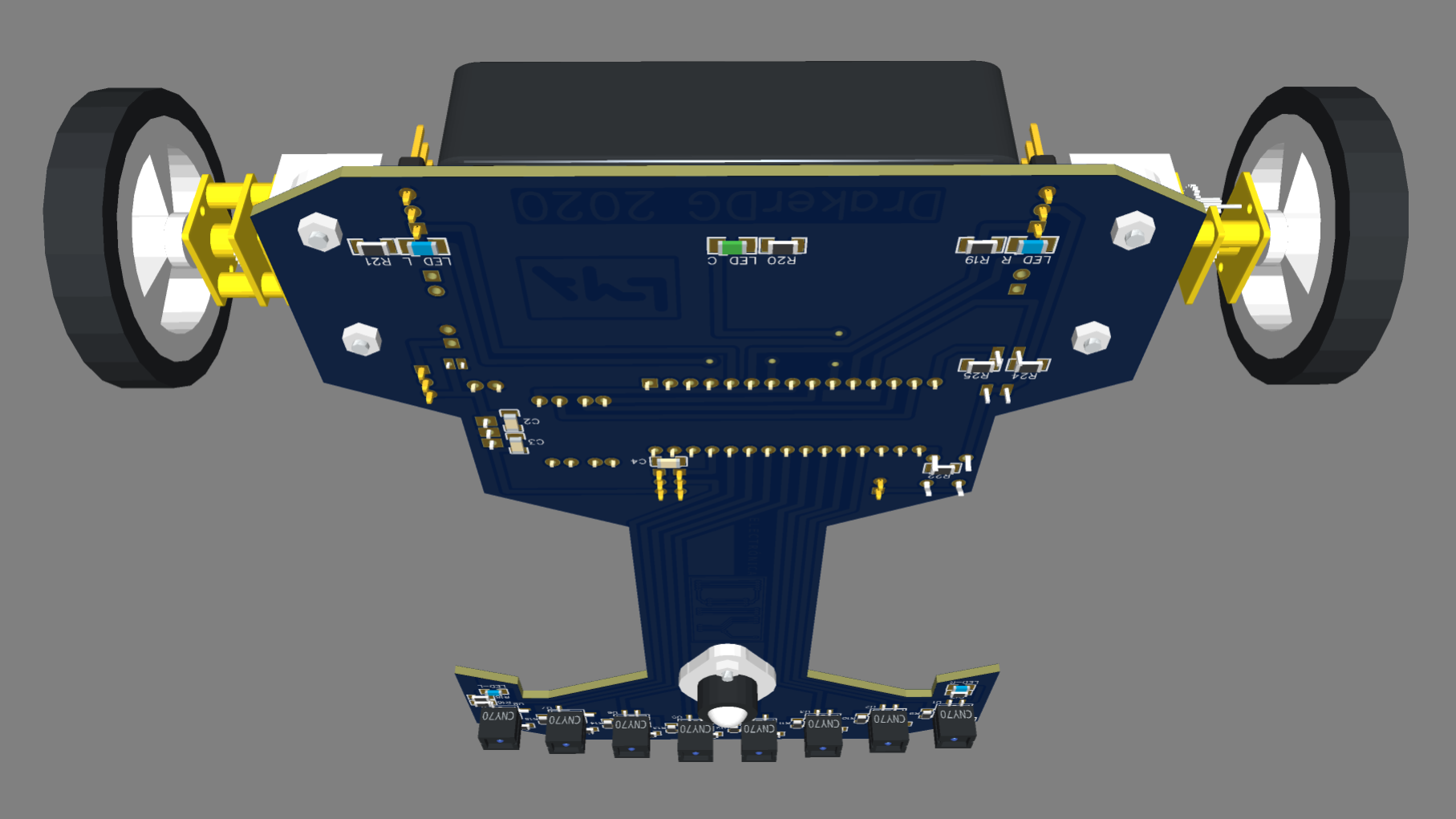
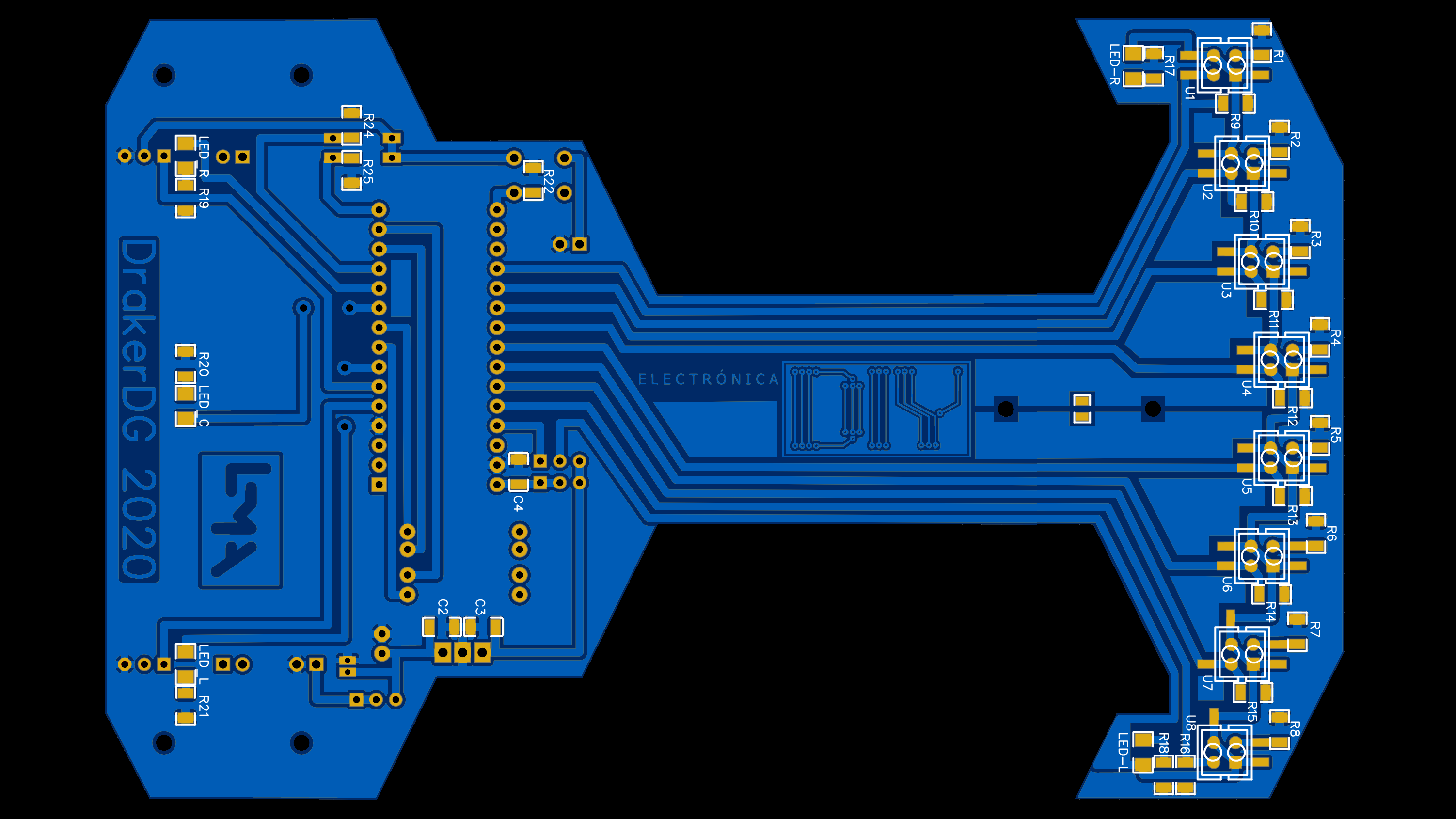
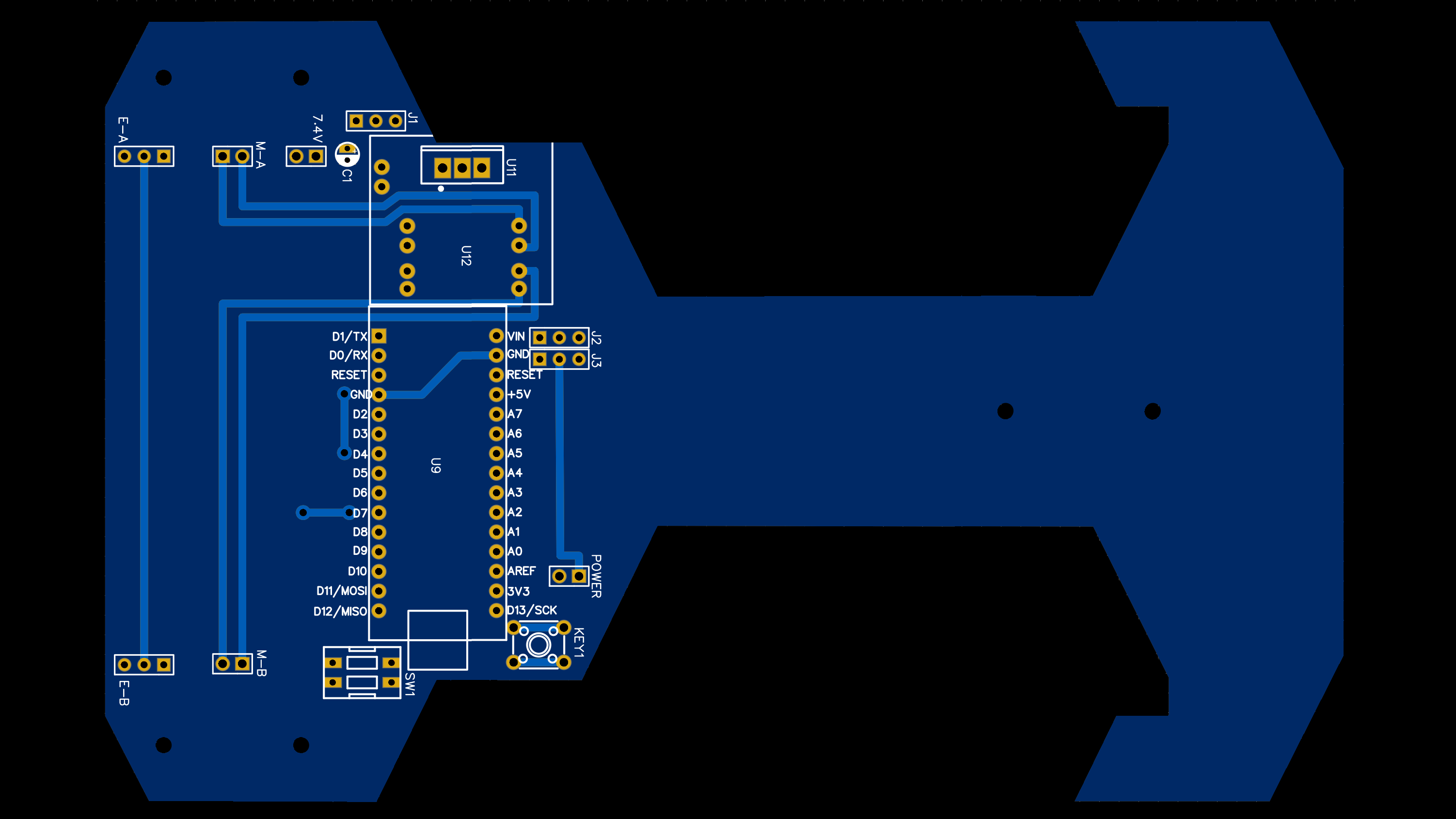
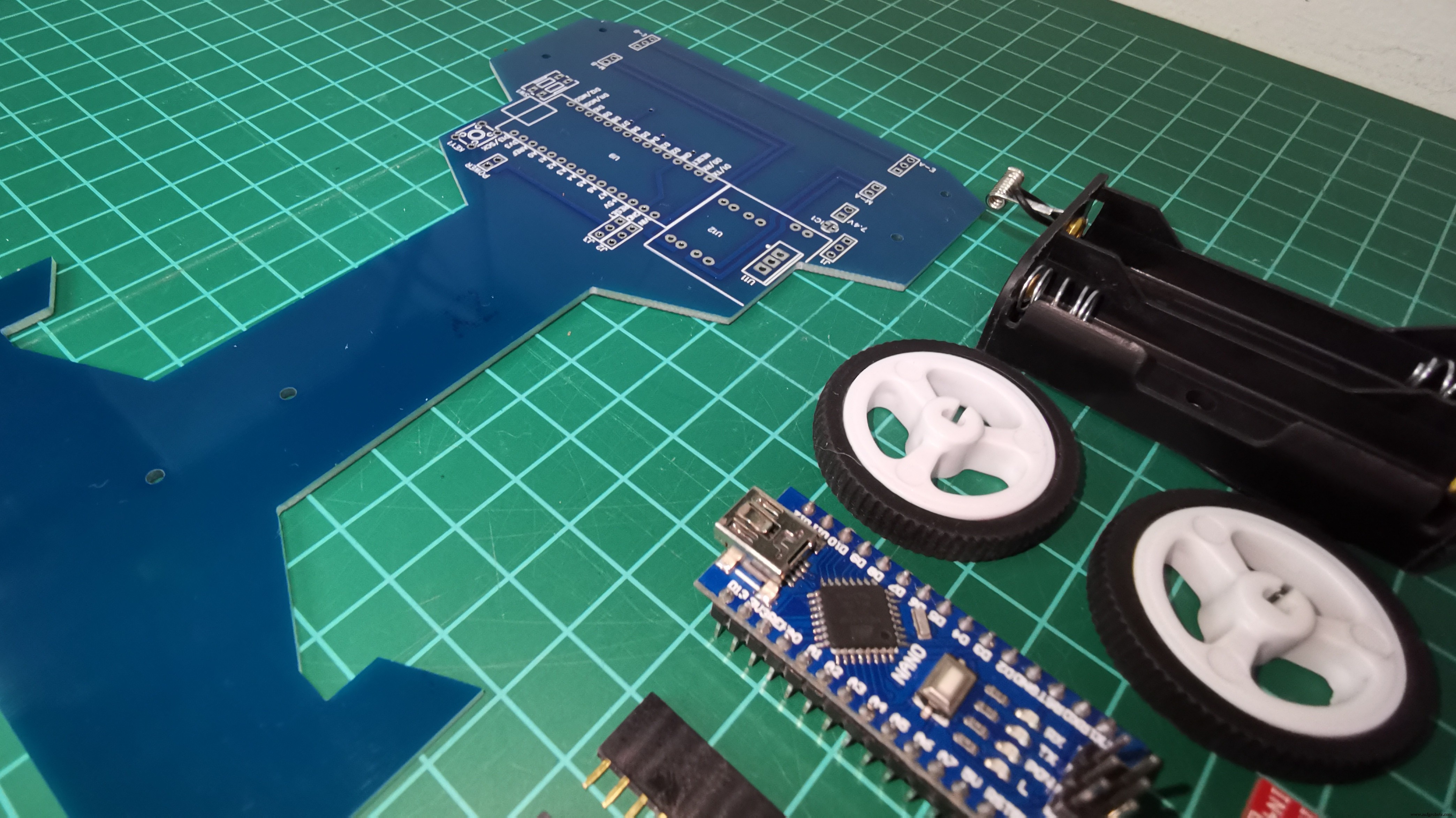
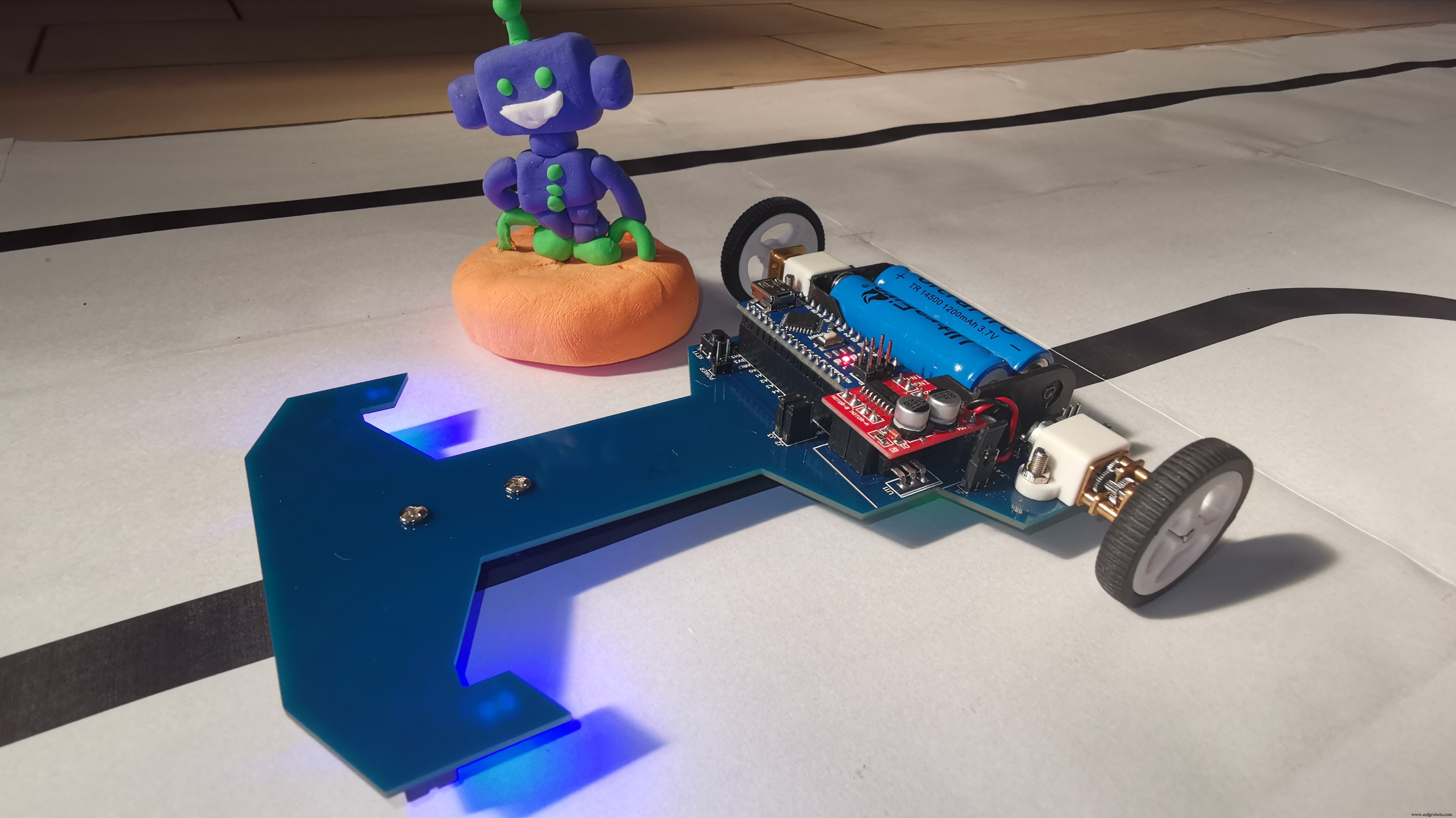
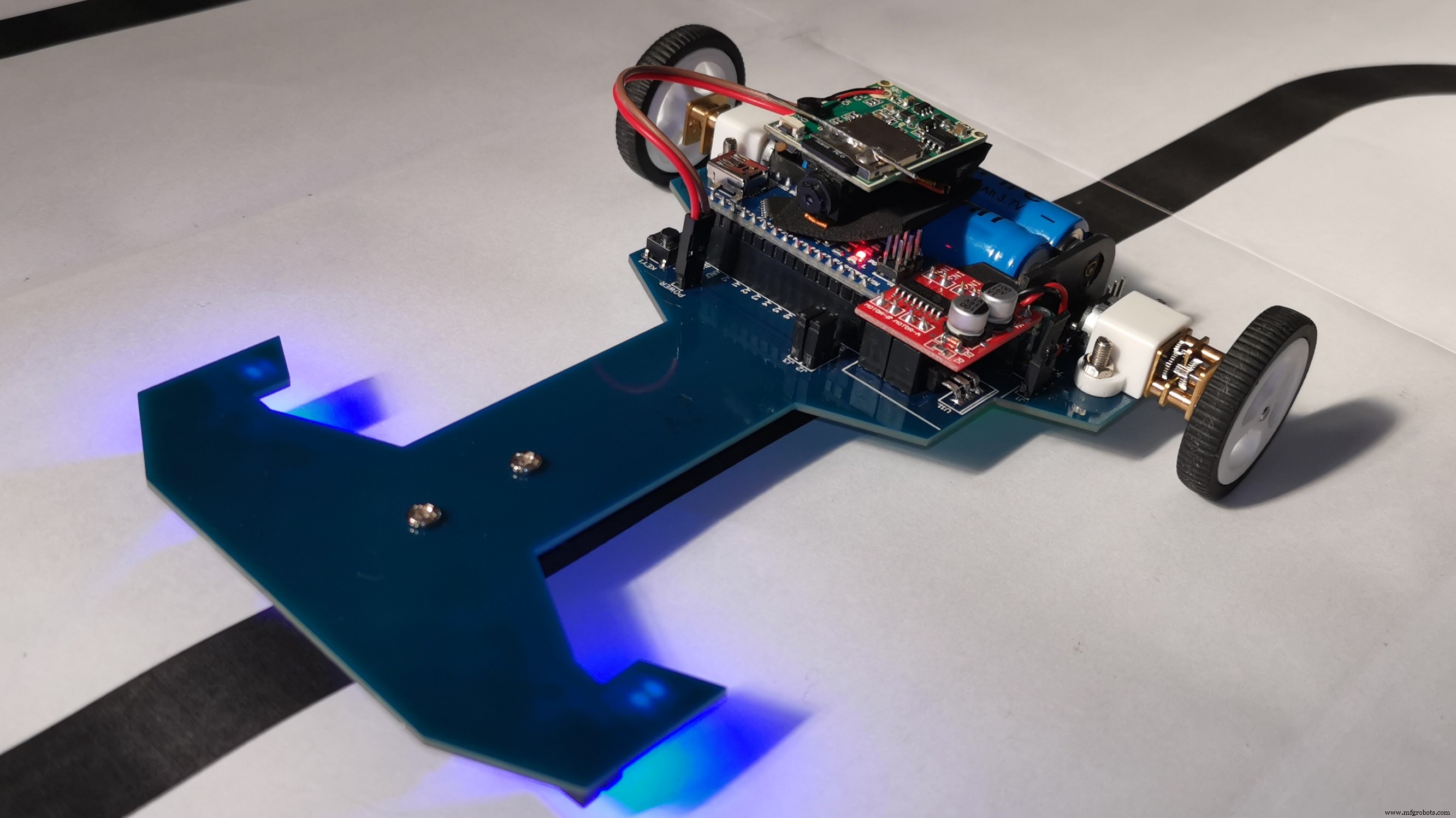
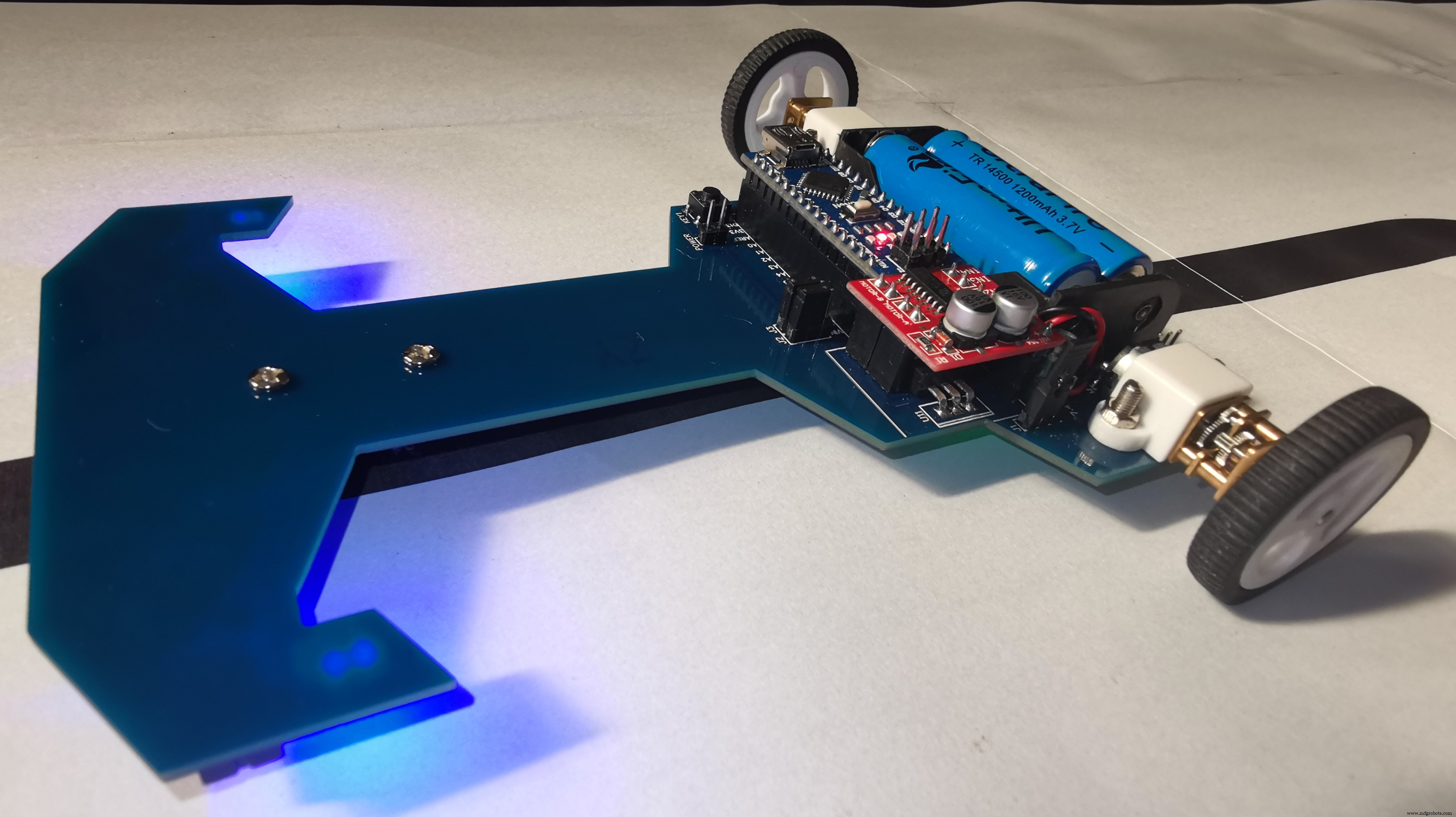
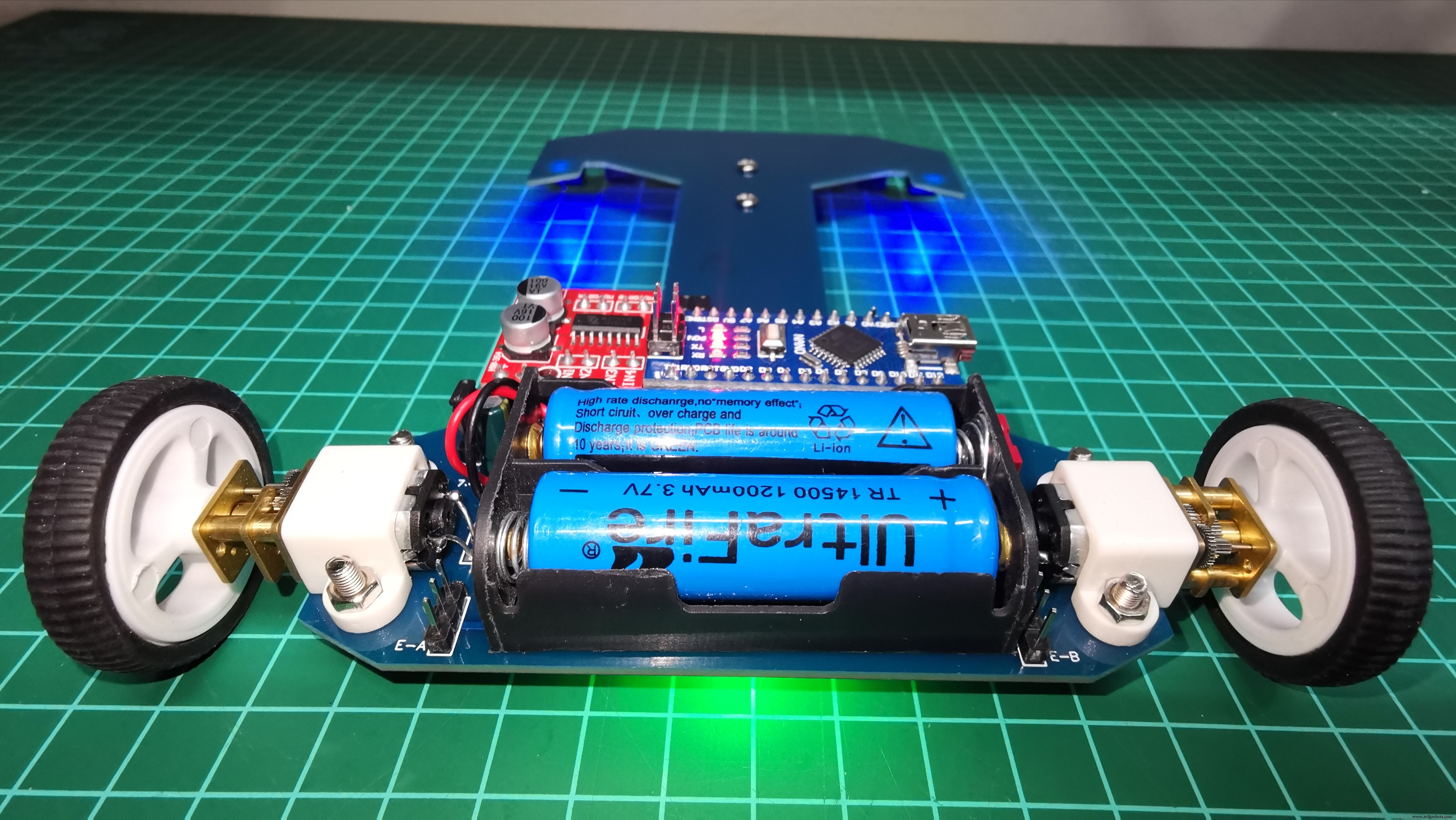
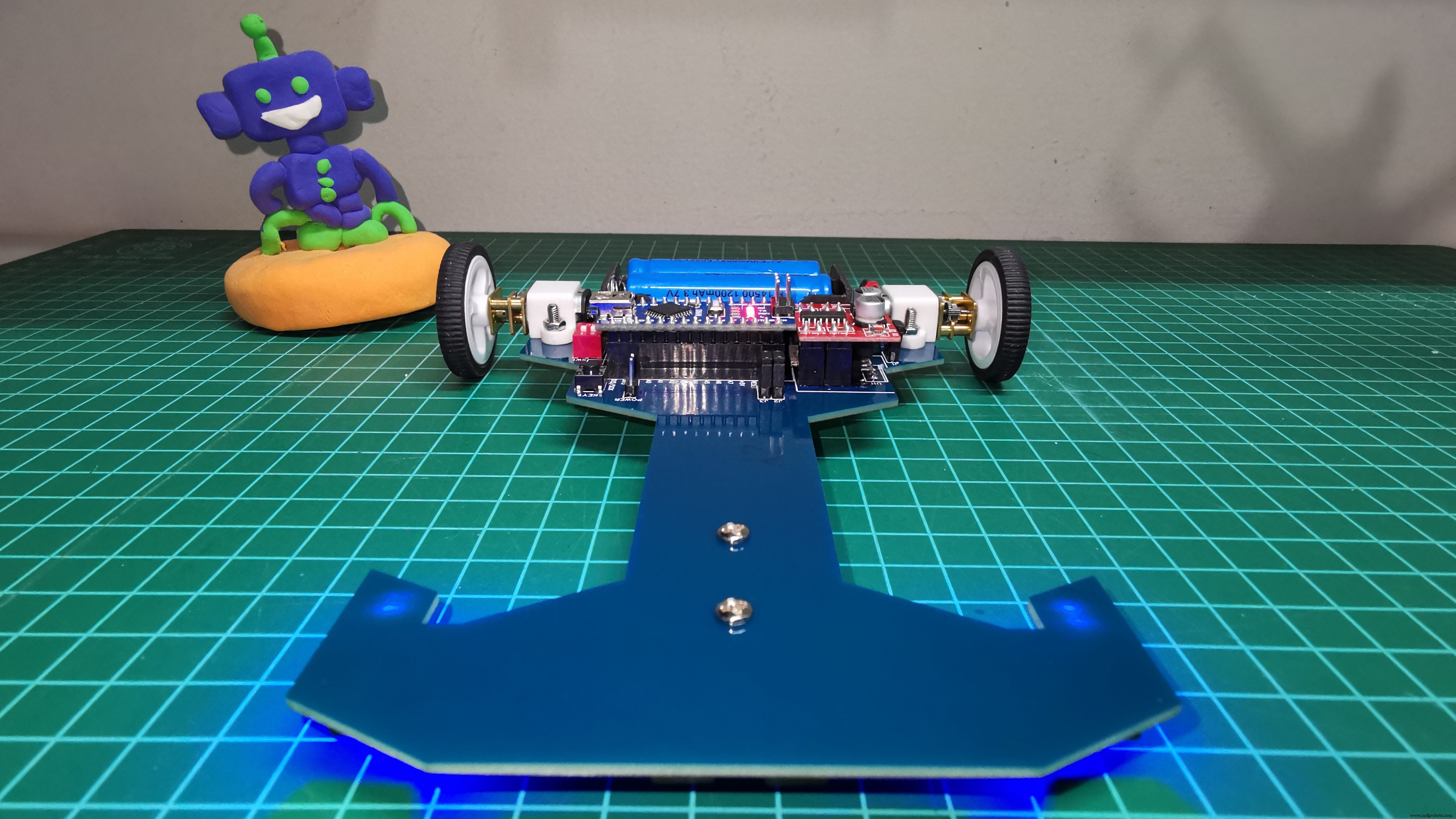
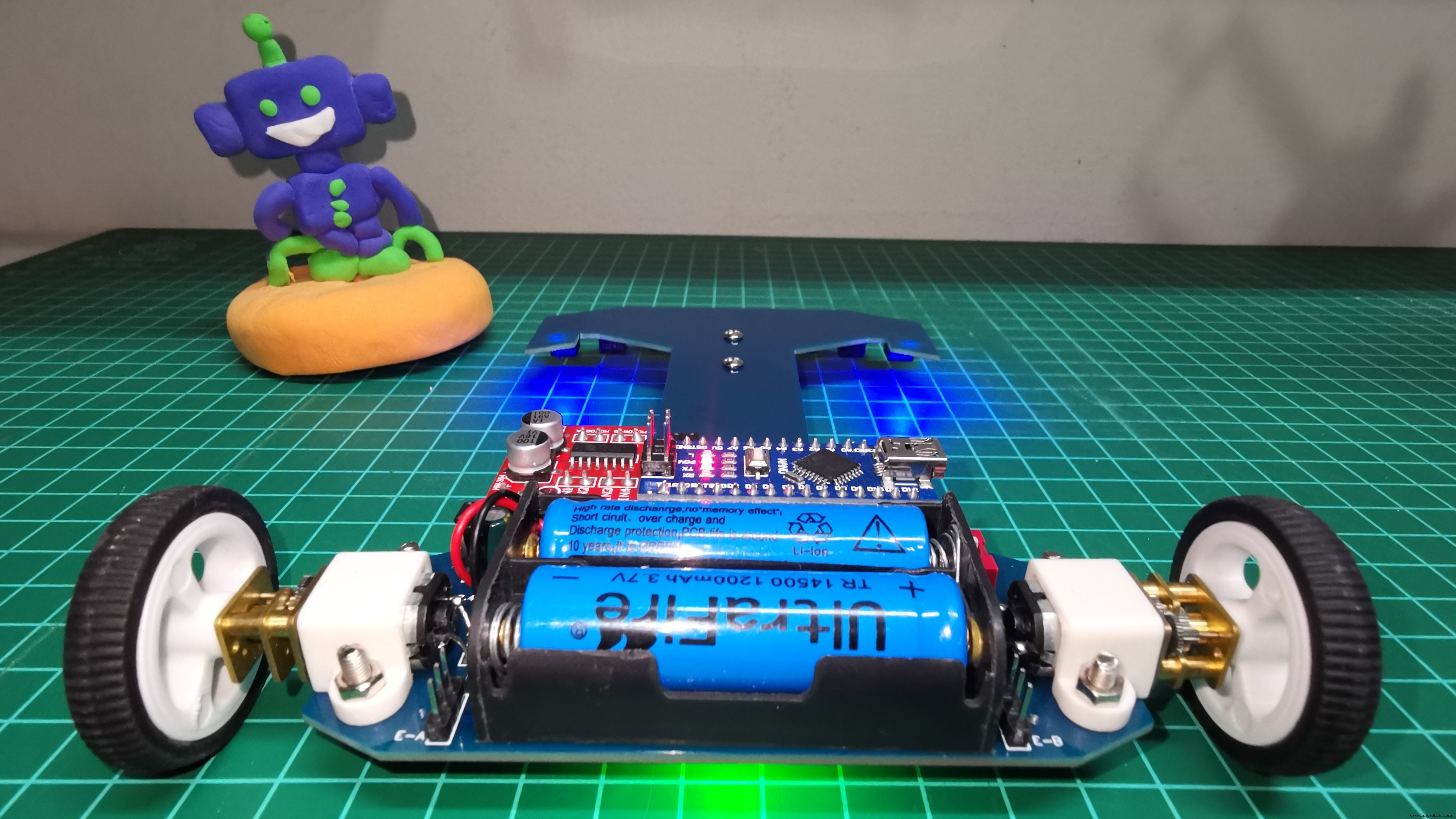
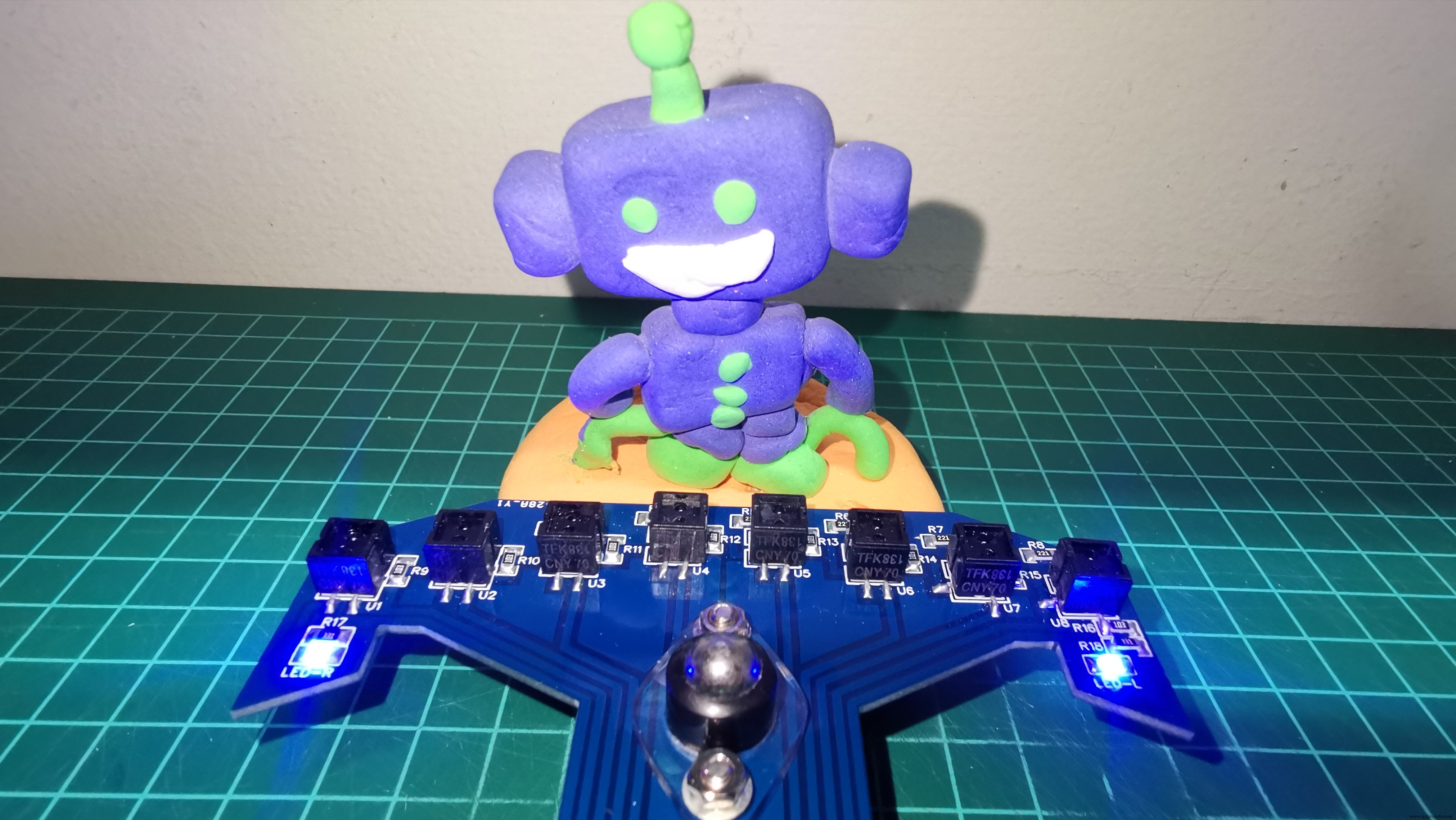
Este é o meu segundo robô seguidor de linha (versão 4). Ao contrário do anterior, fiz o design do circuito impresso com EasyEDA. Este circuito impresso atua como o chassi do robô. A fabricação de placas de circuito impresso vem sendo realizada pela JLCPCB e devo dizer que superou minhas expectativas com qualidade impressionante e entrega em tempo recorde.
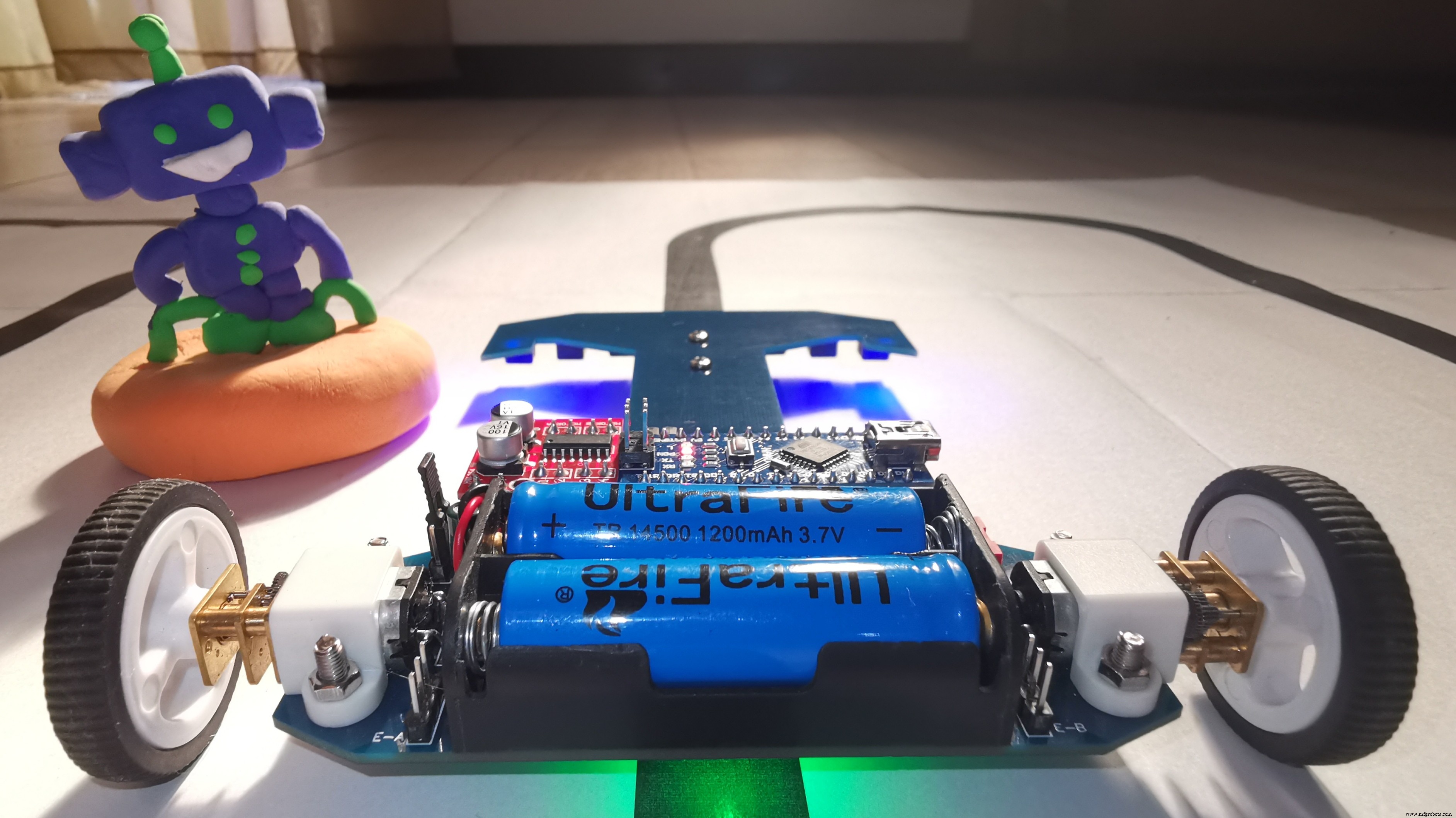
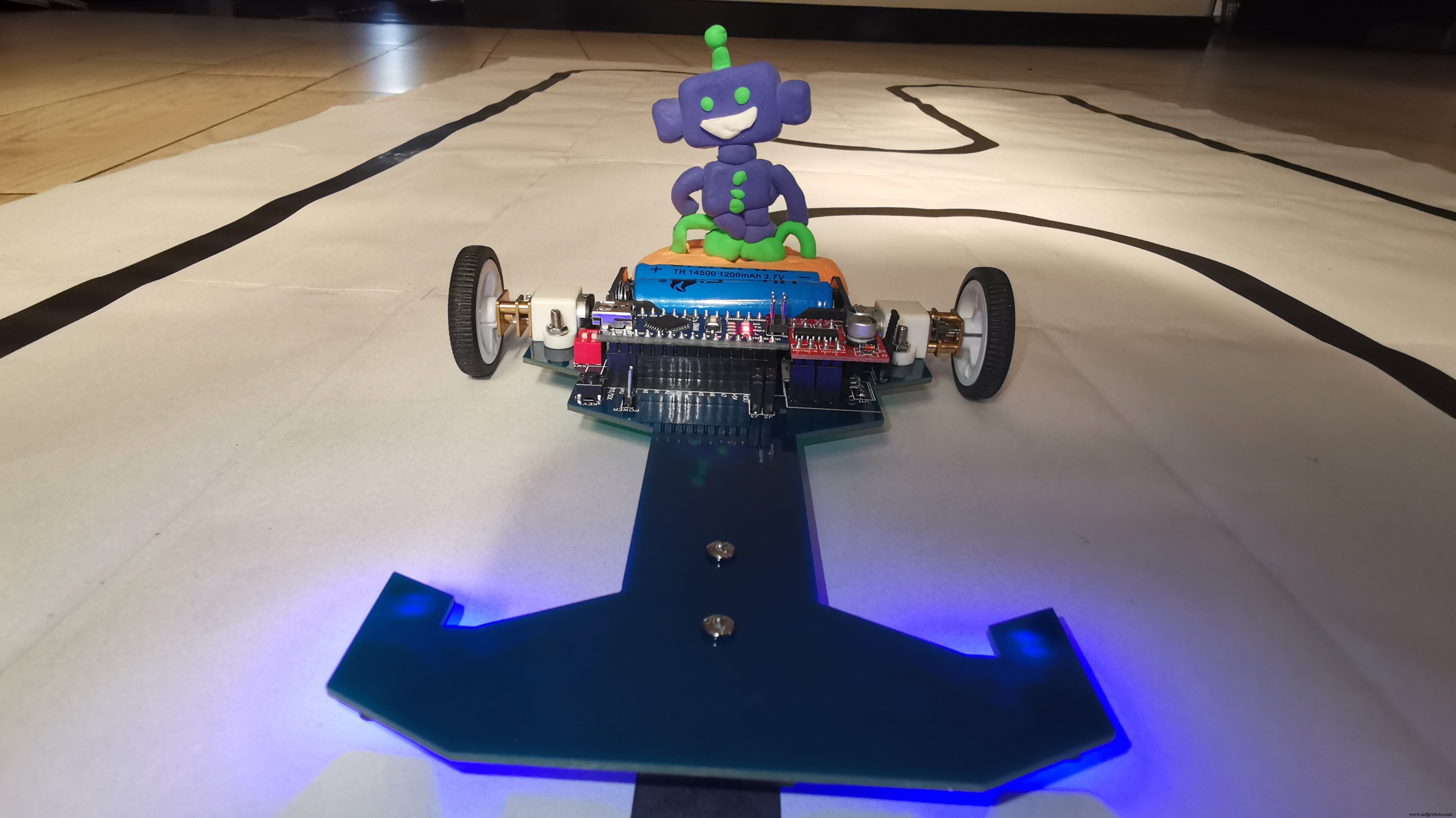
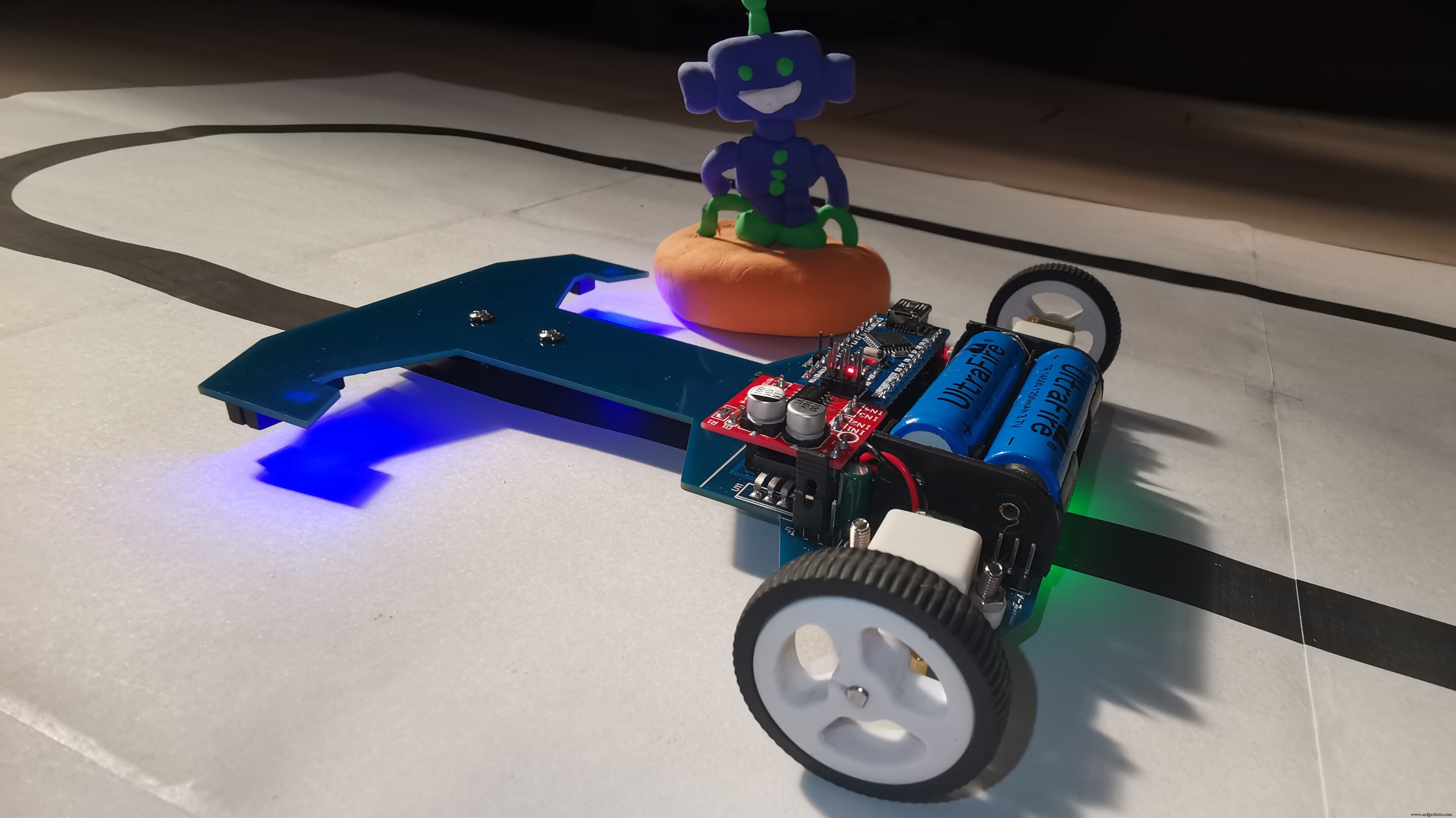
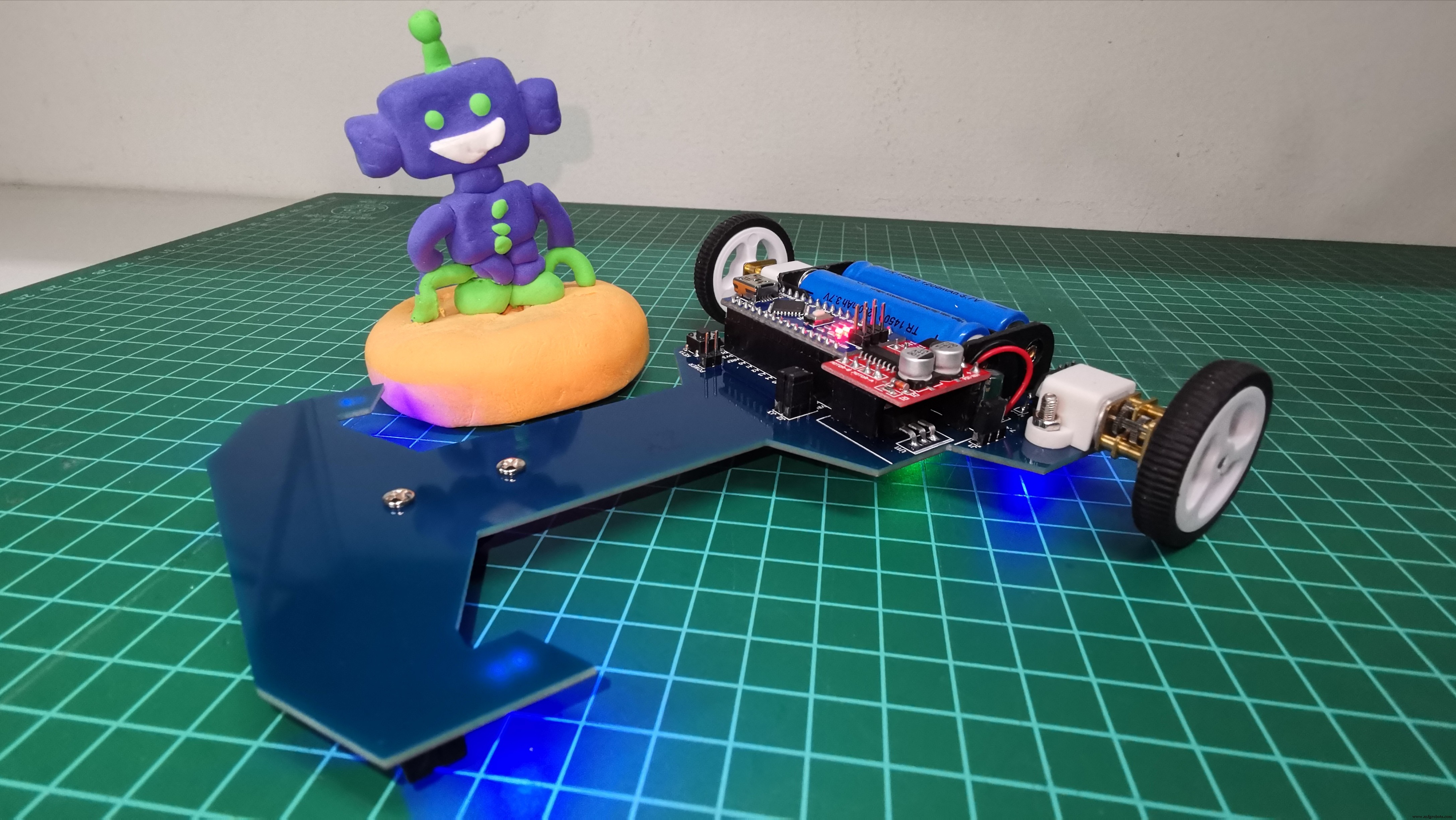
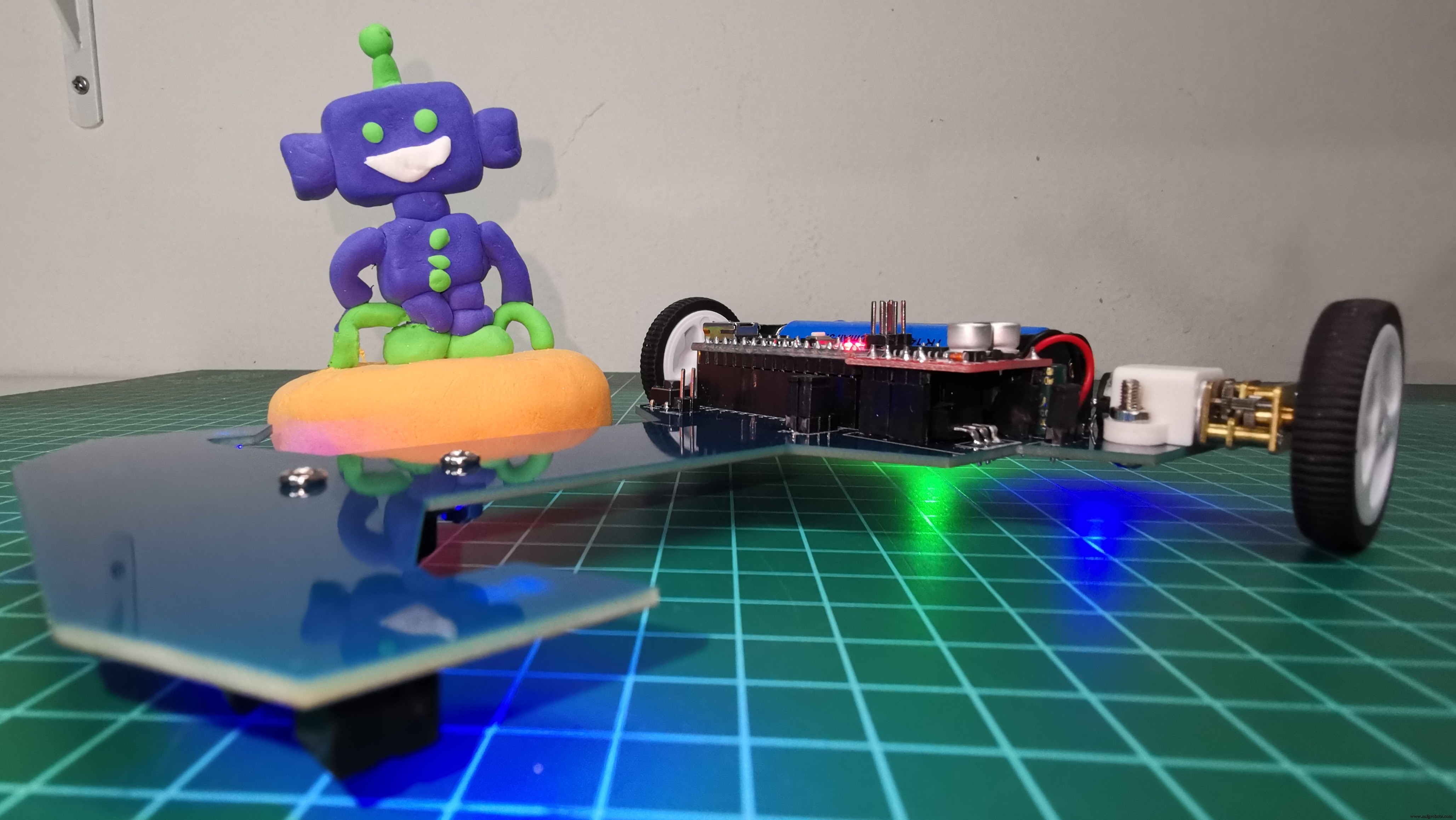
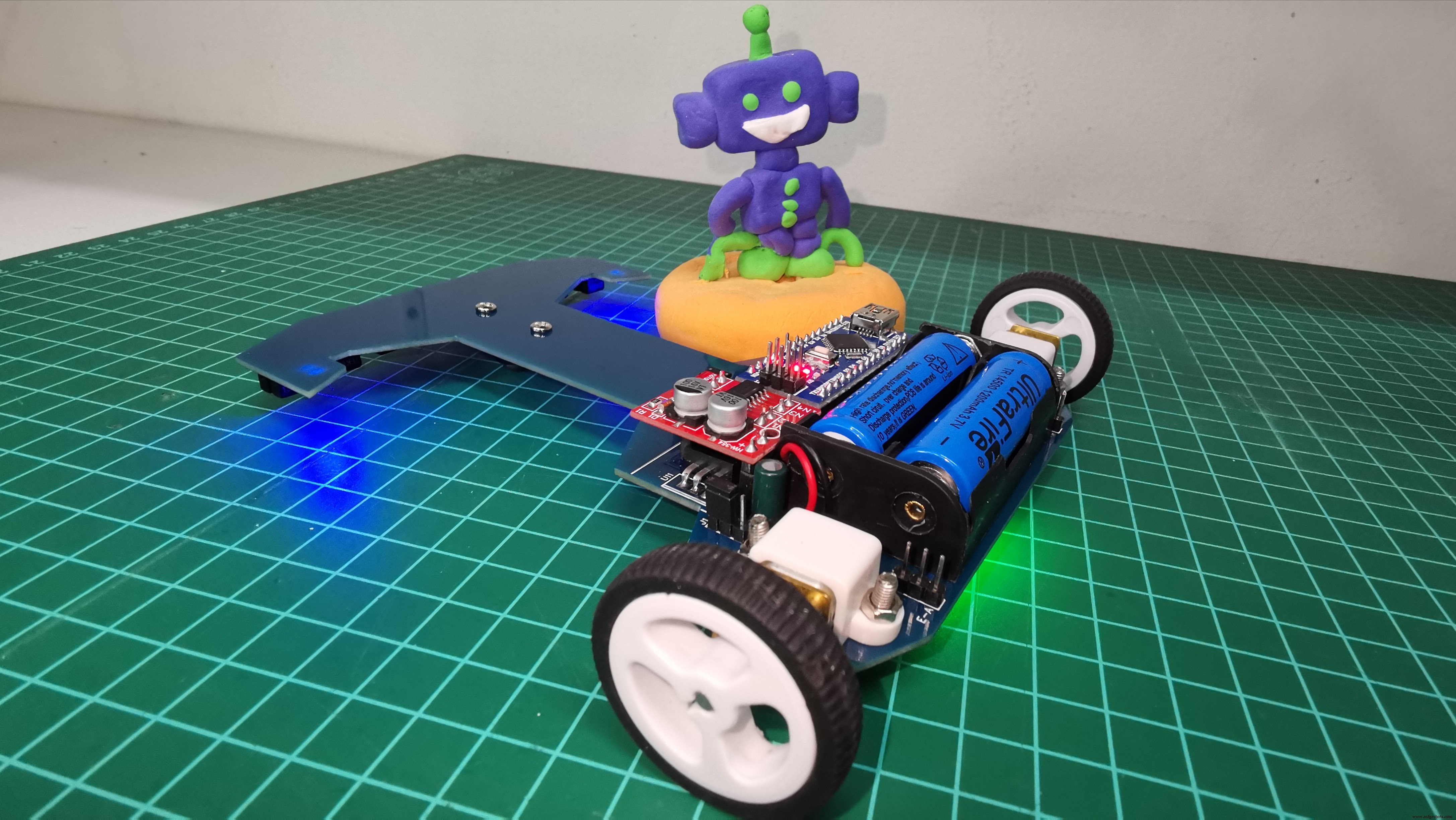
O vídeo a seguir mostra o resultado final do protótipo no qual incluí os modelos 3D projetados no TinkerCAD.
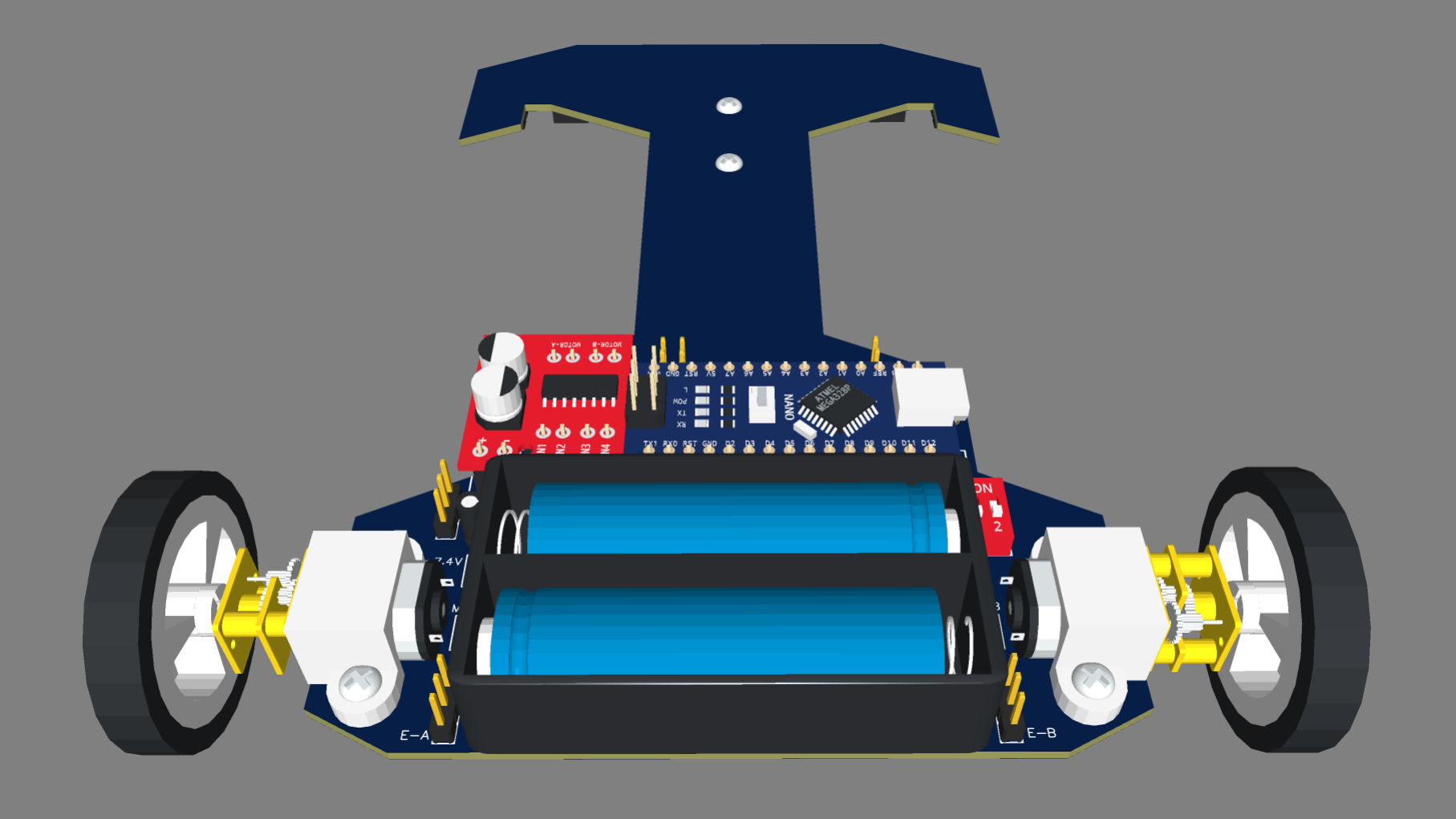
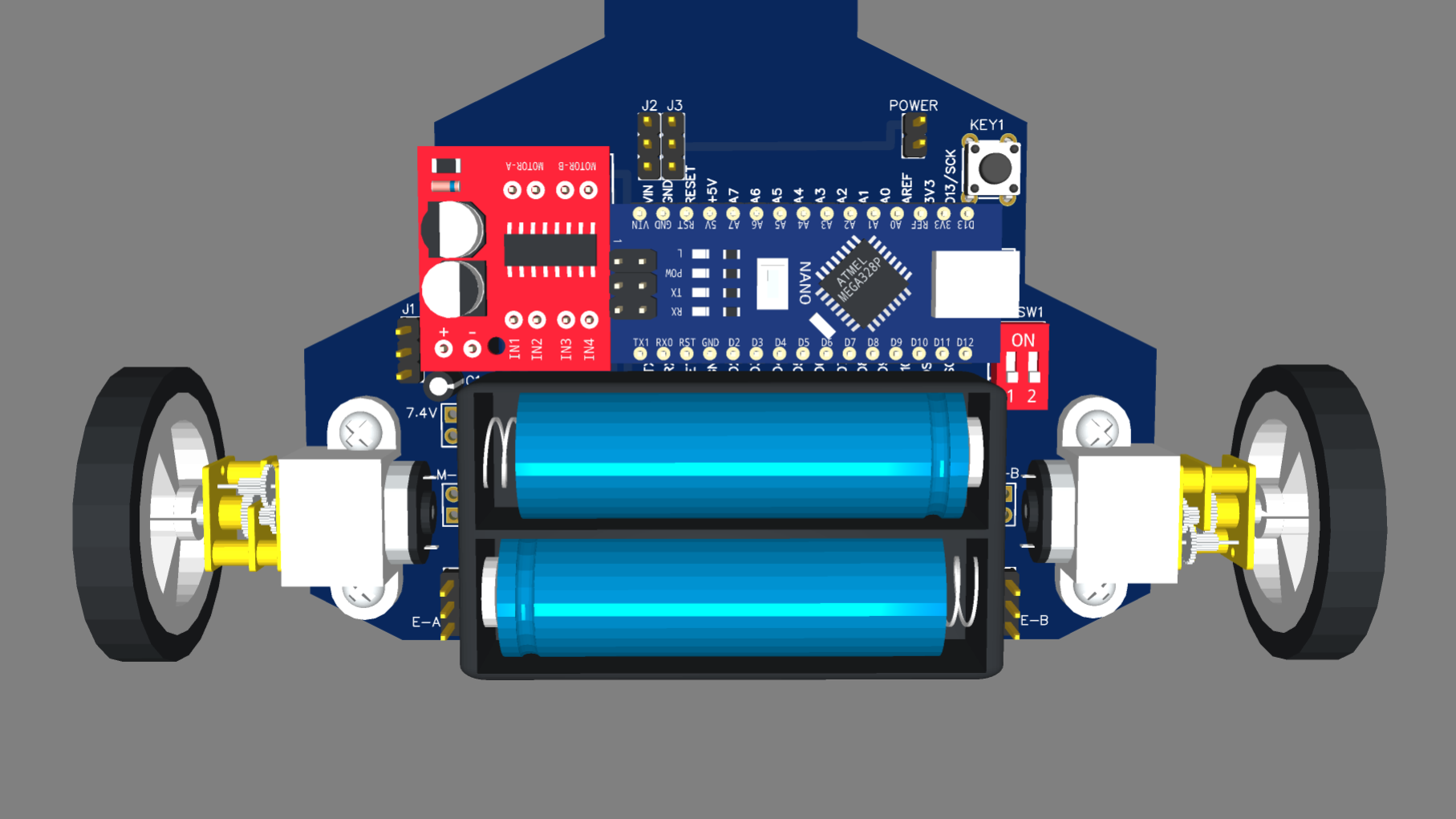
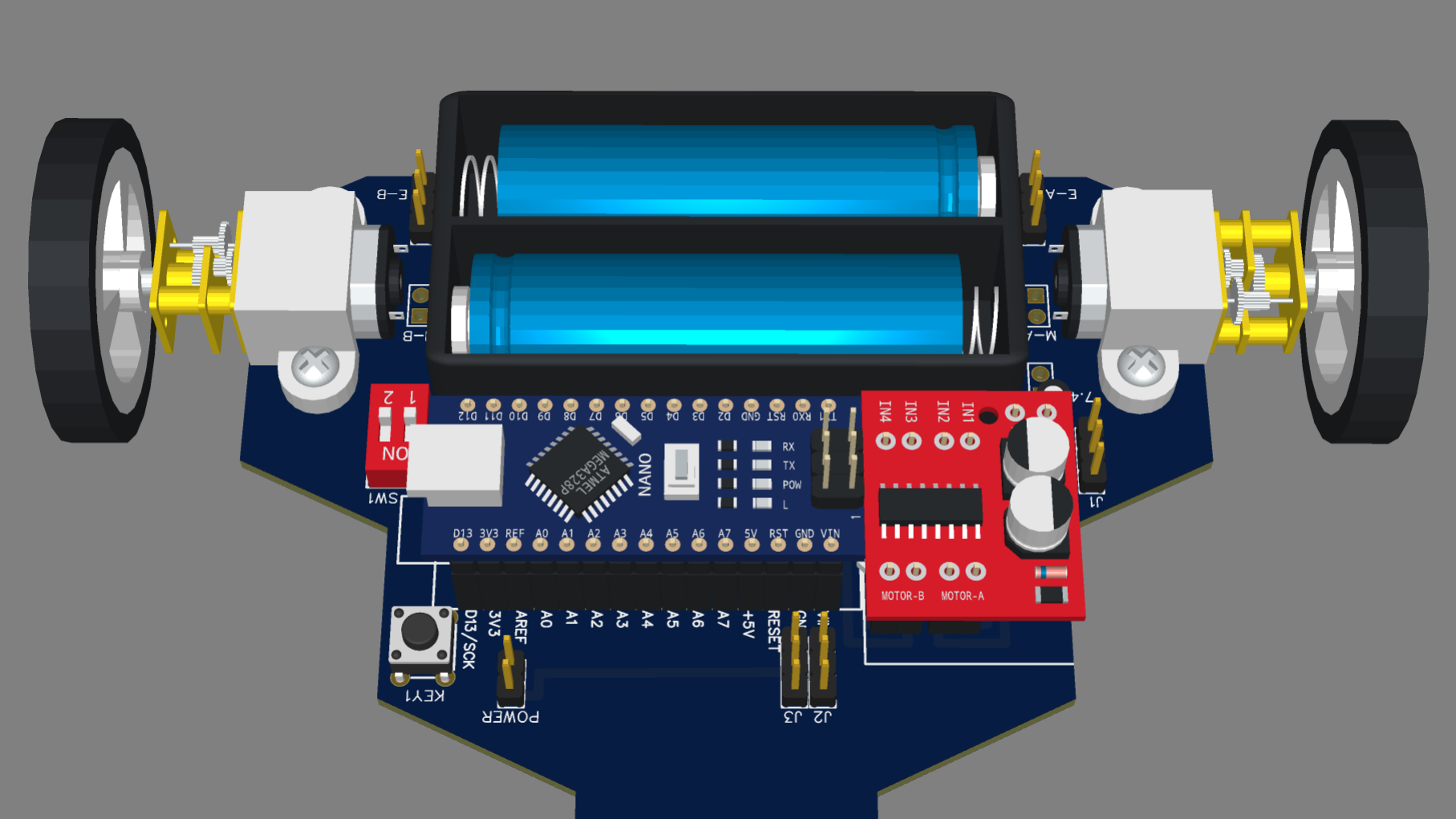
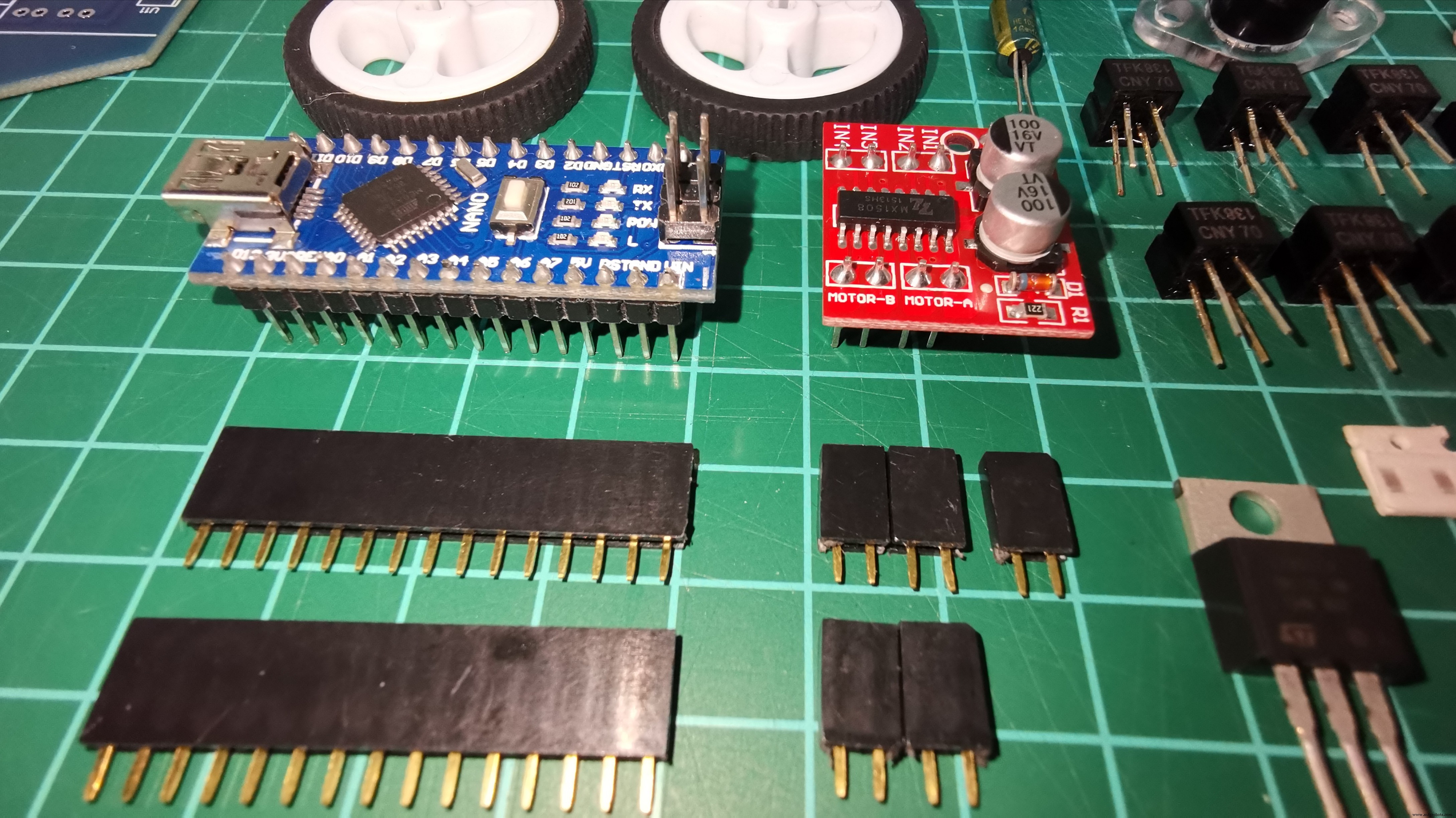
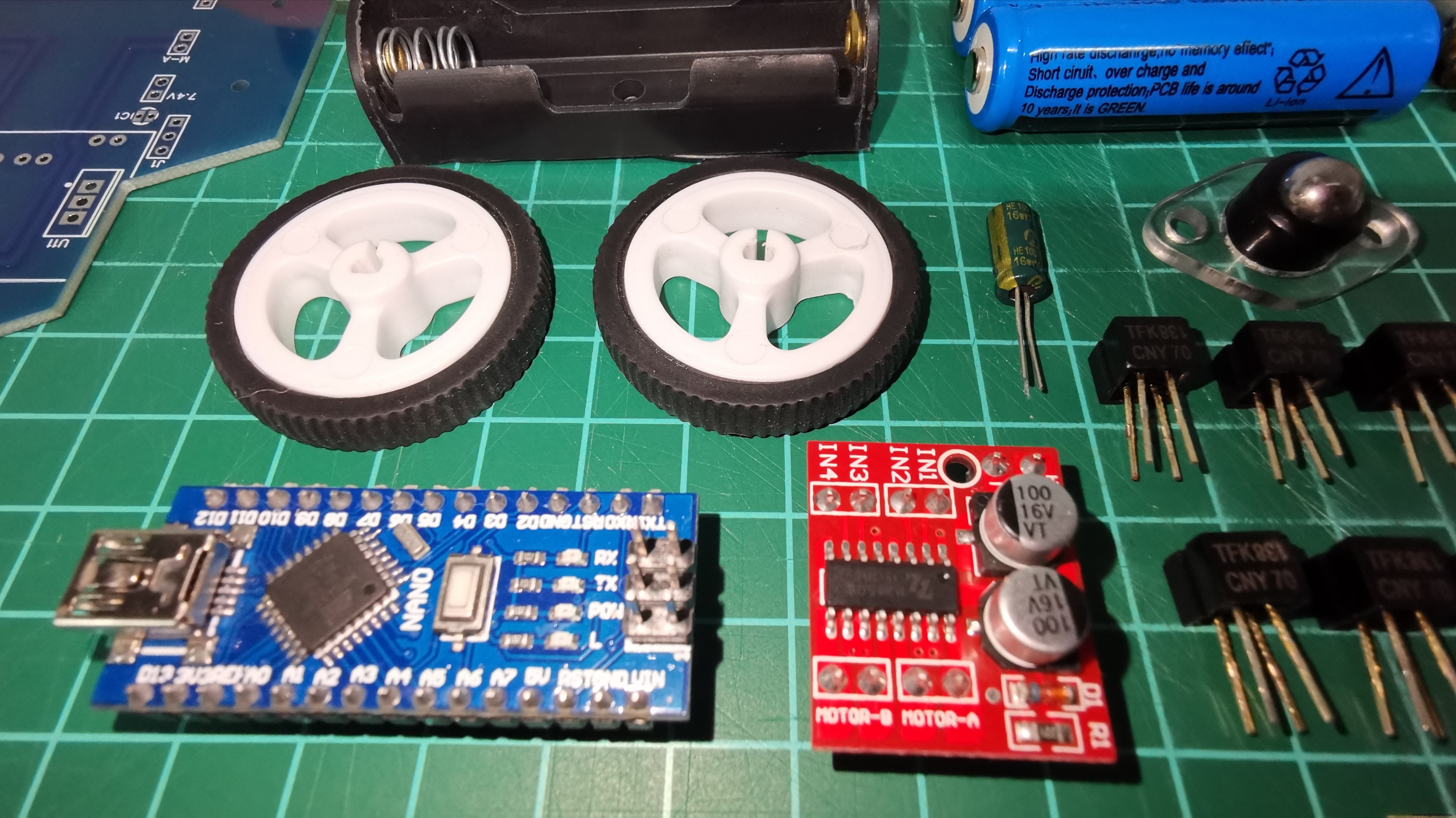
No vídeo a seguir, apresento os testes realizados com o Mini Motor Driver (MX1508).
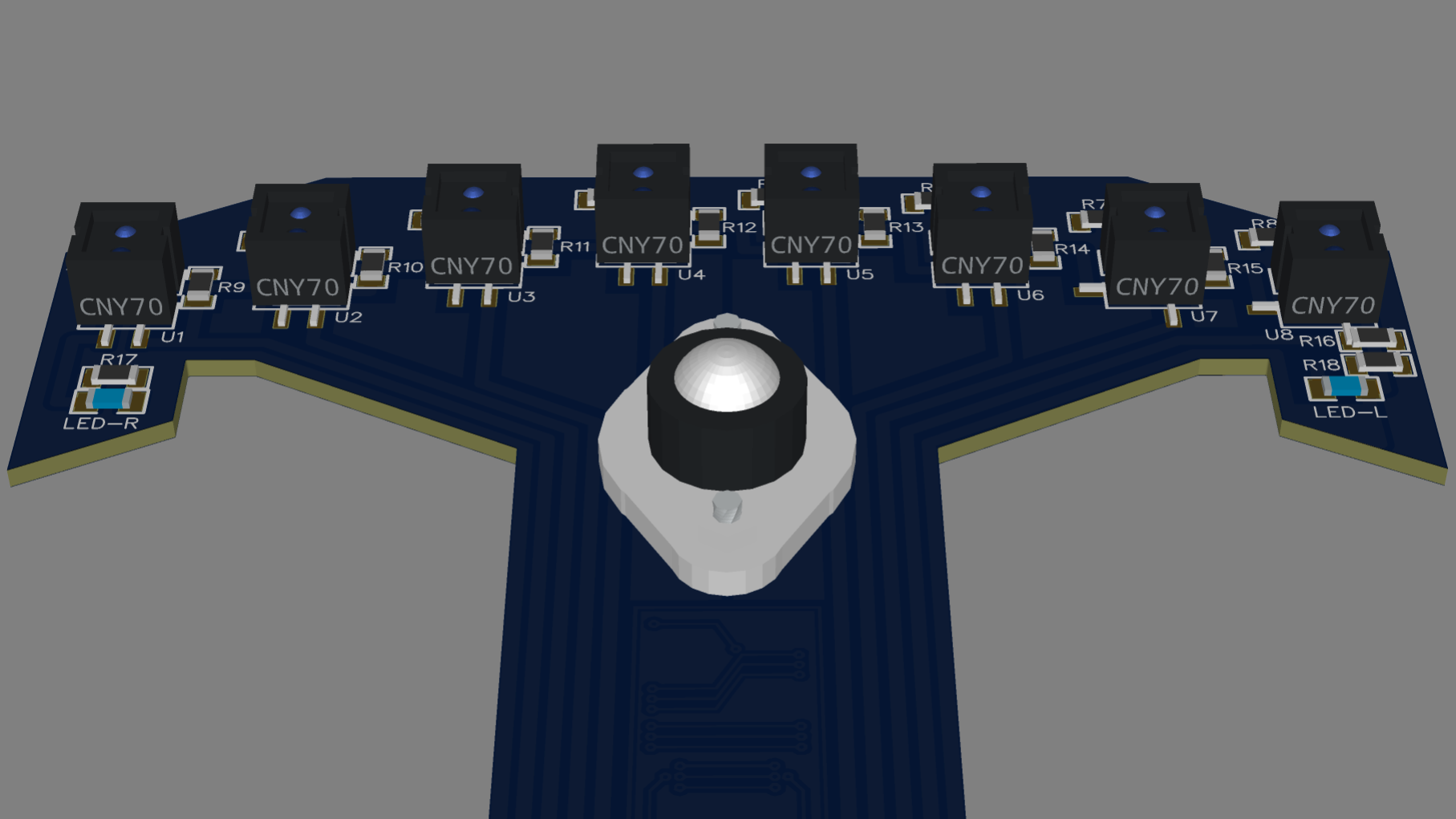
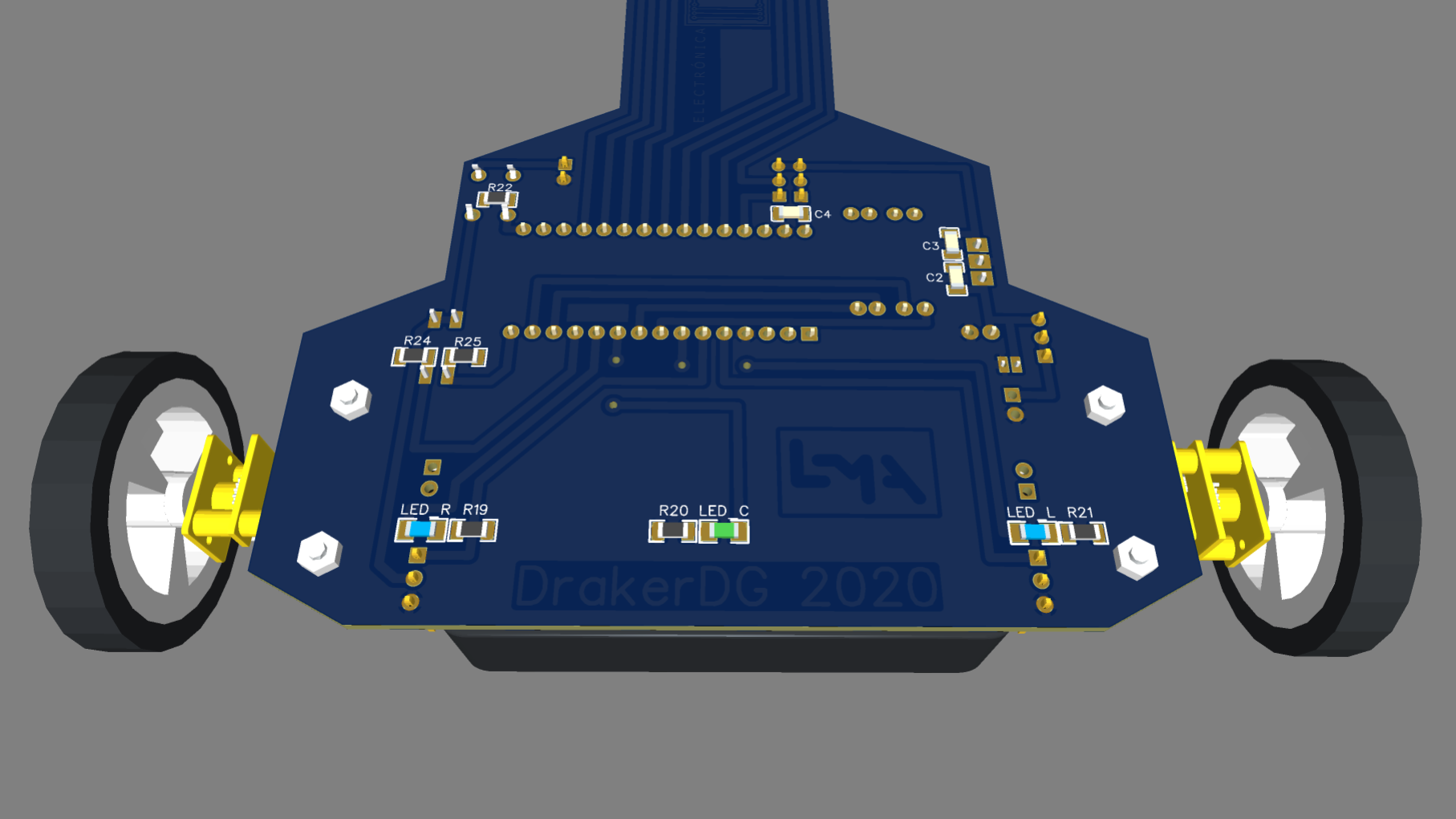
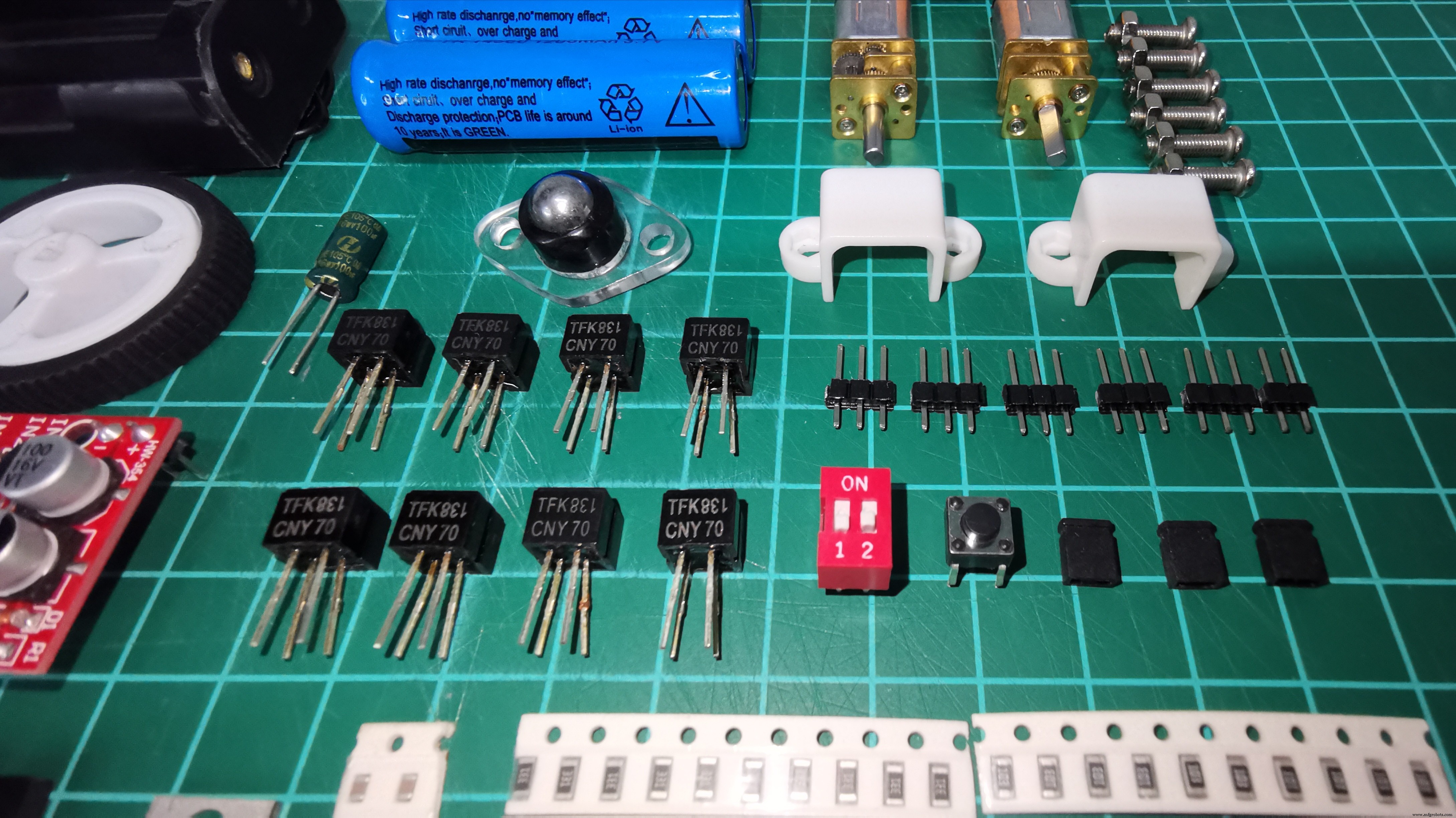
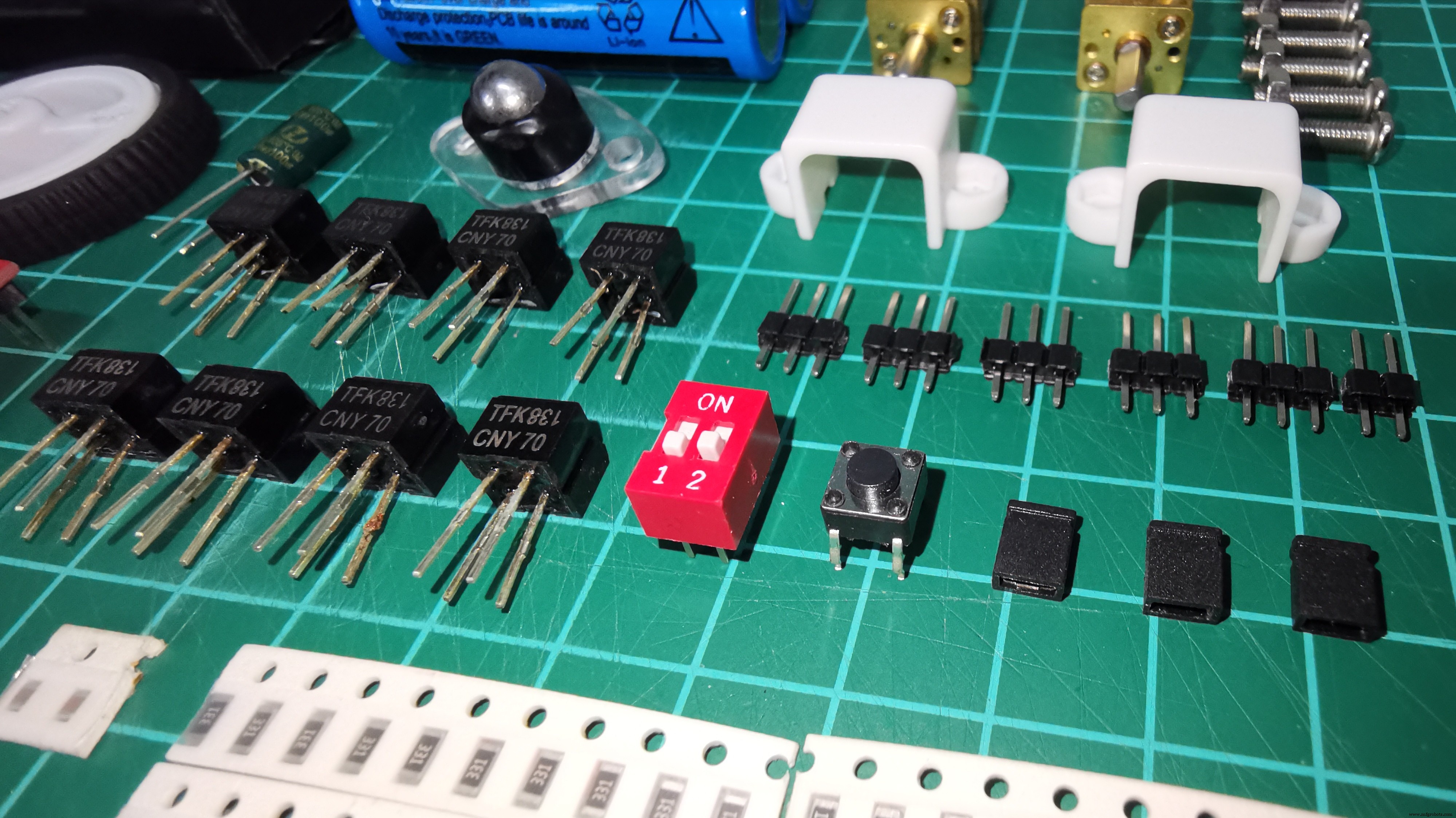
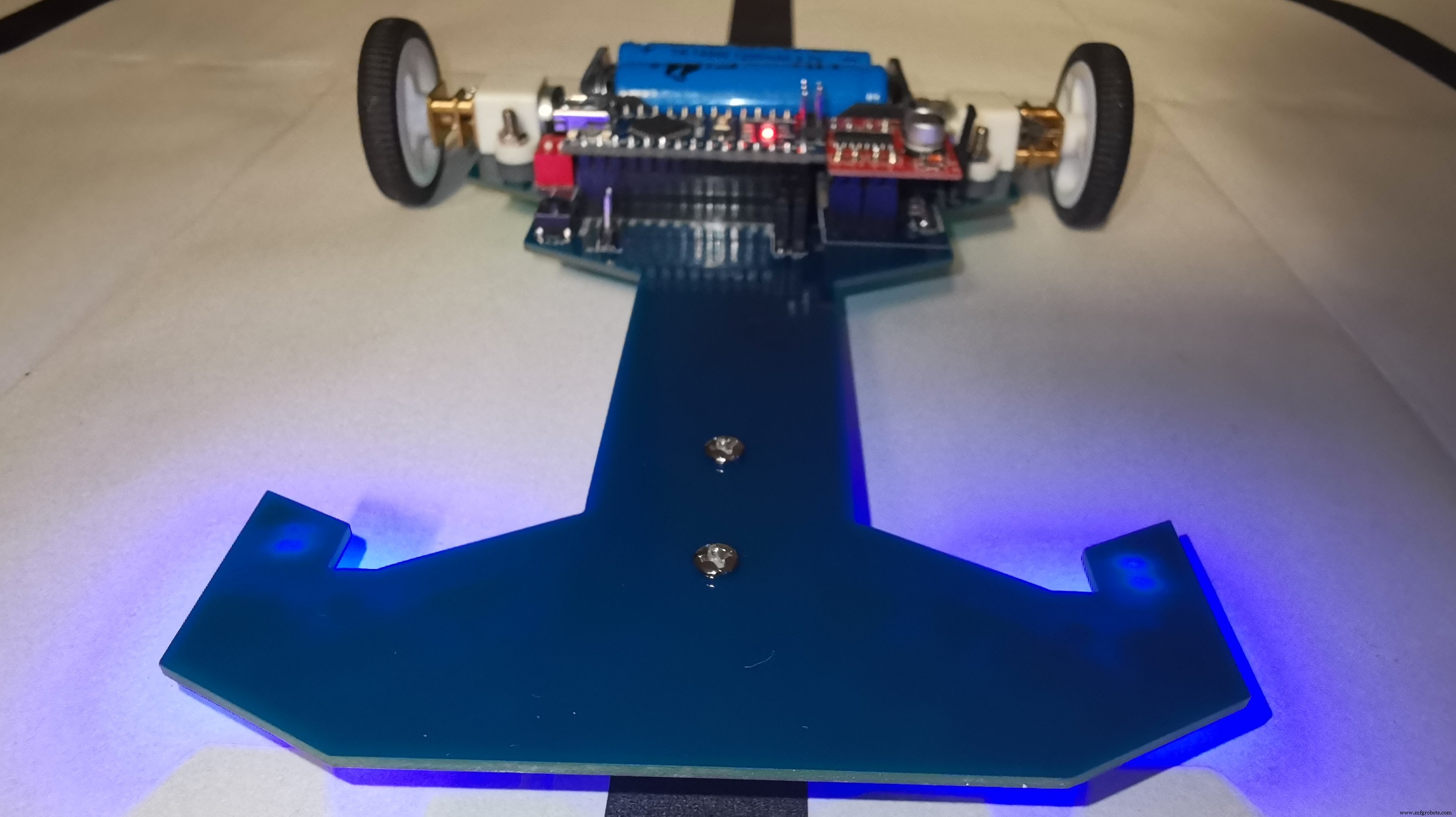
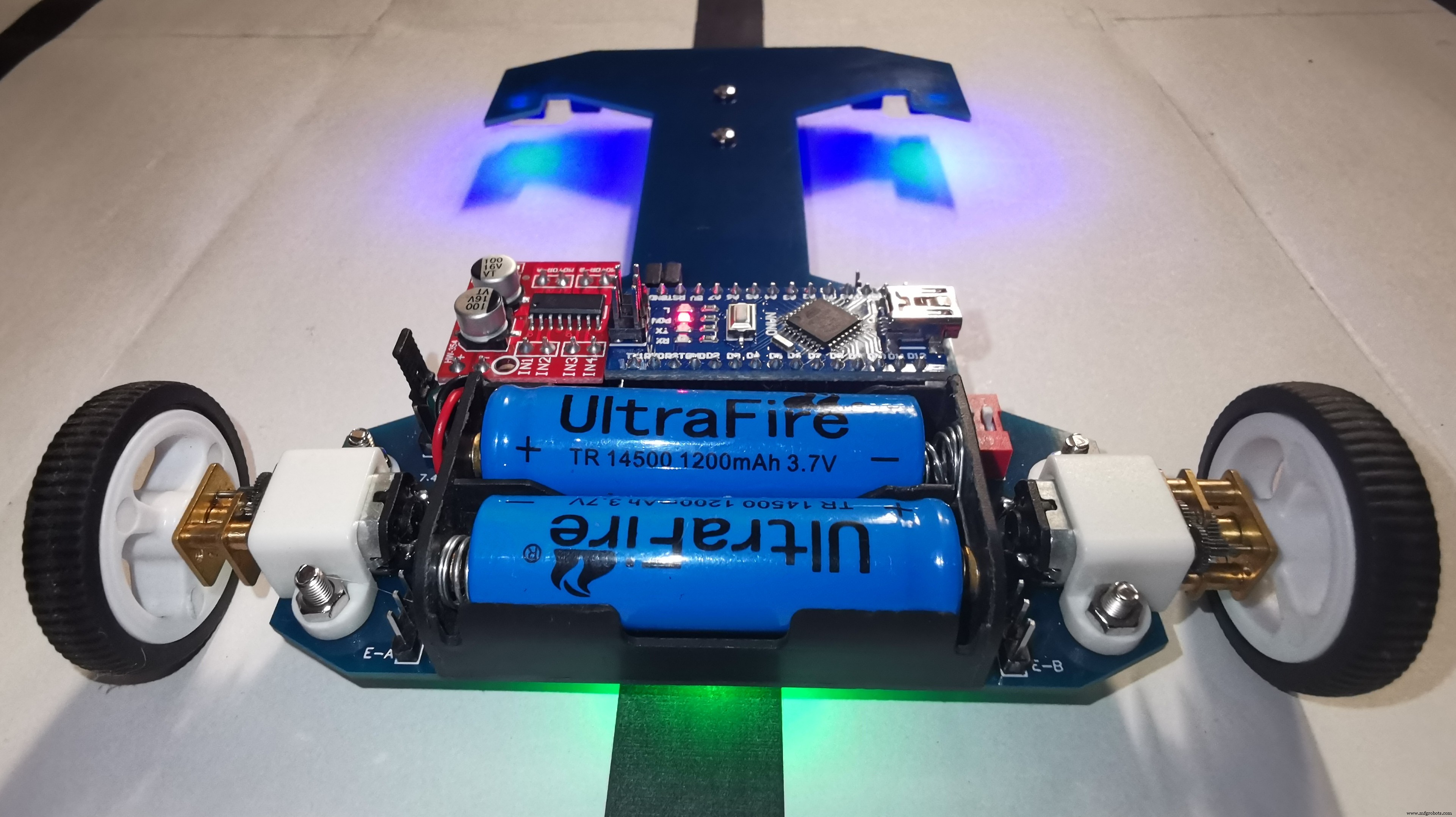
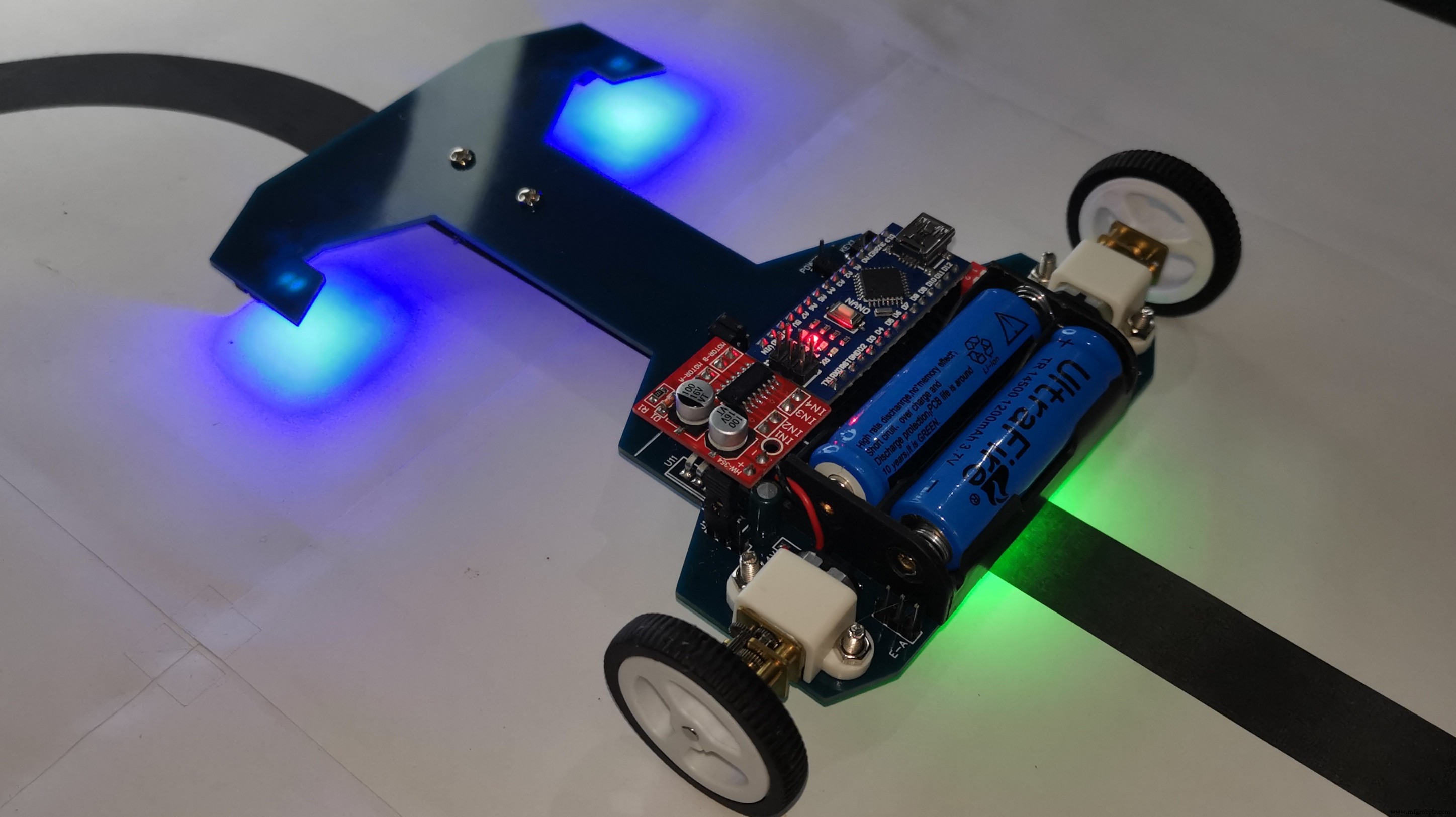
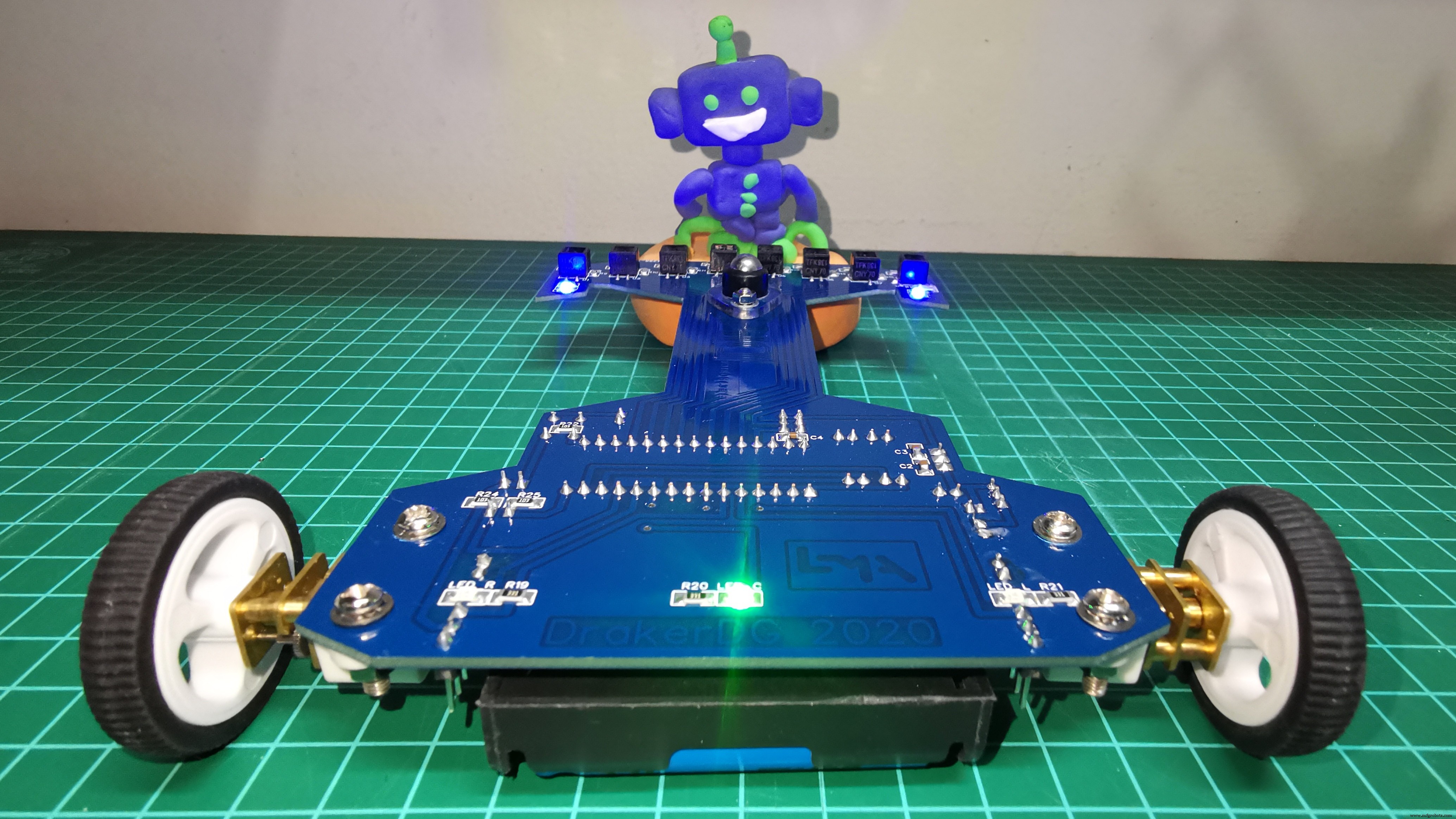
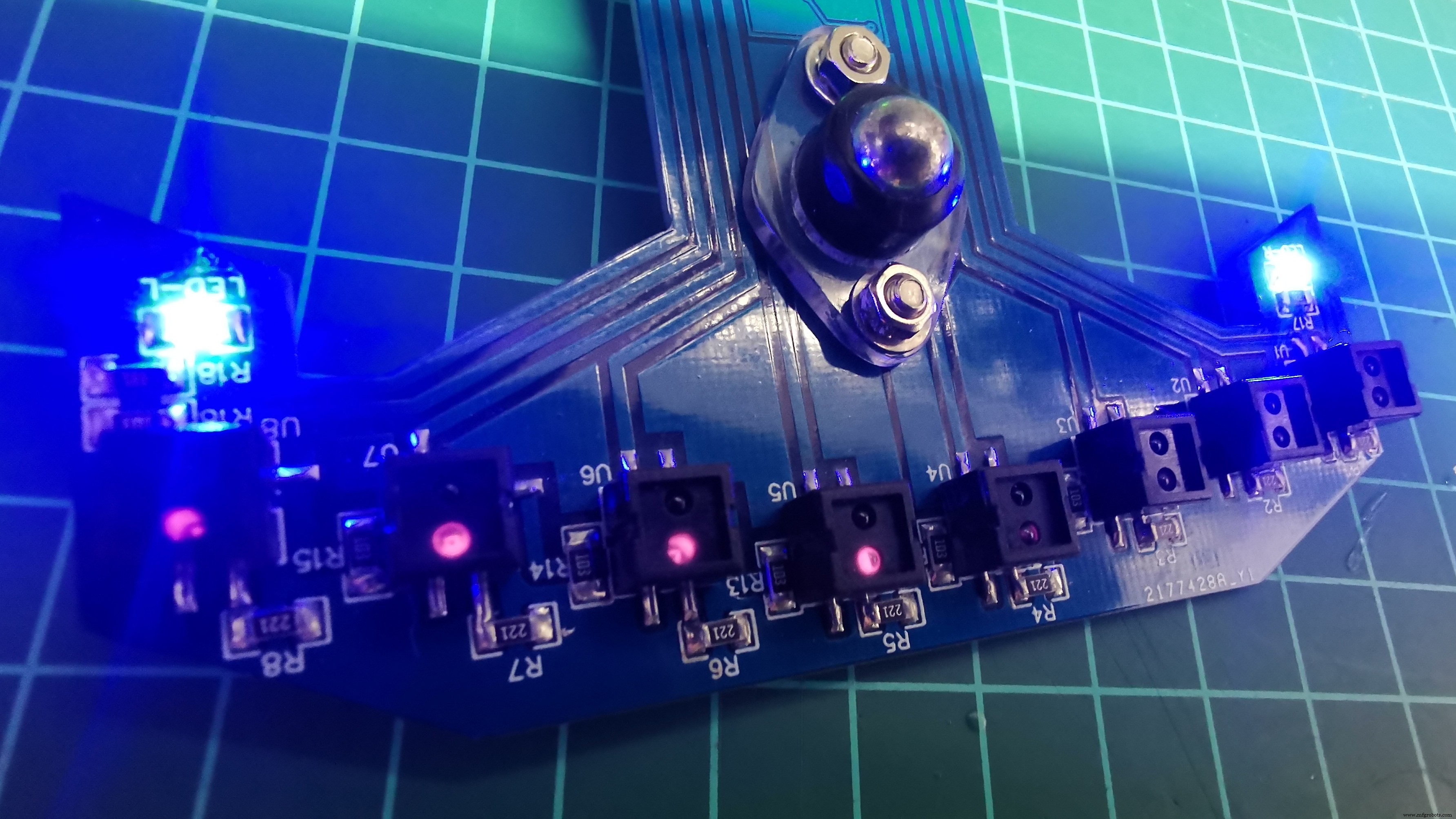
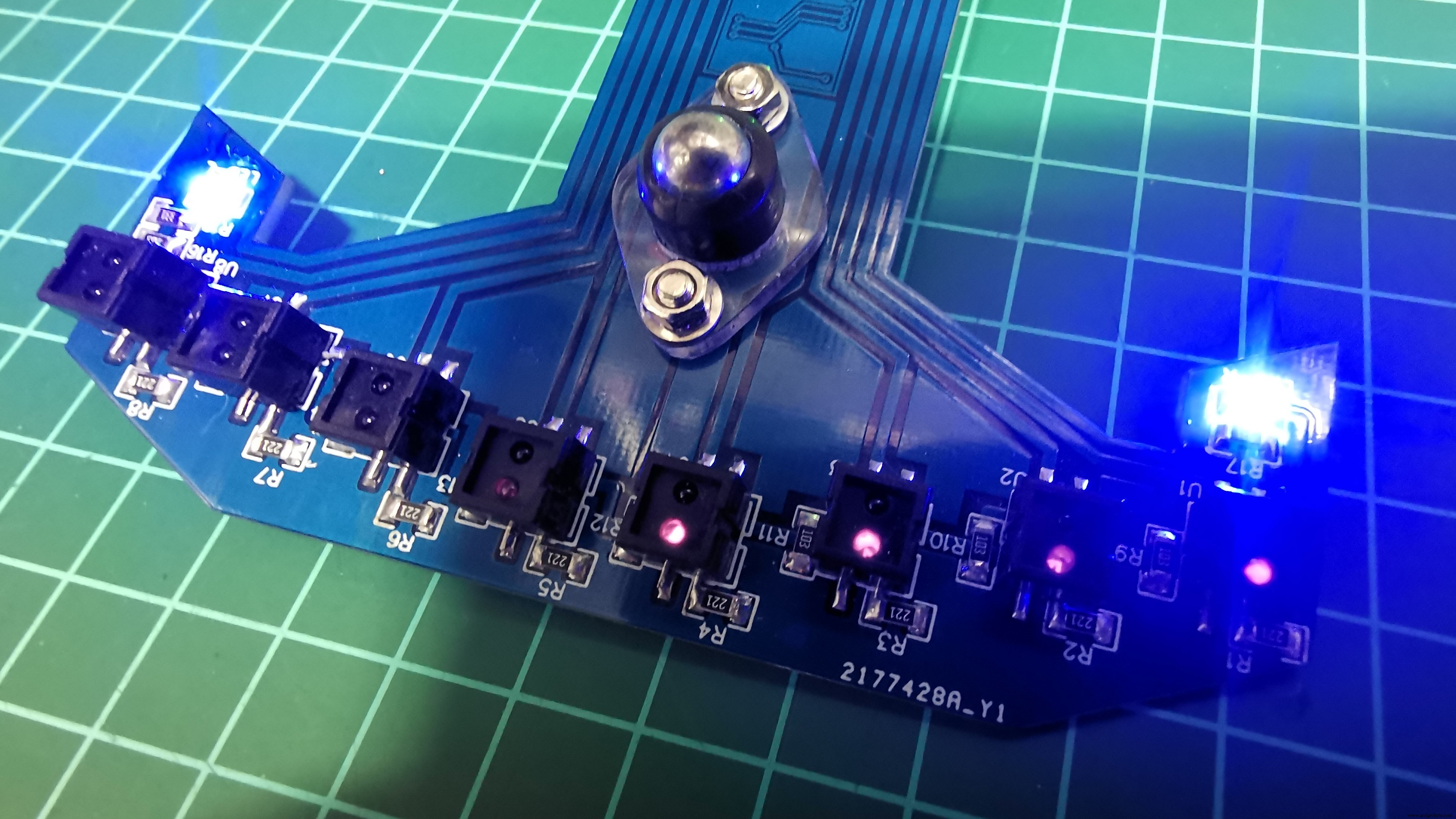
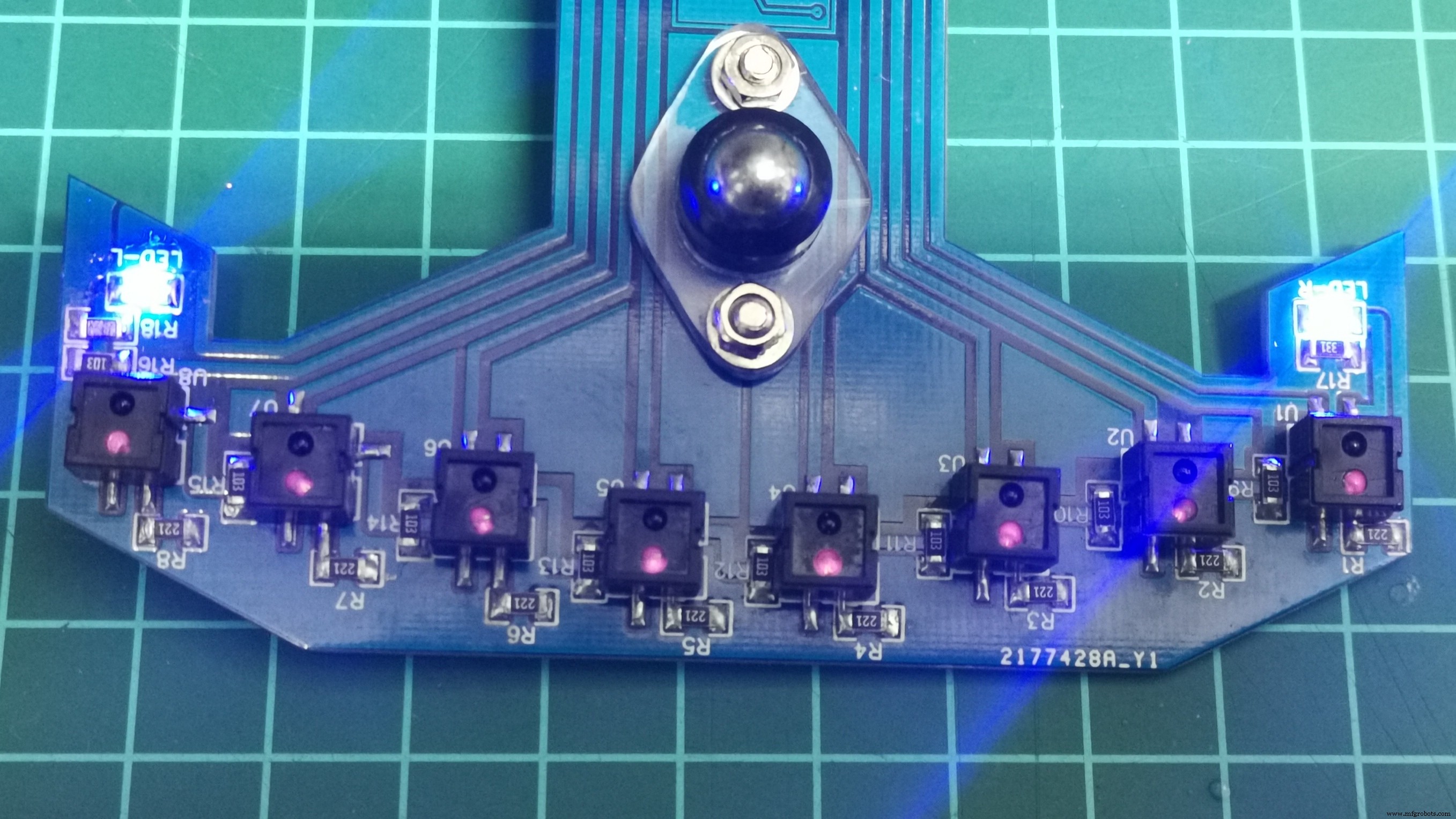
No próximo vídeo mostro os testes com os 8 sensores CNY70. Esses sensores são medidos analogicamente, através das portas A0 a A7 do Arduino Nano. Eu uso um algoritmo inicial para calibrar os sensores normalizando a faixa de 0 a 1000, onde 0 representa o fundo branco e 1000 a linha preta. Ao concluir a calibração, ele entra no loop e inicia o ciclo de leitura, calculando a posição de 0 a 7000, que representa o sensor esquerdo para o sensor direito respectivamente. Este valor de posição é usado para calcular o erro proporcional P. O intervalo de P é -3500 (esquerda) a 3500 (direita), com 0 sendo o valor central. O algoritmo memoriza o valor da posição do último sensor (esquerdo ou direito) que detectou a linha preta, com o objetivo de utilizar estes dados para ações de frenagem e recuperação de linha.
O teste final com o circuito 95% montado, é mostrado no vídeo a seguir. Um último teste de amperagem com um consumo máximo de 200mA.
Esta é a última versão do circuito impresso do robô, pronto para ser fabricado no JLCPCB.
Este é o unboxing.
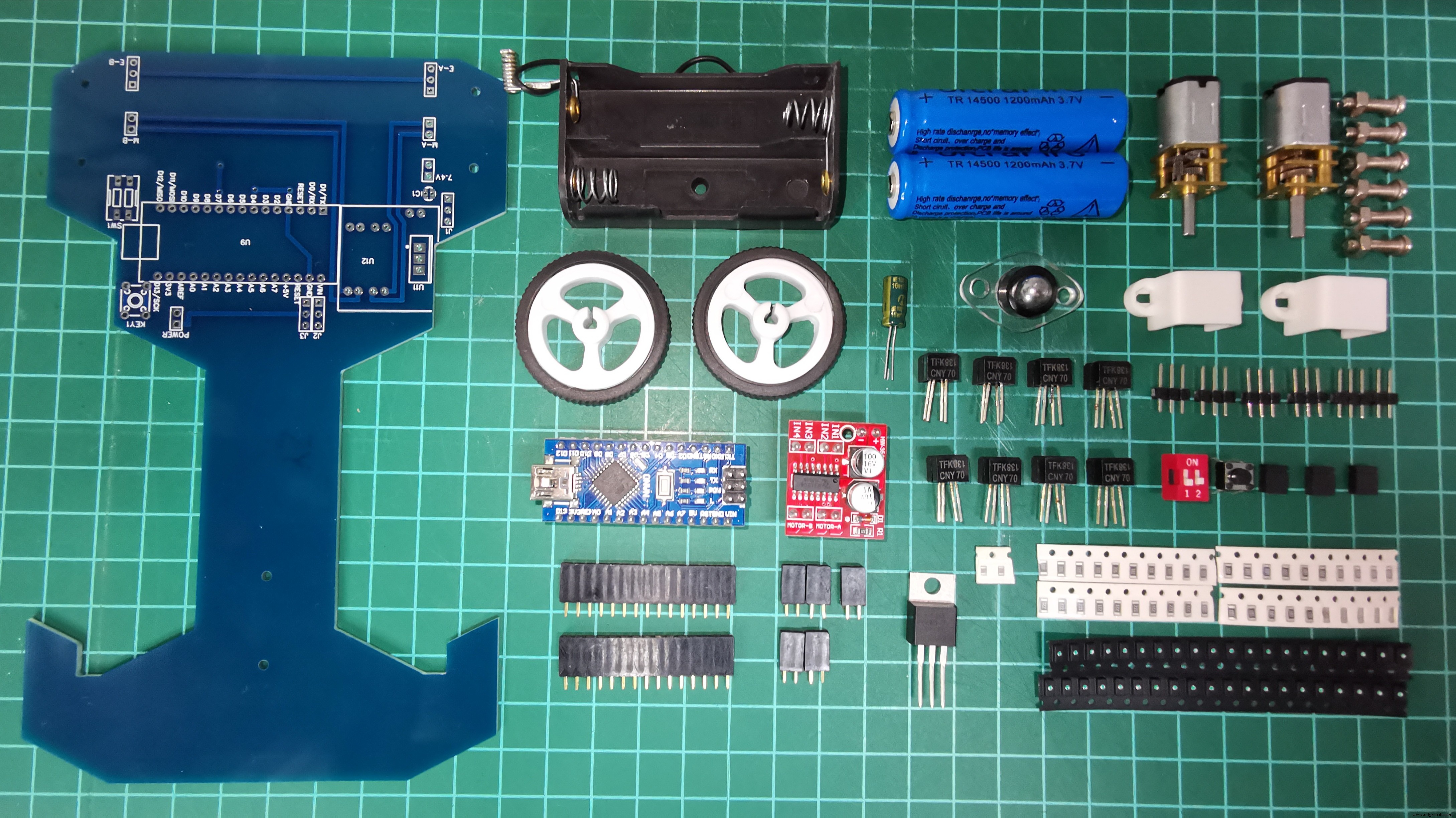
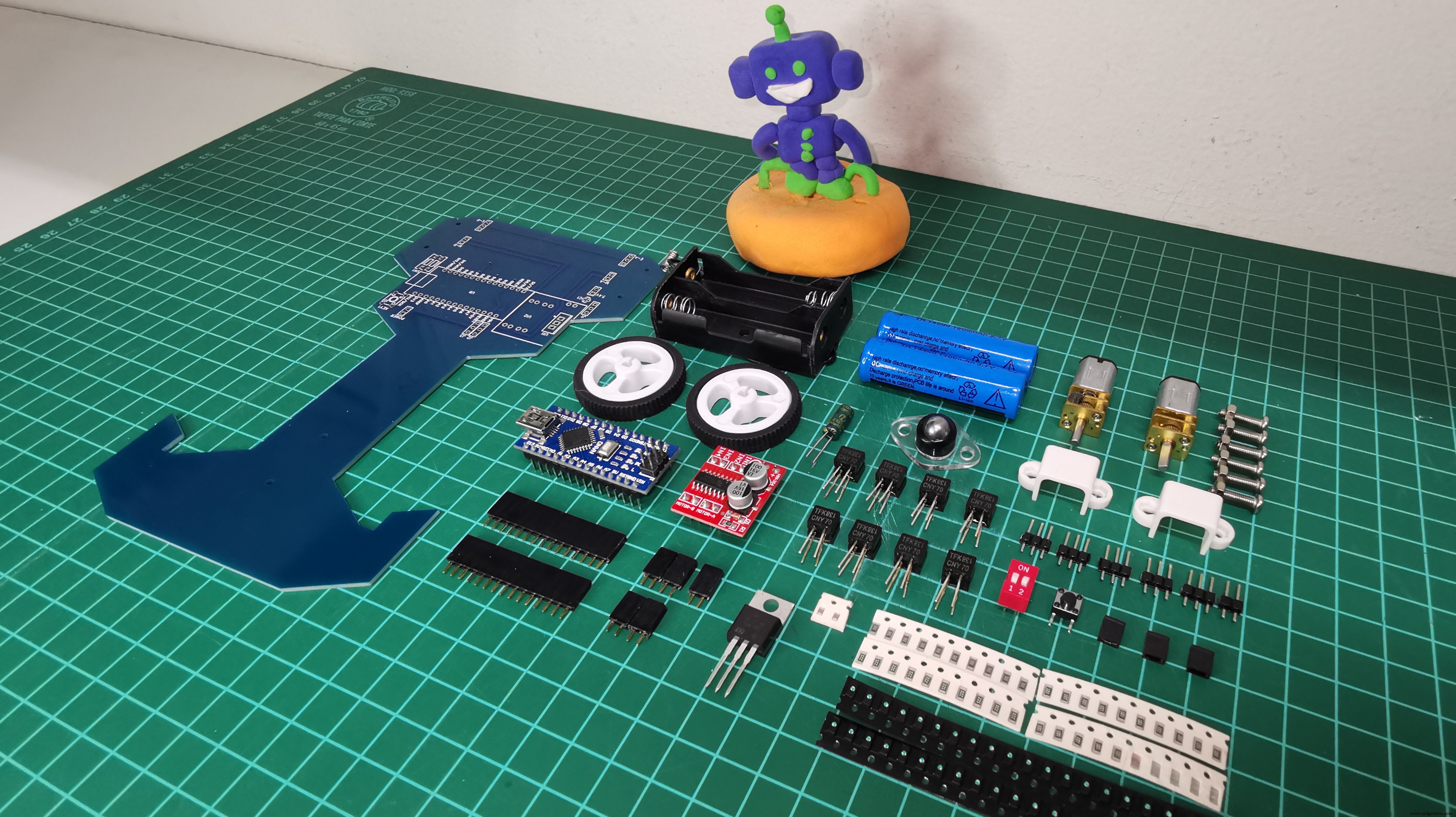




Na reta final e já com o total de peças, apresento a montagem do meu primeiro Speed Follower Robot.
Por fim e com muito esforço já tenho o protótipo totalmente construído, mostro abaixo como carregar o código (Code Load Mode), como testar os sensores e claro os testes na pista. Muito feliz com a operação, o código de teste consegue controlar muito bem o código. Usei um algoritmo PID (completo) para suavizar as correções e recuperar o curso da linha. Como tudo pode ser melhorado, continuarei a brincar com o código para obter uma versão mais eficiente.


Como complemento, fiz a simulação deste robô na aplicação Webots. Ainda está em processo de melhoria, mas compartilho este vídeo para que vocês possam apreciar uma forma de realizar testes mecânicos e lógicos (Código) para controlar um robô em um ambiente virtual e que ajuda a entender o funcionamento de um robô construído fisicamente.
Código
Código para controlar o Robô Seguidor de Linha de Velocidade V4
https://github.com/DrakerDG/Speed-Line-Follower-Robot/commit/12a807aed92c570dce12452064a5d6fe5053cb71Esquemas
Processo de manufatura
- Robô da caixa de CD do Raspberry Pi
- Robô de alarme rotativo
- EMAR Mini - Robô de Assistência de Emergência
- Abra o Robô CV
- Robô ROS
- Moldagem por injeção:Robôs e Cobots mais rápidos
- Automação:Linha do robô redesenhada
- Linha do robô SCARA expandida
- O que torna um software de simulação de robô Top of the Line?
- Como funciona a linha de corte de precisão de alta velocidade?