


ED BMSdiag
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Aplicativos e serviços online
 |
|
Sobre este projeto
Intenção
Estou dirigindo um carro elétrico - um smart for two elétrico. A integridade da bateria de tração é essencial e é mantida por um sistema de gerenciamento de bateria (BMS). Ele monitorará todas as 93 células durante a carga / descarga e se preocupa com um equilíbrio de nível de voltagem igualmente. Normalmente, apenas as ferramentas de serviço podem ler as informações desta ECU.
O carro está equipado com um modem GSM para acessar dados de status como estado de carga (SOC), o alcance disponível e outras informações simples. Por um certo tempo, o modem ficou no modo estendido coletando informações de diagnóstico sobre o carro. Curioso sobre o conteúdo, tentei farejar no barramento CAN para saber o que foi transmitido.
Inspirado por projetos semelhantes para outros carros elétricos - como o Nissan Leaf - eu gravei o tráfego completo do ônibus CAN enquanto dirigia ou carregava o carro. Os primeiros streams detectados incluíam realmente esses dados de diagnóstico - mas como decodificá-los?
Você encontrará detalhes sobre a detecção de barramento CAN e a engenharia reversa em um artigo separado aqui.
O que é necessário
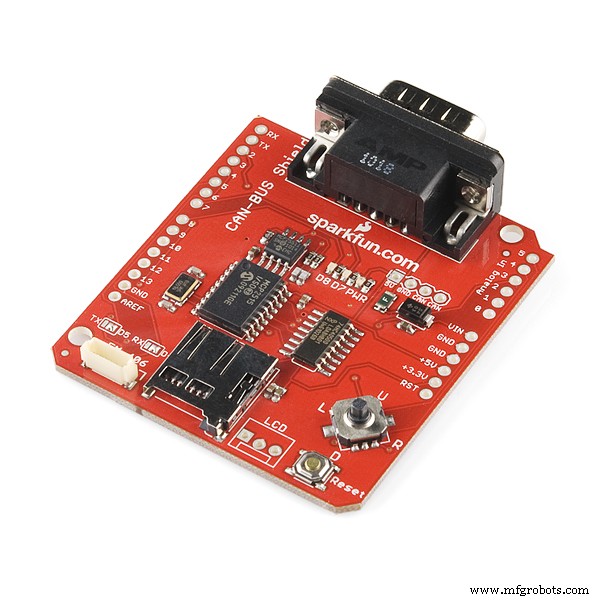
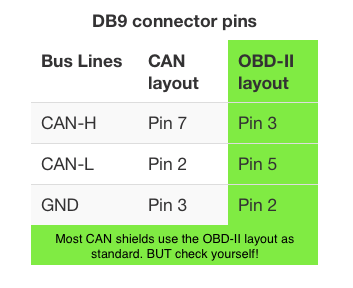
Obtenha o hardware necessário. Em carros modernos, a camada física é feita por meio do barramento CAN. Estão disponíveis pelo menos duas blindagens de barramento CAN - consulte a lista de componentes. Você deve conectar à porta de diagnóstico do carro - o conector OBD, então compre um cabo ou faça o seu próprio. NOTA:existem dois padrões para cabos OBD para DSUB-9 - escolha o correto! Veja as fotos abaixo:
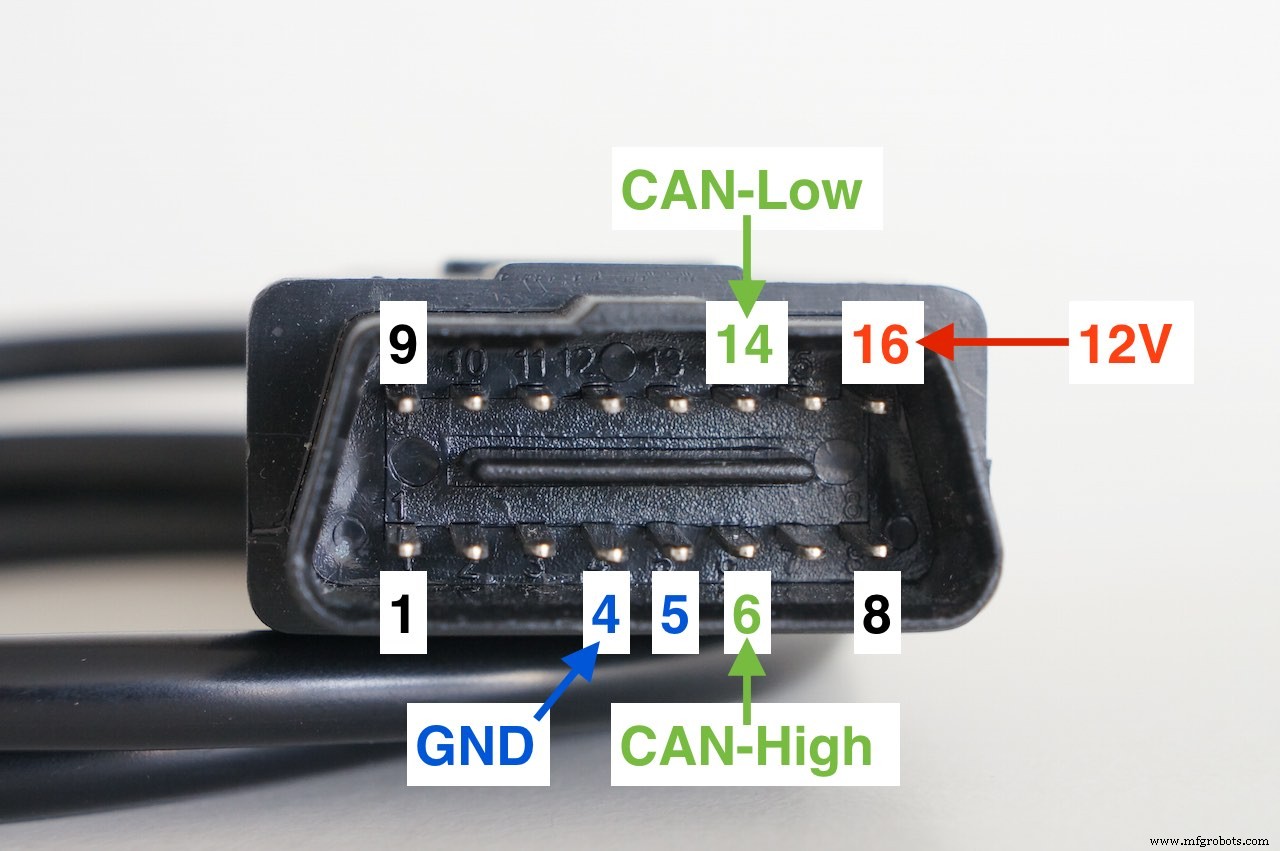


Quando você faz seu próprio cabo, é uma boa ideia usar um cabo de rede de par trançado antigo. Use um daqueles fios emparelhados para CAN-H e CAN-L. Isso irá melhorar a integridade do sinal. Além disso, NÃO exceda 1 m de comprimento, para minimizar as reflexões do sinal.
Comece
Etapa 1
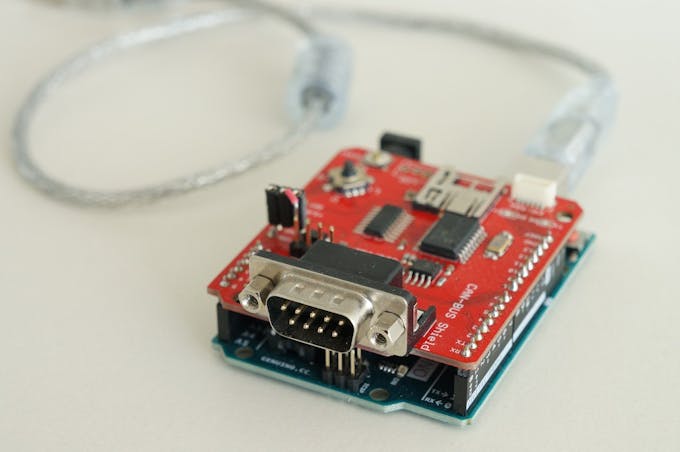
Prepare o hardware e encontre uma caixa legal para as placas.


Etapa 2
Baixe o projeto do meu repositório github. Veja os detalhes lá para instalação. Compile o código e atualize-o no Arduino.
Etapa 3
Conecte-se ao carro e ligue-o. Inicie a sessão de diagnóstico e obtenha informações úteis sobre a bateria ...
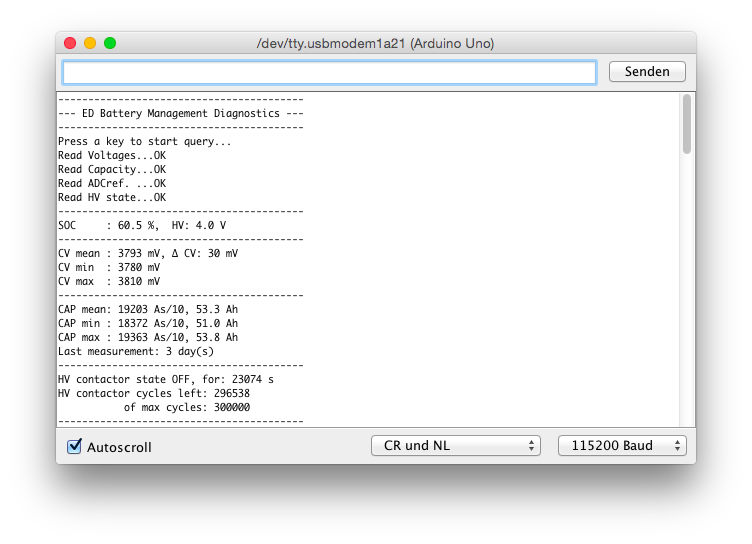
Etapa 4
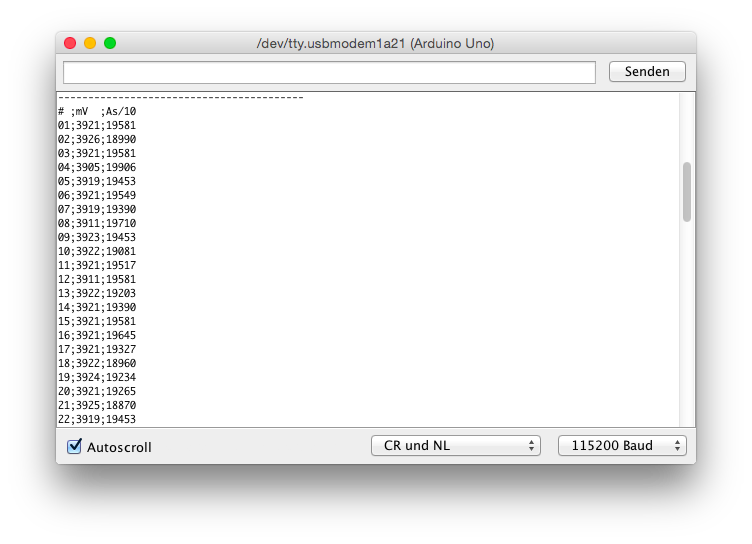
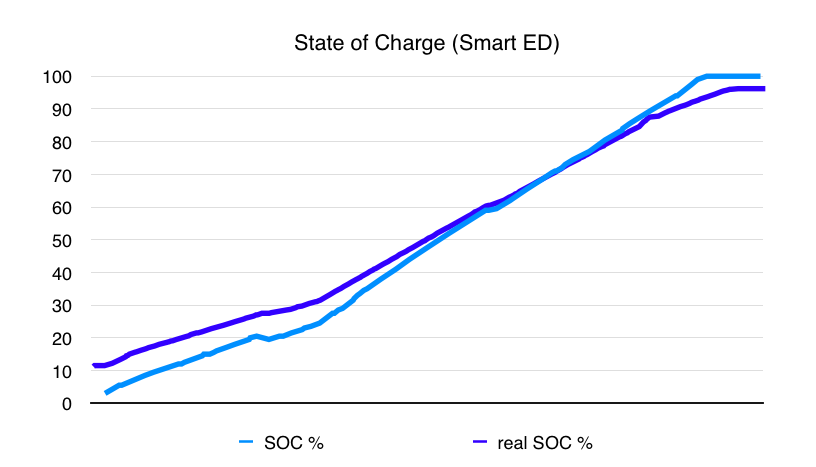
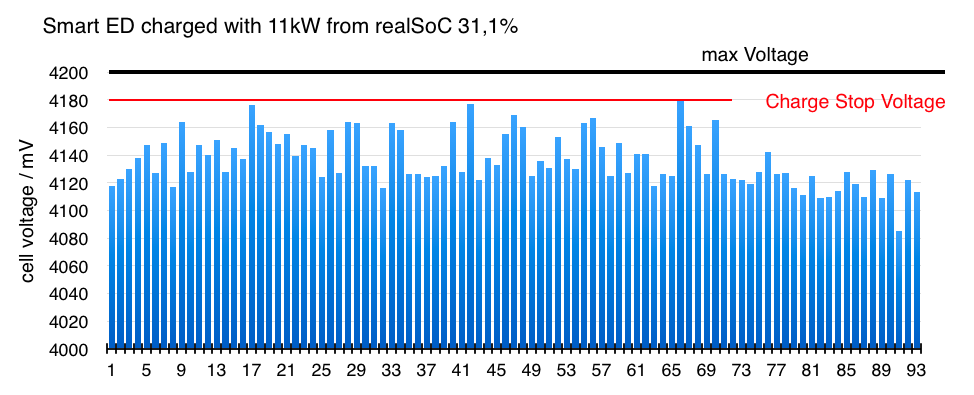
Use um programa de planilha e descubra dados correlatos. Por exemplo, compare o SOC (State of Charge, do painel) com o SOC real do BMS. Ou plote as voltagens das células e veja se algumas células estão limitando o pacote durante o carregamento, porque elas atingem o limite de corte no início ...
Etapa 5
Melhore o código se quiser - faça seu próprio hacking. O escudo Spakfun tem um leitor de cartão SD, para que você possa construir seu próprio logger de barramento CAN.
Ou você constrói um bom front-end / aplicativo exibindo os dados ...
Espero que esta ferramenta seja útil - Divirta-se!
Código
Software ED_BMSdiag Arduino
https://github.com/MyLab-odyssey/ED_BMSdiag.gitEsquemas
para escudo CAN-Bus Sparkfun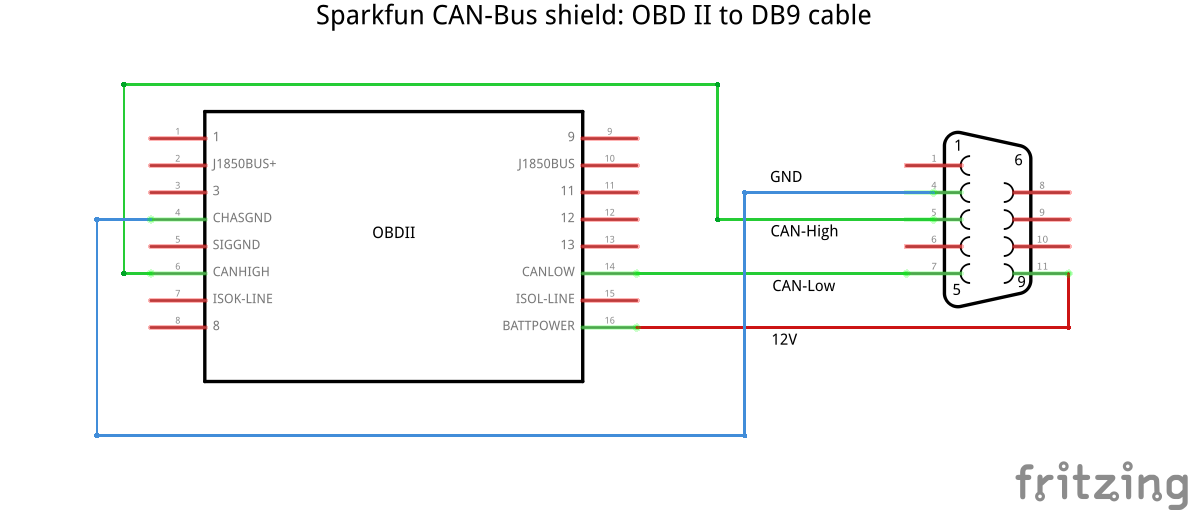 para escudo CANdiy
para escudo CANdiy 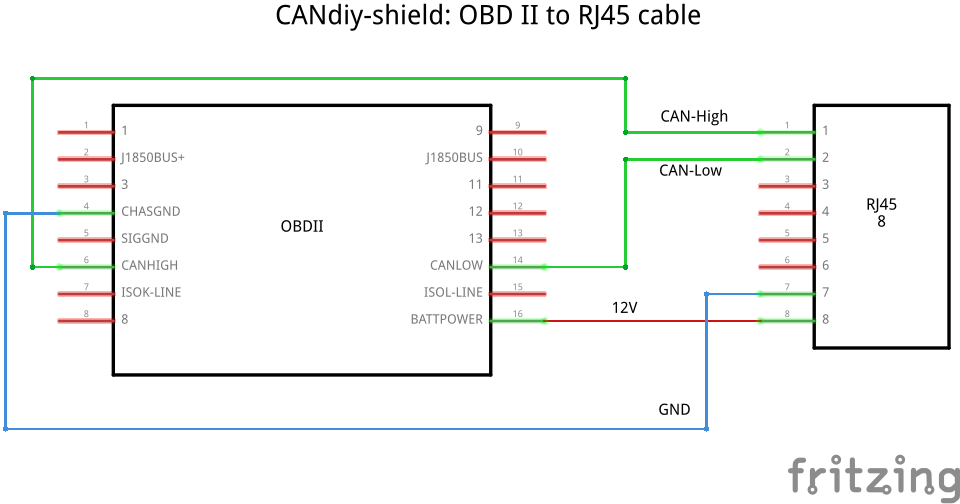
Processo de manufatura