


Bug Feio
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Aplicativos e serviços online
 |
|
Sobre este projeto
Antecedentes
Aqui está um pequeno robô rápido e fácil que pode ser construído e montado em cerca de meia hora com as ferramentas e peças certas.
Eu não inventei. Eu vi um vídeo de algo assim no YouTube e pensei 'Ei, parece divertido, vou construir um.'
Então peguei alguns servos da minha caixa de sucata, uma velha bateria de celular que eu guardava na esperança de encontrar algo legal para fazer com ela, um Arduino Pro 3.3v que comprei por capricho porque precisava atingir a cota de entrega gratuita e foi trabalhar.
Mais ou menos uma hora depois, aqui estava!
Montagem
Vamos começar com a montagem básica.
Corte o braço de montagem oposto ao lado de onde os fios saem em um dos servos (este será o seu servo traseiro). O servo traseiro aponta para baixo e o outro para a frente. Você pode usar cola ou abraçadeiras para mantê-los juntos.

Em seguida, conecte um fio vermelho e um preto ao positivo e ao negativo da bateria do seu celular (eu os mantive no lugar com um pouco de fita isolante). Se você tem uma bateria de íons de lítio, não precisa se preocupar com isso :)
Em seguida, colei a mini placa de ensaio na bateria. Você não precisa, é claro. Depende se você planeja reutilizar as partes deste robô ou não.
Prenda a bateria e a placa de ensaio ao cabo de contenção do servo.
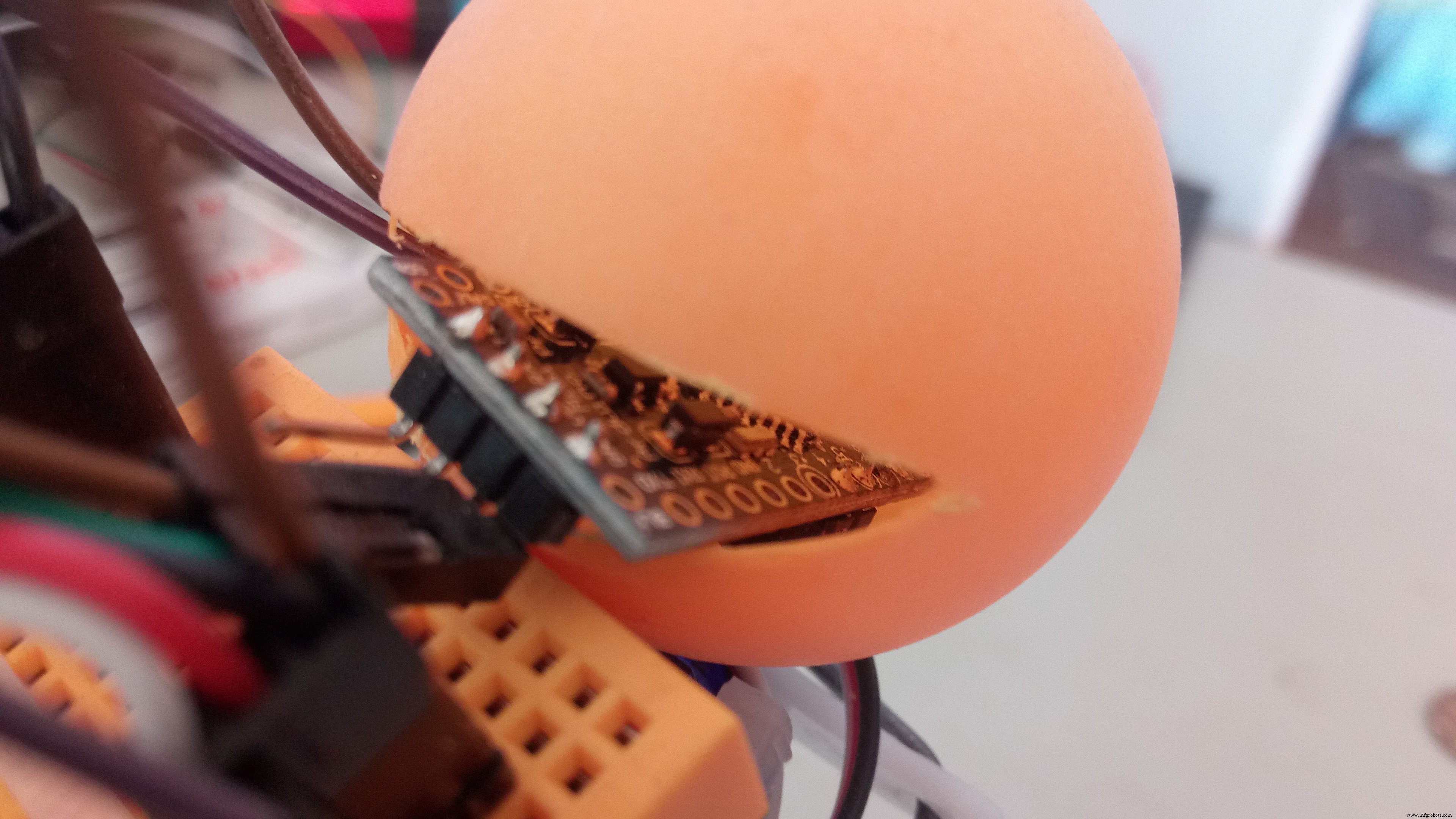
Corte uma cunha na bola de pingue-pongue. Parece fácil, certo? :) É possivelmente a etapa mais difícil de todo este tutorial! Uma bola de pingue-pongue é incrivelmente sólida e também ... redonda. Cortar as coisas exige paciência. E vestir óculos !!! Não importa qual dispositivo você usa para cortá-lo. O plástico (ou qualquer outro material estranho de que o meu era feito) se estilhaça muito. Então, óculos ! Quero que você ainda possa ler o restante deste tutorial depois de terminar de cortar!
Verifique se o seu Arduino se encaixa bem no orifício. E, em seguida, cole a bola de pingue-pongue no resto do animal.
Para as pernas, deixo você com seu próprio dispositivo. Os meus eram um pedaço simples de fio de aço com 1 mm de espessura dobrado para dentro e ao redor da montagem da asa dos servos (como na foto). No final de cada perna, coloquei um pequeno corte de pé de um bastão de cola para segurar.
Basta aquecer o fio com um isqueiro e plantá-lo em seu pé substituto. a cola derreterá com o contato e solidificará novamente muito rapidamente.
Antes de prender as pernas ao resto do monstro, você precisará fazer o circuito e carregar o esboço na placa. Você precisará ler sobre isso se não souber como fazer o upload de um esboço para o Arduino Pro Mini. https://www.arduino.cc/en/Guide/ArduinoProMini
O código para este é extremamente simples, então não irei examiná-lo.
Ele tem um atraso de 5 segundos no final da configuração para que você tenha tempo de desconectar o Arduino antes que as pernas comecem a se mover, mas depois de centralizá-las.
Agora você pode colocar suas pernas e parafusá-las no lugar.
Uma vez que as pernas estão aparafusadas no lugar, você pode até escolher editar o programa e reduzir (ou remover) o atraso na linha 13.
Demonstração
Se tudo correr bem, agora você deve ter um garotinho fofo parecido com isto:
E confira o vídeo do Triceratops do ClaudioGasp nos comentários! É incrivel!
Código
- Bug
Bug Arduino
#includeint FRONT =4; int BACK =5; Servo frontLegs, backLegs; void setup () {pinMode (13, OUTPUT); // Isso é apenas para o frontLegs.attach (FRONT) piscando; backLegs.attach (BACK); frontLegs.write (90); // Centralize o servo backLegs.write (90); // Centralize o atraso do servo (5000); // Aguarde 5 segundos (isso nos dá tempo para desconectar o arduino // para que possamos fixar as pernas.} Void loop () {digitalWrite (13, HIGH); // LED on delay (200); frontLegs.write (70 ); // mova a perna da frente com um pequeno atraso (200); backLegs.write (70); // mova a perna para trás um pouco digitalWrite (13, LOW); // Atraso apagado do LED (200); frontLegs.write (110); // mova a perna da frente um pouco mais tarde (200); backLegs.write (110); // mova a perna da frente um pouco}
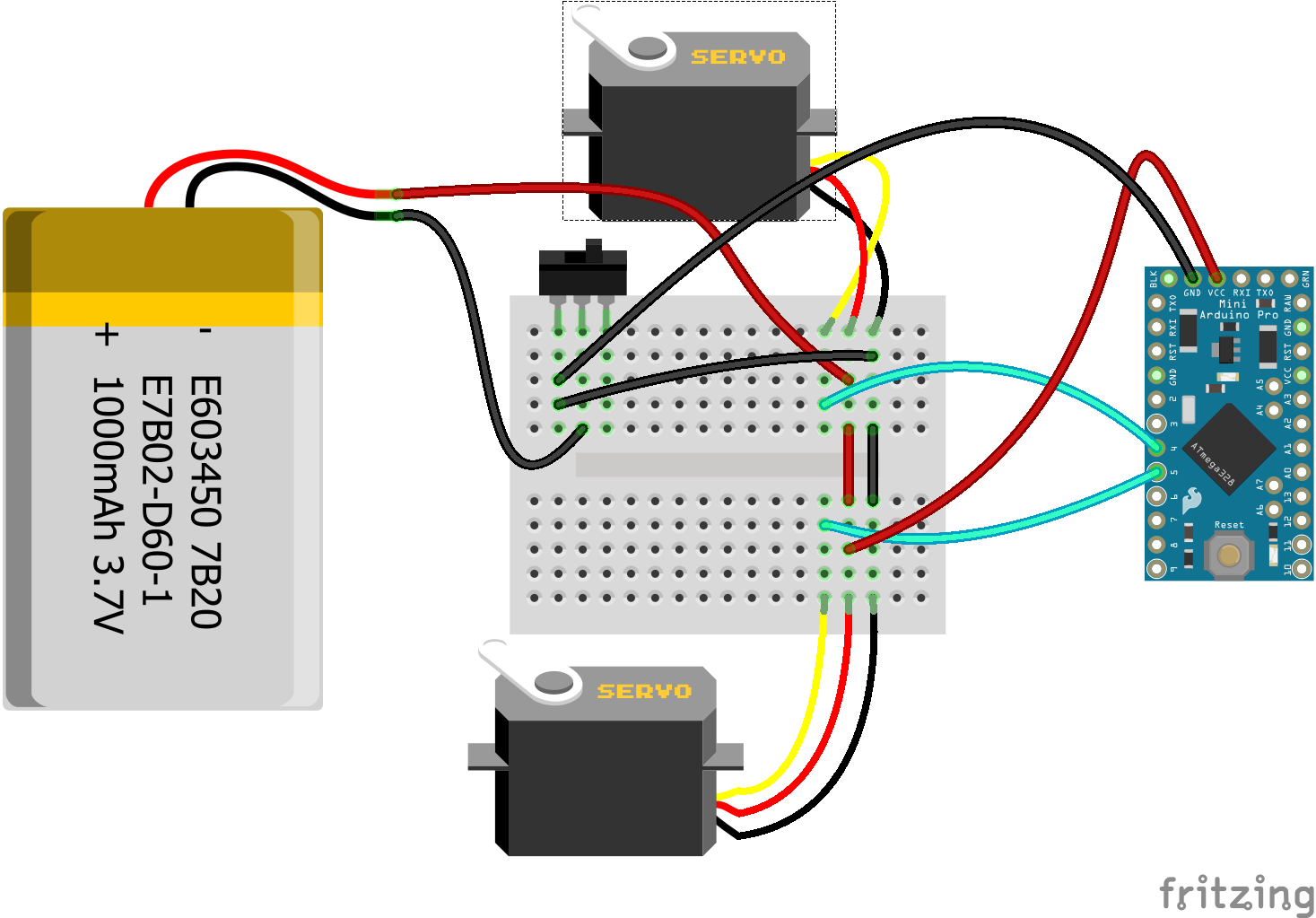
Esquemas
bug_Yr3jFYFuNQ.fzzProcesso de manufatura