


Estudo de caso:como a Kane Robotics alcançou o polimento orbital com o RoboDK
Acabamento de superfície com um robô — é um aplicativo que você pode não ter considerado antes.
Você pode se perguntar:existe um bom efetor final para realizar lixamento ou polimento com um robô? E quão fácil é programar um robô com tal finalizador?
Mas a equipe da Kane Robotics encontrou uma maneira de integrar facilmente o robô e o novo efetor de lixamento orbital ao RoboDK.
Vamos ver como eles fizeram isso!
Lixar e polir são os tipos de tarefas que são tradicionalmente difíceis de automatizar. No passado, você tinha que investir muito em uma lixadeira automática – do tipo que ocupa metade do espaço em sua oficina e custa uma pequena fortuna – ou teria que fazer a tarefa manualmente.
O problema de fazer o acabamento de superfície manualmente é que é um trabalho demorado, fisicamente difícil e fornece uma qualidade inconsistente. Parece a tarefa perfeita para um robô!
Nos últimos anos, o acabamento de superfícies com um robô industrial tornou-se uma opção viável. Ao adicionar um sensor de força ao efetor final do robô, você pode usar o controle de força para fornecer um acabamento de superfície consistente com uma ferramenta de lixamento orbital.
Como resultado, os robôs industriais agora podem ser usados para tarefas de acabamento de superfície que exigem um alto grau de consistência, como polimento de pás de hélice para aeronaves…
… que é exatamente o que a equipe fez na Kane Robotics.
Apresentando… Kane Robotics
Kane Robotics é uma empresa de integração de automação com sede na Califórnia, EUA. Eles atendem principalmente o setor de aviação e aeroespacial e fornecem soluções de automação para fabricantes de alta mistura/baixa produção.
Eles descrevem a missão da empresa como:“Liberar a força de trabalho aeroespacial qualificada de tarefas de fabricação repetitivas e demoradas por meio do uso de soluções de automação flexíveis, de baixo custo e inovadoras.”
Em particular, eles ajudam os fabricantes aeroespaciais com aplicações como retificação, lixamento, acabamento, dosagem de epóxi, perfuração e manutenção de máquinas.
O projeto da empresa envolveu o polimento da pá da hélice de uma aeronave.
O Projeto:Polimento da Lâmina da Hélice
As pás da hélice são uma peça de engenharia delicada e impressionante. Eles são o principal meio pelo qual um avião atinge seu empuxo no ar. Qualquer erro em seu processo de fabricação pode levar a uma ineficiência na propulsão da aeronave ou, no pior dos casos, a um desastre.
A etapa de polimento é vital na fabricação de aviões. O mau acabamento da superfície pode causar arrasto desnecessário no ar e fazer com que o avião use mais combustível do que o necessário.
Além disso, a Federal Aviation Administration (FAA) desaconselha fortemente o polimento após a fabricação da hélice, pois pode danificar os delicados revestimentos de proteção que são adicionados à superfície da pá. Como resultado, a etapa de polimento durante a fabricação é o último momento para obter aquele acabamento de superfície tão importante.
A equipe da Kane Robotics começou a produzir uma aplicação de polimento usando um robô e um novo tipo de efetor final de lixamento orbital especialmente projetado para acabamento de superfície robótico.
O robô foi obrigado a polir com precisão a lâmina da hélice usando este efetor final.

Integrando uma lixadeira orbital pronta para robô com o RoboDK
Parte da motivação da equipe para se submeter a este projeto foi testar um novo efetor final de lixamento orbital que eles estavam usando.
Um problema comum com o acabamento de superfície robótico é que ele requer controle de força. Quando estamos lixando ou polindo manualmente, podemos controlar com precisão a força aplicada pela ferramenta de acabamento. Com um robô, a maneira mais comum de fazer isso é adicionar um sensor de força e programar a conformidade ativa na ferramenta. Isso pode ser difícil de programar.
O efetor final que a Kane Robotics usou facilita a implantação do acabamento robótico de superfície do que no passado, incorporando a conformidade na própria ferramenta.
A lixadeira orbital compatível
O efetor final em questão foi a lixadeira orbital compatível com AOV-10 da ATI, também disponível como componente UR+.
Esta nova ferramenta foi especialmente projetada para facilitar o lixamento robótico. Ele incorpora a conformidade pneumática no eixo da ferramenta de lixamento orbital, dando ao robô a capacidade de reagir a mudanças sutis na superfície da peça de trabalho.

Como Alan Hiken, COO da Kane Robotics, explicou:
Um dos benefícios de usar o RoboDK com novas opções de End of Arm Tooling (EOAT) como esta é que é muito fácil adicionar um novo efetor final dentro do software, como explicamos em nosso artigo anterior O Guia de 5 minutos para usar qualquer extremidade Efetor com RoboDK.
Sua configuração de hardware e software
A configuração usada pela equipe da Kane Robotics foi razoavelmente simples, graças à ferramenta de lixamento da ATI.
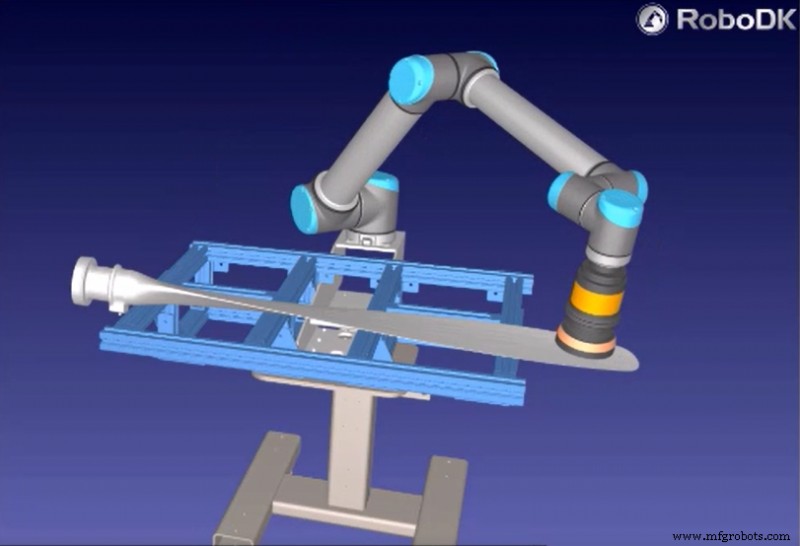
Os principais componentes de sua configuração foram:
- Um robô colaborativo da Universal Robotics.
- A ferramenta de lixamento orbital ATI AOV-10.
- Uma mesa na qual foi fixada a pá da hélice.
- RoboDK para programação offline.
Sem essa lixadeira orbital específica, a equipe pode ter que integrar um sensor de força externo. Isso aumentaria a complexidade tanto da configuração do hardware quanto da programação do robô.
Com o RoboDK, sua programação era simples.
Por que a Kane Robotics usou o RoboDK?
O RoboDK permitiu que a equipe colocasse o aplicativo em funcionamento de forma rápida e fácil.
A programação consistiu apenas em uma atividade de planejamento de caminho, que pode ser realizada no RoboDK em apenas alguns passos.
Aqui está o que o COO Alan Hiken disse sobre o RoboDK:
Quando perguntado por que eles usaram o RoboDK, ele simplesmente disse:“Se você tem os dados CAD, por que não os usaria?”
Dificilmente podemos discutir!
Quais aplicações você poderia alcançar com o RoboDK? Conte-nos nos comentários abaixo ou participe da discussão no LinkedIn, Twitter, Facebook, Instagram ou no RoboDK Forum.
9 Excelentes Aplicações de Robôs na Indústria Têxtil
Robôs de manuseio de materiais:uma introdução prática
Robô industrial
- Como reduzir o desperdício com robôs autônomos
- Como construir um codificador automático variacional com TensorFlow
- O que é eletropolimento e polimento eletrolítico | Junying Serviços de acabamento de superfícies metálicas
- Cuidando de máquinas CNC? Veja como fazer isso com um cobot
- Como lidar com os arranhões no espelho de aço inoxidável
- Treinamento de Robô Gratuito com RoboDK
- Estudo de caso:Melhorando o fluxo de trabalho de manufatura aditiva
- Como um engenheiro conseguiu gravar com robô sem poeira com o RoboDK
- Como começar com a programação de robôs Yaskawa
- Como começar com o RoboDK para Raspberry Pi