


Arduino DMX-512 Tester Controller
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
| × | 5 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 6 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 4 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Sobre este projeto
Ferramenta de controle para teste e show de luz pelo protocolo DMX-512, ideal para testes rápidos em instalações fixas ou temporárias de iluminação. Este projeto surge da necessidade de se ter um sistema portátil para testes rápidos em instalações de iluminação, sem a necessidade de instalar consoles de iluminação, interfaces ou computadores em ambientes externos, hostis ou de difícil acesso.
Baseado em:
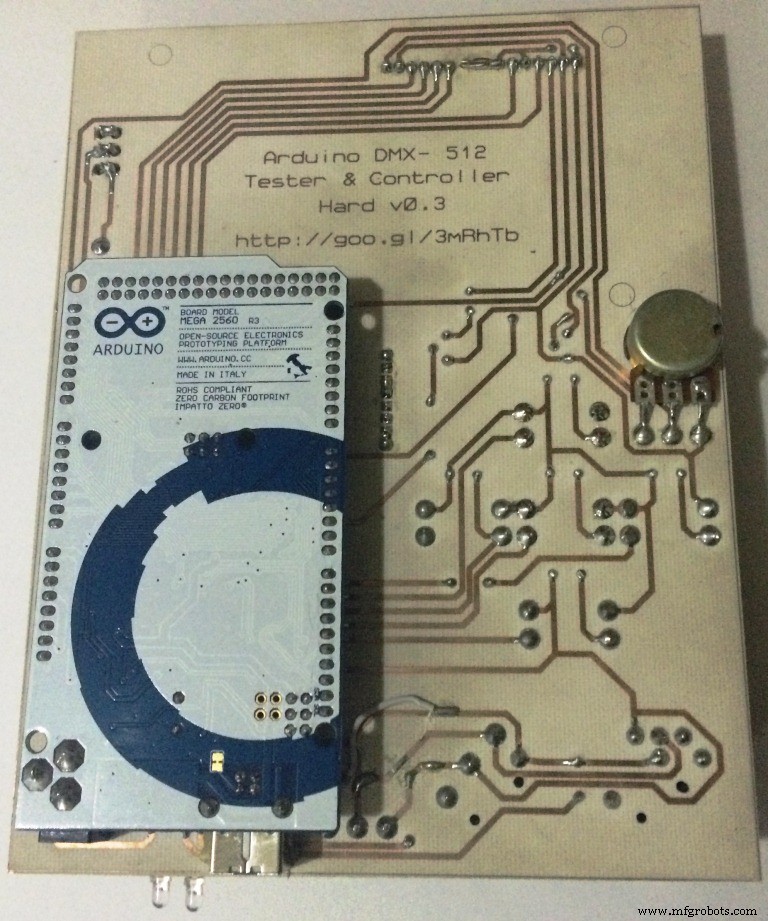
- Arduino Mega 2560 Rev-3
- Biblioteca Arduino de quatro universos DMX v0.3 - Deskontrol
- Biblioteca LCD v1.2.1 - Francisco Malpartida
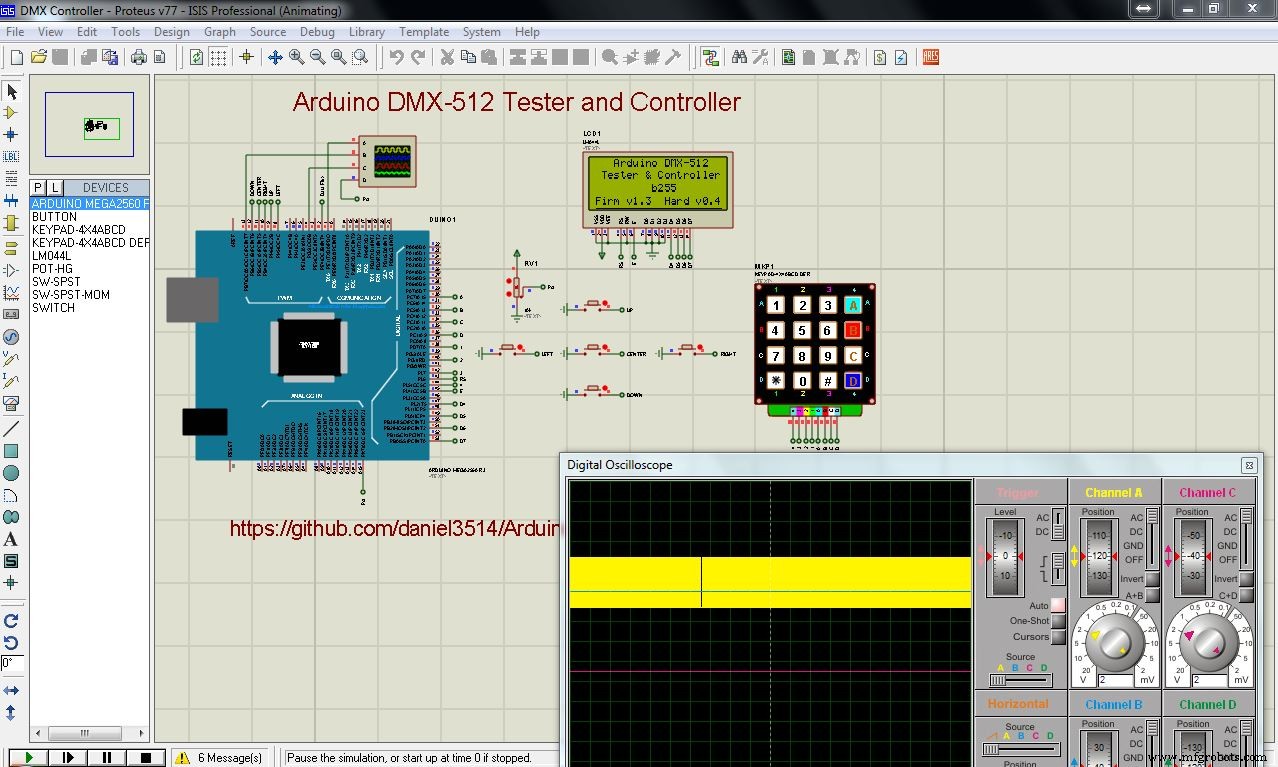
- Arduino da Proteus Simulation - Microcontrolandos
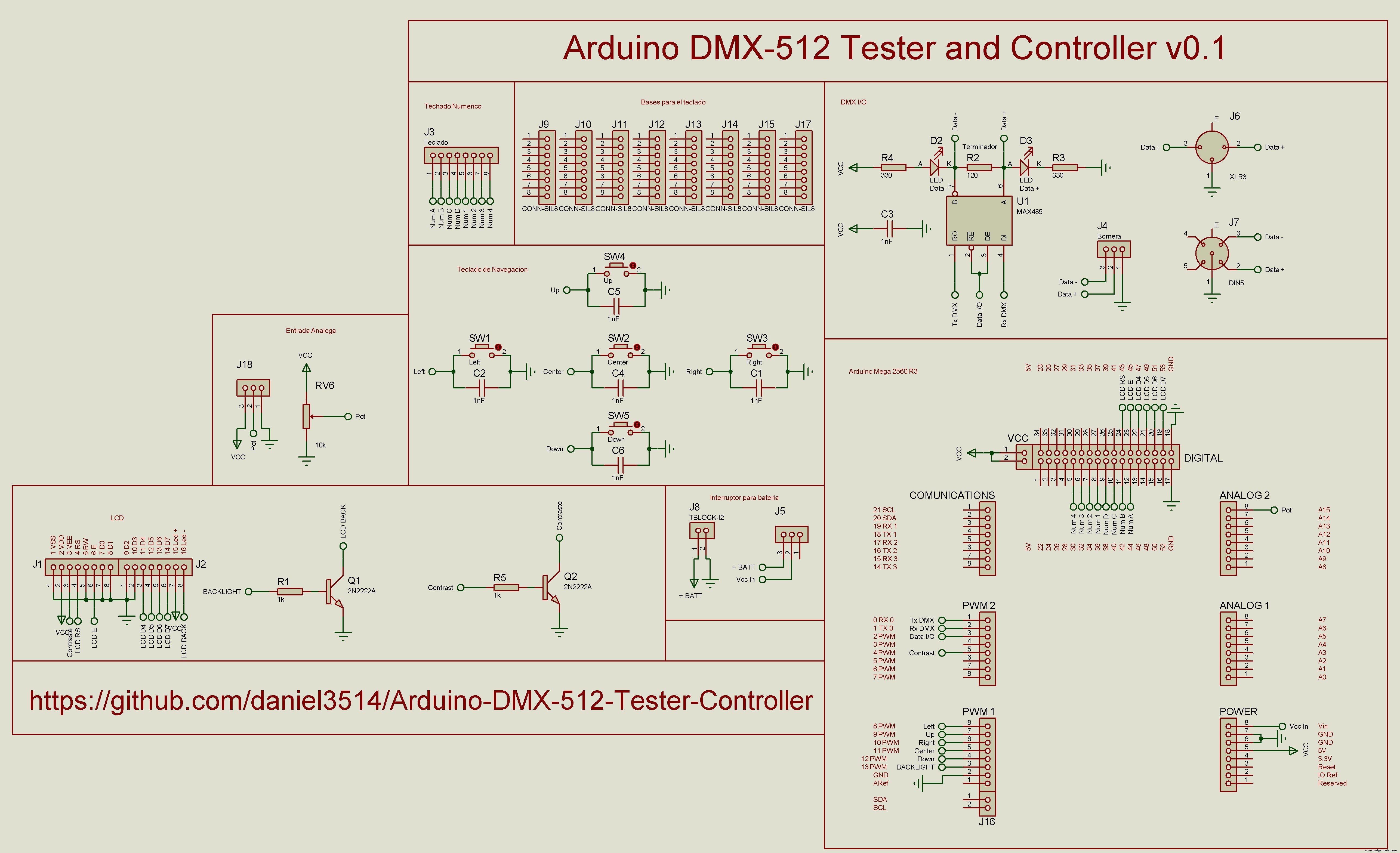
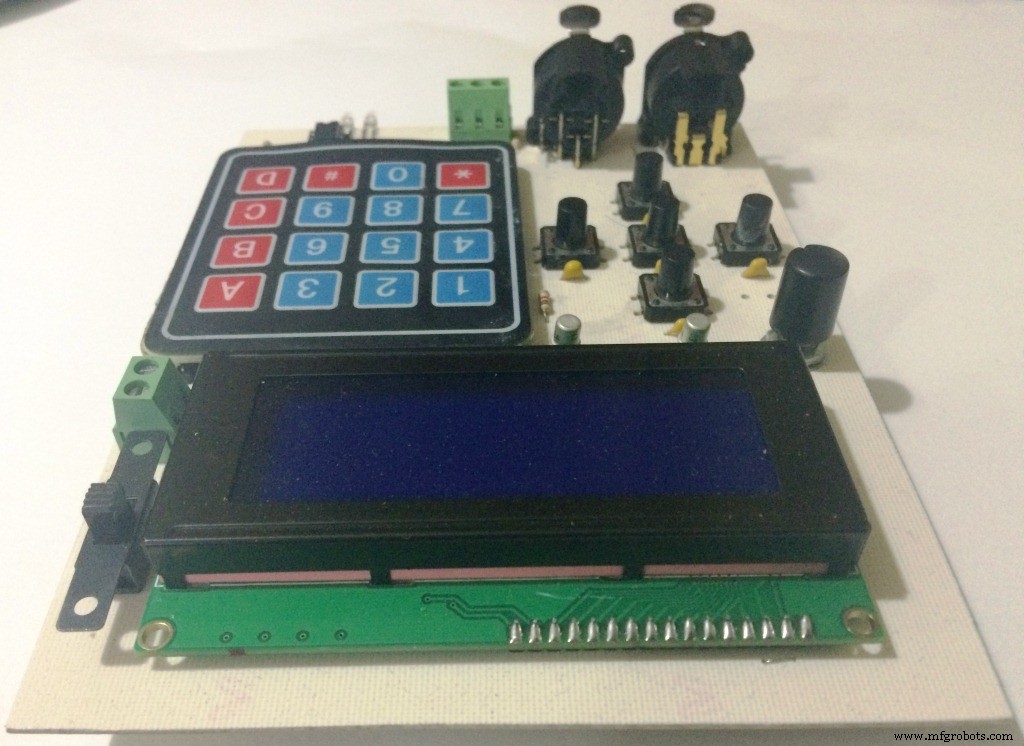
Hardware v0.4
Notas de versão ...
- Suporta Firmware v0.9 - v1.3
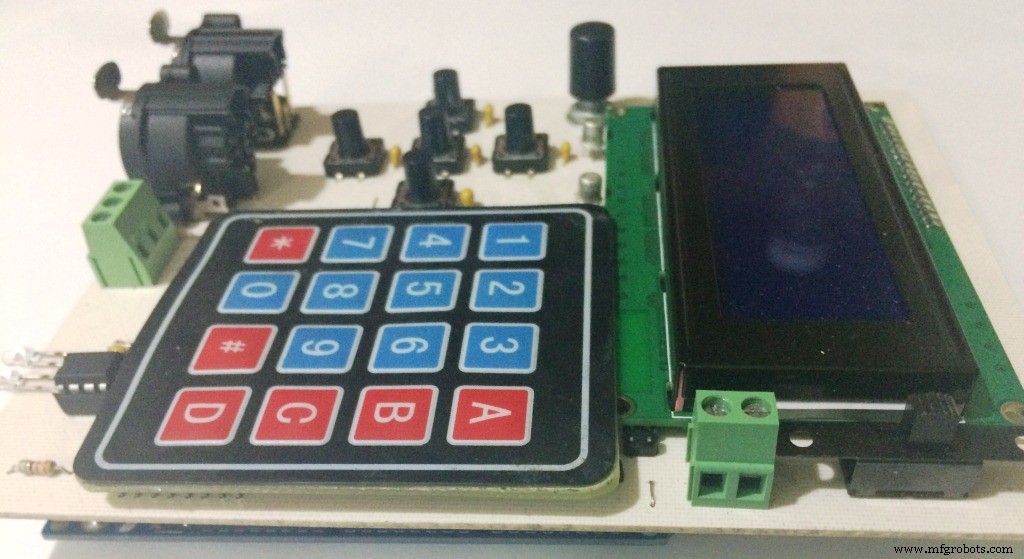
- LCD 4x20 com luz de fundo e contraste controlado por software
- Energia de USB, baterias ou fonte de alimentação externa
- Teclado de navegação
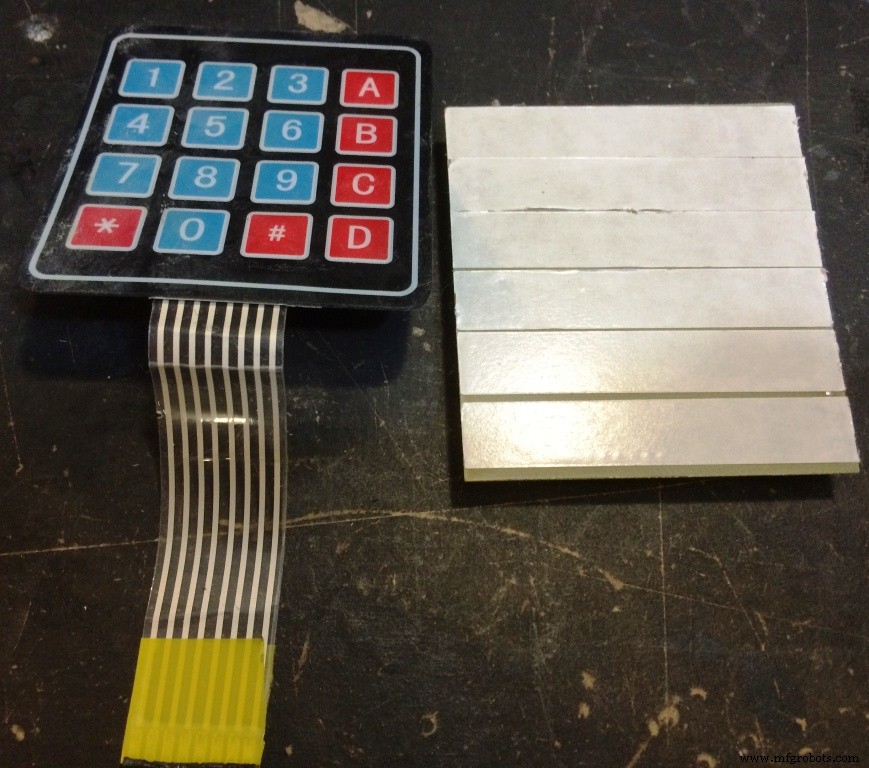
- teclado 4x4
- Potenciômetro de controle analógico
- Ligar / desligar (não aplicável à alimentação USB)
- Saída DMX do bloco de terminais, XLR de 3 pinos e XLR de 5 pinos
- LEDs de status de saída DMX
- Simulação em Proteus V7.7 SP2
- Esquemático e PCB no Proteus v8.0 SP1
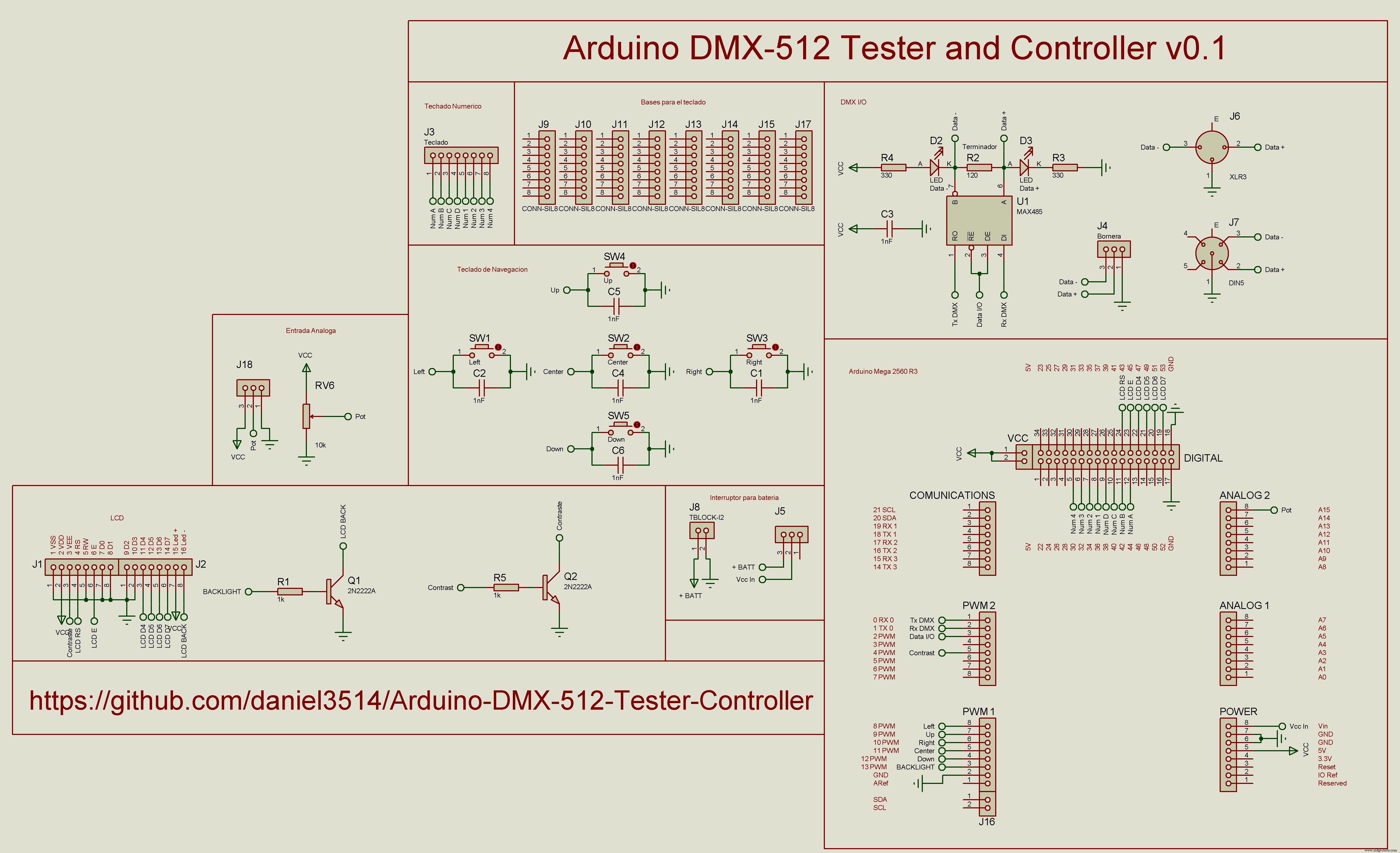
Esquemático
PCB

Simulador
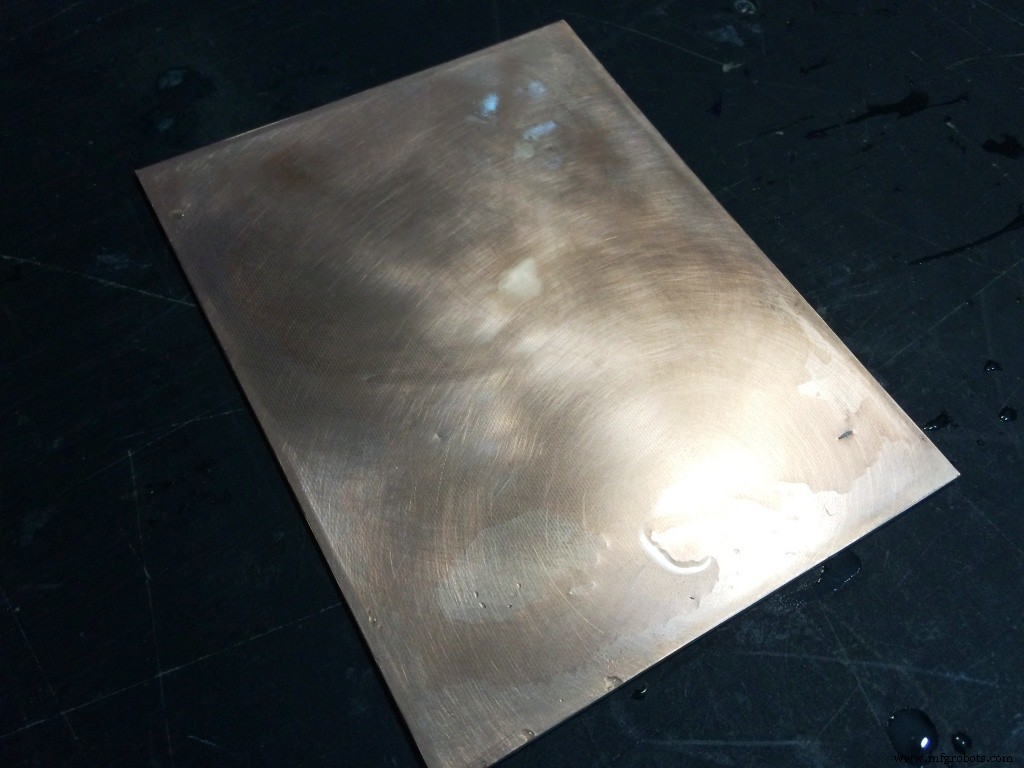
Começamos a construção ...
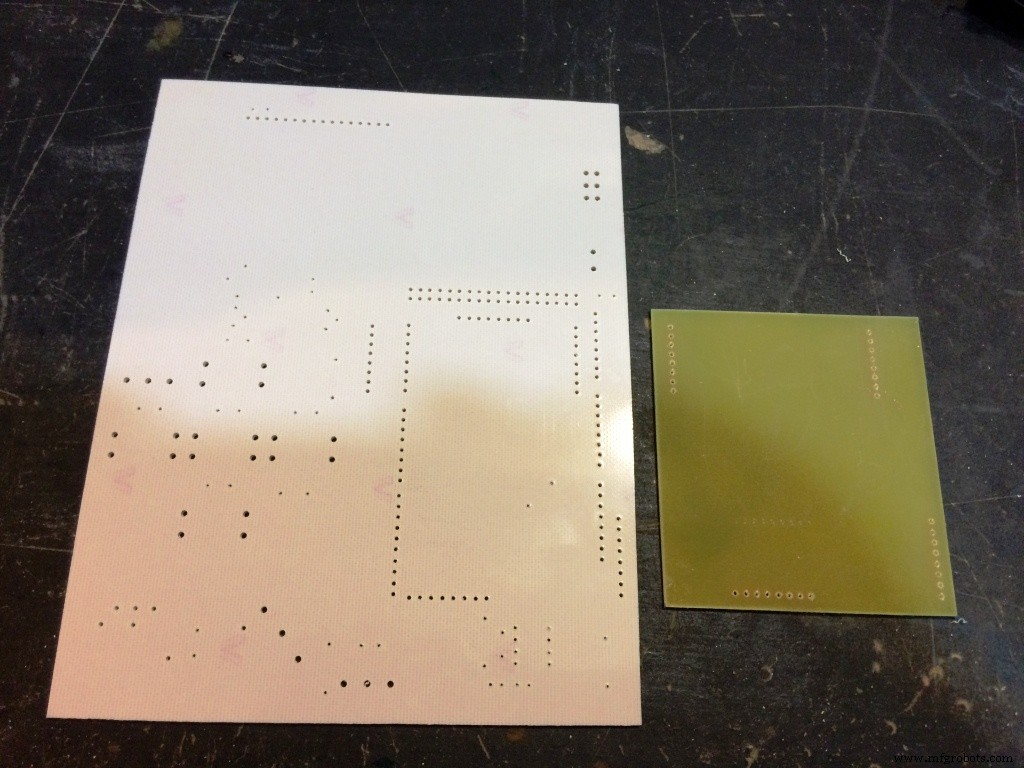
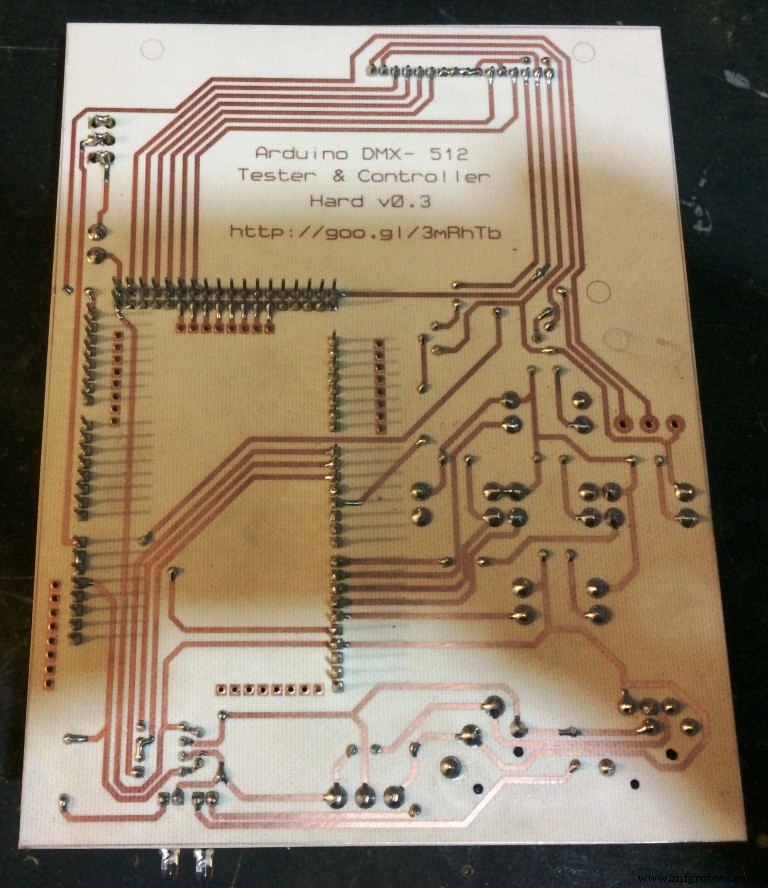
Usamos uma placa fenólica face time, reforçamos a lixa de cobre água, mais fina circularmente
Com Proteus envie arquivos para imprimir um negativo de acetato pré-impressão (há um PDF com o arquivo)
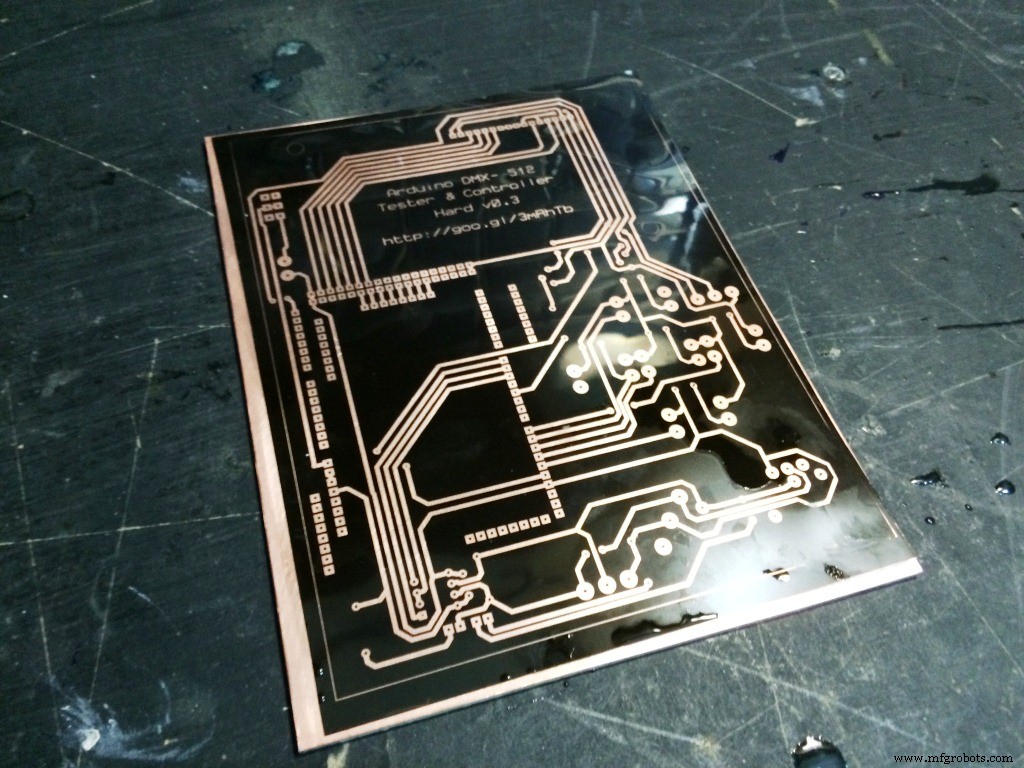
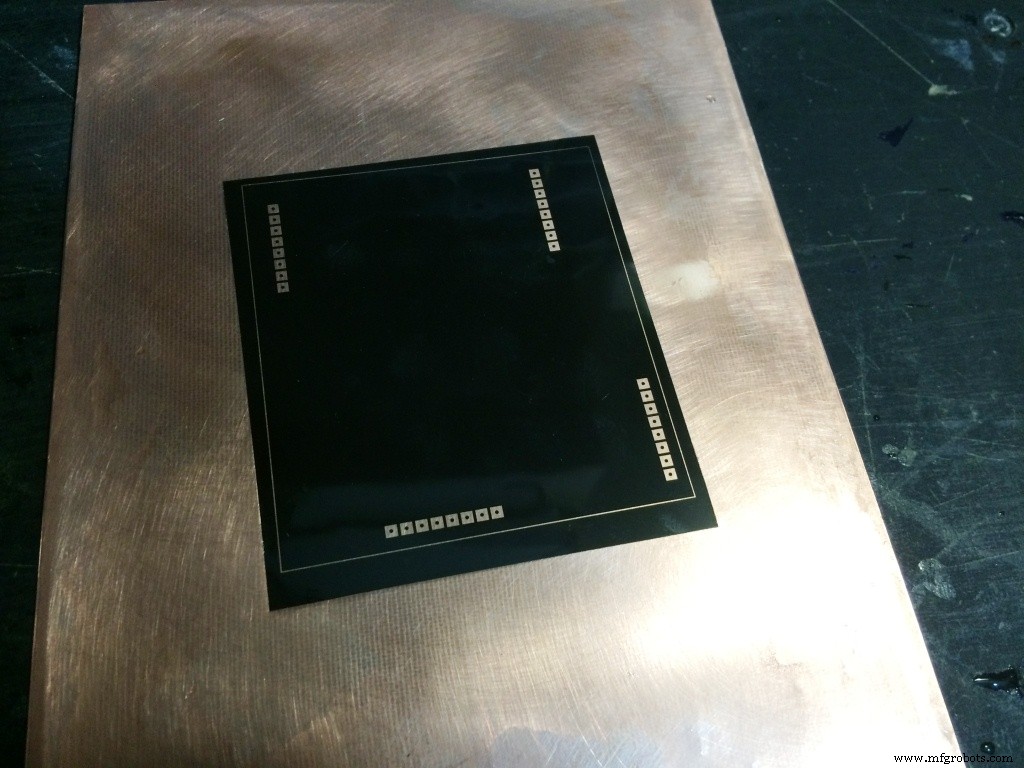
Usar e método filme fotossensível

Usamos um filme laminador de papel para aderir perfeitamente ao pcb

Adicione um pouco de água entre a placa e o acetato para que não se mova e aplique luz ultravioleta
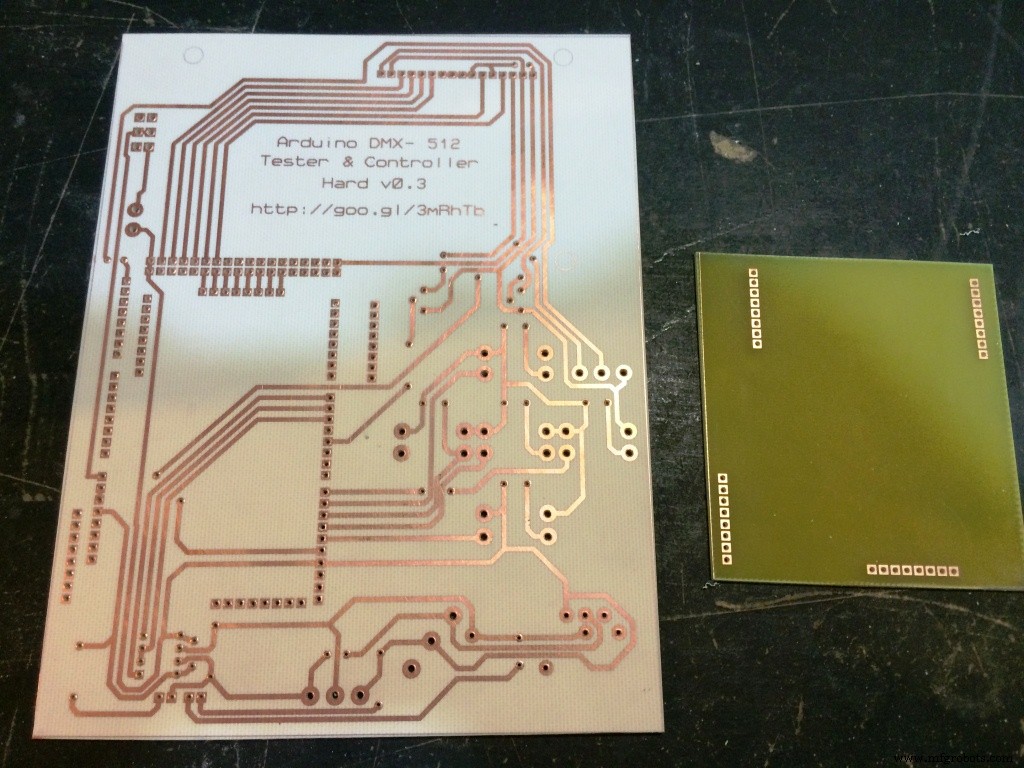
Aplicar o cloreto férrico estão limpos e prontos
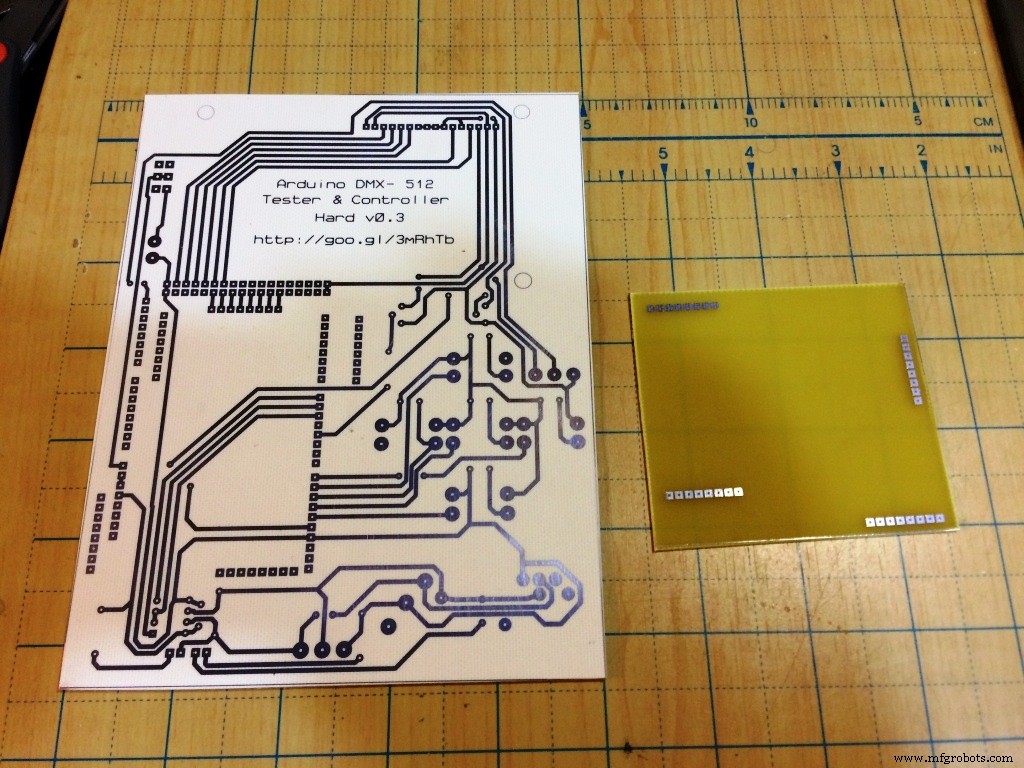
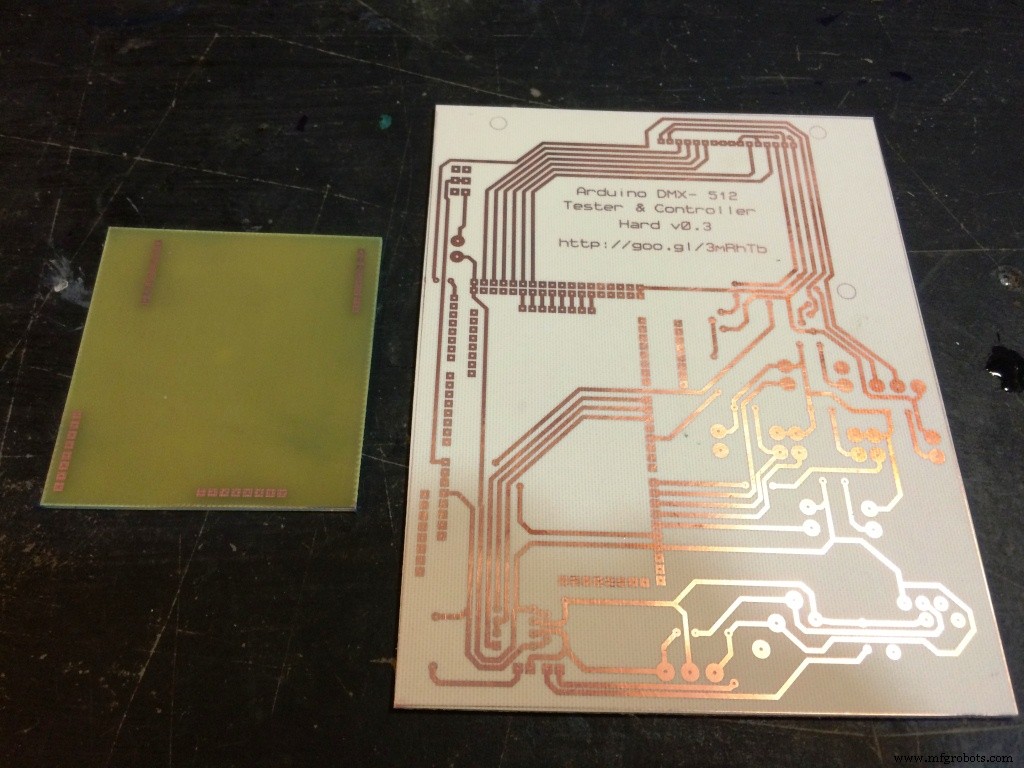
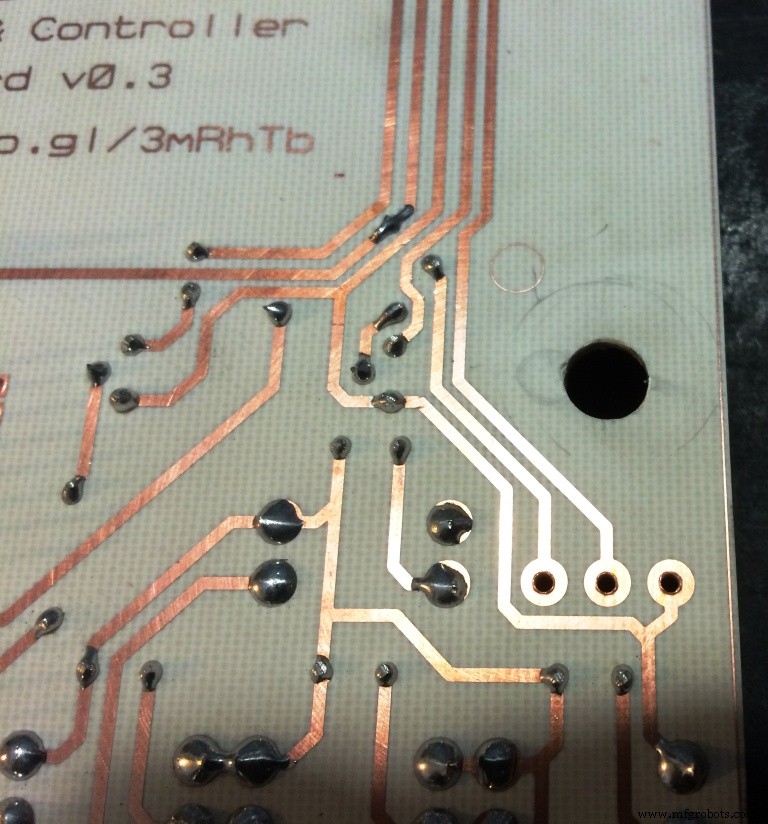
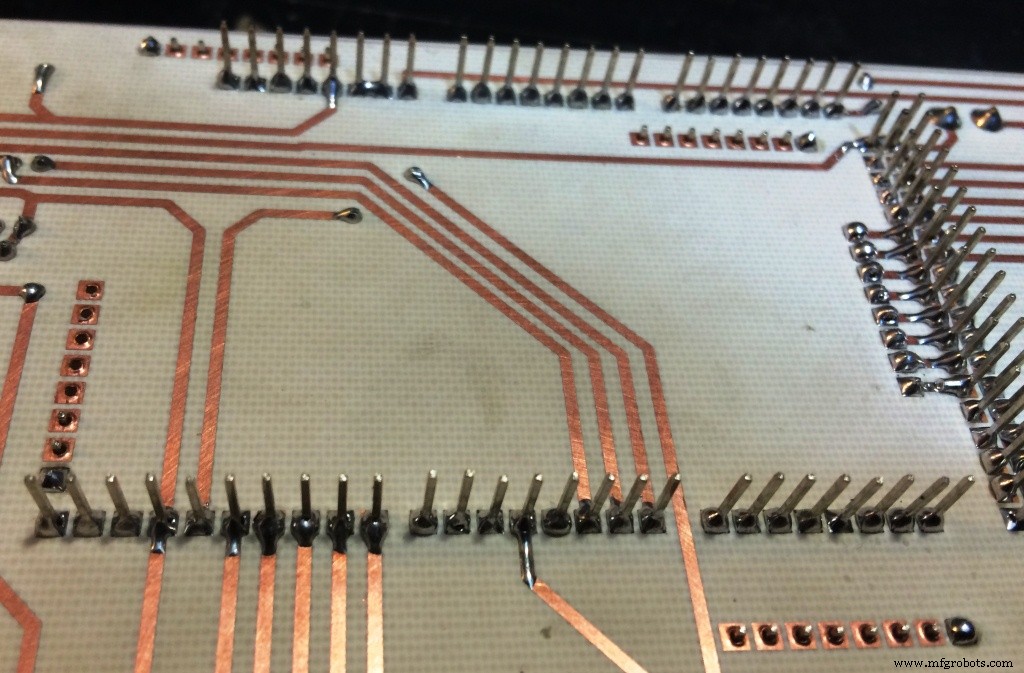
Nós perfuramos placas
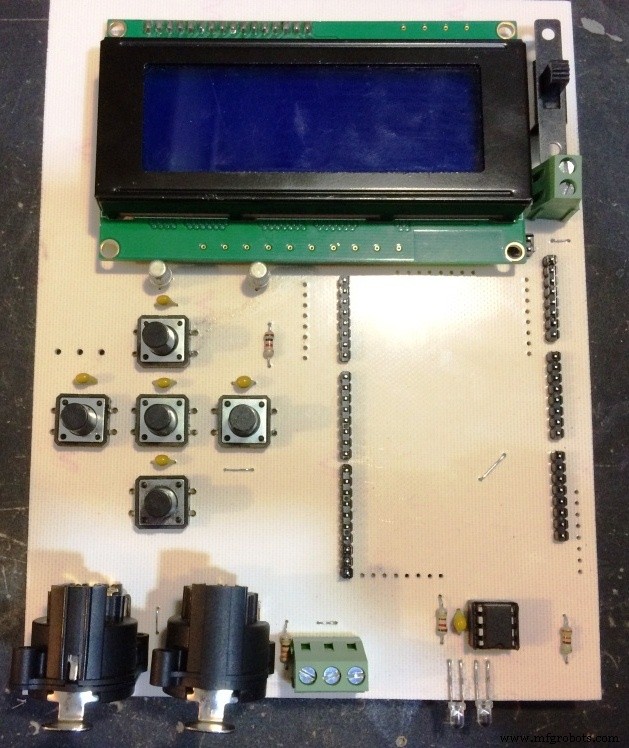
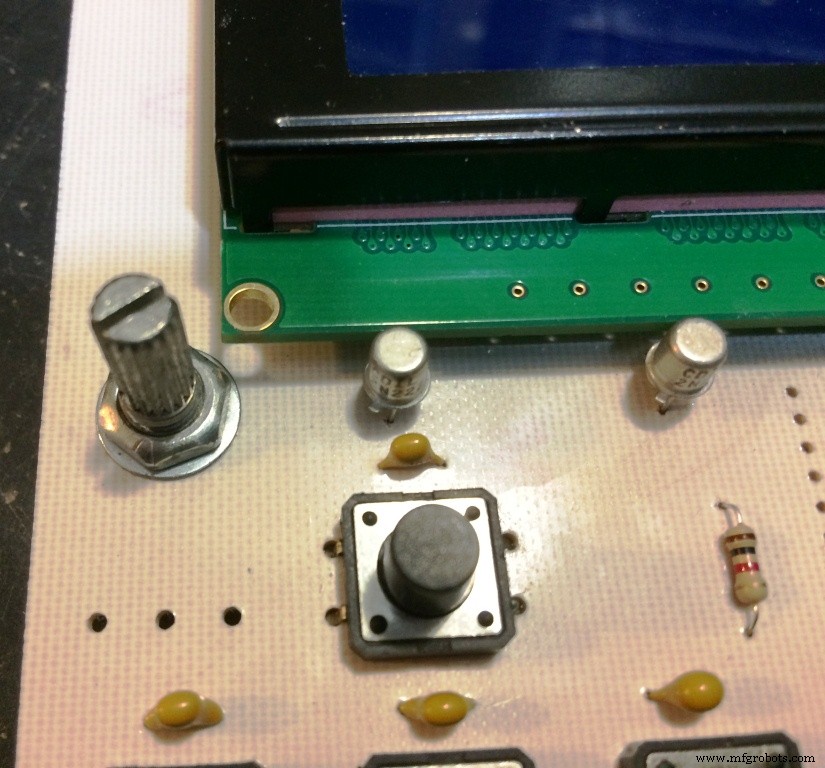
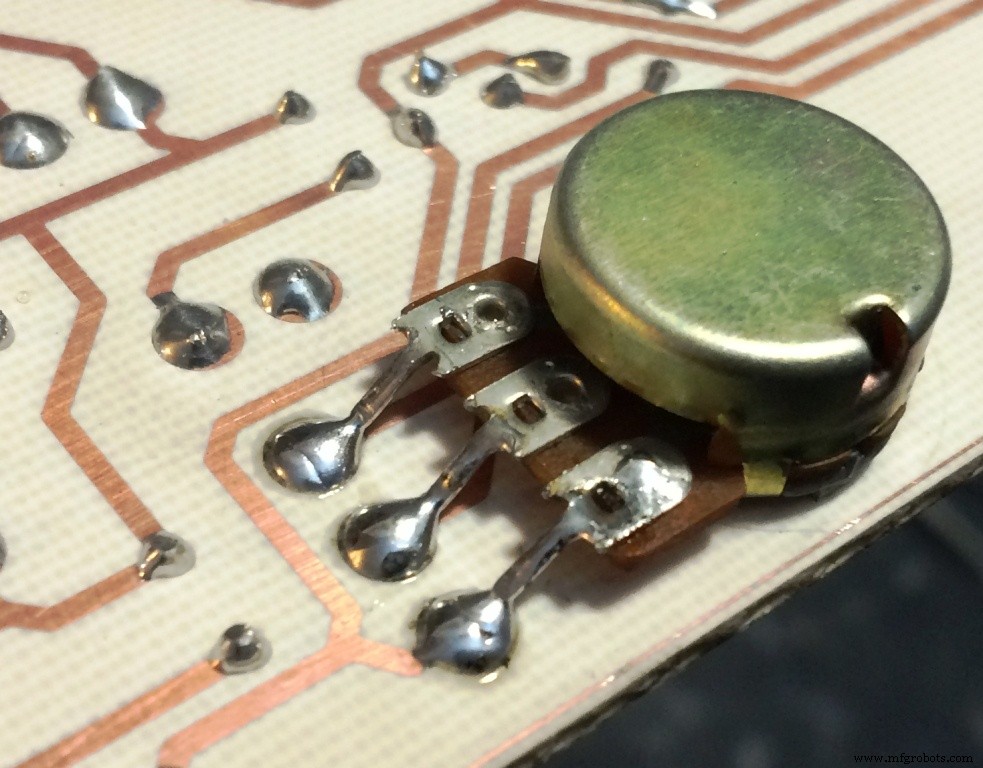
Componentes soldados

Removido para o guia do potenciômetro

Placa perfurada fenólica para colocar o potenciômetro
Viramos o botão e o pino soldado às almofadas

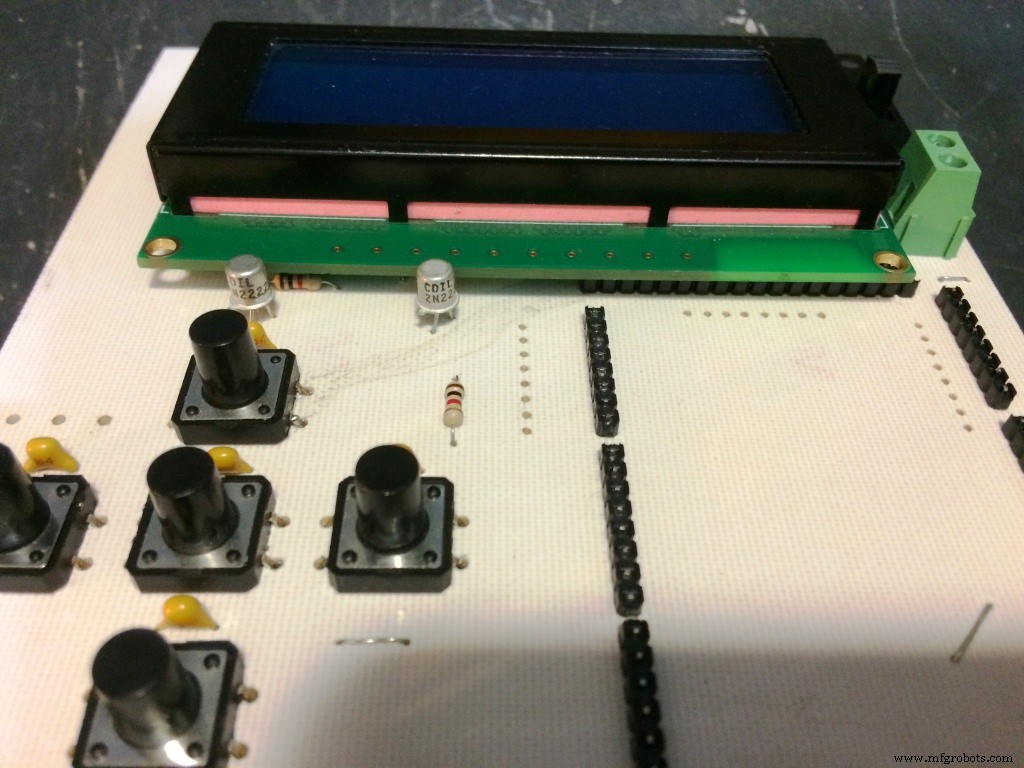
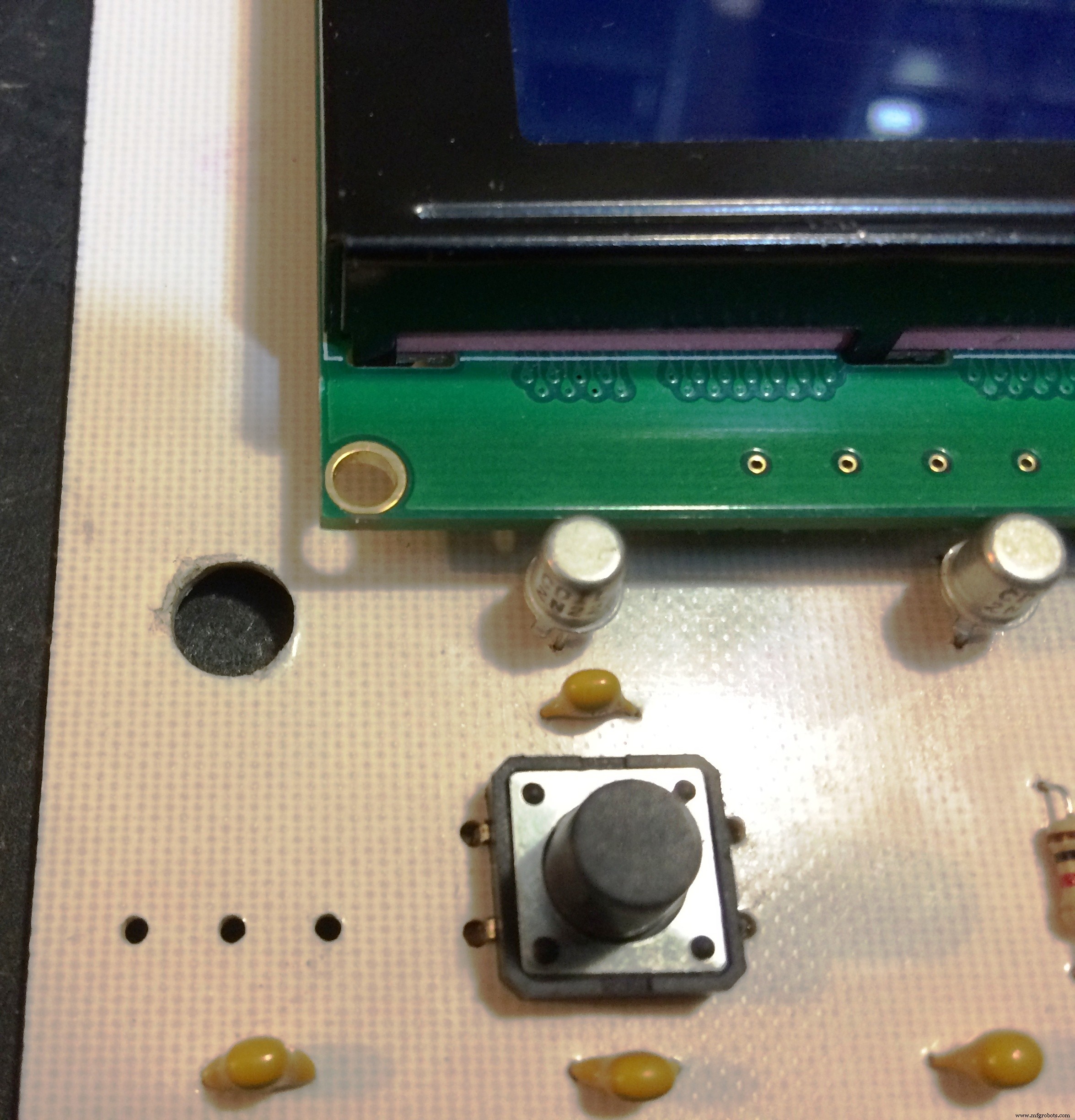
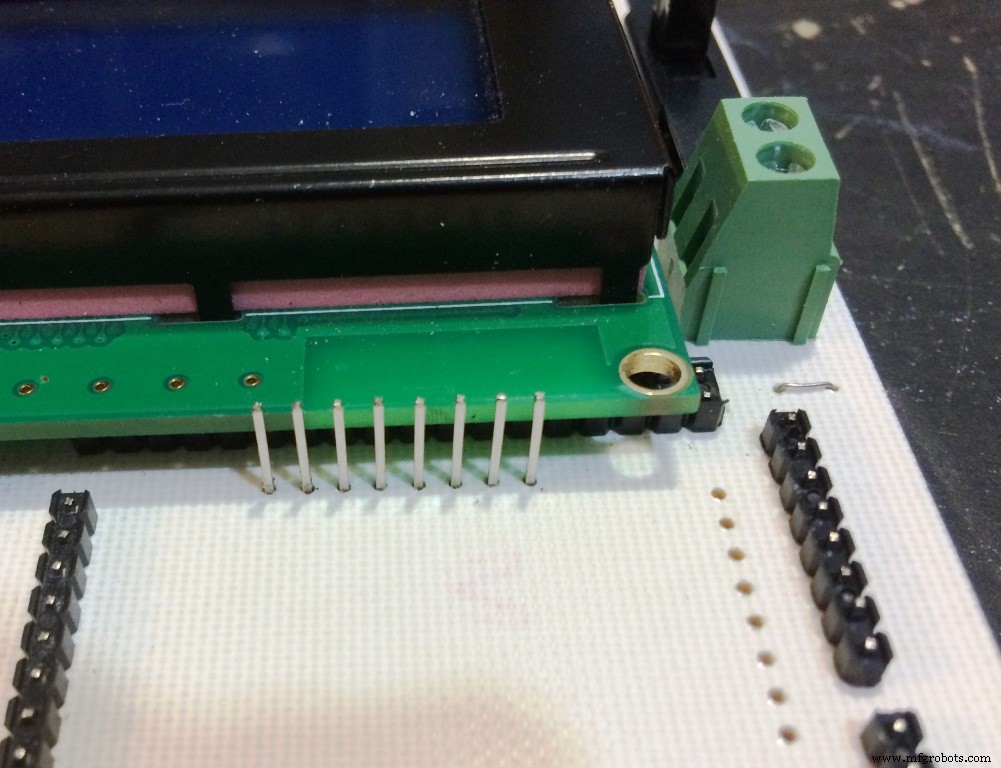
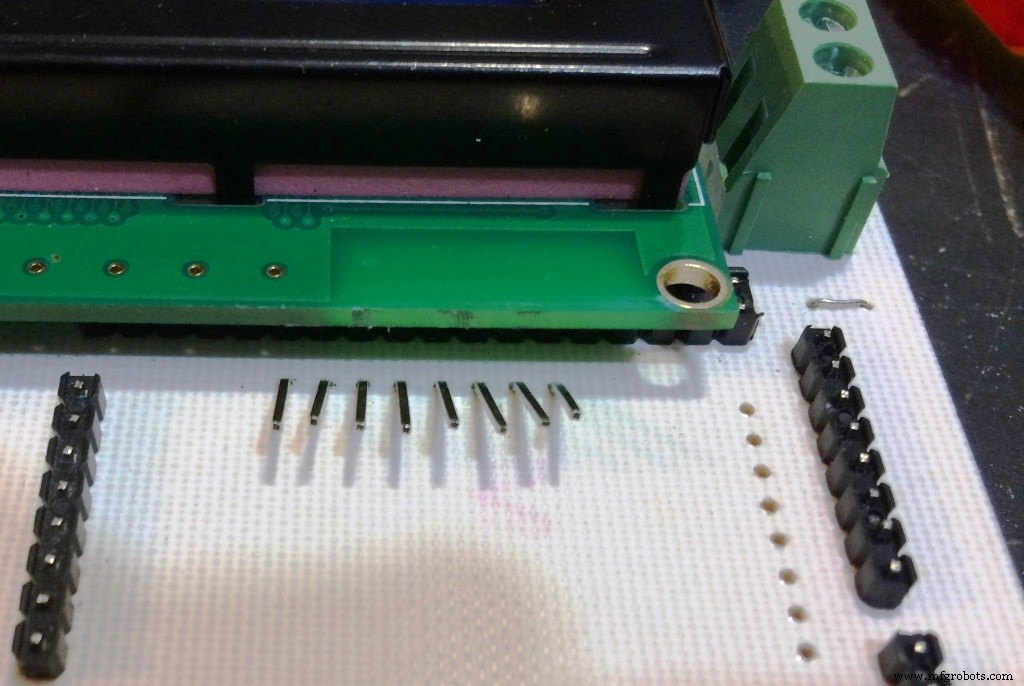
No caso do girl plate, colocando os cabeçotes solda no topo, acima dos pinos cortados com lixa e água retirou o excesso
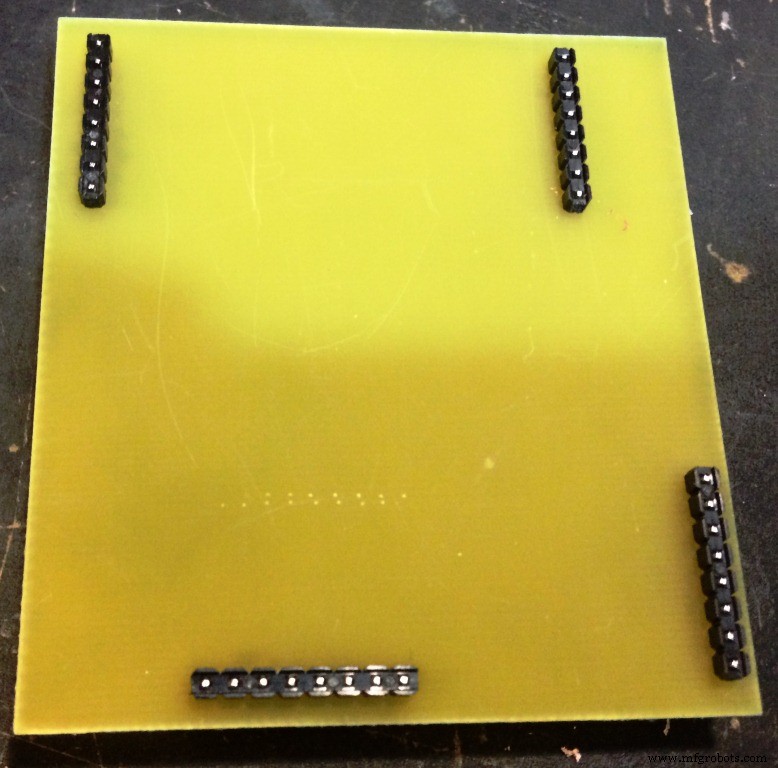

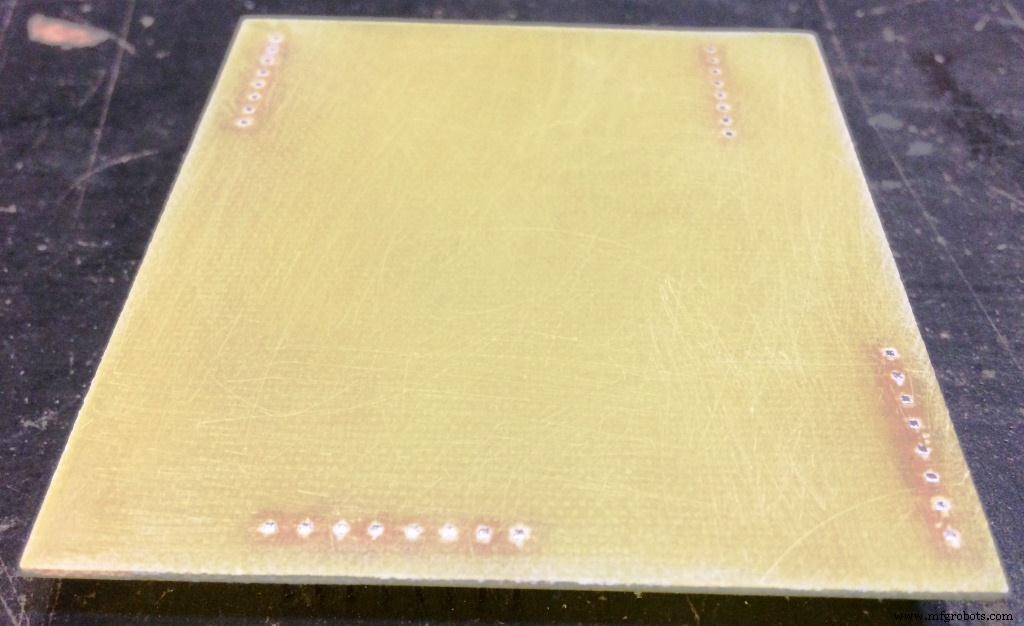
Nós adicionamos fita adesiva dupla para prender o teclado à placa
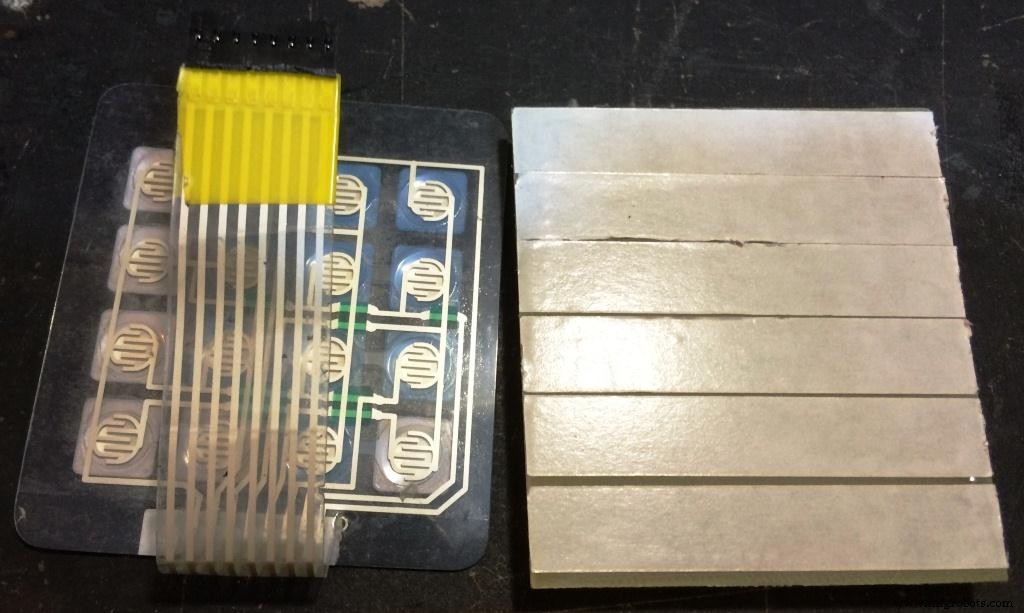
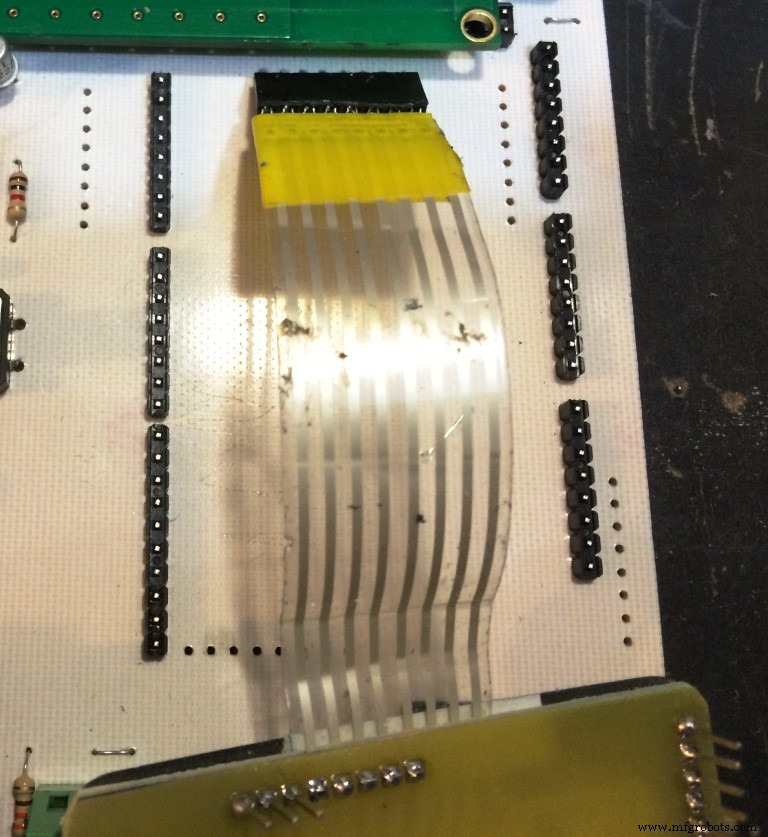
Aqui encontramos um detalhe, cabeçalhos entupidos com o flex do teclado, o corte (consideramos para a próxima versão)
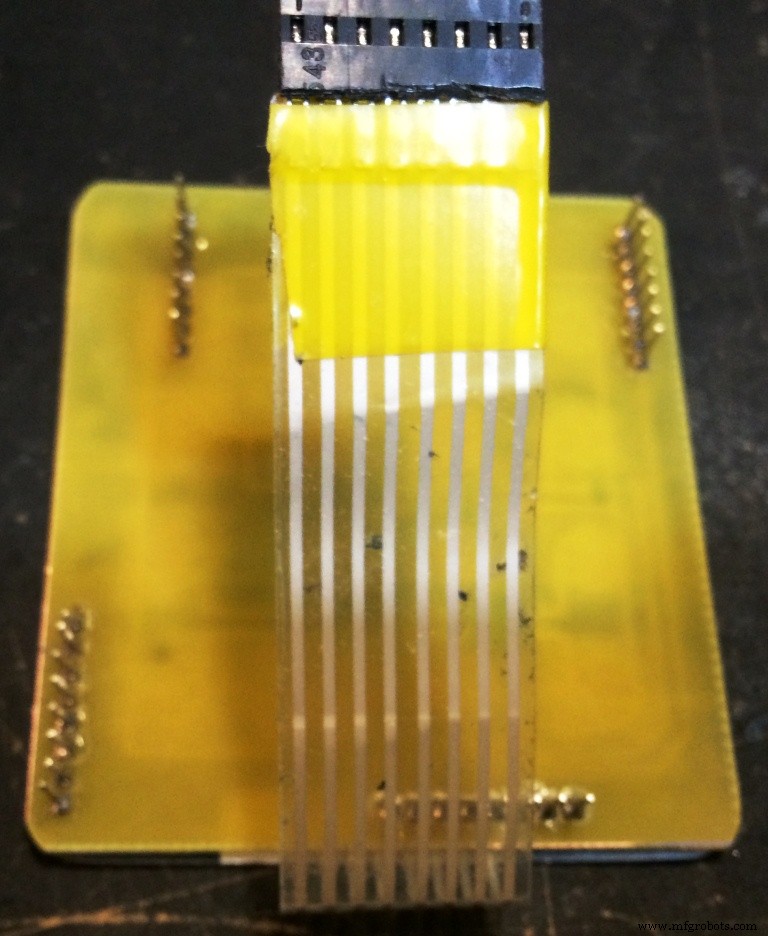

Solde os cabeçalhos que estão sob o teclado e dobre para trás para conectar o teclado lateralmente
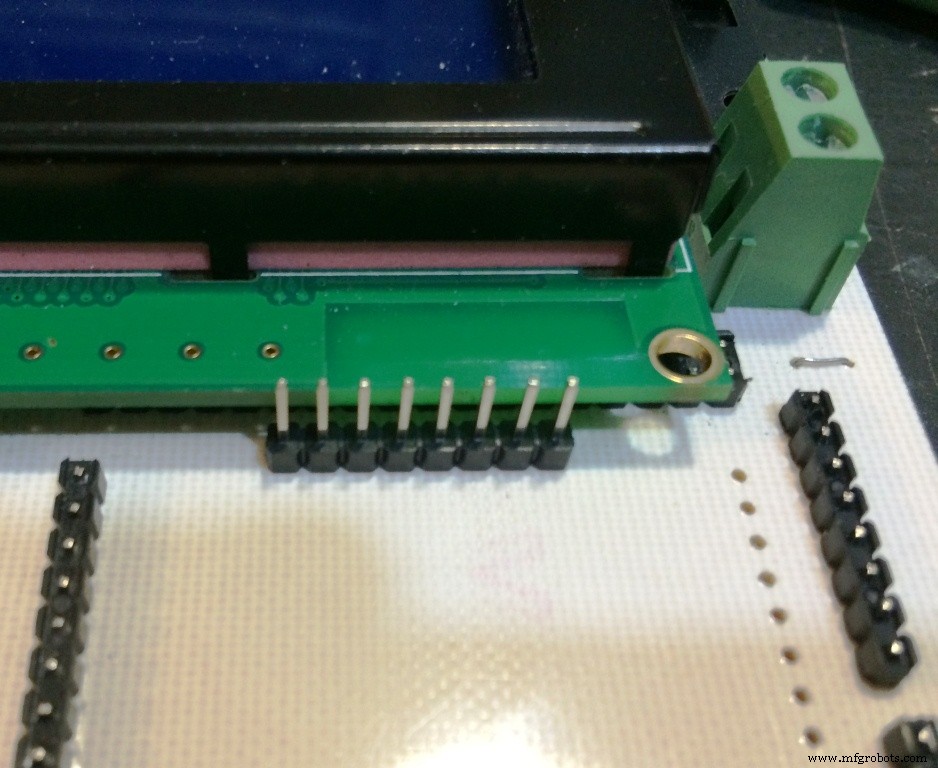
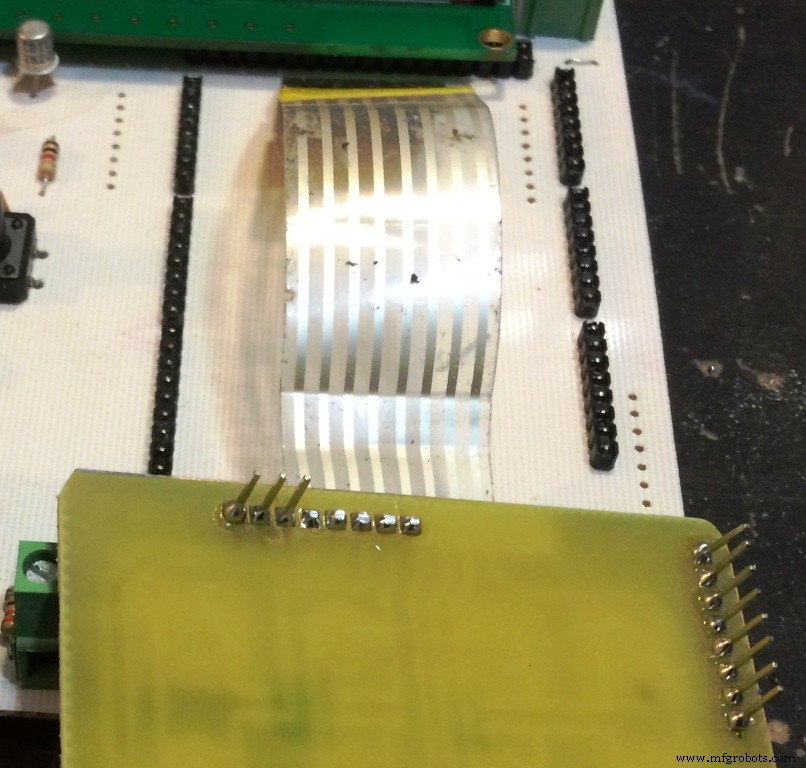
Colocamos no lugar o teclado na placa LCD, aqui está um detalhe, a base do MAX485 estou muito ligada ao teclado, forçamos um pouco (consideramos na próxima versão)
Adicionamos ao Arduino Mega alguma fita na porta USB para evitar um curto-circuito entre as trilhas

Todos os componentes montados





Carregamos o firmware no Arduino

Firmware v1.2
Notas de versão ...
- Suporta Hardware v0.3 - v0.4
- Navegação a partir do cursor facilmente acessível e intuitiva
- Inserção rápida de valores a partir do teclado
- Insira os valores do potenciômetro analógico
- Os bancos de memória armazenam 8 universos DMX
- Leitura da EEPROM para iniciar o universo DMX pré-selecionado
- Seleção de opções de memória para começar
- DMX Control Unitary, seleciona um canal específico, e mostra os valores dos canais anteriores e seguintes
- Matrix Control DMX mostra uma matriz 3 x 5 com os valores dos canais mostrados
- O Chaser DMX Control permite canais selecionados em sequência, com um tempo selecionado
- DMX Sequencer permite o sequenciamento entre universos armazenados na memória EEPROM com um tempo selecionado
- Multiply DMX Control permite multiplicar valores preencher os canais selecionados
- Função para localizar luminária do canal selecionado
- Acesso rápido às opções de memória
- Opções de memória Salvar, carregar, limpar, limpar tudo (para bancos e memória RAM vazia
- Opções de memória para os 8 bancos de universos DMX
- Bloqueio de função
- Controle da iluminação de fundo do LCD
- Controle de contraste do LCD
- Atalhos de teclado na luz de fundo do LCD
- compilado por Arduino IDE v1.0.6
- Biblioteca Arduino de quatro universos DMX v0.3 - Deskontrol.net
- Biblioteca LCD v1.2.1 - Francisco Malpartida
Código
// ****************************************** *************************************************** ******************************** // ***************** *************************************************** *************************************************** ****** // ** ** // ** Arduino DMX-512 Tester Controller ** // ** ** // ** - Firmware v0.6 ** // ** - Hardware v0.0 - v0.2 ** // ** ** // ** - Compilado en Arduino IDE v1.0.6 ** // ** http://www.arduino.cc/en/Main/OldSoftwareReleases ** // * * - Compilado para Arduino Mega 2560 R3 ** // ** http://www.arduino.cc/en/Main/ArduinoBoardMega2560 ** // ** - Libreria Arduino cuatro universos DMX v0.3 - Deskontrol.net ** // ** http://www.deskontrol.net/blog/libreria-arduino-cuatro-universos-dmx/) ** // ** - Libreria LCD v1.2.1 - Francisco Malpartida ** // ** https://bitbucket.org/fmalpartida/new-liquidcrystal/wiki/Home ** // ** - Simulacion en Proteus v7.7 SP2 ** // ** - Simulacion en Proteus de Arduino - Microcontrolandos ** // ** http ://microcontrolandos.blog spot.mx/2012/12/arduino-componentes-para-o-proteus.html ** // ** ** // ** Autor:** // ** ** // ** Daniel Roberto Becerril Angeles * * // ** daniel3514@gmail.com ** ** // ** https://github.com/daniel3514/Arduino-DMX-512-Tester-Controller/ ** // ** ** // ** Licenciamiento:** // ** ** // ** GNU General Pubic License Versão 3 ** // ** https://www.gnu.org/copyleft/gpl.html ** // ** ** / / ************************************************** *************************************************** ************************ // *********************** *************************************************** *************************************************nulo // Librerias #include // libreria para LCD #include #include #include #include // libreria DMX 4 universos deskontrol quatro universos biblioteca DMX - http://www.deskontrol.net/blog // Biblioteca DMX #define DMX512 (0 ) // (250 kbaud - 2 a 512 canais) Padrão USITT DMX-512 // # define DMX1024 (1) // (500 kbaud - 2 a 1024 canais) Completamente fora do padrão - TESTADO ok // # de fino DMX2048 (2) // (1000 kbaud - 2 a 2048 canais) chamado pelos fabricantes DMX1000K, DMX 4x ou DMX 1M ??? null // Puertos, variables // DMX // int DMX_Data_Flux =2; // controle de flujo de dados para dmx, 0 por default int DMX_Values [515]; // array de valores atuais DMX int Canal_Actual =1; // Cursor do botones int Boton_Up =51; int Boton_Down =45; int Boton_Left =53; int Boton_Right =49; int Boton_Center =47; byte LCD_Col_Pos =0; // posicionar o tempo real do lcd byte LCD_Row_Pos =0; // posicionar o tempo real de lcd byte Cursor_Conf [4] [20] ={{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0 , 0,0,0,0}, // config de posiciones de lcd Col Row {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0, 0,0,0,0,0}, {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0, 0}, {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0}}; // Array Numérico do Botones int Boton_Array_1 =36; int Boton_Array_2 =34; int Boton_Array_3 =32; int Boton_Array_4 =30; int Boton_Array_A =44; int Boton_Array_B =42; int Boton_Array_C =40; int Boton_Array_D =38; byte Boton_Calc =17; // valor limite # E * F, 17 sin valor limite byte Num_Col_Pos =0; // posicionar no tempo real do lcd byte Num_Row_Pos =0; // posicionar o tempo real de lcd int Num_Val =0; // valor gerado no calculo long Boton_Delay_Teclado =100; // atraso de lectura de boton // Potenciometro int Pot =A15; // entrada de potenciômetro // LCD int LCD_RS =8; // portas de conexão de LCD int LCD_E =9; int LCD_D4 =10; int LCD_D5 =11; int LCD_D6 =12; int LCD_D7 =13; LiquidCrystal lcd (LCD_RS, LCD_E, LCD_D4, LCD_D5, LCD_D6, LCD_D7); // Configuração do LCD int Back_Light_PWM =3; // Salida para PWM de Back Light de LCD int Contrast_PWM =4; // salida para pwm de contraste de LCD byte Back_Light_On_Off =0; // sabre se esta encendida o apagadanullvoid setup () {// DMX // pinMode (DMX_Data_Flux, OUTPUT); // Cursor do botones pinMode (Boton_Up, INPUT_PULLUP); pinMode (Boton_Down, INPUT_PULLUP); pinMode (Boton_Left, INPUT_PULLUP); pinMode (Boton_Right, INPUT_PULLUP); pinMode (Boton_Center, INPUT_PULLUP); // Botones numérico pinMode (Boton_Array_1, OUTPUT); pinMode (Boton_Array_2, OUTPUT); pinMode (Boton_Array_3, OUTPUT); pinMode (Boton_Array_4, OUTPUT); pinMode (Boton_Array_A, INPUT_PULLUP); pinMode (Boton_Array_B, INPUT_PULLUP); pinMode (Boton_Array_C, INPUT_PULLUP); pinMode (Boton_Array_D, INPUT_PULLUP); digitalWrite (Boton_Array_1, HIGH); digitalWrite (Boton_Array_2, HIGH); digitalWrite (Boton_Array_3, HIGH); digitalWrite (Boton_Array_4, HIGH); // LCD pinMode (LCD_RS, OUTPUT); pinMode (LCD_E, OUTPUT); pinMode (LCD_D7, OUTPUT); pinMode (LCD_D6, OUTPUT); pinMode (LCD_D5, OUTPUT); pinMode (LCD_D4, OUTPUT); pinMode (Back_Light_PWM, OUTPUT); lcd.begin (20, 4); // tamaño de LCD // DMX ArduinoDmx0.set_tx_address (1); // acesse aqui a direção de início de DMX ArduinoDmx0.set_tx_channels (512); // acesse aqui o número de canais a transmitir ArduinoDmx0.init_tx (DMX512); // iniciar transmision universo 0, modo estandar DMX512 // sem conexão pinMode (5, OUTPUT); digitalWrite (5, BAIXO); pinMode (6, SAÍDA); digitalWrite (6, BAIXO); pinMode (7, SAÍDA); digitalWrite (7, BAIXO); pinMode (22, SAÍDA); digitalWrite (22, BAIXO); pinMode (23, SAÍDA); digitalWrite (23, BAIXO); pinMode (24, SAÍDA); digitalWrite (24, BAIXO); pinMode (25, SAÍDA); digitalWrite (25, BAIXO); pinMode (26, SAÍDA); digitalWrite (26, BAIXO); pinMode (27, SAÍDA); digitalWrite (27, BAIXO); pinMode (28, SAÍDA); digitalWrite (28, BAIXO); pinMode (29, SAÍDA); digitalWrite (29, BAIXO); pinMode (31, SAÍDA); digitalWrite (31, BAIXO); pinMode (33, SAÍDA); digitalWrite (33, BAIXO); pinMode (35, SAÍDA); digitalWrite (35, BAIXO); pinMode (37, SAÍDA); digitalWrite (37, BAIXO); pinMode (39, SAÍDA); digitalWrite (39, BAIXO); pinMode (41, SAÍDA); digitalWrite (41, BAIXO); pinMode (43, SAÍDA); digitalWrite (43, BAIXO); pinMode (46, SAÍDA); digitalWrite (46, BAIXO); pinMode (48, SAÍDA); digitalWrite (48, BAIXO); pinMode (50, SAÍDA); digitalWrite (50, BAIXO); pinMode (52, SAÍDA); digitalWrite (52, BAIXO); pinMode (A0, OUTPUT); digitalWrite (A0, LOW); pinMode (A1, OUTPUT); digitalWrite (A1, LOW); pinMode (A2, SAÍDA); digitalWrite (A2, BAIXO); pinMode (A3, SAÍDA); digitalWrite (A3, BAIXO); pinMode (A4, SAÍDA); digitalWrite (A4, BAIXO); pinMode (A5, OUTPUT); digitalWrite (A5, LOW); pinMode (A6, OUTPUT); digitalWrite (A6, LOW); pinMode (A7, OUTPUT); digitalWrite (A7, LOW); pinMode (A8, OUTPUT); digitalWrite (A8, LOW); pinMode (A9, OUTPUT); digitalWrite (A9, LOW); pinMode (A10, OUTPUT); digitalWrite (A10, LOW); pinMode (A11, OUTPUT); digitalWrite (A11, LOW); pinMode (A12, OUTPUT); digitalWrite (A12, LOW); pinMode (A13, SAÍDA); digitalWrite (A13, LOW); pinMode (A14, OUTPUT); digitalWrite (A14, LOW); } loop nullvoid () {digitalWrite (2, HIGH); // máximo 485 como salida Back_Light_Init (); Contrast_Init (); GUI_About (); GUI_Memory_Init (); } nullvoid Back_Light_Init () {// último estado da luz de fundo byte Back_Light_Value =EEPROM.read (513); analogWrite (Back_Light_PWM, Back_Light_Value); if (Back_Light_Value ==0) {Back_Light_On_Off =0; } if (Back_Light_Value> 0) {Back_Light_On_Off =1; }} void Contrast_Init () {// último estado do comtrast byte Contrast_Value =EEPROM.read (514); analogWrite (Contrast_PWM, Contrast_Value); } void Back_Light_En () {byte Back_Light_Value =EEPROM.read (513); // lectura del ultimo valor from la eeprom, 513 es donde se guarda el valor // encender if (Back_Light_On_Off ==0) // si esta apagada encenderla {if (Back_Light_Value ==0) // la encendemos de todos modos {analogWrite (Back_Light_PWM, 127); // aqui o valor a encender no caso que se tiver estabelecido apagado a luz de fundo} if (Back_Light_Value> 0) {analogWrite (Back_Light_PWM, Back_Light_Value); // encender con el valor de la eeprom} Back_Light_On_Off =1; goto salida; } // apagar if (Back_Light_On_Off ==1) // si esta encendida apagarla {analogWrite (Back_Light_PWM, 0); Back_Light_On_Off =0; } salida:{atraso (300); // para impedir a repetição do comando}} void GUI_About () {byte Firm_Ver_Ent =0; byte Firm_Ver_Dec =6; byte Hard_Ver_Ent =0; byte Hard_Ver_Dec =0; byte ID =20; lcd.clear (); lcd.noBlink (); // ocultar o cursor lcd.setCursor (0, 0); para (int numero =0; numero <=512; numero ++) // efeito binario en lcd {lcd.print (numero, BIN); } lcd.clear (); lcd.setCursor (0, 3); lcd.print ("http://goo.gl/kdYlj7"); lcd.setCursor (3, 0); lcd.print ("Arduino DMX-512"); lcd.setCursor (1, 1); lcd.print ("Testador e controlador"); // Firmware lcd.setCursor (0, 2); lcd.print ("Firm v"); lcd.print (Firm_Ver_Ent); lcd.print ("."); lcd.print (Firm_Ver_Dec); // Hardware lcd.setCursor (11, 2); lcd.print ("Hard v"); lcd.print (Hard_Ver_Ent); lcd.print ("."); lcd.print (Hard_Ver_Dec); atraso (2000); // retardo de muestra de mensaje} nullvoid Multi_Matrix (int inicial) {// dibujar banco Numerico_Write (inicial, 13, 0); Numerico_Write (inicial + 14, 17, 0); // matriz 1 Numerico_Write (DMX_Values [inicial], 1, 1); Numerico_Write (DMX_Values [inicial + 1], 5, 1); Numerico_Write (DMX_Values [inicial + 2], 9, 1); Numerico_Write (DMX_Values [inicial + 3], 13, 1); Numerico_Write (DMX_Values [inicial + 4], 17, 1); // matriz 2 Numerico_Write (DMX_Values [inicial + 5], 1, 2); Numerico_Write (DMX_Values [inicial + 6], 5, 2); Numerico_Write (DMX_Values [inicial + 7], 9, 2); Numerico_Write (DMX_Values [inicial + 8], 13, 2); Numerico_Write (DMX_Values [inicial + 9], 17, 2); // matriz 3 Numerico_Write (DMX_Values [inicial + 10], 1, 3); Numerico_Write (DMX_Values [inicial + 11], 5, 3); Numerico_Write (DMX_Values [inicial + 12], 9, 3); Numerico_Write (DMX_Values [inicial + 13], 13, 3); Numerico_Write (DMX_Values [inicial + 14], 17, 3); } void GUI_Control_Matrix () {int Inicial =1; Canal_Actual =1; inicio:lcd.clear (); lcd.setCursor (0, 0); lcd.print ("c --- Mem Ctr -"); Multi_Matrix (Inicial); // Cursor LCD_Col_Pos =12; // posicion de cursor LCD_Row_Pos =0; // posicion e cursor // configuracion de cursor Cursor_Conf_Clear (); // array limpiar // Linha 0 Cursor_Conf [0] [4] =1; // Memory Cursor_Conf [0] [8] =1; // Unit Cursor_Conf [0] [12] =1; // Banco Inicial Cursor_Conf [0] [16] =1; // Banco Final // Linha 1 Cursor_Conf [1] [0] =1; Cursor_Conf [1] [4] =1; Cursor_Conf [1] [8] =1; Cursor_Conf [1] [12] =1; Cursor_Conf [1] [16] =1; // Linha 2 Cursor_Conf [2] [0] =1; Cursor_Conf [2] [4] =1; Cursor_Conf [2] [8] =1; Cursor_Conf [2] [12] =1; Cursor_Conf [2] [16] =1; // Linha 3 Cursor_Conf [3] [0] =1; Cursor_Conf [3] [4] =1; Cursor_Conf [3] [8] =1; Cursor_Conf [3] [12] =1; Cursor_Conf [3] [16] =1; // navegar Banco:GUI_Navegar (1, Inicial); // Acciones // Memória if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==0) {GUI_Memory (); goto inicio; } // Controlar if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==0) {GUI_Control_Options (); goto inicio; } // Banco Inicial if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==0) {Num_Row_Pos =0; Num_Col_Pos =13; Num_Val =Inicial; // para dejar o número que estaba se não mudar Numerico_Calc (0); if (Num_Val> 498) // limite de matriz {Num_Val =498; } if (Num_Val ==0) // limite de matriz {Num_Val =1; } Inicial =Num_Val; goto inicio; } // Banco Final if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==0) {Num_Row_Pos =0; Num_Col_Pos =17; if (Inicial ==1) Num_Val =15; senão Num_Val =Inicial - 14; // para dejar o número que estaba se não mudar Numerico_Calc (0); if (Num_Val> 512) // limite de matriz {Inicial =498; goto inicio; } if (Num_Val <15) // limite de matriz {Inicial =1; goto inicio; } Inicial =Num_Val - 14; goto inicio; } // posicion 1 if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==1) {Canal_Actual =Inicial; goto Salida_DMX; } // posicion 2 if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==1) {Canal_Actual =Inicial + 1; goto Salida_DMX; } // posicion 3 if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==1) {Canal_Actual =Inicial + 2; goto Salida_DMX; } // posicion 4 if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==1) {Canal_Actual =Inicial + 3; goto Salida_DMX; } // posicion 5 if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==1) {Canal_Actual =Inicial + 4; goto Salida_DMX; } // posicion 6 if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==2) {Canal_Actual =Inicial + 5; goto Salida_DMX; } // posicion 7 if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==2) {Canal_Actual =Inicial + 6; goto Salida_DMX; } // posicion 8 if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==2) {Canal_Actual =Inicial + 7; goto Salida_DMX; } // posicion 9 if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==2) {Canal_Actual =Inicial + 8; goto Salida_DMX; } // posicion 10 if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==2) {Canal_Actual =Inicial + 9; goto Salida_DMX; } // posicion 11 if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==3) {Canal_Actual =Inicial + 10; goto Salida_DMX; } // posicion 12 if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==3) {Canal_Actual =Inicial + 11; goto Salida_DMX; } // posicion 13 if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==3) {Canal_Actual =Inicial + 12; goto Salida_DMX; } // posicion 14 if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==3) {Canal_Actual =Inicial + 13; goto Salida_DMX; } // posicion 15 if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==3) {Canal_Actual =Inicial + 14; goto Salida_DMX; } Salida_DMX:Num_Row_Pos =LCD_Row_Pos; Num_Col_Pos =LCD_Col_Pos + 1; Num_Val =DMX_Values [Canal_Actual]; // para dejar el numero que estaba se não se mudar Numerico_Calc (1); if (Num_Val ==612) // ubicar {Ubicar (); Num_Col_Pos =Num_Col_Pos - 4; } if (Num_Val ==712) // analogo {Analog_Read_DMX (Num_Col_Pos - 2, Num_Row_Pos); Num_Col_Pos =Num_Col_Pos - 4; goto Banco; } if (Num_Val> 255) {Num_Val =255; Numerico_Write (255, Num_Col_Pos + 2, Num_Row_Pos); } ArduinoDmx0.TxBuffer [Canal_Actual - 1] =Num_Val; DMX_Values [Canal_Actual] =Num_Val; goto Banco; } void Cursor_Conf_Clear () {for (byte Conteo_Col =0; Conteo_Col <=19; Conteo_Col ++) {for (byte Conteo_Row =0; Conteo_Row <=3; Conteo_Row ++) {Cursor_Conf [Conteo_Row] [Conteo_Col] =0; }}} void GUI_Navegar (matriz de byte, banco interno) {long Boton_Delay_Cursor =300; // retarda a leitura do boton byte LCD_Col_Pos_Ant; // saber o estado anterior para borrar cursor byte LCD_Row_Pos_Ant; // saber o estado anterior para o cursor do borrar // guardar o valor anterior de linha col LCD_Col_Pos_Ant =LCD_Col_Pos; LCD_Row_Pos_Ant =LCD_Row_Pos; // Dibujar cursor lcd.setCursor (LCD_Col_Pos, LCD_Row_Pos); lcd.print (">"); // navegacion Dibujar:byte Dibujar_Cursor =0; // sabre si dibujar cursor para evitar repetições en lcd, 0 sem dibujar, 1 dibujar>, 2 dibujar + // LCD Back Light * digitalWrite (Boton_Array_1, LOW); // lectura linha 1 if (digitalRead (Boton_Array_D) ==LOW) {delay (Boton_Delay_Teclado); Back_Light_En (); } digitalWrite (Boton_Array_1, HIGH); // lectura linea 1 // Left if (digitalRead (Boton_Left) ==LOW) {delay (Boton_Delay_Cursor); byte Salida_Left =0; byte LCD_Col_Pos_Temp =0; LCD_Col_Pos_Temp =LCD_Col_Pos; while (Salida_Left ==0) {if (LCD_Col_Pos_Temp ==0) {LCD_Col_Pos_Temp =20; } LCD_Col_Pos_Temp =LCD_Col_Pos_Temp - 1; if (Cursor_Conf [LCD_Row_Pos] [LCD_Col_Pos_Temp] ==1) {LCD_Col_Pos =LCD_Col_Pos_Temp; Dibujar_Cursor =1; Salida_Left =1; } } goto Salida; } // Right if (digitalRead(Boton_Right) ==LOW) { delay(Boton_Delay_Cursor); byte Salida_Right =0; byte LCD_Col_Pos_Temp =0; LCD_Col_Pos_Temp =LCD_Col_Pos; while (Salida_Right ==0) { LCD_Col_Pos_Temp =LCD_Col_Pos_Temp + 1; if (LCD_Col_Pos_Temp>
=20) { LCD_Col_Pos_Temp =0; // regresar al cero } if (Cursor_Conf[LCD_Row_Pos][LCD_Col_Pos_Temp] ==1) { LCD_Col_Pos =LCD_Col_Pos_Temp; Dibujar_Cursor =1; Salida_Right =1; } } goto Salida; } // Down if (digitalRead(Boton_Down) ==LOW) { delay(Boton_Delay_Cursor); byte Salida_Down =0; byte LCD_Row_Pos_Temp =0; LCD_Row_Pos_Temp =LCD_Row_Pos; while (Salida_Down ==0) { LCD_Row_Pos_Temp =LCD_Row_Pos_Temp + 1; if (LCD_Row_Pos_Temp>
=4) { LCD_Row_Pos_Temp =0; // regresar al cero } if (Cursor_Conf[LCD_Row_Pos_Temp][LCD_Col_Pos] ==1) { LCD_Row_Pos =LCD_Row_Pos_Temp; Dibujar_Cursor =1; Salida_Down =1; } } goto Salida; } // Up if (digitalRead(Boton_Up) ==LOW) { delay(Boton_Delay_Cursor); byte Salida_Up =0; byte LCD_Row_Pos_Temp; LCD_Row_Pos_Temp =LCD_Row_Pos; while (Salida_Up ==0) { if (LCD_Row_Pos_Temp <=0) { LCD_Row_Pos_Temp =4; } LCD_Row_Pos_Temp =LCD_Row_Pos_Temp - 1; if (Cursor_Conf[LCD_Row_Pos_Temp][LCD_Col_Pos] ==1) { Dibujar_Cursor =1; LCD_Row_Pos =LCD_Row_Pos_Temp; Salida_Up =1; } } goto Salida; } // Center if (digitalRead(Boton_Center) ==LOW) { delay(Boton_Delay_Cursor); byte Salida_Center =0; while (Salida_Center ==0) { if (Cursor_Conf[LCD_Row_Pos][LCD_Col_Pos] ==1) { Dibujar_Cursor =2; // dibujar + Salida_Center =1; } } } Salida:// Dibujar Cursor if (Dibujar_Cursor> 0) { if (Dibujar_Cursor ==1) { // borra el anterior lcd.setCursor (LCD_Col_Pos_Ant, LCD_Row_Pos_Ant); lcd.print(" "); // escribir> lcd.setCursor (LCD_Col_Pos, LCD_Row_Pos); lcd.print(">"); // matrix print posicion if (matrix ==1) { // banco inicial if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==0) { lcd.setCursor(1, 0); lcd.print("---"); goto salida; } // banco final if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==0) { lcd.setCursor(1, 0); lcd.print("---"); goto salir; } // Memory if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==0) { lcd.setCursor(1, 0); lcd.print("---"); goto salida; } // Unitary if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==0) { lcd.setCursor(1, 0); lcd.print("---"); goto salida; } // banco 1 if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==1) { Numerico_Write (banco, 1, 0); goto salida; } // banco 2 if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==1) { Numerico_Write (banco + 1, 1, 0); goto salida; } // banco 3 if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==1) { Numerico_Write (banco + 2, 1, 0); goto salida; } // banco 4 if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==1) { Numerico_Write (banco + 3, 1, 0); goto salida; } // banco 5 if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==1) { Numerico_Write (banco + 4, 1, 0); goto salida; } // banco 6 if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==2) { Numerico_Write (banco + 5, 1, 0); goto salida; } // banco 7 if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==2) { Numerico_Write (banco + 6, 1, 0); goto salida; } // banco 8 if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==2) { Numerico_Write (banco + 7, 1, 0); goto salida; } // banco 9 if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==2) { Numerico_Write (banco + 8, 1, 0); goto salida; } // banco 10 if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==2) { Numerico_Write (banco + 9, 1, 0); goto salida; } // banco 11 if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==3) { Numerico_Write (banco + 10, 1, 0); goto salida; } // banco 12 if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==3) { Numerico_Write (banco + 11, 1, 0); goto salida; } // banco 13 if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==3) { Numerico_Write (banco + 12, 1, 0); goto salida; } // banco 14 if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==3) { Numerico_Write (banco + 13, 1, 0); goto salida; } // banco 15 if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==3) { Numerico_Write (banco + 14, 1, 0); goto salida; } // escribir guion de bancos salida:lcd.setCursor(16, 0); lcd.print("-"); salir:{} } } else { // escribir + lcd.setCursor (LCD_Col_Pos, LCD_Row_Pos); lcd.print("+"); } //salida LCD_Col_Pos_Ant =LCD_Col_Pos; LCD_Row_Pos_Ant =LCD_Row_Pos; if (Dibujar_Cursor ==2) { goto Salir; } else { Dibujar_Cursor =0; } } goto Dibujar; Salir:{} }nullvoid GUI_Memory_Init() { lcd.clear (); // Texto lcd.setCursor (0, 0); lcd.print("Initial Memory:"); lcd.setCursor (2, 2); lcd.print("Empty"); lcd.setCursor (9, 2); lcd.print("Load"); lcd.setCursor (15, 2); lcd.print("Clear"); // Cursor LCD_Col_Pos =1; // posicion de cursor LCD_Row_Pos =2; // configuracion de cursor Cursor_Conf_Clear(); // limpiar array // Acciones Cursor_Conf[2][1] =1; // Empty Cursor_Conf[2][8] =1; // Load Cursor_Conf[2][14] =1; // Clear // navegar GUI_Navegar(0, 0); // Acciones // Load if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==2) { EEPROM_Load(); GUI_Control_Options(); } // Clear if (LCD_Col_Pos ==14 &&LCD_Row_Pos ==2) { EEPROM_Clear(); GUI_Control_Options(); } // Empty if (LCD_Col_Pos ==1 &&LCD_Row_Pos ==2) { GUI_Control_Options(); } } void GUI_Memory() { lcd.clear (); // Texto lcd.setCursor (0, 0); lcd.print("Memory Options:"); lcd.setCursor (1, 2); lcd.print("Save"); lcd.setCursor (1, 3); lcd.print("Load"); lcd.setCursor (7, 2); lcd.print("Empty"); lcd.setCursor (7, 3); lcd.print("Clear"); lcd.setCursor (14, 3); lcd.print("Cancel"); // Cursor LCD_Col_Pos =0; // posicion de cursor LCD_Row_Pos =2; // configuracion de cursor Cursor_Conf_Clear(); // limpiar array // Acciones Cursor_Conf[2][0] =1; // Save Cursor_Conf[3][0] =1; // Load Cursor_Conf[3][6] =1; // Clear Cursor_Conf[2][6] =1; // Empty Cursor_Conf[3][13] =1; // Cancel // navegar GUI_Navegar(0, 0); // Acciones // Load if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==3) { EEPROM_Load(); } // Clear if (LCD_Col_Pos ==6 &&LCD_Row_Pos ==3) { EEPROM_Clear(); } // Save if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==2) { EEPROM_Save(); } // Empty if (LCD_Col_Pos ==6 &&LCD_Row_Pos ==2) { EEPROM_Empty(); } // Cancel if (LCD_Col_Pos ==3 &&LCD_Row_Pos ==13) {null } }nullvoid EEPROM_Save() { lcd.clear (); lcd.setCursor (17, 1); for(int Canal =1; Canal <=512; Canal ++) { EEPROM.write(Canal, DMX_Values[Canal]); // lectura desde EEPROM lcd.print (Canal, BIN); } lcd.clear (); lcd.setCursor (3, 1); lcd.print ("Memory Saved!"); delay (1000); } void EEPROM_Load() { lcd.clear (); lcd.setCursor (17, 1); for(int Canal =1; Canal <=512; Canal ++) { DMX_Values[Canal] =EEPROM.read(Canal); // lectura desde EEPROM ArduinoDmx0.TxBuffer[Canal - 1] =DMX_Values[Canal]; // salida a DMX lcd.print (Canal, BIN); } lcd.clear (); lcd.setCursor (3, 1); lcd.print ("Memory Loaded!"); delay (1000); } void EEPROM_Empty() { lcd.clear (); lcd.setCursor (17, 1); for(int Canal =0; Canal <=512; Canal ++) { DMX_Values[Canal] =0; // lectura desde EEPROM ArduinoDmx0.TxBuffer[Canal] =0; // salida a DMX lcd.print (Canal, BIN); } lcd.clear (); lcd.setCursor (3, 1); lcd.print ("Memory Emptied!"); delay (1000); } void EEPROM_Clear() { lcd.clear (); lcd.setCursor (17, 1); for(int Canal =0; Canal <=512; Canal ++) { DMX_Values[Canal] =0; // lectura desde EEPROM ArduinoDmx0.TxBuffer[Canal] =0; // salida a DMX EEPROM.write (Canal, 0); // escritura EEPROM lcd.print (Canal, BIN); } lcd.clear (); lcd.setCursor (3, 1); lcd.print ("Memory Cleaned!"); delay (1000); } void GUI_Control_Options() { iniciar:// LCD lcd.clear (); lcd.setCursor (0, 0); lcd.print ("Control Options:"); lcd.setCursor (2, 2); lcd.print ("Unitary"); lcd.setCursor (2, 3); lcd.print ("Matrix"); lcd.setCursor (12, 2); lcd.print ("Chaser"); lcd.setCursor (12, 3); lcd.print ("Multiply"); lcd.setCursor (12, 1); lcd.print ("Config"); lcd.setCursor (2, 1); lcd.print ("Memory"); // Cursor LCD_Col_Pos =1; // posicion de cursor LCD_Row_Pos =2; // configuracion de cursor Cursor_Conf_Clear(); // limpiar array // Acciones Cursor_Conf[2][1] =1; // Unitary Cursor_Conf[3][1] =1; // Matrix Cursor_Conf[2][11] =1; // Chaser Cursor_Conf[3][11] =1; // Multiply Cursor_Conf[1][11] =1; // Config Cursor_Conf[1][1] =1; // Memory // navegar GUI_Navegar(0, 0); // Acciones // Unitary if (LCD_Col_Pos ==1 &&LCD_Row_Pos ==2) { GUI_Control_Unit(); } // Matrix if (LCD_Col_Pos ==1 &&LCD_Row_Pos ==3) { GUI_Control_Matrix(); } // Chaser if (LCD_Col_Pos ==11 &&LCD_Row_Pos ==2) { GUI_Control_Chaser(); } // Multiply if (LCD_Col_Pos ==11 &&LCD_Row_Pos ==3) { GUI_Control_Multiply(); } // Config if (LCD_Col_Pos ==11 &&LCD_Row_Pos ==1) { GUI_Config(); } // Config if (LCD_Col_Pos ==1 &&LCD_Row_Pos ==1) { GUI_Memory(); goto iniciar; } }nullvoid GUI_Config() { Inicio:byte Back_Light_Value =EEPROM.read(513); byte Contrast_Value =EEPROM.read(514); // GUI lcd.clear (); lcd.setCursor (0, 0); lcd.print ("LCD Config:"); lcd.setCursor (15, 0); lcd.print ("About"); lcd.setCursor (3, 1); lcd.print ("Back Light:"); Numerico_Write(Back_Light_Value, 15, 1); lcd.setCursor (5, 2); lcd.print ("Contrast:"); Numerico_Write(Contrast_Value, 15, 2); lcd.setCursor (15, 3); lcd.print ("Ctrl"); // Cursor LCD_Col_Pos =14; // posicion de cursor LCD_Row_Pos =2; // posicion e cursor // configuracion de cursor Cursor_Conf_Clear(); // limpiar array // Cursores Cursor_Conf[1][14] =1; // Back Light Value Cursor_Conf[2][14] =1; // Contrast Value Cursor_Conf[3][14] =1; // control Cursor_Conf[0][14] =1; // About // navegar Navegacion:GUI_Navegar(0, 0); // Acciones //Back Light Value if (LCD_Col_Pos ==14 &&LCD_Row_Pos ==1) { Num_Row_Pos =1; Num_Col_Pos =15; Numerico_Calc (1); if (Num_Val ==712) { lcd.setCursor (14, 1); lcd.print("a"); // indicar que es analogo digitalWrite(Boton_Array_3, LOW); // lectura linea 3 lcd.blink(); while (digitalRead(Boton_Array_D) ==HIGH &&digitalRead(Boton_Center) ==HIGH) // enter y center para paro { Num_Val =analogRead(Pot); // lectura desde el potenciometro Num_Val =Num_Val / 4; // / 4 porque es de 12 bits Numerico_Write(Num_Val, 15, 1); analogWrite(Back_Light_PWM, Num_Val); atraso (50); // retardo de lectura } lcd.noBlink(); digitalWrite(Boton_Array_3, HIGH); // lectura linea 3 delay(300); // retraso para center goto salida; } if (Num_Val> 255) { Num_Val =255; Numerico_Write (255, 15, 1); } analogWrite(Back_Light_PWM, Num_Val); salida:// mecanismo para on off Enable if (Num_Val ==0) { Back_Light_On_Off =0; } if (Num_Val> 0) { Back_Light_On_Off =1; } EEPROM.write(513, Num_Val); // guardar valor nuevo goto Navegacion; } //Contrast Value if (LCD_Col_Pos ==14 &&LCD_Row_Pos ==2) { Num_Row_Pos =2; Num_Col_Pos =15; Numerico_Calc (1); if (Num_Val ==712) { lcd.setCursor (14, 2); lcd.print("a"); // indicar que es analogo digitalWrite(Boton_Array_3, LOW); // lectura linea 3 lcd.blink(); while (digitalRead(Boton_Array_D) ==HIGH &&digitalRead(Boton_Center) ==HIGH) // enter y center para paro { Num_Val =analogRead(Pot); // lectura desde el potenciometro Num_Val =Num_Val / 4; // / 4 porque es de 12 bits if (Num_Val> 149) // limite menor de contraste LCD { Numerico_Write(Num_Val, 15, 2); analogWrite(Contrast_PWM, Num_Val); } atraso (50); // retardo de lectura } lcd.noBlink(); digitalWrite(Boton_Array_3, HIGH); // lectura linea 3 delay(300); // retraso para center goto salir; } if (Num_Val> 255) { Num_Val =255; Numerico_Write (255, 15, 2); } if (Num_Val <150) { Num_Val =150; // limite menor de contraste LCD Numerico_Write (150, 15, 2); } analogWrite(Contrast_PWM, Num_Val); salir:EEPROM.write(514, Num_Val); // guardar valor nuevo goto Navegacion; } // Exit if (LCD_Col_Pos ==14 &&LCD_Row_Pos ==3) { GUI_Control_Options(); goto Navegacion; } // About if (LCD_Col_Pos ==14 &&LCD_Row_Pos ==0) { GUI_About(); while (digitalRead(Boton_Center) ==HIGH) { // esperamos a que se precione enter } delay(300); // retardo para el rebote del boton goto Inicio; } goto Navegacion; }nullvoid GUI_Control_Multiply() { int First_Channel =1; long Multiply =0; long Quantity =0; int Value =255; iniciar:// LCD lcd.clear (); lcd.setCursor (3, 0); lcd.print ("Value"); lcd.setCursor (0, 1); lcd.print ("First CH Ctrl"); lcd.setCursor (0, 2); lcd.print ("Multiply Memory"); lcd.setCursor (0, 3); lcd.print ("Quantity Apply"); Numerico_Write (Value, 9, 0); Numerico_Write (First_Channel, 9, 1); Numerico_Write (Multiply, 9, 2); Numerico_Write (Quantity, 9, 3); // Cursor LCD_Col_Pos =8; // posicion de cursor LCD_Row_Pos =0; Siguiente:// configuracion de cursor Cursor_Conf_Clear(); // limpiar array // Acciones Cursor_Conf[1][8] =1; // first Channel Cursor_Conf[3][8] =1; // quantity Cursor_Conf[2][8] =1; // Multiply Cursor_Conf[1][13] =1; // control Cursor_Conf[2][13] =1; // Memory Cursor_Conf[3][13] =1; // apply Cursor_Conf[0][8] =1; // value // navegar GUI_Navegar(0, 0); // Acciones // Control if (LCD_Col_Pos ==13 &&LCD_Row_Pos ==1) { GUI_Control_Options(); } // Memory if (LCD_Col_Pos ==13 &&LCD_Row_Pos ==2) { GUI_Memory(); goto iniciar; } // Apply if (LCD_Col_Pos ==13 &&LCD_Row_Pos ==3) { // Validar datos long valid =Multiply * Quantity; if (valid> 512) // si no es valido { lcd.setCursor(13, 0); lcd.print("Error! "); goto Siguiente; } // calcular lcd.setCursor(13, 0); lcd.print(" "); long canal; for (long conteo =1; conteo <=Quantity; conteo++) { if (conteo ==1) { canal =First_Channel; } if (conteo !=1) { canal =canal + Multiply; } if (canal> 512) { canal =canal - Multiply; conteo =Quantity; } lcd.setCursor(17, 0); lcd.print(canal); delay (5); ArduinoDmx0.TxBuffer[canal - 1] =Value; DMX_Values[canal] =Value; } lcd.setCursor(13, 0); lcd.print("Ok!"); goto Siguiente; } // First Channel if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==1) { Num_Row_Pos =1; Num_Col_Pos =9; Num_Val =First_Channel; // para dejar el numero que estaba si no se cambia Numerico_Calc(0); First_Channel =Num_Val; if (First_Channel ==0) { First_Channel =1; Numerico_Write (First_Channel, 9, 1); } if (First_Channel> 512) { First_Channel =512; Numerico_Write (First_Channel, 9, 1); } } // Multiply if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==2) { Num_Row_Pos =2; Num_Col_Pos =9; Num_Val =Multiply; // para dejar el numero que estaba si no se cambia Numerico_Calc(0); Multiply =Num_Val; if (Multiply ==0) { Multiply =1; Numerico_Write (Multiply, 9, 2); } if (Multiply> 512) { Multiply =512; Numerico_Write (Multiply, 9, 2); } } // Quantity if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==3) { Num_Row_Pos =3; Num_Col_Pos =9; Num_Val =Quantity; // para dejar el numero que estaba si no se cambia Numerico_Calc(0); Quantity =Num_Val; if (Quantity ==0) { Quantity =1; Numerico_Write (Quantity, 9, 3); } if (Quantity> 512) { Quantity =512; Numerico_Write (Quantity, 9, 3); } } // Value if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==0) { Num_Row_Pos =0; Num_Col_Pos =9; Num_Val =Value; // para dejar el numero que estaba si no se cambia Numerico_Calc(1); Value =Num_Val; if (Value> 255) { Value =255; Numerico_Write (Value, 9, 0); } } goto Siguiente; } void GUI_Control_Chaser() { long Delay =1; long First =1; long Final =0; iniciar:// LCD lcd.clear (); lcd.setCursor (0, 0); lcd.print ("ChaserCH ---"); lcd.setCursor (3, 1); lcd.print ("Delay x10=mS"); lcd.setCursor (0, 2); lcd.print ("First CH Ctrl"); lcd.setCursor (0, 3); lcd.print ("Final CH Start"); Numerico_Write (Delay, 9, 1); Numerico_Write (First, 9, 2); Numerico_Write (Final, 9, 3); // Cursor LCD_Col_Pos =8; // posicion de cursor LCD_Row_Pos =1; Siguiente:// configuracion de cursor Cursor_Conf_Clear(); // limpiar array // Acciones Cursor_Conf[1][8] =1; // Delay Cursor_Conf[2][8] =1; // First Cursor_Conf[3][8] =1; // Final Cursor_Conf[2][14] =1; // control Cursor_Conf[3][14] =1; // Start // navegar GUI_Navegar(0, 0); // Acciones // Control if (LCD_Col_Pos ==14 &&LCD_Row_Pos ==2) { GUI_Control_Options(); } // Start if (LCD_Col_Pos ==14 &&LCD_Row_Pos ==3) { long ciclo_longitud =1300; // numero multiplicador aprox para 1 seg long ciclo =0; long Delay_Cont =0; int canal =First; lcd.setCursor(15,3); lcd.print("Stop "); // borrar canales previos for(int Canales =0; Canales <=512; Canales ++) { DMX_Values[Canales] =0; // lectura desde EEPROM ArduinoDmx0.TxBuffer[Canales] =0; // salida a DMX } while (digitalRead(Boton_Center) ==HIGH) // lectura del boton centro { ciclo =ciclo + 1; if (ciclo ==ciclo_longitud) { Delay_Cont =Delay_Cont + 1; if (Delay_Cont ==Delay) { if (canal> Final) { canal =First; } Numerico_Write (canal, 9, 0); // apagar lo anterior for (long contar =First; contar <=Final; contar ++) { ArduinoDmx0.TxBuffer[contar - 1] =0; DMX_Values[contar] =0; } // encender el siguiente ArduinoDmx0.TxBuffer[canal - 1] =255; DMX_Values[canal] =255; Delay_Cont =0; canal =canal + 1; } ciclo =0; } } lcd.setCursor(15,3); lcd.print("Start"); delay (300); // evita que le gane la descarga del capacitor goto Siguiente; } // Delay if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==1) { Num_Row_Pos =1; Num_Col_Pos =9; Num_Val =Delay; // para dejar el numero que estaba si no se cambia Numerico_Calc(0); Delay =Num_Val; } // First if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==2) { Num_Row_Pos =2; Num_Col_Pos =9; Num_Val =First; // para dejar el numero que estaba si no se cambia Numerico_Calc(0); First =Num_Val; if (First ==0) { First =1; Numerico_Write (First, 9, 2); } if (First> 512) { First =512; Numerico_Write (First, 9, 2); } } // Final if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==3) { Num_Row_Pos =3; Num_Col_Pos =9; Num_Val =Final; // para dejar el numero que estaba si no se cambia Numerico_Calc(0); Final =Num_Val; if (Final ==0) { Final =1; Numerico_Write (Final, 9, 3); } if (Final> 512) { Final =512; Numerico_Write (Final, 9, 3); } } goto Siguiente; } void Numerico_Write (int valor, int col, int row) { //posicionar el valor en los campos 000 lcd.setCursor (col, row); lcd.print ("000"); if (valor <10) { lcd.setCursor (col + 2, row); } if (valor> 9 &&valor <100) { lcd.setCursor (col + 1, row); } if (valor> 99) { lcd.setCursor (col, row); } lcd.print (valor); } void GUI_Control_Unit() { Inicio:Canal_Actual =1; // GUI lcd.clear (); lcd.setCursor (0, 0); lcd.print ("Unitary Control:"); lcd.setCursor (14, 2); lcd.print ("Ctrl"); lcd.setCursor (14, 3); lcd.print ("Memory"); lcd.setCursor (0, 2); lcd.print ("Channel:001"); lcd.setCursor (2, 3); lcd.print ("Value:"); Numerico_Write(DMX_Values[1], 9, 3); // Cursor LCD_Col_Pos =8; // posicion de cursor LCD_Row_Pos =2; // posicion e cursor // configuracion de cursor Cursor_Conf_Clear(); // limpiar array // Cursores Cursor_Conf[2][8] =1; // Channel Cursor_Conf[3][8] =1; // Value Cursor_Conf[2][13] =1; // Control Cursor_Conf[3][13] =1; // Memory // navegar Navegacion:GUI_Navegar(0, 0); // Acciones //Channel if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==2) { Numerico_Write(Canal_Actual, 9, 2); Num_Row_Pos =2; Num_Col_Pos =9; Num_Val =Canal_Actual; // para dejar el numero que estaba si no se cambia Numerico_Calc (0); if (Num_Val> 512) { Num_Val =512; Numerico_Write (512, 9, 2); } if (Num_Val <1) { Num_Val =1; Numerico_Write (1, 9, 2); } // mostrar valor actual del canal Canal_Actual =Num_Val; Numerico_Write(DMX_Values[Canal_Actual], 9, 3); } // Value if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==3) { Num_Row_Pos =3; Num_Col_Pos =9; Num_Val =DMX_Values[Canal_Actual]; // para dejar el numero que estaba si no se cambia Numerico_Calc (1); if (Num_Val ==612) // ubicar { Ubicar(); } if (Num_Val ==712) // analogo { Analog_Read_DMX(9, 3); goto Navegacion; } if (Num_Val> 255) { Num_Val =255; Numerico_Write (255, 9, 3); } // Escribr valor en dmx ArduinoDmx0.TxBuffer[Canal_Actual - 1] =Num_Val; DMX_Values[Canal_Actual] =Num_Val; goto Navegacion; } // Memory if (LCD_Col_Pos ==13 &&LCD_Row_Pos ==3) { GUI_Memory(); goto Inicio; } // Control if (LCD_Col_Pos ==13 &&LCD_Row_Pos ==2) { GUI_Control_Options(); } goto Navegacion; } void Ubicar() { digitalWrite(Boton_Array_4, LOW); while (digitalRead(Boton_Array_C) ==HIGH) { ArduinoDmx0.TxBuffer[Canal_Actual - 1] =255; Numerico_Write (255, Num_Col_Pos - 2, Num_Row_Pos); delay (100); ArduinoDmx0.TxBuffer[Canal_Actual - 1] =0; lcd.setCursor (Num_Col_Pos - 2, Num_Row_Pos); lcd.print (" "); delay (100); } digitalWrite(Boton_Array_4, HIGH); lcd.setCursor (Num_Col_Pos, Num_Row_Pos); } void Numerico_Calc(byte value) { // escritura del numero desde el teclado numerico si value es 1 entra opcion de A 255 y B 0 byte Salida =0; int Num_Val_Temp_1 =0; int Num_Val_Temp_2 =0; int Num_Val_Temp_3 =0; lcd.setCursor (Num_Col_Pos, Num_Row_Pos); lcd.print("___"); lcd.blink(); // mostrar cursor //Num_Val =0; Num_Col_Pos =Num_Col_Pos + 2; lcd.setCursor (Num_Col_Pos, Num_Row_Pos); // primer numero Numerico_Read(); // leer boton if (Boton_Calc <=9) { lcd.print (Boton_Calc); // escribir valor calculado lcd.setCursor (Num_Col_Pos, Num_Row_Pos); Num_Val =Boton_Calc; // valor calculado Num_Val_Temp_1 =Boton_Calc; // valor temporal para el acarreo } if (Boton_Calc ==14) // enter { goto Salida; // num val =0 } if (value ==1) // si es un valor { if (Boton_Calc ==10) // 255 { Num_Val =255; goto Salida; } if (Boton_Calc ==11) // 000 { Num_Val =0; goto Salida; } if (Boton_Calc ==12) // ubicar { Num_Val =612; goto Salida_Option; } if (Boton_Calc ==13) // analogo { Num_Val =712; goto Salida_Option; } } // segundo numero Numerico_Read(); // leer boton if (Boton_Calc ==14) // enter { Num_Val =Num_Val_Temp_1; goto Salida; // num val =num val anterior } if (value ==1) // si es un valor { if (Boton_Calc ==10) // 255 { Num_Val =255; goto Salida; } if (Boton_Calc ==11) // 000 { Num_Val =0; goto Salida; } if (Boton_Calc ==12) // ubicar { Num_Val =612; goto Salida_Option; } if (Boton_Calc ==13) // analogo { Num_Val =712; goto Salida_Option; } } if (Boton_Calc <=9) { // recorrer numero ya impreso Num_Col_Pos =Num_Col_Pos - 1; lcd.setCursor (Num_Col_Pos, Num_Row_Pos); lcd.print (Num_Val_Temp_1); // dibujar numero nuevo lcd.print (Boton_Calc); Num_Val_Temp_2 =Boton_Calc; Num_Col_Pos =Num_Col_Pos + 1; lcd.setCursor (Num_Col_Pos, Num_Row_Pos); } // Tercer numero Numerico_Read(); // leer boton if (Boton_Calc ==14) // enter { Num_Val =(Num_Val_Temp_1 * 10) + Num_Val_Temp_2; goto Salida; } if (value ==1) // si es un valor { if (Boton_Calc ==10) // 255 { Num_Val =255; goto Salida; } if (Boton_Calc ==11) // 000 { Num_Val =0; goto Salida; } if (Boton_Calc ==12) // ubicar { Num_Val =612; goto Salida_Option; } if (Boton_Calc ==13) // analogo { Num_Val =712; goto Salida_Option; } } if (Boton_Calc <=9) { // recorrer numero ya impreso Num_Col_Pos =Num_Col_Pos - 2; lcd.setCursor (Num_Col_Pos, Num_Row_Pos); lcd.print (Num_Val_Temp_1); lcd.print (Num_Val_Temp_2); // dibujar numero nuevo Num_Col_Pos =Num_Col_Pos + 2; lcd.setCursor (Num_Col_Pos, Num_Row_Pos); lcd.print (Boton_Calc); Num_Val =Boton_Calc + (Num_Val_Temp_1 * 100) + (Num_Val_Temp_2 * 10); } Salida:lcd.noBlink(); // pintar los ceros antes del numero Numerico_Write (Num_Val, Num_Col_Pos - 2, Num_Row_Pos); Num_Col_Pos =Num_Col_Pos - 4; // regresar el cursor a su ligar lcd.setCursor (Num_Col_Pos, Num_Row_Pos); Salida_Option:{ lcd.noBlink(); lcd.setCursor (Num_Col_Pos, Num_Row_Pos); atraso (300); // rebote de boton } }nullvoid Numerico_Read() { long Num_Barrido_Time =5; // tiempo entre barrido de keys Boton_Calc =17; // limpiar valor para lectura while (Boton_Calc ==17) // valor calculado # E * F, 17 sin valor calculado { // Barrido // Linea 1 digitalWrite(Boton_Array_1, LOW); // lectura linea 1 // Lectura 1A =1 if (digitalRead(Boton_Array_A) ==LOW) { Boton_Calc =1; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); // Lectura 1B =6 if (digitalRead(Boton_Array_B) ==LOW) { Boton_Calc =4; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); // Lectura 1C =7 if (digitalRead(Boton_Array_C) ==LOW) { Boton_Calc =7; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); // Lectura 1D =* =15 if (digitalRead(Boton_Array_D) ==LOW) { Boton_Calc =15; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); digitalWrite(Boton_Array_1, HIGH); // lectura linea 1 // Linea 2 digitalWrite(Boton_Array_2, LOW); // lectura linea 2 // Lectura 2A =2 if (digitalRead(Boton_Array_A) ==LOW) { Boton_Calc =2; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); // Lectura 2B =5 if (digitalRead(Boton_Array_B) ==LOW) { Boton_Calc =5; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); // Lectura 2C =8 if (digitalRead(Boton_Array_C) ==LOW) { Boton_Calc =8; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); // Lectura 2D =0 if (digitalRead(Boton_Array_D) ==LOW) { Boton_Calc =0; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); digitalWrite(Boton_Array_2, HIGH); // lectura linea 2 // Linea 3 digitalWrite(Boton_Array_3, LOW); // lectura linea 3 // Lectura 3A =3 if (digitalRead(Boton_Array_A) ==LOW) { Boton_Calc =3; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); // Lectura 3B =4 if (digitalRead(Boton_Array_B) ==LOW) { Boton_Calc =6; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); // Lectura 3C =9 if (digitalRead(Boton_Array_C) ==LOW) { Boton_Calc =9; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); // Lectura 3D =14 if (digitalRead(Boton_Array_D) ==LOW) { Boton_Calc =14; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); digitalWrite(Boton_Array_3, HIGH); // lectura linea 3 // Linea 4 digitalWrite(Boton_Array_4, LOW); // lectura linea 4 // Lectura 4A =10 if (digitalRead(Boton_Array_A) ==LOW) { Boton_Calc =10; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); // Lectura 4B =11 if (digitalRead(Boton_Array_B) ==LOW) { Boton_Calc =11; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); // Lectura 4C =12 if (digitalRead(Boton_Array_C) ==LOW) { Boton_Calc =12; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); // Lectura 4D =13 if (digitalRead(Boton_Array_D) ==LOW) { Boton_Calc =13; delay(Boton_Delay_Teclado); } delay(Num_Barrido_Time); digitalWrite(Boton_Array_4, HIGH); // lectura linea 4 // Cursor center "enter" if (digitalRead(Boton_Center) ==LOW) { Boton_Calc =14; delay(Boton_Delay_Teclado); } } } void Analog_Read_DMX(byte col, byte row) { // escritura del numero desde el potenciometro aplica a dmx int read; lcd.setCursor (col - 1, row); lcd.print("a"); // indicar que es analogo digitalWrite(Boton_Array_3, LOW); // lectura linea 3 lcd.blink(); int valores =0; while (digitalRead(Boton_Array_D) ==HIGH &&digitalRead(Boton_Center) ==HIGH) // enter y center para paro { read =analogRead(Pot); // lectura desde el potenciometro read =read / 4; // / 4 porque es de 12 bits delay(50); if (valores !=read) { Numerico_Write(read, col, row); ArduinoDmx0.TxBuffer[Canal_Actual - 1] =read; DMX_Values[Canal_Actual] =read; valores =read; } } lcd.noBlink(); digitalWrite(Boton_Array_3, HIGH); // lectura linea 3 // retraso para center delay(300); // delay para salir de la lectura analoga }
User Input
At startup it presents options "Initial Memory", to set the initial values of RAM
- The ">" indicates where the cursor is positioned on the menu
- The "+" and the blinking cursor, the numerical symbol indicates that user input is expected
- The navigation between menus are made from the cursor up, down, right, left and center that applies as "enter"
- When "Enter" is given in a menu that requires user input appears "+ ___" and the blinking cursor indicating the user input, in this case the keypad is used if the document number is less than 3 digits press " # "that functions as an" enter "on the number pad
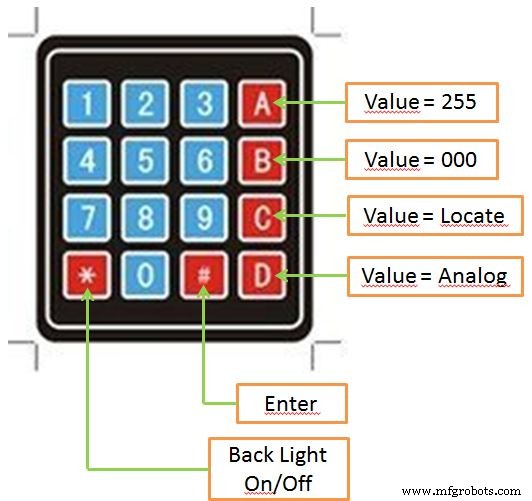
- If it is a user entry where the value of a DMX channel is indicated, you can press (after giving "enter") key "A" that you type directly "255" (maximum value of a channel) or the "B" key you type directly "000" (the minimum value of a channel)
- The "C" key functions as a means for locating a luminaire or a specific channel, just enough to select a channel position in value, to "enter" and press "C", the value would sequence channel between "000 "and" 255 ", to stop press again return to" C "
- The "*" key on or off the back light
- The "D" active only for the analog potentiometer values, the key can enter the value by turning
- The "Ctrl" returns to the menu option "Control Options"
Initial Memory:
Sets the initial values of the RAM, EEPROM read from:
- Empty (EEPROM leave intact unmodified, all channels are in "000")
- Load (loading the values stored in the EEPROM of the DMX universe)
- Clear (erase the values stored in the EEPROM and leave the channels "000")

Control Options:
The user selects the control method of different DMX channels
- "Memory" Access memory options
- "Unitaryquick access to a specific channel
- "Matrix" display a matrix of 3 x 5 with the current values of the different channels
- "Chaser" make a specific sequence between channels
- "Multiply" assign a value to a specific number of channels, with a specific numerical jump
- "Config" access system settings
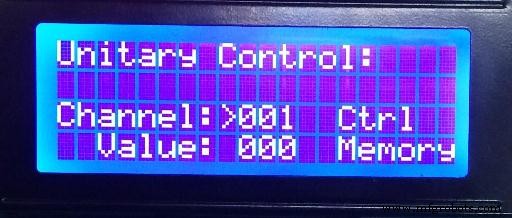
Unitary Control
It allows quick access to a specific channel
- "Channel" channel access
- "Value" access channel value
- "Ctrl" Accessing the menu "Control Options"
- "Memory" Access to the menu “Memory Options”
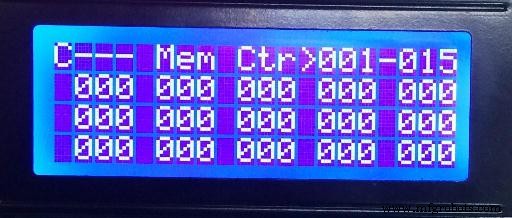
Matrix Control
Displays a matrix of 3 x 5 with the current values of different DMX channels
- "C ---" shows the number of the selected channel from the cursor
- "Mem" access "Memory Options"
- "Ctrl" access "Control Options"
- "001-015" access to the number of channels to be displayed in the matrix of 3 x 5, the first number represents the first channel and the second to the last channel
Chaser Control
Allows a specific sequence between channels
- "ChaserCH" shows the current value sequenced (after the start of sequence)
- "Delay", select the amount of time in mS (milliseconds) between each step, the value approximates the number by 10 =the number of mS
- "First CH", select the first channel of the sequence
- "Final CH". select the last channel in the sequence
- "Ctrl" access "Control Options", sequenced values do not affect the RAM out with the old values
- "Start" begins the sequence and switches to "Stop", here you can stop the sequence
Exemplo:
Select "Delay" 100 (100x10 =1000 mS), "First CH" 001 and "Final CH" 512 The result is a sequence from channel 1 to 512 and the step between the channels makes every second

Multiply Control
Assign a value to a specific number of channels, with a specific numerical jump
- "Value" selects the value to be written (000-255)
- "First CH" selects the first channel
- "Multiply" selects the number of channels to multiply
- "Quantity" select the number of times to multiply
- "Ctrl" Access"Control Options", RAM affects channel
- "Memory" Access "Memory Options"
- "Apply" Evaluates the request is not possible the application displays the message "Error", otherwise apply multiplication channels and places the selected value
Exemplo:
Select "Value" =255, "First CH" =001, "Multiply" =003 "Quantity" =170 and "Apply"
The result:170 channels from channel 1 to 510, 3 on 3 with the value 255

Memory Options
Easy access to the EEPROM options
- "Save" saves the DMX universe with current values
- "Load" load from EEPROM values previously saved DMX universe
- "Empty" Delete RAM with the current DMX values without affecting the EEPROM
- "Clear" Clear DMX universe stored in the EEPROM
- "Black" Options "Black Out", puts all channels of DMX universe with "000", without affecting the memory, to exit press "enter" or "central" and returns the above values
- Cancel (return to the previous menu without changes)

Config
Overall system configuration
- Located in"Control Options"
- "Backlight" Select dimmer value between 000-255 of the LCD backlight
- "Contrast" Select dimmer value between 150-255 LCD contrast (lower liite 150, to prevent the LCD not see)
- "Exit" returns to the previous menu
- The modified values are saved in EEPROM memory automatic
About
Displays the "About .." project and the hardware and firmware versions installed
- Located in "Config"
- To exit press "enter" or "center"
For more Information, updates repository...
Código
- DMX_Controller.ino
DMX_Controller.inoArduino
// ***************************************************************************************************************************// ***************************************************************************************************************************// ** **// ** Arduino DMX-512 Tester Controller **// ** **// ** - Firmware v0.6 **// ** - Hardware v0.0 - v0.2 **// ** **// ** - Compilado en Arduino IDE v1.0.6 **// ** http://www.arduino.cc/en/Main/OldSoftwareReleases **// ** - Compilado para Arduino Mega 2560 R3 **// ** http://www.arduino.cc/en/Main/ArduinoBoardMega2560 **// ** - Libreria Arduino cuatro universos DMX v0.3 - Deskontrol.net **// ** http://www.deskontrol.net/blog/libreria-arduino-cuatro-universos-dmx/) **// ** - Libreria LCD v1.2.1 - Francisco Malpartida **// ** https://bitbucket.org/fmalpartida/new-liquidcrystal/wiki/Home **// ** - Simulacion en Proteus v7.7 SP2 **// ** - Simulacion en Proteus de Arduino - Microcontrolandos **// ** http://microcontrolandos.blogspot.m x/2012/12/arduino-componentes-para-o-proteus.html **// ** **// ** Autor:**// ** **// ** Daniel Roberto Becerril Angeles **// ** daniel3514@gmail.com ** **// ** https://github.com/daniel3514/Arduino-DMX-512-Tester-Controller/ **// ** **// ** Licenciamiento:**// ** **// ** GNU General Pubic Licence Version 3 **// ** https://www.gnu.org/copyleft/gpl.html **// ** **// ***************************************************************************************************************************// ***************************************************************************************************************************// Librerias #include// libreria para LCD #include #include #include #include // libreria DMX 4 universos deskontrol four universes DMX library - http://www.deskontrol.net/blog // DMX Library #define DMX512 (0) // (250 kbaud - 2 to 512 channels) Standard USITT DMX-512 //#define DMX1024 (1) // (500 kbaud - 2 to 1024 cha nnels) Completely non standard - TESTED ok //#define DMX2048 (2) // (1000 kbaud - 2 to 2048 channels) called by manufacturers DMX1000K, DMX 4x or DMX 1M ???// Puertos, variables // DMX //int DMX_Data_Flux =2; // control de flujo de datos para dmx, 0 por default int DMX_Values [515]; // array de valores actuales DMX int Canal_Actual =1; // Botones cursor int Boton_Up =51; int Boton_Down =45; int Boton_Left =53; int Boton_Right =49; int Boton_Center =47; byte LCD_Col_Pos =0; // posicion en tiempo real de lcd byte LCD_Row_Pos =0; // posicion en tiempo real de lcd byte Cursor_Conf[4][20] ={{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0}, // config de posiciones de lcd Col Row {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0}, {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0}, {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0}}; // Botones Numerico Array int Boton_Array_1 =36; int Boton_Array_2 =34; int Boton_Array_3 =32; int Boton_Array_4 =30; int Boton_Array_A =44; int Boton_Array_B =42; int Boton_Array_C =40; int Boton_Array_D =38; byte Boton_Calc =17; // valor calculado # E * F, 17 sin valor calculado byte Num_Col_Pos =0; // posicion en tiempo real de lcd byte Num_Row_Pos =0; // posicion en tiempo real de lcd int Num_Val =0; // valor generado al calculo long Boton_Delay_Teclado =100; // delay de lectura de boton // Potenciometro int Pot =A15; // entrada de potenciometro // LCD int LCD_RS =8; // puertos de conexion de LCD int LCD_E =9; int LCD_D4 =10; int LCD_D5 =11; int LCD_D6 =12; int LCD_D7 =13; LiquidCrystal lcd(LCD_RS, LCD_E, LCD_D4, LCD_D5, LCD_D6, LCD_D7); //LCD setup int Back_Light_PWM =3; // salida para PWM de Back Light de LCD int Contrast_PWM =4; // salida para pwm de contraste de LCD byte Back_Light_On_Off =0; // saber si esta encendida o apagadavoid setup() { // DMX //pinMode(DMX_Data_Flux, OUTPUT); // Botones cursor pinMode(Boton_Up, INPUT_PULLUP); pinMode(Boton_Down, INPUT_PULLUP); pinMode(Boton_Left, INPUT_PULLUP); pinMode(Boton_Right, INPUT_PULLUP); pinMode(Boton_Center, INPUT_PULLUP); // Botones numerico pinMode(Boton_Array_1, OUTPUT); pinMode(Boton_Array_2, OUTPUT); pinMode(Boton_Array_3, OUTPUT); pinMode(Boton_Array_4, OUTPUT); pinMode(Boton_Array_A, INPUT_PULLUP); pinMode(Boton_Array_B, INPUT_PULLUP); pinMode(Boton_Array_C, INPUT_PULLUP); pinMode(Boton_Array_D, INPUT_PULLUP); digitalWrite(Boton_Array_1, HIGH); digitalWrite(Boton_Array_2, HIGH); digitalWrite(Boton_Array_3, HIGH); digitalWrite(Boton_Array_4, HIGH); // LCD pinMode(LCD_RS, OUTPUT); pinMode(LCD_E, OUTPUT); pinMode(LCD_D7, OUTPUT); pinMode(LCD_D6, OUTPUT); pinMode(LCD_D5, OUTPUT); pinMode(LCD_D4, OUTPUT); pinMode(Back_Light_PWM, OUTPUT); lcd.begin(20, 4); //tamao de LCD // DMX ArduinoDmx0.set_tx_address(1); // poner aqui la direccion de inicio de DMX ArduinoDmx0.set_tx_channels(512); // poner aqui el numero de canales a transmitir ArduinoDmx0.init_tx(DMX512); // iniciar transmision universo 0, modo estandar DMX512 // no conectados pinMode(5, OUTPUT); digitalWrite(5, LOW); pinMode(6, OUTPUT); digitalWrite(6, LOW); pinMode(7, OUTPUT); digitalWrite(7, LOW); pinMode(22, OUTPUT); digitalWrite(22, LOW); pinMode(23, OUTPUT); digitalWrite(23, LOW); pinMode(24, OUTPUT); digitalWrite(24, LOW); pinMode(25, OUTPUT); digitalWrite(25, LOW); pinMode(26, OUTPUT); digitalWrite(26, LOW); pinMode(27, OUTPUT); digitalWrite(27, LOW); pinMode(28, OUTPUT); digitalWrite(28, LOW); pinMode(29, OUTPUT); digitalWrite(29, LOW); pinMode(31, OUTPUT); digitalWrite(31, LOW); pinMode(33, OUTPUT); digitalWrite(33, LOW); pinMode(35, OUTPUT); digitalWrite(35, LOW); pinMode(37, OUTPUT); digitalWrite(37, LOW); pinMode(39, OUTPUT); digitalWrite(39, LOW); pinMode(41, OUTPUT); digitalWrite(41, LOW); pinMode(43, OUTPUT); digitalWrite(43, LOW); pinMode(46, OUTPUT); digitalWrite(46, LOW); pinMode(48, OUTPUT); digitalWrite(48, LOW); pinMode(50, OUTPUT); digitalWrite(50, LOW); pinMode(52, OUTPUT); digitalWrite(52, LOW); pinMode(A0, OUTPUT); digitalWrite(A0, LOW); pinMode(A1, OUTPUT); digitalWrite(A1, LOW); pinMode(A2, OUTPUT); digitalWrite(A2, LOW); pinMode(A3, OUTPUT); digitalWrite(A3, LOW); pinMode(A4, OUTPUT); digitalWrite(A4, LOW); pinMode(A5, OUTPUT); digitalWrite(A5, LOW); pinMode(A6, OUTPUT); digitalWrite(A6, LOW); pinMode(A7, OUTPUT); digitalWrite(A7, LOW); pinMode(A8, OUTPUT); digitalWrite(A8, LOW); pinMode(A9, OUTPUT); digitalWrite(A9, LOW); pinMode(A10, OUTPUT); digitalWrite(A10, LOW); pinMode(A11, OUTPUT); digitalWrite(A11, LOW); pinMode(A12, OUTPUT); digitalWrite(A12, LOW); pinMode(A13, OUTPUT); digitalWrite(A13, LOW); pinMode(A14, OUTPUT); digitalWrite(A14, LOW); } void loop() { digitalWrite(2, HIGH); // max 485 como salida Back_Light_Init(); Contrast_Init(); GUI_About(); GUI_Memory_Init(); }void Back_Light_Init() { // ultimo estado del back light byte Back_Light_Value =EEPROM.read(513); analogWrite(Back_Light_PWM, Back_Light_Value); if (Back_Light_Value ==0) { Back_Light_On_Off =0; } if (Back_Light_Value> 0) { Back_Light_On_Off =1; } } void Contrast_Init() { // ultimo estado del comtrast byte Contrast_Value =EEPROM.read(514); analogWrite(Contrast_PWM, Contrast_Value); } void Back_Light_En() { byte Back_Light_Value =EEPROM.read(513); // lectura del ultimo valor desde la eeprom, 513 es donde se guarda el valor // encender if (Back_Light_On_Off ==0) // si esta apagada encenderla { if (Back_Light_Value ==0) // la encendemos de todos modos { analogWrite(Back_Light_PWM, 127); // aqui el valor a encender en el caso que se haya establecido apagado el back light } if (Back_Light_Value> 0) { analogWrite(Back_Light_PWM, Back_Light_Value); // encender con el valor de la eeprom } Back_Light_On_Off =1; goto salida; } // apagar if (Back_Light_On_Off ==1) // si esta encendida apagarla { analogWrite(Back_Light_PWM, 0); Back_Light_On_Off =0; } salida:{ delay(300); // para impedir repeticion del comando } } void GUI_About() { byte Firm_Ver_Ent =0; byte Firm_Ver_Dec =6; byte Hard_Ver_Ent =0; byte Hard_Ver_Dec =0; byte ID =20; lcd.clear (); lcd.noBlink(); // ocultar cursor lcd.setCursor(0, 0); for(int numero =0; numero <=512; numero ++) // efecto binario en lcd { lcd.print (numero, BIN); } lcd.clear (); lcd.setCursor(0, 3); lcd.print("http://goo.gl/kdYlj7"); lcd.setCursor(3, 0); lcd.print("Arduino DMX-512"); lcd.setCursor(1, 1); lcd.print("Tester &Controller"); // Firmware lcd.setCursor(0, 2); lcd.print("Firm v"); lcd.print(Firm_Ver_Ent); lcd.print("."); lcd.print(Firm_Ver_Dec); // Hardware lcd.setCursor(11, 2); lcd.print("Hard v"); lcd.print(Hard_Ver_Ent); lcd.print("."); lcd.print(Hard_Ver_Dec); atraso (2000); //retardo de muestra de mensaje }void Multi_Matrix(int inicial) { // dibujar banco Numerico_Write (inicial, 13, 0); Numerico_Write (inicial + 14, 17, 0); // matrix 1 Numerico_Write (DMX_Values[inicial], 1, 1); Numerico_Write (DMX_Values[inicial + 1], 5, 1); Numerico_Write (DMX_Values[inicial + 2], 9, 1); Numerico_Write (DMX_Values[inicial + 3], 13, 1); Numerico_Write (DMX_Values[inicial + 4], 17, 1); // matrix 2 Numerico_Write (DMX_Values[inicial + 5], 1, 2); Numerico_Write (DMX_Values[inicial + 6], 5, 2); Numerico_Write (DMX_Values[inicial + 7], 9, 2); Numerico_Write (DMX_Values[inicial + 8], 13, 2); Numerico_Write (DMX_Values[inicial + 9], 17, 2); // matrix 3 Numerico_Write (DMX_Values[inicial + 10], 1, 3); Numerico_Write (DMX_Values[inicial + 11], 5, 3); Numerico_Write (DMX_Values[inicial + 12], 9, 3); Numerico_Write (DMX_Values[inicial + 13], 13, 3); Numerico_Write (DMX_Values[inicial + 14], 17, 3); } void GUI_Control_Matrix() { int Inicial =1; Canal_Actual =1; inicio:lcd.clear(); lcd.setCursor (0, 0); lcd.print("c--- Mem Ctr -"); Multi_Matrix (Inicial); // Cursor LCD_Col_Pos =12; // posicion de cursor LCD_Row_Pos =0; // posicion e cursor // configuracion de cursor Cursor_Conf_Clear(); // limpiar array // Row 0 Cursor_Conf[0][4] =1; // Memory Cursor_Conf[0][8] =1; // Unit Cursor_Conf[0][12] =1; // Banco Inicial Cursor_Conf[0][16] =1; // Banco Final // Row 1 Cursor_Conf[1][0] =1; Cursor_Conf[1][4] =1; Cursor_Conf[1][8] =1; Cursor_Conf[1][12] =1; Cursor_Conf[1][16] =1; // Row 2 Cursor_Conf[2][0] =1; Cursor_Conf[2][4] =1; Cursor_Conf[2][8] =1; Cursor_Conf[2][12] =1; Cursor_Conf[2][16] =1; // Row 3 Cursor_Conf[3][0] =1; Cursor_Conf[3][4] =1; Cursor_Conf[3][8] =1; Cursor_Conf[3][12] =1; Cursor_Conf[3][16] =1; // navegar Banco:GUI_Navegar(1, Inicial); // Acciones // Memory if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==0) { GUI_Memory(); goto inicio; } // Control if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==0) { GUI_Control_Options(); goto inicio; } // Banco Inicial if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==0) { Num_Row_Pos =0; Num_Col_Pos =13; Num_Val =Inicial; // para dejar el numero que estaba si no se cambia Numerico_Calc(0); if (Num_Val> 498) // limite de matriz { Num_Val =498; } if (Num_Val ==0) // limite de matriz { Num_Val =1; } Inicial =Num_Val; goto inicio; } // Banco Final if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==0) { Num_Row_Pos =0; Num_Col_Pos =17; if (Inicial ==1) Num_Val =15; else Num_Val =Inicial - 14; // para dejar el numero que estaba si no se cambia Numerico_Calc(0); if (Num_Val> 512) // limite de matriz { Inicial =498; goto inicio; } if (Num_Val <15) // limite de matriz { Inicial =1; goto inicio; } Inicial =Num_Val - 14; goto inicio; } // posicion 1 if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==1) { Canal_Actual =Inicial; goto Salida_DMX; } // posicion 2 if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==1) { Canal_Actual =Inicial + 1; goto Salida_DMX; } // posicion 3 if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==1) { Canal_Actual =Inicial + 2; goto Salida_DMX; } // posicion 4 if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==1) { Canal_Actual =Inicial + 3; goto Salida_DMX; } // posicion 5 if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==1) { Canal_Actual =Inicial + 4; goto Salida_DMX; } // posicion 6 if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==2) { Canal_Actual =Inicial + 5; goto Salida_DMX; } // posicion 7 if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==2) { Canal_Actual =Inicial + 6; goto Salida_DMX; } // posicion 8 if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==2) { Canal_Actual =Inicial + 7; goto Salida_DMX; } // posicion 9 if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==2) { Canal_Actual =Inicial + 8; goto Salida_DMX; } // posicion 10 if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==2) { Canal_Actual =Inicial + 9; goto Salida_DMX; } // posicion 11 if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==3) { Canal_Actual =Inicial + 10; goto Salida_DMX; } // posicion 12 if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==3) { Canal_Actual =Inicial + 11; goto Salida_DMX; } // posicion 13 if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==3) { Canal_Actual =Inicial + 12; goto Salida_DMX; } // posicion 14 if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==3) { Canal_Actual =Inicial + 13; goto Salida_DMX; } // posicion 15 if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==3) { Canal_Actual =Inicial + 14; goto Salida_DMX; } Salida_DMX:Num_Row_Pos =LCD_Row_Pos; Num_Col_Pos =LCD_Col_Pos + 1; Num_Val =DMX_Values[Canal_Actual]; // para dejar el numero que estaba si no se cambia Numerico_Calc(1); if (Num_Val ==612) // ubicar { Ubicar(); Num_Col_Pos =Num_Col_Pos - 4; } if (Num_Val ==712) // analogo { Analog_Read_DMX(Num_Col_Pos - 2, Num_Row_Pos); Num_Col_Pos =Num_Col_Pos - 4; goto Banco; } if (Num_Val> 255) { Num_Val =255; Numerico_Write (255, Num_Col_Pos + 2, Num_Row_Pos); } ArduinoDmx0.TxBuffer[Canal_Actual - 1] =Num_Val; DMX_Values[Canal_Actual] =Num_Val; goto Banco; } void Cursor_Conf_Clear() { for (byte Conteo_Col =0; Conteo_Col <=19; Conteo_Col ++) { for (byte Conteo_Row =0; Conteo_Row <=3; Conteo_Row ++) { Cursor_Conf[Conteo_Row][Conteo_Col] =0; } } } void GUI_Navegar(byte matrix, int banco) { long Boton_Delay_Cursor =300; // delay de lectura de boton byte LCD_Col_Pos_Ant; // saber el estado anterior para borrar cursor byte LCD_Row_Pos_Ant; // saber el estado anterior para borrar cursor // guardar valor anterior de row col LCD_Col_Pos_Ant =LCD_Col_Pos; LCD_Row_Pos_Ant =LCD_Row_Pos; // Dibujar cursor lcd.setCursor (LCD_Col_Pos, LCD_Row_Pos); lcd.print(">"); // navegacion Dibujar:byte Dibujar_Cursor =0; // saber si dibujar cursor para evitar repeticiones en lcd, 0 no dibujar, 1 dibujar>, 2 dibujar + // LCD Back Light * digitalWrite(Boton_Array_1, LOW); // lectura linea 1 if (digitalRead(Boton_Array_D) ==LOW) { delay(Boton_Delay_Teclado); Back_Light_En(); } digitalWrite(Boton_Array_1, HIGH); // lectura linea 1 // Left if (digitalRead(Boton_Left) ==LOW) { delay (Boton_Delay_Cursor); byte Salida_Left =0; byte LCD_Col_Pos_Temp =0; LCD_Col_Pos_Temp =LCD_Col_Pos; while (Salida_Left ==0) { if (LCD_Col_Pos_Temp ==0) { LCD_Col_Pos_Temp =20; } LCD_Col_Pos_Temp =LCD_Col_Pos_Temp - 1; if (Cursor_Conf[LCD_Row_Pos][LCD_Col_Pos_Temp] ==1) { LCD_Col_Pos =LCD_Col_Pos_Temp; Dibujar_Cursor =1; Salida_Left =1; } } goto Salida; } // Right if (digitalRead(Boton_Right) ==LOW) { delay(Boton_Delay_Cursor); byte Salida_Right =0; byte LCD_Col_Pos_Temp =0; LCD_Col_Pos_Temp =LCD_Col_Pos; while (Salida_Right ==0) { LCD_Col_Pos_Temp =LCD_Col_Pos_Temp + 1; if (LCD_Col_Pos_Temp> =20) { LCD_Col_Pos_Temp =0; // regresar al cero } if (Cursor_Conf[LCD_Row_Pos][LCD_Col_Pos_Temp] ==1) { LCD_Col_Pos =LCD_Col_Pos_Temp; Dibujar_Cursor =1; Salida_Right =1; } } goto Salida; } // Down if (digitalRead(Boton_Down) ==LOW) { delay(Boton_Delay_Cursor); byte Salida_Down =0; byte LCD_Row_Pos_Temp =0; LCD_Row_Pos_Temp =LCD_Row_Pos; while (Salida_Down ==0) { LCD_Row_Pos_Temp =LCD_Row_Pos_Temp + 1; if (LCD_Row_Pos_Temp> =4) { LCD_Row_Pos_Temp =0; // regresar al cero } if (Cursor_Conf[LCD_Row_Pos_Temp][LCD_Col_Pos] ==1) { LCD_Row_Pos =LCD_Row_Pos_Temp; Dibujar_Cursor =1; Salida_Down =1; } } goto Salida; } // Up if (digitalRead(Boton_Up) ==LOW) { delay(Boton_Delay_Cursor); byte Salida_Up =0; byte LCD_Row_Pos_Temp; LCD_Row_Pos_Temp =LCD_Row_Pos; while (Salida_Up ==0) { if (LCD_Row_Pos_Temp <=0) { LCD_Row_Pos_Temp =4; } LCD_Row_Pos_Temp =LCD_Row_Pos_Temp - 1; if (Cursor_Conf[LCD_Row_Pos_Temp][LCD_Col_Pos] ==1) { Dibujar_Cursor =1; LCD_Row_Pos =LCD_Row_Pos_Temp; Salida_Up =1; } } goto Salida; } // Center if (digitalRead(Boton_Center) ==LOW) { delay(Boton_Delay_Cursor); byte Salida_Center =0; while (Salida_Center ==0) { if (Cursor_Conf[LCD_Row_Pos][LCD_Col_Pos] ==1) { Dibujar_Cursor =2; // dibujar + Salida_Center =1; } } } Salida:// Dibujar Cursor if (Dibujar_Cursor> 0) { if (Dibujar_Cursor ==1) { // borra el anterior lcd.setCursor (LCD_Col_Pos_Ant, LCD_Row_Pos_Ant); lcd.print(" "); // escribir> lcd.setCursor (LCD_Col_Pos, LCD_Row_Pos); lcd.print(">"); // matrix print posicion if (matrix ==1) { // banco inicial if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==0) { lcd.setCursor(1, 0); lcd.print("---"); goto salida; } // banco final if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==0) { lcd.setCursor(1, 0); lcd.print("---"); goto salir; } // Memory if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==0) { lcd.setCursor(1, 0); lcd.print("---"); goto salida; } // Unitary if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==0) { lcd.setCursor(1, 0); lcd.print("---"); goto salida; } // banco 1 if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==1) { Numerico_Write (banco, 1, 0); goto salida; } // banco 2 if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==1) { Numerico_Write (banco + 1, 1, 0); goto salida; } // banco 3 if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==1) { Numerico_Write (banco + 2, 1, 0); goto salida; } // banco 4 if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==1) { Numerico_Write (banco + 3, 1, 0); goto salida; } // banco 5 if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==1) { Numerico_Write (banco + 4, 1, 0); goto salida; } // banco 6 if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==2) { Numerico_Write (banco + 5, 1, 0); goto salida; } // banco 7 if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==2) { Numerico_Write (banco + 6, 1, 0); goto salida; } // banco 8 if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==2) { Numerico_Write (banco + 7, 1, 0); goto salida; } // banco 9 if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==2) { Numerico_Write (banco + 8, 1, 0); goto salida; } // banco 10 if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==2) { Numerico_Write (banco + 9, 1, 0); goto salida; } // banco 11 if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==3) { Numerico_Write (banco + 10, 1, 0); goto salida; } // banco 12 if (LCD_Col_Pos ==4 &&LCD_Row_Pos ==3) { Numerico_Write (banco + 11, 1, 0); goto salida; } // banco 13 if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==3) { Numerico_Write (banco + 12, 1, 0); goto salida; } // banco 14 if (LCD_Col_Pos ==12 &&LCD_Row_Pos ==3) { Numerico_Write (banco + 13, 1, 0); goto salida; } // banco 15 if (LCD_Col_Pos ==16 &&LCD_Row_Pos ==3) { Numerico_Write (banco + 14, 1, 0); goto salida; } // escribir guion de bancos salida:lcd.setCursor(16, 0); lcd.print("-"); salir:{} } } else { // escribir + lcd.setCursor (LCD_Col_Pos, LCD_Row_Pos); lcd.print("+"); } //salida LCD_Col_Pos_Ant =LCD_Col_Pos; LCD_Row_Pos_Ant =LCD_Row_Pos; if (Dibujar_Cursor ==2) { goto Salir; } else { Dibujar_Cursor =0; } } goto Dibujar; Salir:{} }void GUI_Memory_Init() { lcd.clear (); // Texto lcd.setCursor (0, 0); lcd.print("Initial Memory:"); lcd.setCursor (2, 2); lcd.print("Empty"); lcd.setCursor (9, 2); lcd.print("Load"); lcd.setCursor (15, 2); lcd.print("Clear"); // Cursor LCD_Col_Pos =1; // posicion de cursor LCD_Row_Pos =2; // configuracion de cursor Cursor_Conf_Clear(); // limpiar array // Acciones Cursor_Conf[2][1] =1; // Empty Cursor_Conf[2][8] =1; // Load Cursor_Conf[2][14] =1; // Clear // navegar GUI_Navegar(0, 0); // Acciones // Load if (LCD_Col_Pos ==8 &&LCD_Row_Pos ==2) { EEPROM_Load(); GUI_Control_Options(); } // Clear if (LCD_Col_Pos ==14 &&LCD_Row_Pos ==2) { EEPROM_Clear(); GUI_Control_Options(); } // Empty if (LCD_Col_Pos ==1 &&LCD_Row_Pos ==2) { GUI_Control_Options(); } } void GUI_Memory() { lcd.clear (); // Texto lcd.setCursor (0, 0); lcd.print("Memory Options:"); lcd.setCursor (1, 2); lcd.print("Save"); lcd.setCursor (1, 3); lcd.print("Load"); lcd.setCursor (7, 2); lcd.print("Empty"); lcd.setCursor (7, 3); lcd.print("Clear"); lcd.setCursor (14, 3); lcd.print("Cancel"); // Cursor LCD_Col_Pos =0; // posicion de cursor LCD_Row_Pos =2; // configuracion de cursor Cursor_Conf_Clear(); // limpiar array // Acciones Cursor_Conf[2][0] =1; // Save Cursor_Conf[3][0] =1; // Load Cursor_Conf[3][6] =1; // Clear Cursor_Conf[2][6] =1; // Empty Cursor_Conf[3][13] =1; // Cancel // navegar GUI_Navegar(0, 0); // Acciones // Load if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==3) { EEPROM_Load(); } // Clear if (LCD_Col_Pos ==6 &&LCD_Row_Pos ==3) { EEPROM_Clear(); } // Save if (LCD_Col_Pos ==0 &&LCD_Row_Pos ==2) { EEPROM_Save(); } // Empty if (LCD_Col_Pos ==6 &&LCD_Row_Pos ==2) { EEPROM_Empty(); } // Cancel if (LCD_Col_Pos ==3 &&LCD_Row_Pos ==13) { } }void EEPROM_Save() { lcd.clear (); lcd.setCursor (17, 1); for(int Canal =1; Canal <=512; Canal ++) { EEPROM.write(Canal, DMX_Values[Canal]); // lectura desde EEPROM lcd.print (Canal, BIN); } lcd.clear (); lcd.setCursor (3, 1); lcd.print ("Memory Saved!"); delay (1000); } void EEPROM_Load() { lcd.clear (); lcd.setCursor (17, 1); for(int Canal =1; Canal <=512; Canal ++) { DMX_Values[Canal] =EEPROM.read(Canal); // lectura desde EEPROM ArduinoDmx0.TxBuffer[Canal - 1] =DMX_Values[Canal]; // salida a DMX lcd.print (Canal, BIN); } lcd.clear (); lcd.setCursor (3, 1); lcd.print ("Memory Loaded!"); delay (1000); } void EEPROM_Empty() { lcd.clear (); lcd.setCursor (17, 1); for(int Canal =0; Canal <=512; Canal ++) { DMX_Values[Canal] =0; // lectura desde EEPROM ArduinoDmx0.TxBuffer[Canal] =0; // salida a DMX lcd.print (Canal, BIN); } lcd.clear (); lcd.setCursor (3, 1); lcd.print ("Memory Emptied!"); delay (1000); } void EEPROM_Clear() { lcd.clear (); lcd.setCursor (17, 1); for(int Canal =0; Canal <=512; Canal ++) { DMX_Values[Canal] =0; // lectura desde EEPROM ArduinoDmx0.TxBuffer[Canal] =0; // salida a DMX EEPROM.write (Canal, 0); // escritura EEPROM lcd.print (Canal, BIN); } lcd.clear (); lcd.setCursor (3, 1); lcd.print ("Memory Cleaned!"); delay (1000);...This file has been truncated, please download it to see its full contents.
Repository
https://github.com/daniel3514/Arduino-DMX-512-Tester-ControllerPeças personalizadas e gabinetes
Repository
https://github.com/daniel3514/Arduino-DMX-512-Tester-Controller DMX%20Controller%20v01%20-%20Proteus%2080.pdsprjEsquemas
Repository
https://github.com/daniel3514/Arduino-DMX-512-Tester-Controller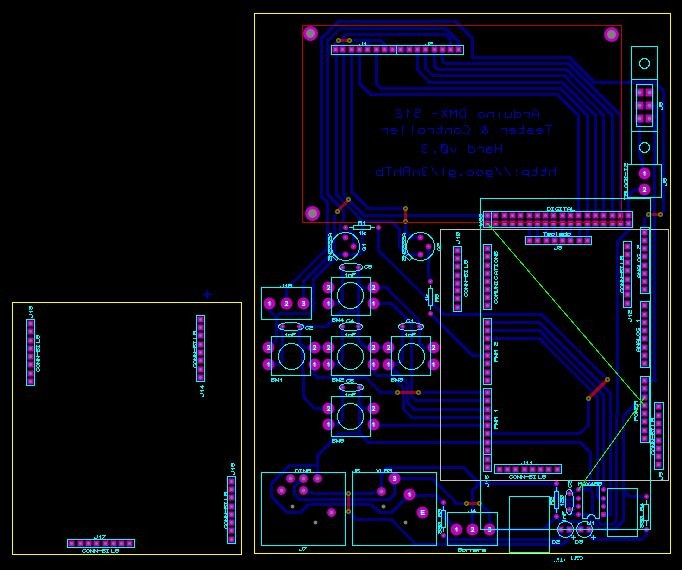
Tela de localização GPS com GPS e telas TFT
Construindo uma ponte de infravermelho com o SmartThings ThingShield
Processo de manufatura
- Controlador DMX operado pela web
- Diversão do giroscópio com anel NeoPixel
- Controlador de jogo Arduino
- Unopad - Controlador Arduino MIDI com Ableton
- Pixie:Um relógio de pulso NeoPixel baseado em Arduino
- Controle o Arduino Rover usando Firmata e o controlador do Xbox One
- Controlador de display fluorescente a vácuo
- Reconhecimento de fala e síntese com Arduino
- Arduino Home Controller ativado por Alexa
- Câmera de vigilância remota móvel